全自動無人駕駛軌道交通車輛技術(shù)研究
2022-01-05 06:09:44呂元穎
上海電氣技術(shù) 2021年4期
關(guān)鍵詞:故障
呂元穎
上海軌道交通設(shè)備發(fā)展有限公司 上海 200245
1 軌道交通車輛自動化等級
根據(jù)國際公共交通協(xié)會的定義,軌道交通車輛運行的自動化水平劃分為五個等級,分別為GoA0、GoA1、GoA2、GoA3、GoA4。軌道交通車輛自動化等級具體內(nèi)容見表1。

表1 軌道交通車輛自動化等級
GoA3等級已可以實現(xiàn)軌道交通車輛在正線上有人值守下自動運行,不需要配備傳統(tǒng)司機(jī),但仍需要配備具有綜合能力的乘務(wù)員,實現(xiàn)車輛上下線和應(yīng)急事件處理等工作。GoA4等級是軌道交通車輛的最高自動化等級,可以實現(xiàn)無人值守下的自動運行,達(dá)到全自動無人駕駛的要求。軌道交通全自動無人駕駛技術(shù)指將傳統(tǒng)車輛司機(jī)執(zhí)行的工作完全交由自動化、高度集中控制的車輛運行系統(tǒng)完成[4-5],所有車輛在地面控制中心統(tǒng)一指揮下自動運行,車輛通常應(yīng)具備自動喚醒、自動休眠、自動出入車輛段、自動清洗、自動行駛、自動加減速、自動啟停車、自動開關(guān)門等功能,并且具有常規(guī)運行、降級運行、災(zāi)害工況等多種運行模式。
軌道交通全自動無人駕駛技術(shù)是一門綜合性技術(shù),除車輛專業(yè)外,還需要通信、信號、供電、軌道、站臺門、綜合監(jiān)控、運營、維保等其它專業(yè)通力合作,共同完成場景功能討論、架構(gòu)接口定義、研究設(shè)計、綜合聯(lián)調(diào)聯(lián)試等工作[6-7]。
2 全自動無人駕駛技術(shù)優(yōu)勢
目前,國內(nèi)各大城市軌道交通的運營主要采用GoA2或GoA3等級。GoA2等級為司機(jī)監(jiān)督下車輛自動運行等級,GoA3等級為有人值守車輛自動運行等級。這兩種等級在正線運營中已實現(xiàn)車輛自動化運行的要求。由于GoA4等級車輛具備自動化運行的多種功能,與前兩個等級相比,不需要司機(jī)或乘務(wù)員值守車輛,可以完全實現(xiàn)無人全自動運行。相比GoA2和GoA3等級,GoA4等級全自動無人駕駛技術(shù)主要有四方面優(yōu)勢。
第一,全面提升運營管理水平,提高整體運營效率。全自動無人駕駛技術(shù)可以實現(xiàn)全程車輛自動化操作,縮短車輛準(zhǔn)備時間、發(fā)車時間、折返時間、發(fā)車間隔時間。運營中心可以根據(jù)乘客數(shù)量在線自動調(diào)節(jié)發(fā)車間隔和在線車輛數(shù),以達(dá)到最優(yōu)的乘客和在線車輛比。對于車輛正線運行故障,可以通過遠(yuǎn)程隔離、復(fù)位、旁路,提高處理操作的準(zhǔn)確性和及時性,提高車輛故障排除效率。
第二,綜合提升系統(tǒng)的安全性、可靠性、可用性。全自動無人駕駛車輛通過提高系統(tǒng)自動化程度,減少人為操作,降低誤操作的可能性,提升系統(tǒng)的安全性。同時,通過在車內(nèi)外增設(shè)車輛輪廓、輪軌、軸溫、振動、弓網(wǎng)、煙火報警等全方位車輛綜合檢測,進(jìn)一步提高車輛的安全性。通過提升車輛軟硬件能力,增強(qiáng)車輛自檢功能,采用冗余互備,實現(xiàn)提升系統(tǒng)的可靠性和可用性。
第三,降低運營人員勞動強(qiáng)度,優(yōu)化人力資源配置,提升服務(wù)質(zhì)量。全自動無人駕駛技術(shù)不單純?yōu)榱藴p少司機(jī)或乘務(wù)員,而是為了實現(xiàn)優(yōu)化人力資源配置,提升服務(wù)質(zhì)量。原本通過司乘操控車輛的機(jī)械式動作可由系統(tǒng)代替,車輛運行狀態(tài)和客室場景可由運營中心遠(yuǎn)程監(jiān)控。運營中心和站臺可以通過無線通信系統(tǒng)直接面向乘客提供服務(wù)。全自動無人駕駛運營是連貫而系統(tǒng)化的,在單車上發(fā)現(xiàn)的服務(wù)需求,可及時利用整條線路資源去調(diào)配服務(wù)。
第四,綜合降低運營維保成本,提升乘客的舒適性。全自動無人駕駛車輛能夠充分利用區(qū)間線路工況,通過車輛牽引、惰行、制動模式的組合,按照優(yōu)化后的速度曲線運行,從而達(dá)到節(jié)省能耗、降低成本、提升乘客舒適性的目的。同時,提升各種運營和維保場景的自動化等級,配置智能化設(shè)備,根據(jù)條件降低人車比,降低人力資源成本。
3 全自動無人駕駛車輛場景
與目前軌道交通主流采用的GoA2或GoA3等級車輛相比,全自動無人駕駛軌道交通車輛的運營場景更加復(fù)雜和多樣。在初期設(shè)計過程中,設(shè)計者需要綜合其它專業(yè),對每個運營場景進(jìn)行分析和設(shè)計[8]。首先,對線路運營過程中的所有運營場景進(jìn)行預(yù)規(guī)劃,包括正常、應(yīng)急、故障三大類場景。其次,針對每個場景充分考慮乘客的行為、車輛及外界環(huán)境可能出現(xiàn)的狀況。最后,對各專業(yè)系統(tǒng)的功能提出合理需求,對職責(zé)承擔(dān)進(jìn)行清晰分配,對接口功能進(jìn)行明確定義。上海軌道交通15號線全自動無人駕駛車輛定義的基本場景如圖1所示,共分為41個基本場景,綠色序號代表正常場景,紅色序號代表應(yīng)急或故障場景。

圖1 全自動無人駕駛軌道交通車輛基本場景
4 全自動無人駕駛車輛功能設(shè)計
根據(jù)全自動無人駕駛軌道交通車輛場景分析和設(shè)計結(jié)果,對整車所有子系統(tǒng)進(jìn)行詳細(xì)功能設(shè)計。由于采用無人駕駛方式,因此車輛的功能設(shè)計都需要充分考慮安全性、可靠性、運營和維保效率[9]。以上海軌道交通15號線全自動無人駕駛車輛的功能為參考,典型功能設(shè)計包括13個方面。
4.1 自動喚醒和休眠
相比非全自動駕駛車輛,全自動無人駕駛車輛具備自動喚醒和休眠功能,如圖2所示。由排班系統(tǒng)或人工對車輛基地或正線休眠的車輛實施喚醒作業(yè),可通過排班系統(tǒng)根據(jù)出入庫計劃自動喚醒和休眠,也可由調(diào)度員通過信號系統(tǒng)執(zhí)行遠(yuǎn)程喚醒和休眠,還可通過人工登車喚醒和休眠。前兩種方式受信號系統(tǒng)控制,喚醒和休眠控制功能由車載蓄電池供電。

圖2 全自動無人駕駛軌道交通車輛喚醒和休眠功能
4.2 系統(tǒng)自檢
車載信號喚醒后,對全自動運行必需的車輛功能執(zhí)行綜合自檢,包括車載信號設(shè)備自檢,以及開關(guān)車門、施放制動等聯(lián)合自檢,同時車輛完成子系統(tǒng)車輛網(wǎng)絡(luò)系統(tǒng)及網(wǎng)絡(luò)通信、牽引、輔助供電、車門、空調(diào)、制動、乘客信息、廣播、監(jiān)控、煙火報警、軸端振動、溫度等的在線自檢。車輛自檢及靜、動態(tài)測試完成后,完成自檢報告,并自動上傳報告至運營中心,由運營中心判斷車輛是否可以參與正線運營。車輛自檢界面如圖3所示。

圖3 全自動無人駕駛軌道交通車輛自檢界面
4.3 精準(zhǔn)停車
車輛進(jìn)站后,自動對位停車。若發(fā)生欠停或過停小于5 m,車輛將自動采取跳躍調(diào)整,直至對準(zhǔn)停車點。若發(fā)生過停超過5 m,則車輛經(jīng)運營中心人工確認(rèn)后跳過本站直接運行至下一站,同時通過車載乘客信息系統(tǒng)向乘客廣播越站通知。
4.4 蠕動
車輛在全自動無人駕駛運行模式下,監(jiān)測到車輛網(wǎng)絡(luò)與信號網(wǎng)絡(luò)通信出現(xiàn)故障、車輛網(wǎng)絡(luò)故障,或出現(xiàn)牽引制動反饋異常工況,則車輛在區(qū)間停車,經(jīng)運營中心授權(quán)后進(jìn)入蠕動模式,以不高于25 km/h的速度自動運行到下一站,并自動扣車,由運營中心派工作人員登車處置。在運行期間,自動車輛防護(hù)系統(tǒng)監(jiān)督蠕動模式運行速度,若超速,車輛將進(jìn)行緊急制動。
4.5 車門與站臺門對位隔離
當(dāng)車輛在運營過程中發(fā)生車門開關(guān)故障時,車輛可關(guān)閉并鎖定故障車門,向信號系統(tǒng)報告故障車門位置,由站臺門系統(tǒng)電氣隔離對應(yīng)站臺門,在車輛停站時不操作開關(guān)門動作。反之,當(dāng)個別站臺門故障時,系統(tǒng)可關(guān)閉并鎖定故障站臺門,向信號系統(tǒng)報告故障站臺門位置,由信號系統(tǒng)將故障站臺門的位置發(fā)送給車輛,電氣隔離對應(yīng)的車門,使車門在停站時不動作。車門與站臺門故障隔離時,車輛應(yīng)觸發(fā)車門故障信息廣播,向乘客播報相關(guān)信息。
4.6 車門緊急解鎖
車輛客室內(nèi)設(shè)置有車門緊急解鎖手柄,乘客拉下緊急手柄后,解鎖信號上報運營中心,自動聯(lián)動車載監(jiān)控視屏。乘客可通過緊急對講裝置與運營中心工作人員對話。車門緊急解鎖功能激活時,車輛一般處于運行區(qū)間,則車輛以無人駕駛模式繼續(xù)保持運行。若車輛處于站臺區(qū)間,則車輛切除牽引并施加緊急制動,在車輛靜止后,經(jīng)運營中心開門授權(quán),乘客方可進(jìn)行車門解鎖和打開操作。
4.7 自動洗車
車輛根據(jù)作業(yè)計劃,自動運行至洗車庫前。自動或人工啟動洗車機(jī),車輛以3 km/h~5 km/h的洗車模式速度通過洗車機(jī),完成洗車。洗車結(jié)束后,自動或人工關(guān)閉洗車機(jī),車輛自動運行駛離洗車庫。
4.8 無線數(shù)據(jù)傳輸
車輛將檢測到的車輛狀態(tài)及故障信息通過4G或5G無線通信模塊傳送至運營中心,用于數(shù)據(jù)分析處理、故障診斷處理、各種場景判斷。同時,運營中心也可以通過無線通信實施對車輛的監(jiān)控,綜合提高車輛的運營和維保效率。車輛無線數(shù)據(jù)傳輸如圖4所示。
4.9 故障遠(yuǎn)程處理
傳統(tǒng)有司機(jī)監(jiān)督或乘務(wù)員值守的車輛發(fā)生故障時,可由司機(jī)或乘務(wù)員經(jīng)運營中心指揮后進(jìn)行故障處理。全自動無人駕駛車輛原則上均可通過運營中心進(jìn)行遠(yuǎn)程處理。全自動無人駕駛車輛在關(guān)鍵系統(tǒng)中采用冗余和旁路設(shè)計,在影響正常運行功能的關(guān)鍵電路中采用遠(yuǎn)程可復(fù)位斷路器,其操作如圖5所示。當(dāng)車輛發(fā)生故障時,車輛網(wǎng)絡(luò)控制系統(tǒng)可以自動執(zhí)行復(fù)位和旁路操作。如操作失敗,則由運營中心通過遠(yuǎn)程復(fù)位、隔離、旁路等操作手段處理車輛故障。
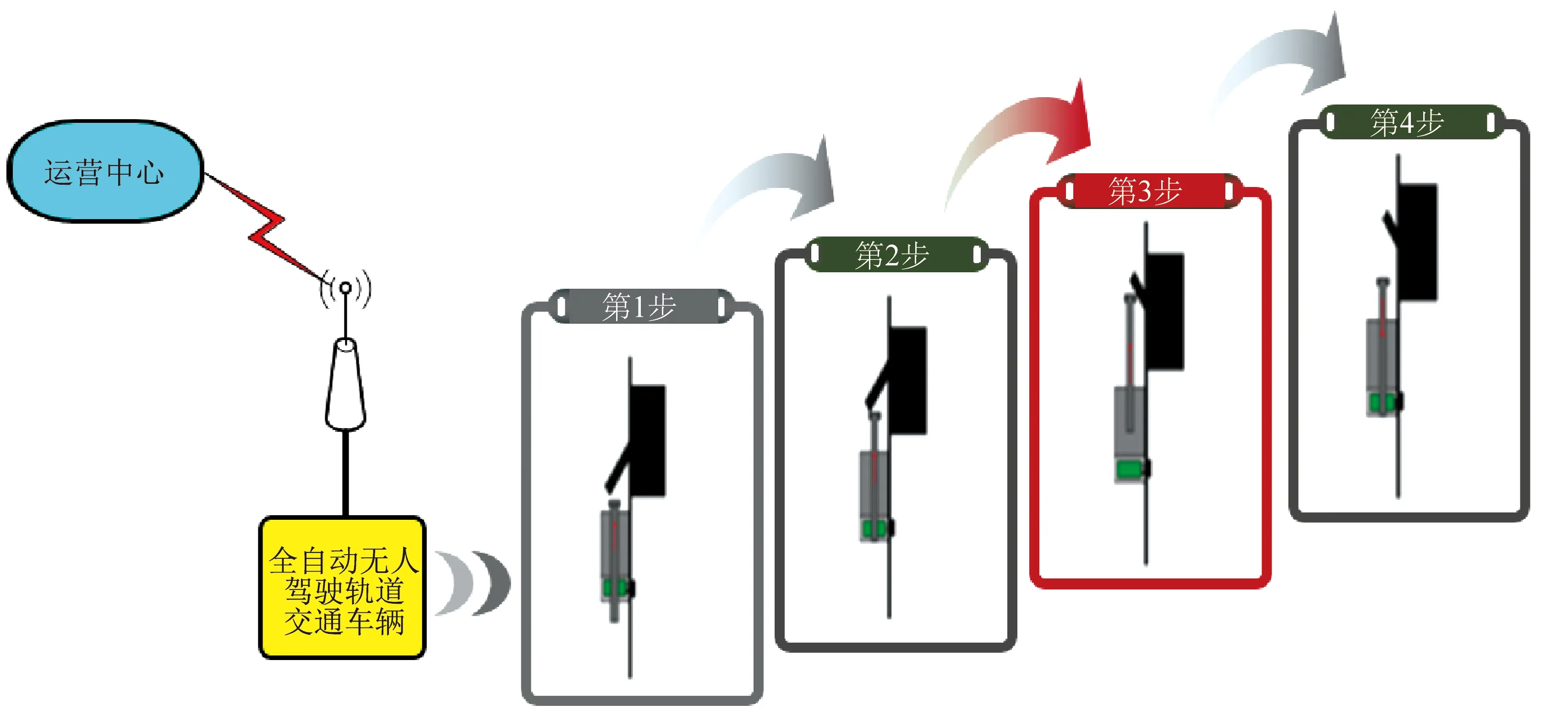
圖5 遠(yuǎn)程可復(fù)位斷路器操作
4.10 遠(yuǎn)程調(diào)控
相比有司機(jī)監(jiān)督或乘務(wù)員值守的車輛,全自動無人駕駛車輛在各子系統(tǒng)功能應(yīng)用方面可以實現(xiàn)遠(yuǎn)程調(diào)控,既可以對單車進(jìn)行遠(yuǎn)程調(diào)控,也可以對車隊進(jìn)行遠(yuǎn)程集控。例如,運營中心可以遠(yuǎn)程發(fā)送命令至車輛網(wǎng)絡(luò)系統(tǒng),對空調(diào)進(jìn)行模式轉(zhuǎn)換、溫度調(diào)節(jié)、新回風(fēng)門調(diào)節(jié)。車輛溫度遠(yuǎn)程集控界面如圖6所示。運營中心還可以遠(yuǎn)程調(diào)取車輛弓網(wǎng)監(jiān)控視頻、前置攝像視頻、客室內(nèi)監(jiān)控視頻等。

圖6 全自動無人駕駛軌道交通車輛空調(diào)溫度遠(yuǎn)程集控界面
4.11 障礙物探測與脫軌檢測
全自動無人駕駛車輛在轉(zhuǎn)向架上裝有障礙物探測及脫軌檢測設(shè)備,保證車輛的安全可靠,如圖7、圖8所示。一旦探測到影響車輛運行安全的軌面障礙物或脫軌風(fēng)險,車輛立即切除牽引,并觸發(fā)緊急制動,同時將車輛狀態(tài)信號發(fā)送至運營中心,由運營中心人工設(shè)置相應(yīng)的防護(hù)區(qū),防護(hù)區(qū)內(nèi)其它車輛立即切除牽引并觸發(fā)緊急制動。與此同時,調(diào)動工作人員至事發(fā)車輛地點處理。障礙物探測時,通過在轉(zhuǎn)向架構(gòu)架前端安裝主動接觸式探測梁來進(jìn)行分析判斷。當(dāng)探測到軌道上有障礙物時,探測梁會通過觸發(fā)行程開關(guān)進(jìn)行報警,執(zhí)行車輛緊急制動。脫軌檢測時,通過安裝在軸端的三向振動檢測設(shè)備進(jìn)行檢測分析,同時通過軸溫檢測設(shè)備對車軸溫度進(jìn)行監(jiān)控。

圖7 全自動無人駕駛軌道交通車輛障礙物探測設(shè)備

圖8 全自動無人駕駛軌道交通車輛脫軌檢測設(shè)備
4.12 救援
當(dāng)車輛在運營過程中發(fā)生故障無法動車時,由運營中心調(diào)度員指揮實施救援。首先,調(diào)度員調(diào)用車載監(jiān)控視頻查看客室內(nèi)情況,遠(yuǎn)程觸發(fā)預(yù)設(shè)的緊急廣播或進(jìn)行人工廣播,安撫乘客,同時可編輯文字發(fā)送至車載乘客信息系統(tǒng)進(jìn)行顯示。其次,選擇相鄰車輛作為施救車,對施救車扣車清客。再次,調(diào)度員派出工作人員和司機(jī)登乘施救車,以人工模式駕駛車輛至故障車所在區(qū)段的相鄰區(qū)段,轉(zhuǎn)為限速模式接近故障車,連掛故障車,并緩解故障車制動。最后,司機(jī)以限速模式駕駛施救車以推進(jìn)或牽引的方式將故障車推進(jìn)或牽引至站臺清客,駕駛連掛車輛至就近停車線或車輛段退出運營,同時運營中心調(diào)整運營計劃。
4.13 開放式司機(jī)室
為了使乘客有更好的乘車體驗,全自動無人駕駛車輛采用開放式司機(jī)室設(shè)計,不設(shè)司機(jī)室側(cè)門[10],如圖9所示。車輛將設(shè)備和系統(tǒng)集成化,兼顧合理布局,采用封閉但可展開的司機(jī)臺、可展開的司機(jī)室座椅,寬敞的客室與司機(jī)室完美過渡融合。前端司機(jī)室設(shè)置逃生通道,確保在緊急狀況下迅速安全疏散乘客。逃生通道打開需經(jīng)運營中心授權(quán)。

圖9 全自動無人駕駛軌道交通車輛開放式司機(jī)室
5 結(jié)束語
筆者介紹了軌道交通車輛自動化等級分類和全自動無人駕駛技術(shù)的定義,通過與傳統(tǒng)軌道交通車輛自動運行技術(shù)進(jìn)行對比,得出全自動無人駕駛技術(shù)具有提升運營管理水平和效率,提升整體系統(tǒng)安全性、可靠性、可用性,降低運營人員勞動強(qiáng)度,優(yōu)化人力資源配置,降低運營維保成本,提升乘客舒適性等優(yōu)勢。以上海軌道交通15號線車輛為例,對全自動無人駕駛車輛場景進(jìn)行規(guī)劃、分析和設(shè)計,并對整車典型功能設(shè)計展開論述。各類傳感器數(shù)據(jù)采集、無線通信數(shù)據(jù)傳輸、計算機(jī)智能控制及分析診斷等基礎(chǔ)類技術(shù)的不斷進(jìn)步,將帶動車輛系統(tǒng)深度融合、車輛無線數(shù)據(jù)傳輸、車車無線通信、全方位檢測、運維一體化、智能駕駛、多元化信息等課題實現(xiàn)深入研究和迅速發(fā)展,從而進(jìn)一步提升軌道交通車輛運行全過程的自動化水平,同時提升軌道交通車輛自動運行技術(shù)的安全性、可靠性和運營維保效率。
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年8期)2015-04-17 03:32:52
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年7期)2015-04-17 02:12:40
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39