基于純方位的多無人機(jī)協(xié)同目標(biāo)跟蹤算法
2022-01-06 12:32:56辛沙歐陳可宋震林桂欣穎戚國(guó)慶
電子設(shè)計(jì)工程 2021年24期
關(guān)鍵詞:卡爾曼濾波
辛沙歐,陳可,宋震林,桂欣穎,戚國(guó)慶
(南京理工大學(xué)自動(dòng)化學(xué)院,江蘇南京 210094)
近年來,無人機(jī)技術(shù)發(fā)展迅猛,廣泛應(yīng)用于各領(lǐng)域之中。隨著電子對(duì)抗技術(shù)在現(xiàn)代戰(zhàn)爭(zhēng)中的地位越來越高,通過獲取目標(biāo)的方位、多普勒變化率、到達(dá)時(shí)間等信息確定目標(biāo)位置的無源定位研究逐漸吸引了更多的關(guān)注[1]。由于成本和重量的限制,無源純方位傳感器被廣泛應(yīng)用于被動(dòng)跟蹤中的無源定位。例如,分布式控制及定位中的純方位跟蹤[2]、包圍控制中的方位或相對(duì)視距觀測(cè)[3]、無人機(jī)編隊(duì)飛行的視覺導(dǎo)航與跟蹤[4]。純方位跟蹤系統(tǒng)是對(duì)目標(biāo)進(jìn)行連續(xù)觀測(cè),積累測(cè)角信息,從而獲得目標(biāo)狀態(tài)的精確估計(jì),包括目標(biāo)的位置和速度,從而控制觀測(cè)器進(jìn)行跟蹤[5]。多站無源組網(wǎng)定位技術(shù)作為更加有效的無源定位方法,己經(jīng)受到國(guó)內(nèi)外科研人員的高度重視[6]。
針對(duì)純方位目標(biāo)跟蹤問題,文獻(xiàn)[7-9]討論了純方位下的目標(biāo)估計(jì)策略,其中文獻(xiàn)[9]在文獻(xiàn)[7]中的估計(jì)器基礎(chǔ)上加入卡爾曼濾波,得到目標(biāo)狀態(tài)的無偏估計(jì),進(jìn)一步改善了目標(biāo)估計(jì)的精度,為運(yùn)動(dòng)目標(biāo)被動(dòng)跟蹤提供了更多的可能。
隨著任務(wù)和應(yīng)用的日益復(fù)雜,多無人機(jī)協(xié)同跟蹤問題越來越受到重視。常見的是研究一組移動(dòng)智能體對(duì)未知目標(biāo)的定位和繞航問題,目的是使智能體以期望的半徑圍繞目標(biāo)旋轉(zhuǎn),并在目標(biāo)周圍形成均勻的隊(duì)形[10-13]。Liya Dou 等[11]研究了一組移動(dòng)智能體基于純方位測(cè)量對(duì)靜止或者移動(dòng)目標(biāo)的定位和包圍問題,在文獻(xiàn)[7]的估計(jì)器基礎(chǔ)上,設(shè)計(jì)了分布式控制率,保證智能體群分別在目標(biāo)或其鄰域周圍全局收斂到一個(gè)精確的均勻圓形,估計(jì)誤差和控制誤差可以收斂到零的鄰域。針對(duì)未知目標(biāo),J.Shao 以及R.Li 在不同維度研究了定位與環(huán)航問題[14-15]。
現(xiàn)有的純方位量測(cè)下多無人機(jī)協(xié)同目標(biāo)定位與跟蹤的估計(jì)誤差和控制誤差只能收斂到零的鄰域,而不能收斂到零,尤其是對(duì)于快速移動(dòng)的目標(biāo)。因此,針對(duì)快速移動(dòng)的目標(biāo),如何提高目標(biāo)估計(jì)精度和減小控制誤差還有待進(jìn)一步研究。
該文研究了多無人機(jī)在二維環(huán)境下圍繞一個(gè)位置未知的運(yùn)動(dòng)目標(biāo)的控制器設(shè)計(jì),以及僅利用方位測(cè)量信息的精確目標(biāo)狀態(tài)估計(jì)器的設(shè)計(jì)問題。針對(duì)文獻(xiàn)[7]中的估計(jì)器方法,提出了結(jié)合卡爾曼濾波的方式,以獲得更加精確的目標(biāo)狀態(tài)。結(jié)果表明,相較于沒有濾波的作用,對(duì)于運(yùn)動(dòng)目標(biāo)的估計(jì)誤差收斂到零,而不是零的鄰域。針對(duì)文獻(xiàn)[11]中的控制器設(shè)計(jì)問題,通過引入虛擬交叉算法,加入目標(biāo)估計(jì)速度項(xiàng)對(duì)原有的控制器進(jìn)行改進(jìn),可以保證控制誤差收斂到零。最后,仿真結(jié)果驗(yàn)證了文中所提出的估計(jì)器以及控制律的優(yōu)越性。
1 預(yù)備知識(shí)與問題描述
1.1 圖 論
多無人機(jī)系統(tǒng)中N個(gè)無人機(jī)之間的通信情況可以采用無向圖G={V,E} 進(jìn)行描述,其中V={1,2,???,N}為無向圖節(jié)點(diǎn)的集合,E?V×V為無向圖的邊集。A=[aij]∈RN×N是加權(quán)鄰接矩陣,當(dāng)(i,j)∈E,aij=aji=1,(i,j)?E時(shí),aij=0。假設(shè)該圖沒有自循環(huán),則aii=0 。節(jié)點(diǎn)i的所有鄰域集合用Ni={j∈V:(i,j)∈E}表示。定義圖G的拉普拉斯矩陣為L(zhǎng)=[lij]∈RN×N,當(dāng)i≠j時(shí),lij=-aij,。在圖G中由節(jié)點(diǎn)i到節(jié)點(diǎn)j的路徑是以節(jié)點(diǎn)i為起點(diǎn),以節(jié)點(diǎn)j為終點(diǎn)的一系列不同邊的組合。如果圖G的每一對(duì)不同的節(jié)點(diǎn)都有一條路徑,則圖G是連通的。每個(gè)索引i都是對(duì)N求余得到的,例如,索引N+1 與1 等價(jià)[16]。
1.2 問題描述
首先,假設(shè)無人機(jī)可以在固定的高度飛行,因此只關(guān)注無人機(jī)在二維笛卡爾坐標(biāo)系下的目標(biāo)估計(jì)與定位。無人機(jī)與目標(biāo)在二維平面下的相對(duì)位置如圖1 所示。目標(biāo)及其估計(jì)位置用“+”表示,無人機(jī)的位置用“●”表示。
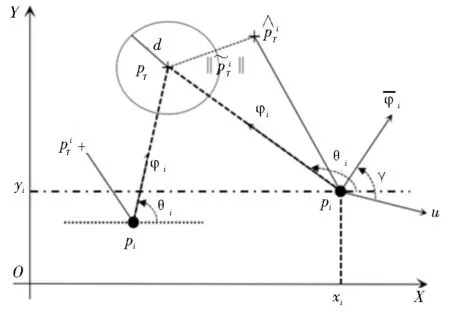
圖1 無人機(jī)與目標(biāo)相對(duì)位置圖形化視圖
考慮一個(gè)在時(shí)間t內(nèi)具有未知軌跡pT(t)=[xT(t),yT(t)]T∈R2的運(yùn)動(dòng)目標(biāo),和N個(gè)具有已知軌跡pi(t)=[xi(t),yi(t)]T∈R2的無人機(jī),其中i∈V。假設(shè)每個(gè)無人機(jī)的運(yùn)動(dòng)服從單積分模型:

其中,ui(t)表示無人機(jī)i的控制輸入。
無人機(jī)i對(duì)目標(biāo)的估計(jì)位置可以表示為。無人機(jī)i對(duì)目標(biāo)的觀測(cè)角為θi(t)∈[0,2π),與目標(biāo)相對(duì)距離用表示,無人機(jī)i與對(duì)目標(biāo)的估計(jì)位置的距離為,無人機(jī)i對(duì)目標(biāo)的估計(jì)誤差為。d為無人機(jī)與目標(biāo)期望間距,即期望環(huán)航旋轉(zhuǎn)半徑。用φi(t)∈R2表示無人機(jī)i指向目標(biāo)的單位方向向量,則:
(t)∈R2是φi(t)繞pi(t)順時(shí)針旋轉(zhuǎn)π/2 得到的垂直于φi(t)的單位向量。為了方便起見,假設(shè)逆時(shí)針旋轉(zhuǎn)方向?yàn)檎R虼耍瑹o人機(jī)i到無人機(jī)j的分離角(i<j)是通過從無人機(jī)i到目標(biāo)的射線逆時(shí)針旋轉(zhuǎn)直到遇見無人機(jī)j到目標(biāo)的射線:

為了設(shè)計(jì)一個(gè)分布式定位方案,利用純方位測(cè)量值來估計(jì)目標(biāo)的未知位置pT(t),然后設(shè)計(jì)基于局部測(cè)量的分布式控制律,從而實(shí)現(xiàn)以下目標(biāo):
①估計(jì)誤差收斂到0,即:

②無人機(jī)i與目標(biāo)之間的距離收斂到指定的相同環(huán)航半徑,即:

③一組無人機(jī)按照等角均勻分布在以目標(biāo)為中心的指定半徑的圓周上,即:

該文主要工作是基于以下假設(shè)進(jìn)行實(shí)現(xiàn)的:
假設(shè)1:存在正常數(shù)u0使得對(duì)于t>0 時(shí),且保證任一無人機(jī)i的速度滿足。
假設(shè)2:通信拓?fù)銰是無向連通的。
假設(shè)3:所選擇的pi(0)、pT(0)以及(0)能夠使得ρi(0)、是有限的。
2 算法設(shè)計(jì)
已知多無人機(jī)跟蹤位置未知的移動(dòng)目標(biāo)是一個(gè)估計(jì)和控制的綜合問題,因此這一部分,嘗試同時(shí)為每個(gè)無人機(jī)構(gòu)造估計(jì)器和控制器[17-19]。
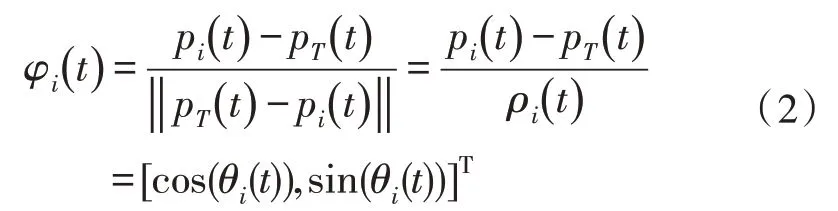
為了定位未知目標(biāo),首先為每個(gè)無人機(jī)提出如下協(xié)作的估計(jì)器:

其中,k是正常數(shù),φi(t)φi(t)T是向量φi(t) 的投影矩陣。目標(biāo)與無人機(jī)之間的幾何位置關(guān)系如圖2所示。
圖2 無人機(jī)與目標(biāo)之間的幾何位置關(guān)系圖
然后,基于無人機(jī)對(duì)目標(biāo)的估計(jì)位置以及鄰居節(jié)點(diǎn)的角度測(cè)量信息為每個(gè)無人機(jī)設(shè)計(jì)如下控制器:

其 中,kd、α是設(shè)計(jì)參數(shù),分離角誤差。
例如,當(dāng)N=5 時(shí),期望無人機(jī)能夠在以目標(biāo)為中心的具有指定半徑的圓周上形成如圖3 所示的等角編隊(duì)。
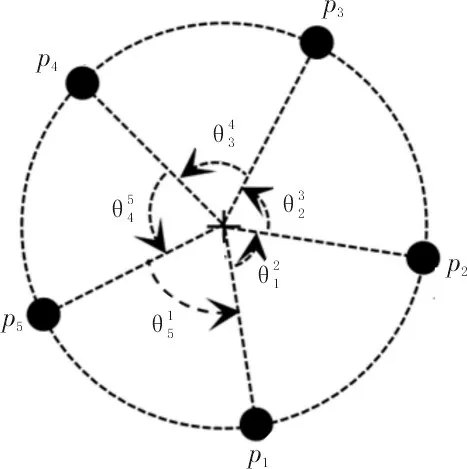
圖3 5個(gè)無人機(jī)期望隊(duì)形示意圖
控制輸入ui(t) 由兩部分組成。徑向項(xiàng)-d)φi(t) 控制無人機(jī)移動(dòng)到指定的環(huán)航跟蹤半徑的圓周上,切向項(xiàng)則保證各個(gè)無人機(jī)之間按照指定的角度分布在以目標(biāo)為中心的圓周上。另外,因?yàn)榍邢蝽?xiàng)依賴于各個(gè)無人機(jī)的期望距離,因此當(dāng)目標(biāo)期望距離較小時(shí),可以避免過高的角速度。
引理3.1[9]:在基于虛擬交叉算法[14]的式(7)估計(jì)器下,卡爾曼濾波得到的估計(jì)誤差,在t→∞時(shí)是漸近無偏的。其中。
引理3.2[11]:假設(shè)目標(biāo)是靜止?fàn)顟B(tài),在式(7)估計(jì)器和式(8)控制器下,一組無人機(jī)將收斂于以目標(biāo)為圓心,半徑為d的圓周上,即當(dāng)t→∞時(shí),ρi(t)→d。
引理3.3[11]:假設(shè)目標(biāo)是靜止?fàn)顟B(tài),在式(7)估計(jì)器和式(8)控制器下,如果無向拓?fù)銰是樹結(jié)構(gòu),則一組無人機(jī)將按照指定分離角度分布在以目標(biāo)為中心的具有指定半徑的圓周上,對(duì)于i∈V,當(dāng)t→∞時(shí),滿足=2π/N。
3 穩(wěn)定性分析
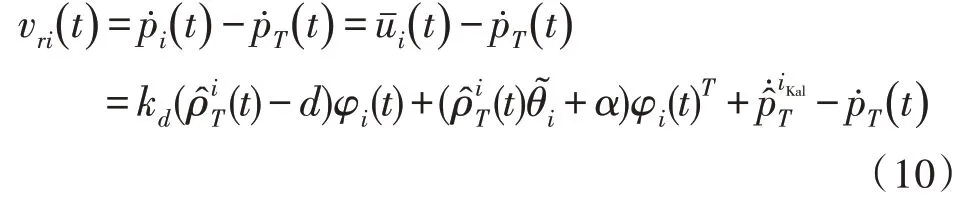
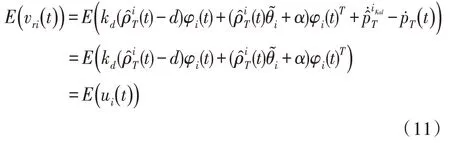
根據(jù)引理5[11],對(duì)于一個(gè)運(yùn)動(dòng)的目標(biāo),在式(7)估計(jì)器和式(8)控制器下,無人機(jī)i與目標(biāo)的相對(duì)距離的控制誤差收斂到一個(gè)半徑有限的區(qū)域,但不是收斂到零。因此,提出下列控制器:

推論1:對(duì)于運(yùn)動(dòng)目標(biāo),式(9)控制器下無人機(jī)i的環(huán)航跟蹤半徑控制誤差-d一致收斂到零。
證明:定義圖1 所示的笛卡爾坐標(biāo)系為C1,定義以目標(biāo)pT(t) 為原點(diǎn)的參考坐標(biāo)系為C2。則無人機(jī)在C2 坐標(biāo)系下的相對(duì)于目標(biāo)的運(yùn)動(dòng)速度可以描述為:
因此,原來的環(huán)航編隊(duì)控制問題可以轉(zhuǎn)化為C2坐標(biāo)系下一組無人機(jī)環(huán)航跟蹤靜止目標(biāo),根據(jù)引理3.2,一組無人機(jī)將收斂于以目標(biāo)為圓心,半徑為d的圓周上,即當(dāng)t→∞時(shí)ρi(t)→d。證畢。
推論2:對(duì)于運(yùn)動(dòng)目標(biāo),在式(9)控制器下,如果無向拓?fù)銰是樹結(jié)構(gòu),則一組無人機(jī)將按照指定分離角度分布在以目標(biāo)為中心的圓周上,對(duì)于i∈V,當(dāng)t→∞時(shí),滿足=2π/N。
證明:基于推論1 的證明,在C2 坐標(biāo)系下一組無人機(jī)環(huán)航跟蹤靜止目標(biāo)的問題,可以根據(jù)引理3.3,使得無人機(jī)之間的分離角按照2π/n分布在指定半徑的圓周上。
4 仿真驗(yàn)證
4.1 動(dòng)力學(xué)模型選擇
為了能夠得到目標(biāo)更精確的估計(jì)位置,參考文獻(xiàn)[9]在式(7)估計(jì)器引入卡爾曼濾波。首先,選擇目標(biāo)動(dòng)力學(xué)模型相關(guān)參數(shù)為:
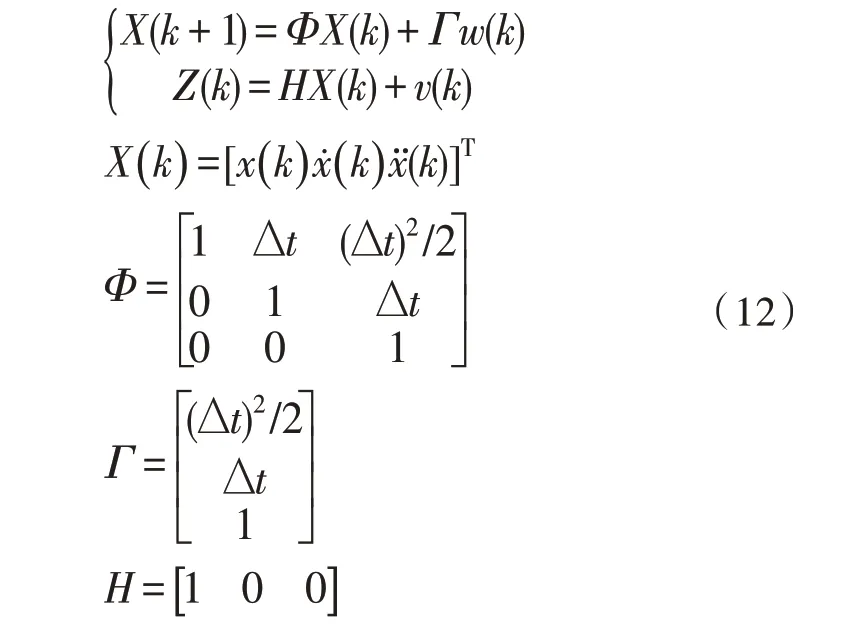
其中,采樣時(shí)間Δt=0.1 s,x、、分別是估計(jì)目標(biāo)的位置、速度以及加速度。假設(shè)模型噪聲w(k)和外界干擾v(k)是均值,且為0,方差分別為的高斯白噪聲,δ(k,l)是狄利克雷函數(shù),q=0.2,R=0.2。
4.2 低速目標(biāo)仿真對(duì)比
低速目標(biāo)以文獻(xiàn)[11]中的目標(biāo)軌跡vT(t)=[0.2,0.1(cos(0.3t)+1)]T為例,在該文引入卡爾曼濾波的式(7)估計(jì)器和式(9)控制器下,選擇參數(shù)k=5,kd=1,α=0.5 時(shí),環(huán)航半徑d=10,無人機(jī)初始位置任意,軌跡圖如圖4(a)所示,估計(jì)誤差、收斂半徑以及分離角情況如圖4(b)、(c)、(d)所示。
通過圖4 可以看出,添加濾波以及補(bǔ)償項(xiàng)的控制策略,能夠有效地使一組無人機(jī)在以目標(biāo)為中心且具有指定半徑的圓周上形成等角編隊(duì)。將該次仿真結(jié)果與相同參數(shù)條件下的文獻(xiàn)[11]中的估計(jì)控制策略進(jìn)行比較,以無人機(jī)1 的估計(jì)誤差、收斂半徑以及分離角的收斂情況為例,結(jié)果如圖5 所示。

圖4 低速目標(biāo)在濾波控制策略下的仿真結(jié)果圖
由圖5可以看出加入濾波后的估計(jì)策略收斂速度更快且能夠全局漸近收斂到指定位置,控制誤差更小。

圖5 低速目標(biāo)兩種方法結(jié)果對(duì)比圖
4.3 快速目標(biāo)仿真對(duì)比
快速目標(biāo)以文獻(xiàn)[7]中的目標(biāo)軌跡vT(t)=[1,cos(0.1t)+1)]T為例,在相同動(dòng)力學(xué)模型下,引入濾波方法。在式(7)估計(jì)器與式(9)控制器的作用下,選擇參數(shù)k=5,kd=1,α=0.5 時(shí),環(huán)航半徑d=8,無人機(jī)初始位置任意,軌跡圖如圖6(a)所示,估計(jì)誤差、收斂半徑以及分離角情況如圖6(b)、(c)、(d)所示。
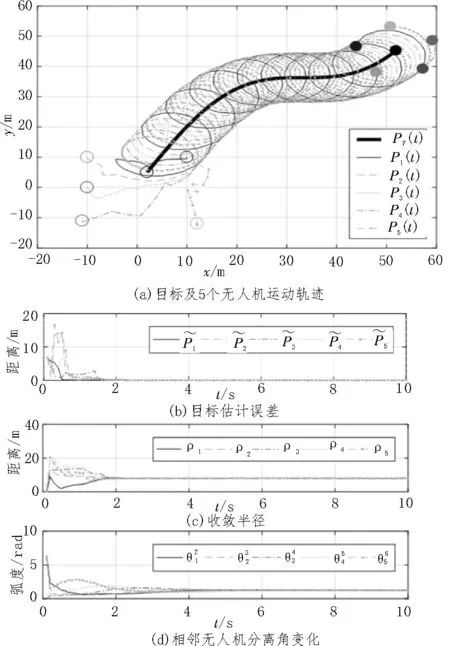
圖6 快速目標(biāo)在濾波控制策略下的仿真結(jié)果圖
通過圖6 可知,添加濾波以及補(bǔ)償項(xiàng)的控制策略針對(duì)高速目標(biāo)也有良好的跟蹤性能。通過兩組仿真結(jié)果對(duì)比可知,在目標(biāo)速度加快且估計(jì)策略相同的情況下,引入濾波的方式所得到的估計(jì)誤差顯著減小,半徑收斂誤差減小,分離角也收斂到2π/5,如圖7所示。
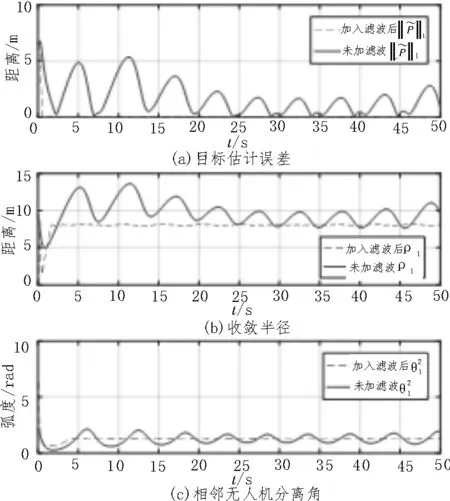
圖7 快速目標(biāo)兩種方法結(jié)果對(duì)比圖
5 結(jié)論
該文主要研究了純方位量測(cè)下多無人機(jī)協(xié)同目標(biāo)跟蹤問題,討論了一種具有無偏估計(jì)誤差的卡爾曼濾波器在多無人機(jī)協(xié)同跟蹤中的應(yīng)用,基于虛擬交叉定位算法對(duì)現(xiàn)有控制律加入估計(jì)目標(biāo)速度進(jìn)行改進(jìn),保證多無人機(jī)在目標(biāo)周圍形成以目標(biāo)為中心具有指定半徑的等角圓形編隊(duì)。與現(xiàn)有的純方位量測(cè)下多無人機(jī)協(xié)同跟蹤方法進(jìn)行了比較,仿真結(jié)果表明,不管是低速還是快速目標(biāo),所提出的算法能顯著提高目標(biāo)狀態(tài)估計(jì)的精度,并減小了控制誤差。
猜你喜歡
測(cè)控技術(shù)(2018年11期)2018-12-07 05:49:38
測(cè)控技術(shù)(2018年12期)2018-11-25 09:37:34
電測(cè)與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
中國(guó)慣性技術(shù)學(xué)報(bào)(2017年1期)2017-06-09 08:15:14
電測(cè)與儀表(2016年21期)2016-04-11 12:42:44
電源技術(shù)(2016年9期)2016-02-27 09:05:39
江蘇科技大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年4期)2015-12-17 12:42:50
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電測(cè)與儀表(2015年24期)2015-04-09 12:04:36