基于SLAM算法的雙柔性桿機器人遲滯補償方法
2022-01-10 03:04:22宋婷婷
遼寧大學學報(自然科學版) 2021年4期
宋婷婷
(福州理工學院,福建 福州350506)
0 引言
在智能化逐漸加深的今天,機器人代替人工已經成為諸多行業的普遍現狀[1].與人工生產相比,機器人生產具有減少管理任務,提高產品質量穩定性,問題溯源更加便捷的特點,但與此同時,使用機器人對產品進行加工生產的基礎是對機器人的高精度控制,并且確保機器人能夠準確執行輸入的命令[2].因此,近些年來,關于機器人的研究逐漸成為相關學者研究的熱點.研究的內容也逐漸從對功能的探索轉向對運行效果的精細化研究[3].其中,一項極為重要的內容就是機器人對操作命令的遲滯問題,特別是對雙操作桿的機器人而言,遲滯問題是影響其最終操作效果的關鍵因素[4].由于機器人在接收到操作端輸入的信息后,需要對其進行解碼辨識[5],當轉化為實際的輸出動作,出現遲滯后,會導致兩個操作桿出現操作時延異常的情況,使二者之間的配合產生時間差,導致操作結果與輸入結果不一致,影響最終產品的質量[6].遲滯問題已有學者作出相關研究,其中文獻[7]提出對遲滯特征的非線性分析,并提出對應的補償方法,該方法實現了降低遲滯的目的,但遲滯仍然存在;文獻[8]提出基于Duhem前饋的遲滯逆補償方法,實現了對遲滯問題的有效解決,但其需要對設備運行前期的遲滯信息進行采集,因此,存在固定時段的無效操作,對資源造成浪費,成本較高.因此,繼續加強對遲滯問題的研究是十分必要的.
基于此,實驗提出基于SLAM算法的雙柔性桿機器人遲滯補償方法.在分析引起遲滯原因的基礎上,通過SLAM算法計算遲滯大小,以此進行有針對性的定量補償,并通過試驗驗證了所提方法的有效性,為機器人的控制和高質量利用提供有價值的參考.
1 基于SLAM算法的機器人遲滯分析
為了實現對雙柔性桿機器人的遲滯進行準確補償,首先要明確機器人遲滯的變化情況[9],以此為基礎,有針對性地對其進行補償.因此,實驗采用SLAM算法對機器人的遲滯非線性屬性進行分析.
1.1 構建雙柔性桿機器人運動軌跡模型
在雙柔性桿機器人的運行空間內,其運動軌跡與動作都是通過執行控制端輸入指令實現的[10].機器人在已知地圖的環境中運行時,機器人可以通過觀測位置已知的特征標志對里程計的誤差進行補償,每一次觀測使機器人的位置誤差趨向于觀測誤差與特征標志的位置誤差之和.因此在命令輸出過程中,對于機器人運行范圍內的空間環境進行分析,是有效降低和避免機器人運動出現異常的基礎[11].首先,采用SLAM算法對機器人的運動軌跡進行建模[12].
在運動空間,機器人在極線運動狀態下的極線運動軌跡可以表示為
(1)
(2)
以此為基礎,采用SLAM算法對機器人運行軌跡進行建模.將機器人運動過程中經過的位置作為SLAM算法的算子,則在t+1時刻,機器人所在運行軌跡的極線線性方程中,對應的向量分別為(ai,bi,ci),那么在t至t+1時間內,SLAM算子組成的位置方程可以表示為
l=aixi+biyi+ci
(3)
由此可得,在整個運動過程中,SLAM算子的集合即為機器人的運動軌跡,那么其運動軌跡模型可以表示為
(4)
1.2 遲滯分析
通過SLAM算子計算出了機器人運行軌跡的模型,在模型中,對機器人出現的遲滯進行分析,并將分析結果作為遲滯補償的依據[13].
根據上述模型可以得出,在t至t+1時間內,機器人運行的距離可表示為
(5)
在該距離內,將SLAM算子的位置信息進行劃分[14].首先定義一個總遲滯函數,通過將SLAM算子進行下降處理[15],以引起遲滯的運動軌跡邊界類型為基礎,計算機器人在d距離內運動的遲滯.
根據兩個相鄰SLAM算子的參數關系,可以將引起遲滯的邊界可分為遮擋、鉸鏈、共軌跡三部分[16],假設三者對應的懲罰系數分別為Hz、Hj、Hg,以此為基礎,得到遲滯函數為
(6)
由此可以得出在不同邊界條件下,機器人在運行過程中產生的遲滯,根據該結果,對其進行有針對性的遲滯補償.
2 機器人遲滯補償
在得出雙柔性桿機器人運動狀態下的遲滯后,對其進行遲滯補償.實驗采用AP(Adaptive Projection,自適應投影)的方式,在基于SLAM算法構建的機器人運動軌跡模型中對遲滯補償量進行計算,并將計算結果以增益的方式實現對機器人的遲滯補償.
首先,采用AP算法對SLAM算子在遲滯中的權重進行計算,其可表示為
(7)
其中,ω(t)表示在t時刻的SLAM算子的權重,λ表示自適應數,κ表示增益系數,其可根據機器人的實際運行情況進行調整,調整范圍為[0,1),e(*)表示t時刻,機器人運動出現的遲滯.
在機器人完成系統輸入指令的過程中,由于其運動軌跡是非線性的,因此增益系數也是時刻變化的.當機器人產生的遲滯明顯時,需要適當減小增益系數,以此避免出現遲滯補償過量.
在對增益進行調節時,以SLAM算子的實際位置信息與模型中位置信息之間的差異作為判斷依據的,并在二者之間建立了線性相關關系.其可表示為
κ=ke(t)
(8)
其中,k表示相關系數,其與機器人的控制系統相關.同樣地,當增益系數為最大值,遲滯補償的作用仍無法實現對機器人運動軌跡控制的目標時,以最大值作為增益輸出值;當增益系數為最小值,遲滯補償仍超出對機器人運動軌跡控制所需強度時,以最小值作為增益輸出值.
通過這樣的方式,在模型中實現對增益取值結果合理性驗證,由于機器人的運行是動態的,因此在增益作用下,當SLAM算子的位置信息與模型一致時,則認為該增益可以實現雙柔性桿機器人遲滯補償,此時機器人完成指令任務的時延也為最小值;若在增益作用下,SLAM算子的位置信息與模型存在差異,則表明遲滯出現了相對變化,此時需要對增益值進行調整,通過自適應投影的方式計算出新的增益值,重新進行驗證,直至滿足要求.
3 試驗測試
為了測試提出的機器人遲滯補償方法的實際應用效果,文章進行了試驗測試,同時,為了使測試結果具有更高的可靠性,分別采用文獻[7]和文獻[8]提出的補償方法同時進行試驗,通過對比不同補償方法下機器人的運行情況,對提出方法的有效性進行客觀評價.
3.1 測試環境
試驗選用某汽車配件制造廠的雙柔性桿機器人作為試驗對象,其操作精度為0.1 mm,機械臂的最高移動速度為1.2 m/s,運行范圍為3 m×2 m×5 m.工作過程中,雙臂同時進行操作,其編號分別為1、2.機械臂由同一臺主機控制,操作系統為Windows 8,運行內存為4G.在試驗過程中,分別設計了10個不同的操作動作,對應編號為1—10,每個編號指令均測試10次,取平均值.通過不同的遲滯補償方法,對機器人的動作執行進行控制,并觀察不同方法下機器人的運動情況.
3.2 測試結果
在上述試驗環境下,分別采用3種方法對其進行遲滯補償,并對比不同補償方式下機器人的運行情況,圖1分別對比了機器人雙臂運動時延的差異情況.
圖1 不同補償方法下機器人雙臂的時延差異
從圖1中可以看出,在3種補償方法中,文獻[7]方法下機器人雙臂的最小時延差異為0,最大時延差異為0.02 ms,文獻[8]方法下機器人雙臂的最小時延差異同樣為0,最大時延差異為0.04 ms,而采用本方法的機器人雙臂時延差異為0的概率為70%,其余時延也僅為0.01 ms,表明SLAM算法的遲滯補償方法可以有效提高機器人雙臂執行指令的同步程度,為加工質量提供保障.這主要是因為該方法降低了機器人運行過程中的遲滯,減少了由此帶來的時間開銷,縮短了完成指令動作的時延.
在此基礎上,對機器人雙臂的運動精度進行比較,表1為不同補償方法下機器人雙臂的運動誤差情況.
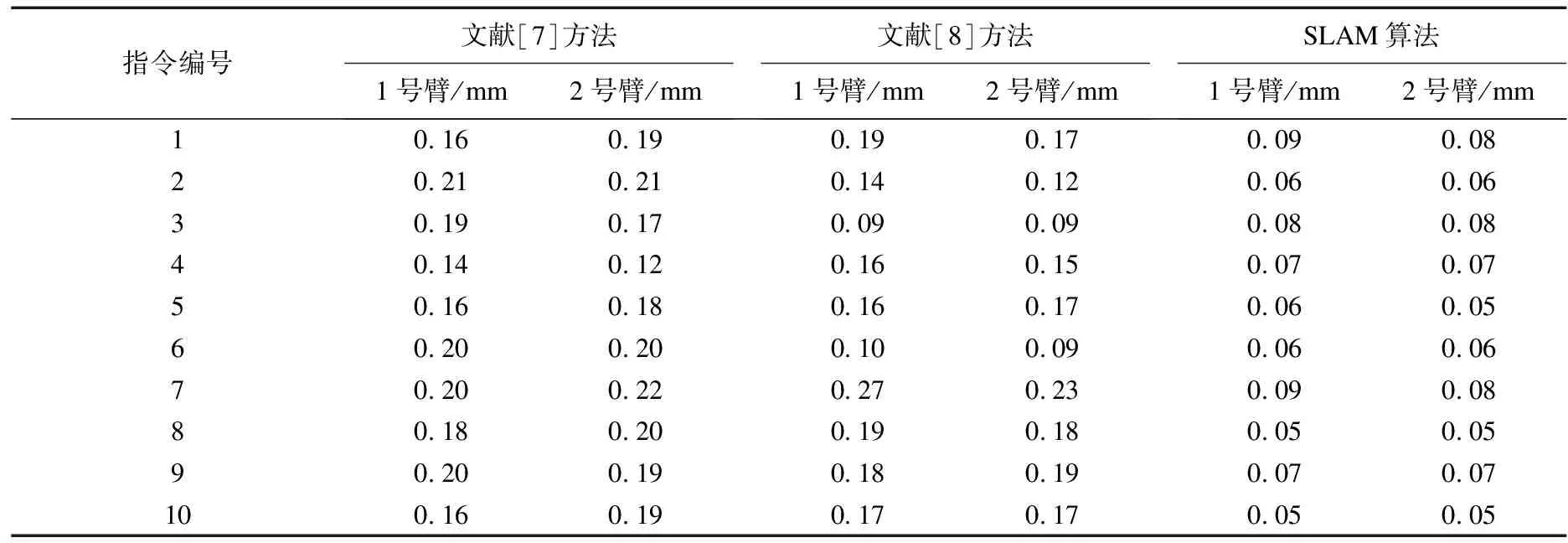
表1 不同補償方法下機器人雙臂的運動誤差
從表1中可以看出,在3種遲滯補償方法中,文獻[7]方法下機器人雙臂的運動誤差基本穩定在0.1~0.2 mm范圍內,文獻[8]方法的時延變化范圍較大,最高值可達到0.27 ms,但最小誤差低至0.09 mm,穩定性較低,而SLAM算法的誤差始終穩定在0.1 mm以內,且最小值僅為0.05 mm,表明該方法可以有效實現對機器人遲滯的補償,降低其對接收到指令的執行精度.主要是因為SLAM算法實現了對遲滯的準確計算,提高了遲滯補償的目標精度,使補償結果更加精準,以此提高了機器人運行的精度.
在上述基礎上,文章對3種補償方法下,機器人執行指令的結果與指令的一致性進行對比,其結果如圖2所示.從圖2中可以看出,在3種補償方法中,文獻[7]方法的指令完成率基本在96%~98%之間,波動范圍相對較小,但執行結果存在一定的提升空間;文獻[8]方法的完成率波動幅度較大,最高可達99.26%,但最低僅為95.17%,對產品質量的影響較為明顯,這也和機器人雙臂的時延差異較大有一定關系;而SLAM算法的完成率始終在99%以上,具有較高的執行率,可實現對指令的高精度執行,因此,產品質量也可以實現有效保障.這主要是因為SLAM算法實現了對機器人遲滯的有效補償,通過在模型中對補償結果進行驗證,避免了由于機器人的動態變化引起的補償效果不理想的問題,以此提高了機器人運行的精度,使其能夠更加準確地執行接收到的指令信息.
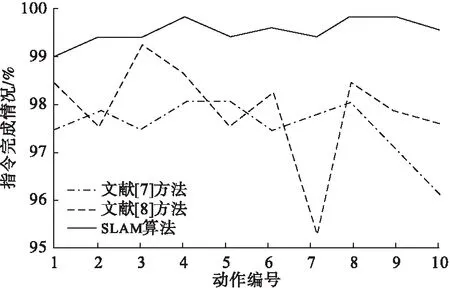
圖2 不同補償方法下機器人的指令完成情況
4 結束語
隨著現代技術的不斷發展,工業領域的智能化程度也不斷加深,機器人取代人工已經成為主流趨勢.與此同時,提高機器人的應用性能是確保生產各個環節穩定運行的基礎,也是產品質量的重要的保障.文章提出基于SLAM算法的雙柔性桿機器人遲滯補償方法,通過對引起機器人遲滯的問題進行分析,有針對性地進行補充,實現了降低機器人運行時延,提高反應速率的目的,并在一定程度上降低了由于輸入端與反饋端時間差引起的產品質量問題,對于機器人的控制以及企業的實際生產都具有十分重要的現實意義.通過該研究,可以為機器人領域的研究提供有價值的參考.
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
兒童故事畫報(2019年5期)2019-05-26 14:26:14
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
西安航空學院學報(2014年5期)2014-07-13 01:27:52