基于電子化移交的站線變戶數據問題智能定位研究
2022-01-06 12:33:14孔慶波楊箴
電子設計工程 2021年24期
孔慶波,楊箴
(貴州電網有限責任公司信息中心,貴州貴陽 550000)
智能電網的概念在我國得到普及,大型數字化變電站投入運行,其系統標準采用IEC61850 標準[1]。在我國,數字化變電站建設是國家政策的重點工程,在國家的大力支持下,其發展方向已向縱深方向轉變。目前,國內外已有100 多座數字化變電站建成投產。第一、二批智能變電站項目已獲國家電網公司批準。然而,智能變電站的建設還存在許多問題[2-6]。
為了解決站線變戶數據的不統一和非共享問題,文獻[7]提出智能變電站故障信息模型與繼電保護在線監測方法,充分利用智能變電站信息開放與信息共享的優勢,描述繼電保護狀態信息間的耦合及關聯關系,實現繼電保護關鍵狀態的辨識。文獻[8]提出基于聯合特征的變電站設備圖像識別方法,通過監測變電站判斷故障定位和利用圖像識別故障位置,對變電站設備圖像進行分類識別,把圖像的sift特征與圖像的稀疏表示特征相結合組成聯合特征,提高變電站設備圖像分類識別的準確率。
但上述方法存在加載模型數量較多,加載時間較長、檢測率波動幅度較大且定位效率低的問題,由此,該文提出基于電子化移交的站線變戶數據問題智能定位方法,其創新之處在于通過引入BIM(Building Information Modeling)概念將數字化信息模型的概念運用在設備后期的運行管理中,提高故障定位的效率。
1 IFC變電站信息模型的建立
1.1 初始信息模型的建立
該文在調研了大量BIM 建模軟件的基礎上選用Autodesk Revit 產品,該產品在支持導出IFC2×3 標準的同時,其“族庫類別”一一對應IFC 的“實體類型”。創建初始信息模型時Autodesk Revit 產品的族庫類別不能自行定義[9-11],內部輸變電相關類別僅包含少數幾個類別,無法對變電站內多數一、二次電氣設備進行準確表達,也無法導入至IFC 對應實體類型內。
針對這一情況,對輸變電的編碼體系進行編制,得到統一的編碼體系。以變壓器的編碼體系為例,其結構如圖1 所示。

圖1 變壓器編碼體系結構
1.2 變電站數字化移交可行性
目前的IFC 數據標準主要針對一般性的設施設備對象進行描述,在描述電力行業獨有的設施設備和其屬性時的缺陷較多[12-13]。變電站數字化移交的流程如圖2 所示。

圖2 數字化移交流程
1.3 站線變戶數據問題智能定位
1.3.1 定位原理
站線變戶數據問題智能定位的原理如圖3所示。

圖3 站線變戶數據問題智能定位原理圖
由圖3 可知,一次設備所包含的計算機監控系統、狀態監測系統以及智能輔助控制系統收集到的全部實時監測數據都通過數據轉換接口轉變為數據庫可讀取格式,并輸送至數據庫,利用動態調度方法對其進行整理、分析后,可將其解析得到IFC 標準框架,其與三維IFC 模型屬性相對應。并且基于工作人員的操作需要可在主機的顯示平臺上顯示并動態更新所需實時數據,實現站線變戶數據問題的智能定位[14-15]。
1.3.2 動態調度方法
利用依據聚合度函數的聚合算法提升IFC 模型的加載速度,并通過IFC 模型數據組織方法對IFC 模型進行快速調度。以集群聚合算法為基礎設計一個多叉樹混合索引結構,對IFC 模型數據進行組織,實現場景可視化[16]。
設葉子節點為三維場景中變電站輸變電的具體IFC 模型,按照聚合度函數聚合集群分割后的子集,二叉樹從下往上生成,聚合全部IFC 模型后停止操作。初始IFC 模型的集合是:

按照聚合度值合并1、2 為d,集合轉變得到{d,3,4,5},然后按照聚合度值合并4、5 為b,集合轉變得到{d,3,b},再依據所得最小聚合度值,合并d、3 為c,集合轉變得到{c,b},最后合并c、b,得到最終聚合后的IFC 模型集合為:

所有IFC 集群分割的子集均由二叉樹結構索引對其IFC 模型數據進行組織,設分割了N個集群,則可得到IFC 模型子集的N棵二叉樹,利用一個節點索引將N棵二叉樹根節點轉變為多叉樹混合結構。利用多叉樹混合結構對IFC 模型進行組織的過程如圖4所示[17-18]。
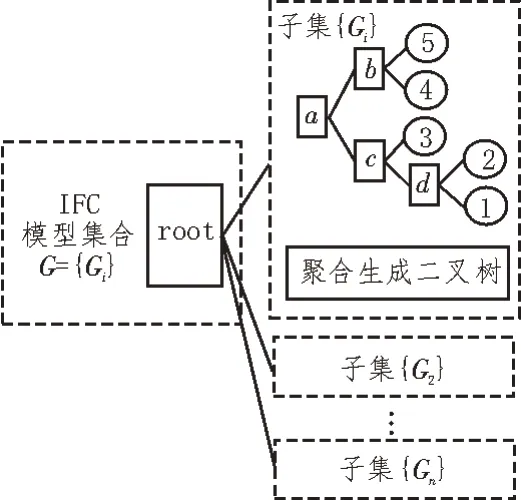
圖4 多叉樹混合索引結構組織IFC模型的過程
2 實驗分析
將該文方法投入某省級變電站試運行3 個月,統計該過程中的變電站站線變戶數據變化情況。為驗證該文方法的優劣,以智能變電站故障信息模型與繼電保護在線監測方法(文獻[7]方法)、基于聯合特征的變電站設備圖像識別方法(文獻[8]方法)為對比方法,統計3 種方法加載變電站站線變戶數據的加載速率,結果如圖5 所示。

圖5 變電站站線變戶數據加載速率對比結果
分析圖5 可知,應用文獻[7]方法的變電站站線變戶數據的加載速率基本保持在300 kB/s 左右,應用文獻[8]方法的變電站站線變戶數據的加載速率基本保持在200 kB/s 左右,應用該文方法的變電站站線變戶數據的加載速率基本保持在400 kB/s 左右,應用該文方法的變電站站線變戶數據的加載速率總體上高于應用文獻[7]方法和文獻[8]方法,該文方法可顯著提升變電站站線變戶數據加載速度。
通過Chrome Dev tools 記錄應用3 種方法實現電子化移交過程中的由全局場景緩慢跟進視點,最終抵達原始場景全過程內5 個視點下所需模型加載數量與加載時間。其中,全局場景加載時間是啟動三維場景時整個全局場景加載需要的時間。3種方法的三維場景加載數量與加載時間對比結果如圖6所示。

圖6 變電站三維場景模型加載數量和加載時間
通過圖6 分析可知,應用其他兩種方法實現的三維場景需要的加載模型數量較多,加載時間較慢,應用該文方法實現的三維場景需要的加載數量少且加載時間快,證明應用該文方法可以有效提高三維變電場景的加載速度,降低電子化移交過程中所需模型數量。
選取該變電站的站線變戶數據作為訓練樣本,統計訓練樣本總數分別為800、1 600、2 400、3 200、4 000 時,3 種方法對站線變戶數據不統一問題的定位準確率,結果如圖7 所示。

圖7 站線變戶數據不統一問題的定位準確率變化曲線
由圖7 可知,該文方法的站線變戶數據不統一問題的定位準確率與訓練集樣本數呈正相關關系,其跟隨訓練集樣本數的增長呈平穩上升趨勢,至2 400 訓練集樣本數時站線變戶數據不統一問題的定位準確率高達95%。雖然文獻[7]方法和文獻[8]方法在800 訓練集樣本數時的站線變戶數據不統一問題的定位準確率均高于該文方法,但二者的準確率波動幅度較大,且后續持續低于該文方法,證明該文方法的站線變戶數據不統一問題的定位效果最好。
對3 種方法跟隨訓練集樣本數產生變化的站線變戶數據不統一問題的定位錯誤率進行實驗,結果如圖8 所示。
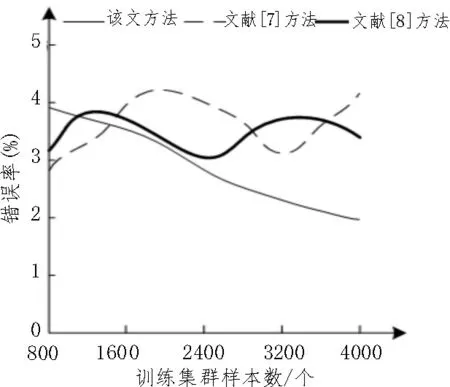
圖8 站線變戶數據不統一問題的定位錯誤率變化曲線
通過圖8 可知,該文方法的站線變戶數據不統一問題的定位錯誤率與訓練集樣本數呈負相關關系,其跟隨訓練集樣本數的增加呈下降趨勢,站線變戶數據不統一問題的定位錯誤率在4%以下,低于其他兩種方法的站線變戶數據不統一問題的定位錯誤率,證明該文方法的故障定位準確性高,可有效確保變電站穩定運行。
由于變電站實際運行中負荷處的各節點不斷變動,為驗證該文方法在負荷變動中的魯棒性,隨機選取7 條線路,對3 種方法在負荷波動為小負荷、+20%、-20%、+30%、-30%下的站線變戶數據非共享性問題的定位性能進行驗證,結果如圖9 所示。

圖9 負荷變動對站線變戶數據非共享問題的定位誤差的影響
分析圖9 可知,站線變戶數據非共享問題的定位誤差受負荷波動影響,會隨其波動范圍的擴大而增加,3 個方法中該文方法波動幅度最小,其最大站線變戶數據非共享問題的定位誤差是負荷波動至+30%時的0.3%,遠低于其他兩種方法,表明該文方法在負荷變化中的魯棒性最好。
3 結論
文中研究了基于電子化移交的站線變戶數據問題智能定位技術,通過擴展IFC 標準構建了一個應用動態調度方法的變電站數字化信息模型,在具有強大的數據處理能力的同時實現了站線變戶數據問題的智能定位,能夠有效提升變電站站線變戶數據的加載速度,為未來變電站工程數字化移交中的三維場景交互可視化提供了有利支撐。
猜你喜歡
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
河南電力(2015年5期)2015-06-08 06:01:45