免像控無人機攝影測量開采沉陷監測方法研究
2022-01-07 09:17:34廉旭剛劉曉宇員鴻燕3
金屬礦山 2021年12期
關鍵詞:全站儀
廉旭剛 王 站 劉曉宇 員鴻燕3
(1.太原理工大學礦業工程學院,山西 太原 030024;2.山西冶金巖土工程勘察有限公司第一分公司,山西 臨汾 041000;3.山西工程科技職業大學交通工程學院,山西 晉中 030619)
礦區開采沉陷區變形及生態環境監測數據是礦山生態修復治理的重要依據[1]。采用水準儀、全站儀、GNSS等傳統開采沉陷監測手段費時費力,且單點監測方式適用性不強;InSAR監測雖然具有監測覆蓋大、精度高等優點,但其沉降監測梯度有限[2]。隨著無人機技術及其搭載傳感器的不斷成熟,因其靈活性、效率高、高時空分辨率、低成本、操作方便等優勢[3-4],使得在礦區、農業、林業監測等領域得到了應用,并取得了顯著成效[5-6]。近年來,在生態修復方面,一些學者采用無人機遙感技術開展了采煤沉陷區的耕地及積水區范圍提取[7-8]、耕地質量評價[9]、農作物生長狀態評估[10-11]、植被分類[12]等研究;在采動地面災害監測方面,無人機低空遙感手段被用于采動滑坡、崩落、地裂縫[13-14]、塌陷坑[15]及災害預測[16]研究。
針對傳統開采沉陷監測方法的不足,近年來研究人員采用無人機搭載激光雷達和高分辨率相機進行礦區地面沉降監測,并且取得了一定成效。無人機在礦區的應用雖然處于起步階段,但在速度、規模和服務范圍方面發展迅速[17],ESPOSITO等[18]、?WIAKALA 等[19]、葛林林等[20]、高冠杰等[21]、周大偉等[22]采用無人機攝影測量技術對煤礦開采地表沉陷進行了監測,取得了一定成效;湯伏全等[23]、張永庭等[24]基于無人機LiDAR技術對榆神礦區采煤沉陷建模方法進行了改進。本研究在上述成果的基礎上,以山西某礦區為例,采用免像控無人機攝影測量技術進行開采沉陷監測,進一步提高該方法的自動化程度。
1 研究區概況
研究區位于太行山北段西側劉備山的南麓低中山區。地表地形復雜,溝谷縱橫,屬大陸性半干旱氣候,降雨主要集中在7—9 3個月,占全年總降水量的71%~91%。如圖1所示,相向開采的工作面A開采15#煤層,采深400~545 m,采厚6.5 m,長度1 200 m,寬度200 m,推進速度3.3 m/d;工作面B開采8#煤層,采深336~506 m,采厚2.9 m,長度1 190 m,寬度220 m,推進速度5.2 m/d。兩工作面水平方向距離32 m,垂直間距平均51 m,均采用長壁式一次采全高采煤方法,頂板全部垮落。上覆巖層以泥巖、砂質泥巖為主,砂巖厚度為30~45 m,黃土層厚度5~10 m。本研究在圖1中布設了a、b、c3條觀測線驗證無人機攝影測量方法的精度。
2 無人機攝影測量數據采集及處理
2.1 數據采集
數據采集使用某型號無人機航測系統,搭載索尼A6000相機,有效像素2 430萬,航向和旁向重疊分別為80%和60%,采用仿地飛行,飛行速度14 m/s,地面像素分辨率為4 cm。在2019年9月、2019年11月、2020年1月、2020年5月、2020年9月進行了5次數據采集,共采集全彩色照片3 400幅。地表觀測線a、b、c的測點間距為30 m,采用全站儀進行了4次(對應于無人機前4次采集時間)沉降觀測。
2.2 數據處理
數據處理流程見圖2,采用實時動態載波相位差分技術(RTK)融合GNSS動態后處理差分技術(PPK)輔助空三解算,提高空三加密的精度,以實現免像控的目的。盡管RTK可以實現高精度的單點定位,但對于快速飛行的無人機而言易造成衛星失鎖現象,融合PPK技術可以通過反向卡爾曼濾波,解決失鎖時間段內的歷元數據,從而提高固定速率和定位精度。
采用無人機攝影測量技術進行地表沉降監測的關鍵是獲取高精度數字高程模型(DEM),而實際的地表存在建筑物及植被等非地面點,即為數字表面模型(DSM)。從DSM到DEM需要進行點云濾波,點云濾波的原始數據即為該區域的多視影像密集匹配點云。使用Terrascan軟件中的自動濾波工具獲得初始濾波結果,并通過手動分類工具對初始結果進行改進,以保證DEM質量。通過可視化點云的橫截面手工檢測相應的點云,并糾正錯誤分類的點。研究區域局部的點云濾波前后效果對比如圖3所示。
3 開采沉陷結果分析
3.1 動態沉陷盆地及其精度分析
選取一期點云數據濾波后進行插值算法對比試驗,分別使用克里金插值、反距離權重插值、自然鄰點插值和線性插值4種方法繪制了等值線圖,如圖4所示。可見,自然鄰點插值和線性插值在圖像邊界處對于地形表達的真實性不及克里金插值法和反距離權重插值法。

為了進一步驗證各種插值方法的精度,在實地使用RTK采集檢查點的三維坐標,以此高程數據作為測量的真值與利用平面坐標查找的等值線插值高程進行比較,進而計算精度[25-27]。通過插值比較得出,利用不同插值方法得出的高程不同,其中克里金插值和反距離權重插值的高程較接近實際觀測值,可以確定這兩種插值方法的數據比較可靠。但在復雜地區且無人機影像匹配密集點云數據量較大的情況下,克里金插值計算量較大,較為耗時。綜上分析,本研究采用反距離權重插值法。
對點云濾波之后得到的地面點云統一進行反距離加權插值處理得到各期DEM,將2019年9月首次無人機觀測獲得的DEM分別減去2019年11月、2020年1月、2020年5月和2020年9月觀測獲得的DEM,得到如圖5所示的工作面開采引起的地表下沉盆地的動態發展情況,結果分別對應于圖5(a)、圖5(b)、圖5(c)和圖5(d)。在監測時段內,兩個工作面及附近地表均有不同程度的沉降,隨著工作面的推進,A-15#和B-8#工作面地表最大下沉值逐漸增大,下沉盆地范圍不斷擴大。B-8#和A-15#兩個工作面沉陷區域分別向南和北方向延伸,與工作面開采方向一致。由圖 5(c)到圖 5(d)的過程中,在A-15#工作面中心最大下沉值和整體沉陷盆地范圍變化不明顯。
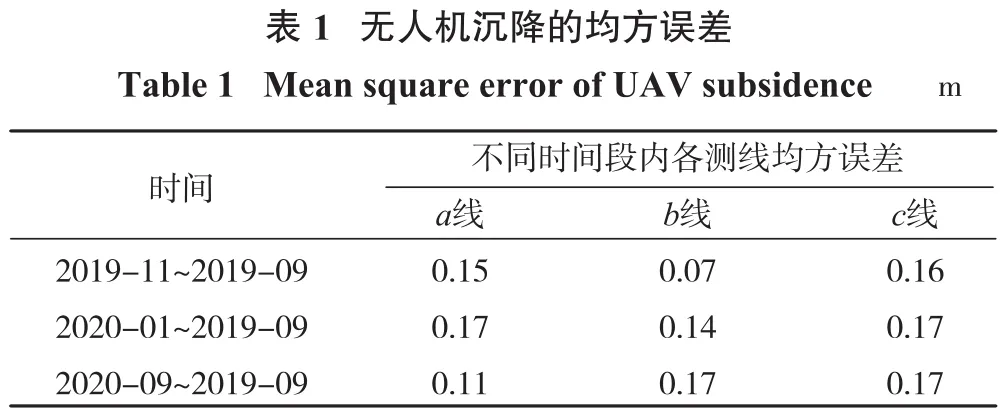
本研究通過無人機相應時間段DEM的高程減去兩個時段相應點的全站儀高程,計算無人機沉降盆地數據的均方誤差(M),公式為


式中,n為用于對比的點數,個;Δ為DEM與全站儀沉陷值的差值,m。
計算結果表明:沉降值的最大均方誤差為0.17 m,最小均方誤差為0.07 m,平均均方誤差為0.15 m(表1)。
不同時間段內全站儀與無人機獲取的下沉曲線對比見圖6,其中不連續部分是由于部分監測點遭受破壞而未獲得全站儀觀測數據所致。
由圖6可知:圖6(b2)、圖6(b3)、圖6(c3)中左側的矩形下沉量較小的區域,無人機數據跳點較多,與全站儀實測數據偏差較大,在圖6(b2)、圖6(b3)、圖6(c2)、圖6(c3)中右側虛線矩形區域中最大下沉值附近偏差減小,兩條曲線趨勢也較為接近。傾向b線和c線下沉值與下沉范圍隨著工作面的推進下沉幅度逐步增大,呈現兩側平緩、邊緣較陡、底部較狹窄的“V”型曲線,走向a線由于對稱布設半條,未能全部顯示工作面的下沉曲線發展情況。
3.2 誤差來源及分析
統一點云濾波算法和插值算法所構建的無人機沉陷DEM仍然存在明顯誤差,綜合圖5和圖6可知,無人機沉陷監測中DEM誤差主要來源于以下幾方面:
(1)無人機容易受到一些內部或外部因素的影響。儀器傳感器量化過程中帶來的系統誤差以及天氣狀況對飛行器姿態和成像質量的影響產生的誤差會影響無人機數據質量。因此每次無人機采集數據前都需要考慮天氣情況,選擇空氣潔凈、光照充足的時間段,選用成像質量好的相機進行航攝,數據后處理解算差分POS數據提高定位精度。
(2)濾波算法未去除的非地面點引起的模型誤差。點云濾波算法的局限性導致非地面點不能完全去除,以及數據采集覆蓋不同的季節,研究區植物的生長狀況會有差異,植被茂密時會降低所獲取DEM的精度。可通過多項式擬合或鄰域平均等方法減少噪聲來降低該類誤差,也可以選取冬季或春季采集數據,盡量減小植被對無人機數據精度的影響。
(3)采用點云內插算法生成格網DEM引起的模型誤差。點云內插會造成精度損失,尤其是在地形變化復雜和點云密度較低的地區,可通過改進點云插值算法或幾種插值算法優選減小這類誤差。
(4)影像分辨率的限制。影像分辨率越高,影像密集匹配和空中三角測量過程中精度就會越高。但是要求無人機降低飛行高度、減小飛行速度及設置更小的地面采用距離,會導致總體航攝效率會下降,增加無人機飛行的安全風險,可通過適度提高影像地面分辨率來解決。
3.3 主斷面沉降特征分析
為了更直觀地反映本研究沉陷DEM監測情況,基于2019-11—2019-09、2020-01—2019.09和2020-05—2019-09 3期沉陷DEM提取A-15#和B-8#兩個工作面走向主斷面下沉剖面數據,對3期數據進行Savitzky-Golay平滑去噪[28]。該濾波器是一個基于多項式擬合方法的低通濾波器,相對于低頻信號變化 緩慢,波形平滑,相對于高頻信號變化非常快,波形有突變。無人機數據中存在因飛行過程中姿態不穩引起的高程跳點較多的情況,因此Savitzky-Golay平滑適合于剔除無人機數據中的高程突變噪聲。


?
該方法對于提取的無人機數據有較好的平滑效果,盡可能保留了沉陷盆地底部有效的沉陷信息。Savitzky-Golay平滑濾波的效果隨著選取窗口寬度的不同而不同,可以滿足多種不同場合的需求[25]。

無人機沉陷DEM兩個工作面走向下沉主斷面的下沉曲線如圖7所示。剖面路徑起點位置和目標位置確定,方向均由北到南,圖中最大下沉值分別向靠近原點和遠離原點方向偏移,這與兩個工作面的開采方向一致。圖7(a)中2020-05—2019-09曲線最大下沉值為2 912 mm,實測最大值為2 892 mm,誤差為20 mm,占實測走向最大下沉值的0.69%。總體來看,采用無人機監測礦區沉陷能夠較為全面地反映出礦區沉陷影響范圍,最大下沉值的監測精度較高。
4 結論
(1)本研究提出了一種基于免像控無人機攝影測量的礦區沉陷監測方法,闡述了無人機攝影測量礦區監測作業的實際工作流程,構建了基于差分DEM的動態沉陷盆地模型,并驗證了無人機沉陷監測的精度,討論了隨著工作面推進沉陷盆地發展情況和盆地主斷面下沉規律。
(2)免像控無人機攝影測量技術為在礦區受到地形限制或人員難以進入的區域提供了一種安全、可靠、靈活的地表沉陷監測方法;無人機攝影測量產品精度受到數據集質量、研究區域特征、飛行參數設置、濾波插值過程引入的模型誤差以及使用的處理工具等因素影響。
(3)未來需對無人機多時相數據的可重復性進行更全面地評估。根據不同的表面類型進行多重誤差評估以產生更真實的地形變化的空間表示。

猜你喜歡
經緯天地(2021年5期)2021-12-27 02:31:46
北京測繪(2020年12期)2020-12-29 01:37:18
礦產勘查(2020年1期)2020-12-28 00:21:36
水電站設計(2020年4期)2020-07-16 08:23:48
工程與建設(2019年3期)2019-10-10 01:40:18
鐵道標準設計(2018年12期)2018-11-22 12:26:38
電測與儀表(2016年9期)2016-04-12 00:29:52
鐵道勘察(2015年2期)2015-03-16 11:34:43
吉林地質(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08
