有限元分割的共軛方向優(yōu)化算法
2022-01-06 12:32:54李有堂梅鶴齡
電子設(shè)計工程 2021年24期
李有堂,梅鶴齡
(蘭州理工大學(xué)機(jī)電工程學(xué)院,甘肅蘭州 730050)
隨著科技的進(jìn)步和發(fā)展,精密、超精密設(shè)備與加工技術(shù)標(biāo)志著一個國家制造領(lǐng)域的尖端技術(shù)水平,已成為當(dāng)今世界各國進(jìn)行科技競爭的一個重要手段[1]。計算機(jī)的快速發(fā)展以及互聯(lián)網(wǎng)的迅速普及,信息在互聯(lián)網(wǎng)上爆發(fā)式增長,文本、圖像、音頻、視頻等的發(fā)展導(dǎo)致表達(dá)數(shù)據(jù)需要更高的維度[2]。這些改變無疑對數(shù)據(jù)類問題的處理提出了更高的要求,不僅對數(shù)據(jù)的處理效率和便捷度提出了要求,對估算計算的數(shù)值要求有更高的準(zhǔn)確度(誤差降低到滿足要求的范圍內(nèi))。
無約束優(yōu)化算法作為最優(yōu)化方法的基礎(chǔ),在交通運輸、工農(nóng)業(yè)生產(chǎn)、金融、貿(mào)易等眾多領(lǐng)域有著廣泛應(yīng)用。伴隨著信息技術(shù)的飛速發(fā)展,變量維數(shù)的劇增以及結(jié)構(gòu)復(fù)雜性的增強(qiáng),能有效求解大規(guī)模無約束優(yōu)化問題的算法顯得尤為重要[3]。在優(yōu)化算法的發(fā)展過程中,1964 年由鮑威爾提出的共軛方向法(Conjugate Direction Method)起到了舉足輕重的作用。共軛方向法可以在有限步數(shù)內(nèi)找到二次函數(shù)的極值點和極值,并且對非二次函數(shù)只要具有連續(xù)二階導(dǎo)數(shù),也是一種有效的算法[4]。但是,共軛方向法的主要缺點是更換方向后所產(chǎn)生的n個矢量有可能是近似線性相關(guān)的,即這些矢量接近于平行。這樣就會出現(xiàn)維度退化現(xiàn)象,導(dǎo)致只能找到局部最優(yōu)解,有可能使真正的全局最優(yōu)解漏掉[5]。
針對共軛方向法的該缺陷,在實際工程應(yīng)用中通過與其他算法組合或?qū)λ惴ㄟM(jìn)行改進(jìn)以提高解決問題的準(zhǔn)確度[6]。例如:在一些優(yōu)化問題中,當(dāng)粒子群算法(PSO)經(jīng)過一段時間的迭代后,會陷入局部最優(yōu)解的局部極小值中,這時采用共軛方向法,以局部最優(yōu)解作為初始猜測,將高維函數(shù)優(yōu)化問題轉(zhuǎn)化為低維函數(shù)優(yōu)化問題,幫助粒子群算法克服局部極小問題[7];對于移動機(jī)器人全局路徑規(guī)劃問題,先用共軛方向法搜索局部最優(yōu)解,再用改進(jìn)模擬退火算法(SAA)跳出局部最優(yōu)解,依此更新溫度值,如此反復(fù)操作,直至找到全局最優(yōu)解[8];針對遺傳模擬退火算法的局部搜索能力不足,并且有可能早熟和遺失最優(yōu)解的問題,提出一種將遺傳模擬退火算法和共軛方向法相結(jié)合的混合遺傳模擬退火算法[9];還有對多維優(yōu)化問題的求解,通過對Powell 機(jī)械優(yōu)化方法的改進(jìn),提出了方向組不降維的構(gòu)造共軛方向法[10]。
隨著科技的發(fā)展,基礎(chǔ)科學(xué)也在進(jìn)步,對于不同的優(yōu)化問題采用不同的優(yōu)化算法,一些有約束問題往往采用無約束優(yōu)化算法進(jìn)行求解。通過以上綜合分析,提出了一種求解有約束優(yōu)化問題的有限元分割共軛方向法,可以杜絕所求優(yōu)化解為局部最優(yōu)解的產(chǎn)生。
1 共軛方向法
共軛方向法是利用共軛方向作為搜索方向的無約束極小算法,而且已證明這類算法應(yīng)用于具有正定Hesse 矩陣的二次函數(shù)時,最多n次迭代即可達(dá)到極小點。這類算法具有有限收斂性,形成共軛方向的方法很多,每一種不同的構(gòu)造共軛方向的方法形成一種具體的共軛方向法,因而共軛方向法是一大類算法[4]。
1.1 共軛方向法基本原理
m個n維向量S1,S2,…,Sm,滿足=0,i≠j且A正定,則這m個向量一定是線性無關(guān)的。在n維空間中的任意向量,均可以用n個線性無關(guān)的n維向量表示。
設(shè)目標(biāo)函數(shù)為:

它的極小點為X*,初始點X0,S0,S1,S2,…,Sn-1為關(guān)于A的n個共軛向量,則有:

將式(2)寫成差分格式:

式(3)表明,經(jīng)(k+1)次迭代后,Xk+1→X*,Xk+1為目標(biāo)函數(shù)沿Sk方向的一個極小點。則:

對于二元二次函數(shù)只需進(jìn)行兩次直線搜索就可以求到極小值點。


圖1 二元二次函數(shù)搜索圖
1.2 共軛方向法
共軛方向法具有二次終止性,是一個概念性算法,實現(xiàn)算法的關(guān)鍵在如何選取共軛方向[11],不同的選取會產(chǎn)生不同的共軛方向法。其通用格式如下:
第一步:任取X0∈Rn,0 ≤ε<<1,k=0,計算g0=g(X0)和初始點X0的下降方向d0,s.t.;第二步:求解minf(Xk+αdk),λ≥0,得解αk(即αk是一維搜索的最優(yōu)解);
第三步:計算αk、Xk+1,使得Xk+1=Xk+αkdk;
第四步:若Xk+1滿足迭代終止準(zhǔn)則‖gk+1‖≤ε,停止迭代,輸出Xk+1;否則,轉(zhuǎn)至第五步;
第五步:根據(jù)共軛方向的構(gòu)造方法獲得搜索方向dk+1,使得dTk+1Gdj=0,j=0,1,…,k。令k=k+1,轉(zhuǎn)至第二步。
共軛方向法的程序流程圖如圖2 所示。

圖2 共軛方向法的程序流程圖
2 有限元分割共軛方向法
許多優(yōu)化算法在理論上是用來解決無約束優(yōu)化問題的,但是在實際工程問題中往往需要解決的是有約束的優(yōu)化問題[12],所以一些有約束優(yōu)化問題往往采用無約束優(yōu)化算法進(jìn)行求解[13]。針對共軛方向法所求解有可能為局部最優(yōu)解的問題,對共軛方向法加以改進(jìn),用以求解有約束的優(yōu)化問題。算法執(zhí)行過程如下所示:
第一步:任取X0∈Rn,X0=(x1,x2,…,xn),若x1∈[a1,b1],x2∈[a2,b2],…,xn∈[an,bn],ai,bi∈R,i=1,2,…,n。將各個維數(shù)的取值區(qū)間進(jìn)行有限分割,按各個維數(shù)的區(qū)間劃分節(jié)點進(jìn)行排列組合。例如:令xi=[ai,b1]∪[c1,c2]∪,…,∪[cm-1,cm]∪[cm,bi],然后依次取區(qū)間分割節(jié)點ai,c1,c2,…,cm,bi為xi的值,最后將xi的節(jié)點其他xj的節(jié)點依次進(jìn)行排列組合,取得初始點X0,m∈R,i≠j,i=1,2,…n,j=1,2,…n。
第二步:取初始點X0,0 ≤ε<<,1,k=0,計 算g0=g(X0)和初始點X0的下降方向d0,s.t.dT0g0<0;
第三步:求解minf(Xk+αdk),λ≥0,得解αk(即αk是一維搜索的最優(yōu)解);
第四步:計算αk,Xk+1,使得Xk+1=Xk+αkdk;
第五步:若Xk+1滿足迭代終止準(zhǔn)則‖gk+1‖≤ε,停止迭代,輸出Xk+1,將其保存于極值保存數(shù)組,然后轉(zhuǎn)至第一步選取新的起始點;否則,轉(zhuǎn)至第六步;
第六步:根據(jù)共軛方向的構(gòu)造方法獲得搜索方向dk+1,使得。令k=k+1,轉(zhuǎn)至第三步。
第七步:根據(jù)極值保存數(shù)組所得各個極值中求取最小值點,最后輸出在該約束內(nèi)的全局最優(yōu)解。
有限元分割共軛方向法的程序流程圖如圖3所示。

圖3 有限元分割共軛方向法的程序流程圖
3 目標(biāo)函數(shù)的算例驗證
以求解f(x)最小值為例:
目前多數(shù)優(yōu)化問題的解決依賴于計算機(jī)軟件,如MATLAB 軟件的優(yōu)化工具箱[14],可用MATLAB 根據(jù)以上兩種算法的執(zhí)行過程進(jìn)行編程,然后用所編程序分別求解以上目標(biāo)函數(shù)的最優(yōu)解。
3.1 共軛方向法的算例驗證
根據(jù)圖2 所介紹的共軛方向法的程序流程圖用MATLAB 進(jìn)行編程,定義精度為0.000 01,計算程序如下:


選取不同初值X0進(jìn)行迭代計算,可以得到不同的極值和極值點,如表1 所示。
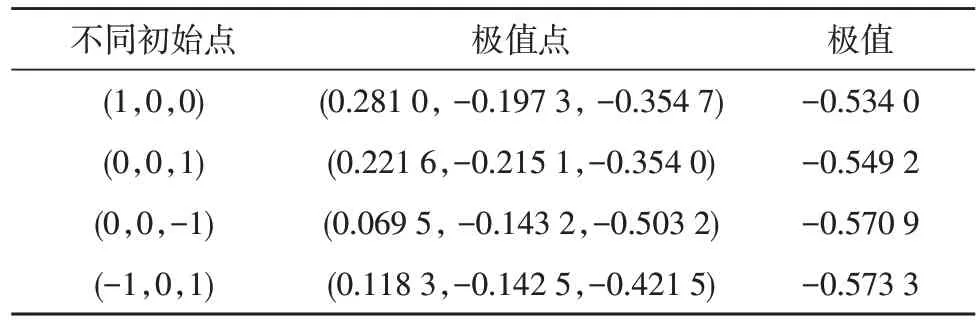
表1 共軛方向法不同初始點迭代結(jié)果
從計算結(jié)果可以看出,雖然定義的精度相同,但是選擇不同的初始點進(jìn)行迭代,所得到的極值點和極值各不相同,并且計算結(jié)果的差距較大。該結(jié)果充分證明了共軛方向法存在的缺點,會陷入局部極值而無法找到全局最優(yōu)點。就科技的發(fā)展而言,計算速度已不是問題,最主要的問題是計算結(jié)果的準(zhǔn)確度,這就意味著需要更優(yōu)的計算方法解決準(zhǔn)確度問題[15]。
3.2 有限元分割共軛方向法的算例驗證
根據(jù)圖3 的有限元分割共軛方向法的程序流程圖進(jìn)行MATLAB 編程,定義精度也為0.000 01,并設(shè)置預(yù)期極值為0(所設(shè)預(yù)期極值應(yīng)大于最終計算極值,如果所設(shè)預(yù)期極值不大于計算極值,計算結(jié)果將會是設(shè)置的預(yù)期結(jié)果,需重新設(shè)置預(yù)期極值進(jìn)行重新計算),計算程序如下:


令初始點X0=(x1,x2,x3),由題知x1,x2,x3∈[-1,1],設(shè)每個分割單元的長度均相等,分割單元長度為0.1,則x1、x2、x3的分割節(jié)點可取為-1,-0.9,…,0.9,1。將所設(shè)參數(shù)代入所編程序中進(jìn)行迭代計算,可以得到最終的極值和極值點,如表2 所示。

表2 有限元分割共軛方向法迭代結(jié)果
由表2 所得極值與表1 所得極值進(jìn)行對比,可以得出表2 所得極值小于表1 所有極值。這說明有限元分割共軛方向法的迭代結(jié)果優(yōu)于共軛方向法,并且可以避免在求解過程中陷入局部最優(yōu)解的缺點。通過編程驗證可知,當(dāng)有限元分割共軛方向法的分割單元長度越小,則所得解越優(yōu),就當(dāng)今科技發(fā)展的程度,計算速度已不是問題[16],所以該優(yōu)化計算算法具有很大的實際應(yīng)用價值。
4 結(jié)論
該文在共軛方向法的基礎(chǔ)上提出了有限分割的共軛方向法,并通過MATLAB 編程對兩種算法的尋優(yōu)結(jié)果進(jìn)行對比,可得出的主要結(jié)論如下:
1)提出的有限元分割共軛方向法的迭代結(jié)果優(yōu)于共軛方向法,并且可以避免在求解過程中陷入局部最優(yōu)解的缺點。
2)有限元分割共軛方向法具有可移植性,可以根據(jù)不同的問題可以進(jìn)行不同參數(shù)設(shè)置,可以作為求解大規(guī)模優(yōu)化問題的主要方法。
3)有限元分割共軛方向法克服了最速下降法的慢收斂性,并且保留了共軛方向法的優(yōu)點,具有二次終止性。
4)有限元分割共軛方向法具有簡單、易于編程、需要的儲存空間小等優(yōu)點。
5)有限元分割共軛方向法不受維度限制,可以用于多維問題的求解。
6)當(dāng)有限元分割共軛方向法的分割單元長度越小,則所求解越優(yōu)。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
計算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
計算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
計算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
小天使·一年級語數(shù)英綜合(2015年2期)2015-01-14 06:35:05
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24