基于改進二維Otsu算法的電機故障識別研究*
2022-01-06 08:35:56張龍威楊向宇
艦船電子工程 2021年12期
張龍威 楊向宇
(華南理工大學電力學院 廣州 510640)
1 引言
電機廣泛應用于工業生產活動中,電機的狀態監測和故障診斷受到很大的關注。傳統的電機在線狀態監測,是通過采集電機的物理量對其進行狀態監測和故障診斷[1]。近年來,紅外熱成像技術因其無損、高效的特點以及技術發展,在實際應用中備受關注。紅外熱成像技術作為一種輔助的故障診斷技術[2],能夠以非接觸的方式監測溫度,一般電機發生故障時都伴隨溫度升高,該技術能夠定性和定量分析電機故障前或故障時狀態[3]。當電機發生故障時,熱成像儀將拍攝上傳大量熱成像圖片,計算機需要實時快速提取高溫區域來定位故障點,因此需要準確高效的圖像分割技術作保障。
圖像分割是圖像處理的重要環節,此類方法以前多以人工選擇溫度分割閾值的方式進行熱圖像像素分類以及高溫區提取,該方法只注重物體溫度的絕對值而忽視物體間溫度的相對值,自適應能力差,易受環境溫度影響,并不能準確地分割出高溫區域,而Otsu圖像閾值分割法[4]能夠自動計算最適應閾值,精確分割目標區域進行故障點定位。傳統一維Otsu分割法將圖像分割成前景和背景,方法簡單,效果良好,應用廣泛,但是受干擾影響較大,因此,二維Otsu圖像閾值分割的方法被提出[5],其分割精度顯著上升,抗干擾能力大大增強,但是復雜度提升至二維,計算時間提高,為了降低計算時間,許多學者提出了不同的改進方法,有從優化尋優算法出發的基于自適應遺傳算法的改進Otsu算法[6]和基于改進易經占卜進化的圖像分割算法[7],有從優化分割算法出發基于迭代閾值的改進Otsu算法和多維算法獨立分維處理以及其他通過修改多維坐標系等方法進行改進[8~10]。
螢火蟲算法首次于2008年由劍橋學者Xin-She Yang提出,傳統的螢火蟲算法仍有易陷入局部解、早熟等缺點,許多學者提出了與混沌策略相結合的改進[11],基于慣性權重的改進[12],基于自適應種群大小的改進以及與其他算法融合等解決方案[13~14]。
因此,本文將提出一種基于改進螢火蟲尋優的二維Otsu圖像閾值分割算法,該方法的主要思想將改進螢火蟲算法運用在二維Otsu圖像分割法的目標函數的求解問題上,解出圖像分割的最佳閾值并對其進行圖像分割,在保證分割閾值精確的基礎上解決了計算復雜度高、計算時間長的缺點。
2 基本原理
2.1 二維Otsu法原理
傳統一維Otsu圖像閾值分割法主要原理是最小二乘法推廣到圖像分割應用中,但其抗干擾能力差,為了解決上述問題,引入了鄰域平均灰度值,將該點的灰度值i與其鄰域平均灰度值j合并成一個二元組(i,j),引出了二維Otsu圖像閾值分割法。
與一維Otsu圖像閾值分割法類似,設一副灰度圖像的像素灰度值為L=[0,1,…,L-1],計算灰度值為i,鄰域平均灰度值為j的像素點的頻數為nij,其出現的概率為pij為

存在閾值(s,t),s為灰度閾值,t為鄰域均值閾值,將圖像的像素點分成四類,如圖1所示。

圖1 二維直方圖的俯視圖
選取圖1中A區域為背景部分,B區域為前景部分,C、D區域為噪聲部分,即:

則背景A類和前景B類二者的概率分別為


背景A類和前景B類的均值向量組以及總均值如式(5)~(7)所示。
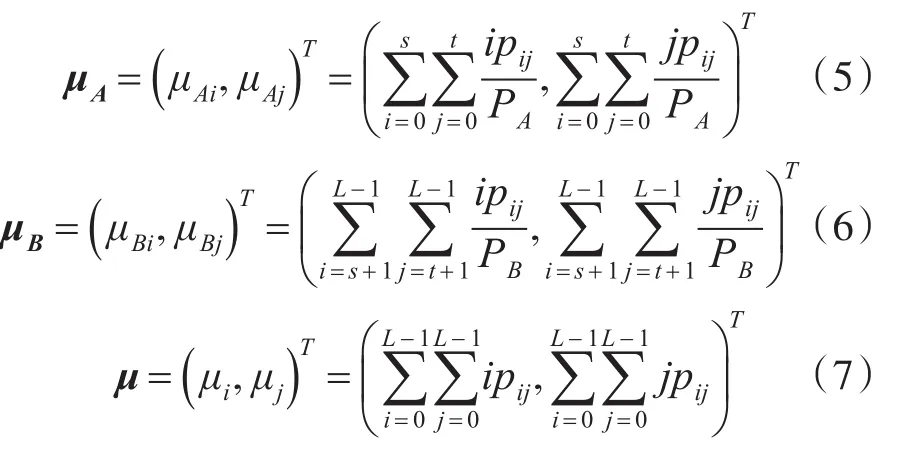
對比一維Otsu圖像閾值分割法類間方差的概念,此處引入了離散測度矩陣S(s,t),如式(8)所示。
取離散測度矩陣的跡tr(S(s,t)),如式(9)所示。

當取得最佳二元閾值組(s0,t0)時,上述離散測度矩陣的跡 tr(S(s,t))得最大值,即類間方差最大,令最佳閾值為,并以T0為閾值對圖像進行分割,二維Otsu圖像閾值分割得到最佳效果。
而上述計算需要遍歷所有(i,j)的取值,通過比較得到最大的離散測度矩陣的跡來確定最佳閾值,遍歷計算以及方差計算使得經典方法計算量大,實時性差,而求取二維Otsu算法的最佳閾值就是一種尋優的過程,本文引用螢火蟲算法進行求優。
2.2 螢火蟲算法原理
2.2.1 基本螢火蟲算法
螢火蟲算法數學模型如下[15]。
定義在n維空間中每個螢火蟲的位置X如式(10)所示。

定義螢火蟲的吸引度β(γ)如式(11)所示。

式中的β0為初始吸引度,即兩只螢火蟲之間空間距離為0時的吸引度;γ為光強吸收系數;R為兩只螢火蟲之間的空間距離。
每只螢火蟲都只向著看上去比自己更亮的螢火蟲飛去,則螢火蟲的移動模型如式(12)所示。

上式表示第i個螢火蟲向著更亮的第j個螢火蟲移動,式中的Xi為第i個螢火蟲的初始位置;表示亮度高的螢火蟲影響其他螢火蟲移動;α·rand是防止解陷入局部最優解而設置的隨機項;α為步長因子,且α∈[0,1];rand為隨機因子矩陣,rand矩陣中的每個因子∈[-0.5,0.5],一般取均勻分布或是正態分布。
2.2.2 基于模擬退火因子的螢火蟲算法
如式(14)所示,螢火蟲個體總會向著看上去比自己更亮的螢火蟲飛去,隨著迭代次數的增加,螢火蟲群會在最優解附近聚集,同時,最亮的螢火蟲移動模型如式(13)所示,在求解最終階段易出現震蕩,會影響最終解的精度和收斂速度。

為了解決上述問題,本文在螢火蟲算法中引入了模擬退火因子,在迭代初期,步長因子設定相對較大,隨著迭代次數的增加,步長因子逐漸減小,即螢火蟲個體越靠近最優解時移動距離越短,使得螢火蟲個體可以在迭代初期快速定位最優解的位置,在迭代后期可以更加精確得到最優解。具體引入方法如式(14)所示。

該式表示了步長因子α與迭代次數t的關系;式中α0為初始步長因子,本文取α0=0.97;MG為最大迭代次數;λ為控制因子,用來控制最大迭代周期內全局搜索和局部搜索占據的比重,本文取λ=400。
為了驗證引入控制因子λ的作用,取α(t)=0.97t、的圖像分別表示不引入控制因子和引入控制因子時最大迭代次數為10和1000時的步長,仿真結果如圖2所示。
如圖2(a)所示,當不引入控制因子時,當最大迭代次數遠小于200時,步長依舊很長,仍易出現震蕩,當最大迭代次數遠大于200時,步長過短收斂極慢,搜索能力大大降低,失去了全局搜索能力,因此,需要引入控制因子,建立與最大迭代次數相關的步長因子公式。
如圖2(b)、(c)所示,當引入控制因子時,最大迭代周期為10和1000時,分別在第5代和第500代步長因子就接近0,即有接近一半的迭代周期為全局搜索,剩下的迭代周期為局部搜索,既保證了快速性的同時也保證了準確性。

圖2 三種步長計算收斂情況對比
通過引入模擬退火因子,使得螢火蟲算法在迭代前期能夠快速定位最優解不陷入局部最優解,并在迭代后期能夠提高解的精度。
2.3 基于改進的螢火蟲算法的二維Otsu圖像閾值分割法
2.3.1 螢火蟲算法與二維Otsu圖像閾值分割算法的結合
將螢火蟲算法與二維Otsu圖像閾值分割算法相結合本質就是用求優智能算法簡化求解二維Otsu分割法的閾值(s,t),通過改進智能算法,使其避免陷入局部最優解以及使其求解時間縮短和解更加準確。
將二維Otsu閾值分割法求取最大類間方差作為螢火蟲算法的目標函數,如式(15)所示,此時閾值(s,t)為圖像分割的最佳閾值。

應用螢火蟲算法有以下假設。
1)所有螢火蟲不分性別,除了亮度完全一樣;
2)吸引度只與亮度與距離有關,吸引度與亮度成正比與距離成反比;
3)螢火蟲亮度由目標函數決定。
2.3.2 算法流程圖以及尋優步驟
基于改進螢火蟲算法的二維Otsu圖像閾值分割法流程圖如圖3所示。

圖3 本文算法流程圖
1)具體步驟如下:
讀取灰度圖,采集各像素點灰度值i及其鄰域平均灰度值j組成二元數組(i,j),并對其進行統計得出頻數矩陣fij256×256從而計算得到頻率矩陣pij256×256;
2)初始化螢火蟲種群,設置最大迭代數Max-Generation,種群螢火蟲數量num,隨機步長因子的大小α,傳播介質的光強吸收系數γ,初始吸引度β,并初始化螢火蟲的位置;
3)計算每個螢火蟲對應的亮度,即二維Otsu圖像分割法類間方差;
4)根據螢火蟲移動公式模型,更新螢火蟲新的位置;
5)尋找并記錄亮度最大的螢火蟲,即二維Otsu圖像分割法最大類間方差;
3 實驗結果及分析
為了驗證本文研究的效果,本文選取電機運行時的熱成像灰度圖進行仿真實驗。仿真實驗電腦配置為Win7,Intel Core i5-4590 CPU 3.30GHz,8GB RAM,64位操作系統,仿真軟件為Matlab。
實驗對象是一臺水輪異步發電機,電機具體參數如下:額定功率為400kV·A,額定電壓為400V,額定頻率為50Hz,額定功率因數為0.8,額定電流為577A,額定轉速為800r/min。
實驗條件:發電機工作在輸出功率為200kW條件下,室溫為33°。本文算法實驗參數如下:螢火蟲個數num=12,迭代次數為MG=20次,初始步長因子α=0.97,光吸收系數為β=1,光強系數γ=1。
本文選取定子接線頭處為主要分割區域,同時設置分割區域在圖像中心以及邊緣,如圖4(a)、圖5(b)紅圈所示,使用傳統一維Otsu分割法、傳統二維Otsu分割法以及本文提出的基于改進螢火蟲算法的二維Otsu分割法對熱成像灰度圖進行分割比較,結果如圖5~圖6所示。

圖5 分割區域在圖像邊緣
通過比較圖4與圖5中三種算法分割的效果圖,可以看出,一維otsu算法中接線柱可以被粗略分割出來,但包含大量白色噪聲點,產生較大誤差,分割效果不佳;二維otsu算法中接線柱都被準確地分割出來,白色噪聲點較少,分割效果良好。對比表1和表2中傳統二維Otsu算法與本文算法得到的閾值,二者計算結果接近,因此能夠得出本文算法具有同傳統二維Otsu算法一樣的抗噪分割能力。

表1 分割區域在中心的算法對比

表2 分割區域在邊緣的算法比較
通過比較表1和表2中兩種二維Otsu算法的運行時間,可以看出,相比傳統二維Otsu算法,本文算法運行時間極大縮短。綜上,不論分割區域在圖像中心還是邊緣位置,本文算法在保證分割效果的同時極大地縮短了運行時間,有很好的可行性和高效性。
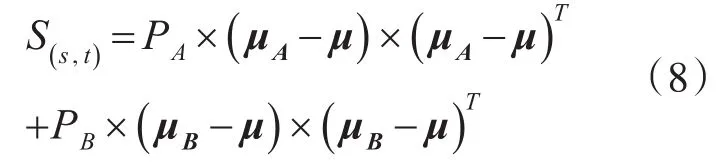
同時,參數設置的調整也會影響實驗結果和運行時間。針對本文的改進算法,以分割區域在邊緣的圖像為對象,調整迭代次數MG和種群數量num進行多次實驗,仿真結果如表2~表3所示。
表3 迭代次數對仿真的影響

表4 種群數量對仿真的影響
從表2和表3中可以看出,迭代次數MG影響效果比較明顯,而種群數量num相對影響效果弱。迭代次數不足25次時,計算并未收斂,而超過25次后只是徒增計算時間,種群數量也是如此,當隨著迭代次數和種群數量的增多,計算結果逐漸準確,只需選取達到精度的最小迭代次數和種群數量即可,從而可以看出本文選取實驗參數較優。
4 結語
熱成像因其低成本非接觸的優點,已經成為一種電機狀態監測的輔助技術。Otsu作為最流行的自動閾值分割技術之一,有原理簡單效果明顯等優點,同時也有抗噪能力差等缺點,二維Otsu提升了抗噪能力,但增大了計算量。為了縮短計算時間,本文將群智能算法與二維Otsu結合,提出基于引入模擬退火因子的螢火算法的二維Otsu圖像閾值分割算法,將二維Otsu的閾值求解作為螢火蟲算法的目標函數進行尋優,通過對比實驗得出本文的算法閾值選取圖像分割效果良好,并且計算時間和實時性都有很大的改進,因此說明本文算法能夠高效快速分割電機灰度圖,為未來電機故障時實時處理大量故障熱圖提供技術參考,為圖像分割后再實時分析處理做下基礎。