簡統(tǒng)化接觸網(wǎng)腕臂結(jié)構(gòu)動力學(xué)特性分析
2022-01-10 10:03:38羅健,張琦
電氣化鐵道 2021年6期
羅 健,張 琦
0 引言
隨著列車速度不斷提升,受電弓通過時接觸網(wǎng)腕臂結(jié)構(gòu)(腕臂和定位裝置)受到的沖擊和產(chǎn)生的振動愈發(fā)嚴重。腕臂和定位裝置的性能不僅影響列車的運行安全,還影響弓網(wǎng)受流質(zhì)量[1~3]。目前,國內(nèi)外許多研究者將腕臂結(jié)構(gòu)簡化為鐵木辛柯梁[4]或管單元[5,6],分析了多種腕臂結(jié)構(gòu)在多種載荷作用下的位移、應(yīng)力分布特性,或建立腕臂結(jié)構(gòu)的參數(shù)化模型,研究腕臂結(jié)構(gòu)的靜力學(xué)和動力學(xué)特性。但目前的力學(xué)分析主要在靜力學(xué)校核方面,研究工況多為靜止狀態(tài),或穩(wěn)定載荷情況,忽視了弓網(wǎng)接觸過程的動力學(xué)響應(yīng),且少有采用三維實體模型對腕臂結(jié)構(gòu)進行仿真計算。
本文以高速鐵路傳統(tǒng)鋁合金腕臂結(jié)構(gòu)和簡統(tǒng)化腕臂結(jié)構(gòu)為研究對象,利用有限元計算軟件開展腕臂結(jié)構(gòu)動力學(xué)分析,主要包括模態(tài)分析、諧響應(yīng) 分析和瞬態(tài)動力學(xué)分析[7~10]。通過對比兩種腕臂結(jié)構(gòu)的動力學(xué)特性,驗證簡統(tǒng)化腕臂結(jié)構(gòu)的優(yōu)越性,為簡統(tǒng)化腕臂的實際應(yīng)用提供理論支持。
1 簡統(tǒng)化腕臂結(jié)構(gòu)設(shè)計和建模
傳統(tǒng)鋁合金腕臂結(jié)構(gòu)零件多、緊固件多,且形式多樣,不便于制造、施工及運營維護。新時代高速鐵路發(fā)展對接觸網(wǎng)性能要求不斷提高,以簡統(tǒng)化為核心理念,設(shè)計了一種結(jié)構(gòu)簡化、零件集成的高服役性能接觸網(wǎng)腕臂和定位裝置。該裝置采用“弓形非限位定位器+剛性固定定位管”取代“直形限位定位器+柔性懸吊定位管/剛性固定定位管”;采用組合承力索座、組合定位環(huán)等零件,大幅減少零件數(shù)量;采用鍛造工藝取代鑄造工藝,提高了零件的抗拉強度和韌性[4,11~13]。
在ABAQUS有限元計算軟件中建立傳統(tǒng)腕臂結(jié)構(gòu)和簡統(tǒng)化腕臂結(jié)構(gòu)的有限元模型,將簡統(tǒng)化腕臂結(jié)構(gòu)模型劃分為76 168個單元,96 072個節(jié)點。材料屬性按照6082鋁合金進行設(shè)置,其彈性模量E= 70 000 MPa,泊松比為0.3,質(zhì)量密度為2 750 kg/m3。
參照OCS-3技術(shù)條件要求[14],采用最大工作載荷加載于腕臂結(jié)構(gòu),具體加載方式:在承力索座處施加水平載荷F1、豎直載荷F2,定位器線夾位置處施加水平載荷F3、豎直載荷F4。傳統(tǒng)及簡統(tǒng)化腕臂定位裝置模型及具體加載情況如圖1所示。

圖1 模型及載荷施加位置
2 腕臂結(jié)構(gòu)動力學(xué)分析
2.1 模態(tài)分析
由于腕臂結(jié)構(gòu)在運行過程中會承受不同大小的工作載荷,不同的載荷條件下機械結(jié)構(gòu)會表現(xiàn)出不同的動態(tài)特性,因此需要利用模態(tài)分析了解結(jié)構(gòu)的共振區(qū)域,為結(jié)構(gòu)設(shè)計提供指導(dǎo),并進一步開展瞬態(tài)分析、譜分析。進行模態(tài)分析時一般只分析與工作頻率接近的固有頻率。經(jīng)有限元離散后結(jié)構(gòu)的運動方程為

式中:M為質(zhì)量矩陣;C為阻尼矩陣;K為剛度矩陣;為節(jié)點加速度向量;為節(jié)點速度向量;x為節(jié)點位移向量;F(t)為節(jié)點載荷向量。
基于模態(tài)分析探究結(jié)構(gòu)固有特性的過程中,無外界激勵作用,即F(t) = 0。阻尼矩陣C的取值一般為0,運動方程可簡化為

對簡統(tǒng)化及傳統(tǒng)腕臂結(jié)構(gòu)在無預(yù)應(yīng)力及3種不同預(yù)應(yīng)力情況下進行模態(tài)及后續(xù)動力學(xué)分析,參照OCS-3技術(shù)條件要求[14],載荷組合如表1所示。
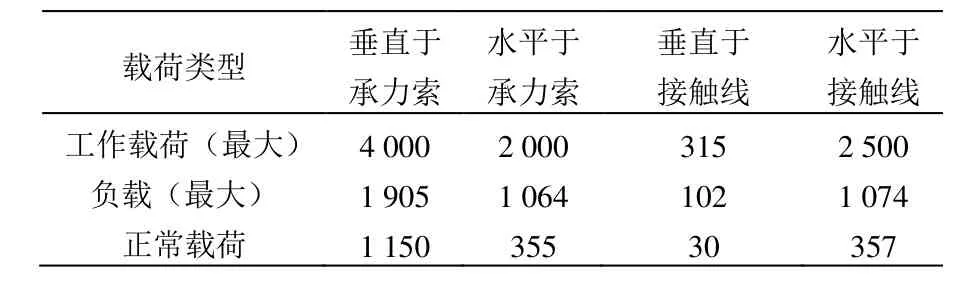
表1 腕臂結(jié)構(gòu)工作載荷 N
通過ABAQUS模態(tài)分析,分別得到兩種腕臂結(jié)構(gòu)在4種不同預(yù)應(yīng)力下的固有頻率,如圖2所示,可以看出4種不同預(yù)應(yīng)力下的各階固有頻率相近。

圖2 4種不同預(yù)應(yīng)力下腕臂結(jié)構(gòu)前10階固有頻率
兩種腕臂結(jié)構(gòu)在最大工作載荷作用下的前10階固有頻率如表2所示。
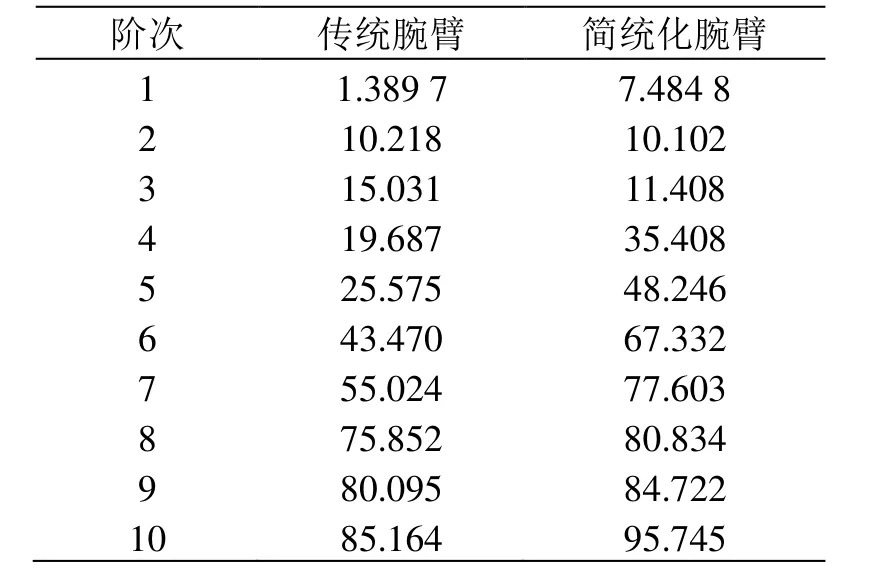
表2 腕臂結(jié)構(gòu)在最大工作載荷作用下前10階固有頻率 Hz
由于接觸網(wǎng)系統(tǒng)在實際工作過程中呈現(xiàn)為低頻振動,因此選擇分析腕臂結(jié)構(gòu)中較低階次(前3階)的振型。簡統(tǒng)化和傳統(tǒng)腕臂結(jié)構(gòu)前3階模態(tài)振型特征如表3、圖3所示。進一步將使用諧響應(yīng)分析法判斷結(jié)構(gòu)是否在共振區(qū)內(nèi)。
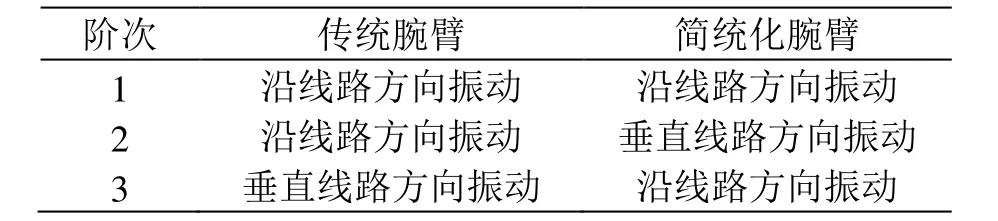
表3 腕臂結(jié)構(gòu)前3階模態(tài)振型特征

圖3 兩種腕臂結(jié)構(gòu)前3階模態(tài)振型
2.2 諧響應(yīng)分析
結(jié)構(gòu)計算中通常基于諧響應(yīng)分析計算結(jié)構(gòu)在給定頻率范圍內(nèi)的響應(yīng),從中得到響應(yīng)值,即共振點。在接觸網(wǎng)系統(tǒng)中,接觸網(wǎng)和受電弓的平均接觸壓力為120 N,且抬升力為周期載荷。將接觸壓力作用點設(shè)置在承力索座上,結(jié)構(gòu)阻尼比為0.015。
根據(jù)腕臂結(jié)構(gòu)位移分析結(jié)果,分別選取承力索座和定位器支座上某一節(jié)點作為數(shù)據(jù)的提取點,得到傳統(tǒng)腕臂不同預(yù)應(yīng)力下觀測點處的諧響應(yīng)位移曲線,如圖4所示。由圖4(a)、圖4(b)可知,在任何預(yù)應(yīng)力情況下,沿X方向(垂直)的振動幅值都會在第3階模態(tài)頻率處達到最大,此時的頻率約15 Hz,大于接觸網(wǎng)系統(tǒng)約1 Hz的激勵頻率,因此腕臂結(jié)構(gòu)不會在垂直方向上產(chǎn)生共振。沿Y方向(順線路)的諧響應(yīng)位移曲線見圖4(c)、圖4(d),無預(yù)應(yīng)力時,承力索座處的最大位移出現(xiàn)在約10 Hz頻率(第2階模態(tài)),定位器支座處在第1、2、3、5階模態(tài)時出現(xiàn)較大位移(Y方向)。結(jié)果顯示,傳統(tǒng)腕臂結(jié)構(gòu)定位器支座位移較大處為第1階模態(tài)位置,頻率為0.8 Hz(接近外界激勵頻率1 Hz)。

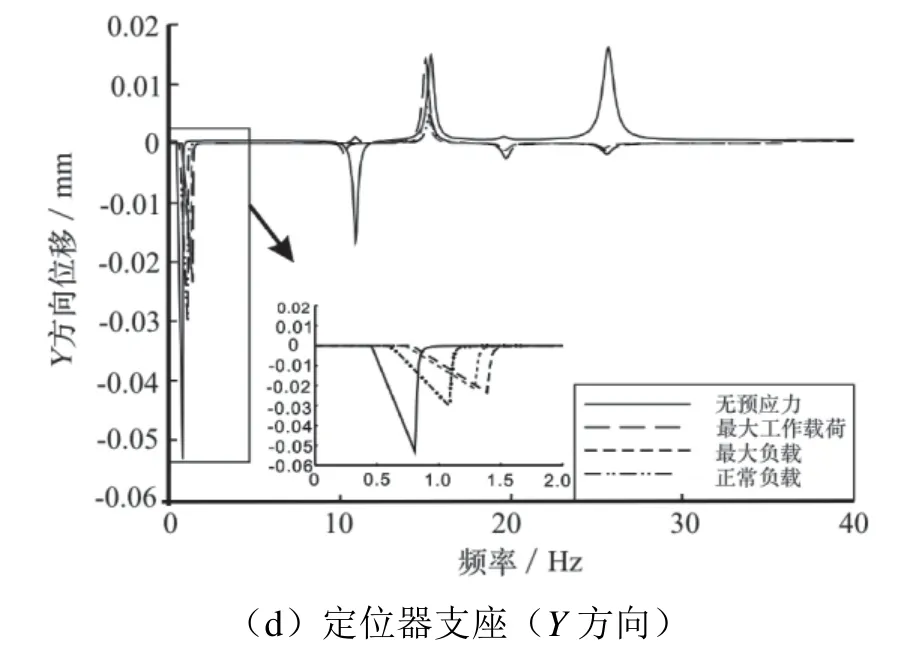
圖4 傳統(tǒng)腕臂諧響應(yīng)位移曲線
由諧響應(yīng)分析結(jié)果發(fā)現(xiàn),傳統(tǒng)腕臂結(jié)構(gòu)在外界存在預(yù)應(yīng)力時的振動特性結(jié)果較為符合實際。雖然在該種外界情況下得到的第1階模態(tài)頻率約為1 Hz,與接觸網(wǎng)系統(tǒng)激勵頻率相近,但是其位移幅值較低,引起腕臂結(jié)構(gòu)振動的概率極低。
對簡統(tǒng)化腕臂結(jié)構(gòu)采取同樣的方式進行諧響應(yīng)分析,分別選取承力索座和定位器管末端某一節(jié)點作為數(shù)據(jù)觀測點,觀察最大載荷作用下簡統(tǒng)化腕臂結(jié)構(gòu)的諧響應(yīng)位移曲線,結(jié)果如圖5所示。接觸網(wǎng)系統(tǒng)振動形式主要表現(xiàn)為低頻顫振,因此主要觀察低頻段波形數(shù)據(jù)。
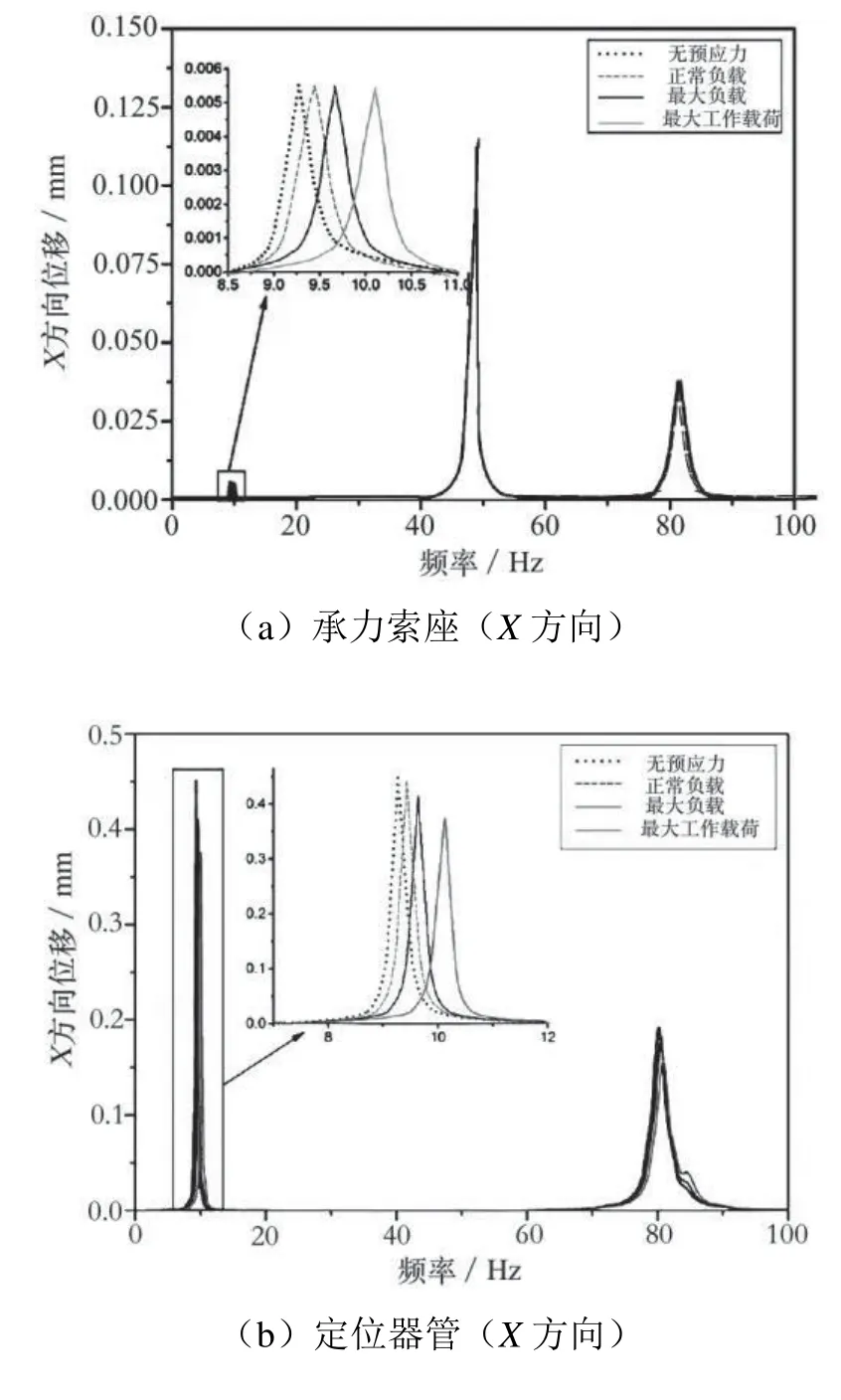

圖5 簡統(tǒng)化腕臂諧響應(yīng)位移曲線
由圖5(a)、圖5(b)可以看出,4種不同工作載荷作用下承力索座和定位器管末端沿X軸方向的振動均在第2階模態(tài)頻率處(約9.5 Hz)產(chǎn)生最大位移。觀察圖5(c)、圖5(d),在第1階(約6.5 Hz)、第2階、第3階(約11 Hz)模態(tài)處均存在沿Y軸方向(沿線路方向)的振動,但其幅值較低,并不能引起腕臂結(jié)構(gòu)沿該方向的較大位移。觀察圖5(e)、圖5(f),在第2階模態(tài)處產(chǎn)生沿Z方向(垂直線路方向)的最大位移,該波形與圖5(a)、圖5(b)相似,但振動幅值有所增加,承力索座處振幅增加0.004 5 mm,約為X軸方向幅值的2倍,定位器管末端振動幅值增加約1.5 mm。對比傳統(tǒng)腕臂結(jié)構(gòu)的諧響應(yīng)位移曲線,簡統(tǒng)化腕臂結(jié)構(gòu)在承力索座沿X、Y、Z軸方向和定位器管末端沿X、Z軸方向上產(chǎn)生共振的頻率略微降低,但在傳統(tǒng)腕臂結(jié)構(gòu)出現(xiàn)位移較大處(定位器管沿Y軸方向)的共振頻率大幅增大,從而避免腕臂結(jié)構(gòu)沿該方向產(chǎn)生共振。
2.3 瞬態(tài)動力學(xué)分析
瞬態(tài)動力學(xué)分析可以確定結(jié)構(gòu)在穩(wěn)態(tài)載荷、瞬態(tài)載荷和簡諧載荷的任意組合作用下隨時間變化的位移、應(yīng)變以及應(yīng)力等。
使用ABAQUS中的Explicit功能,能夠求解兩種腕臂結(jié)構(gòu)在最大工作載荷情況下的瞬態(tài)動力學(xué)響應(yīng)。根據(jù)兩種結(jié)構(gòu)的模態(tài),設(shè)定分析步長(時長)為1 s,時間增量為0.005 s。為更直觀比較兩種腕臂結(jié)構(gòu)的瞬態(tài)動力學(xué)特性,提取承力索座處和定位器支座處的位移時間曲線,結(jié)果如圖6和圖7所示,L1、L2和L3分別表示垂直于地面方向、沿線路方向和垂直于線路方向位移。從圖中可以看出,位移隨時間大致呈正弦波形,且振幅逐漸減小。比較傳統(tǒng)腕臂結(jié)構(gòu)3個方向的位移不難發(fā)現(xiàn),垂直地面方向的位移量相對較大,沿線路方向的位移量相對較小,即弓網(wǎng)瞬間接觸時,腕臂結(jié)構(gòu)沿豎直方向產(chǎn)生較大的振動。實際運行過程中,豎直方向的振動會影響弓網(wǎng)的受流性能,位移過大將增加離線和滑板異常磨損的風(fēng)險。比較傳統(tǒng)腕臂結(jié)構(gòu)和簡統(tǒng)化腕臂結(jié)構(gòu)的位移時間歷程曲線可以看出,簡統(tǒng)化腕臂結(jié)構(gòu)在3個方向上的位移量要小于傳統(tǒng)腕臂結(jié)構(gòu),即在3個方向上的位移量總體優(yōu)于傳統(tǒng)腕臂結(jié)構(gòu),因此運行過程更加平穩(wěn),弓網(wǎng)受流質(zhì)量更高。

圖6 兩種腕臂結(jié)構(gòu)承力索座處位移時間歷程曲線


圖7 兩種腕臂結(jié)構(gòu)定位器支座處位移時間歷程曲線
3 結(jié)論
采用有限元分析法對傳統(tǒng)腕臂結(jié)構(gòu)和簡統(tǒng)化腕臂結(jié)構(gòu)開展了動力學(xué)分析,得出主要結(jié)論如下:
(1)從模態(tài)分析得知,簡統(tǒng)化腕臂結(jié)構(gòu)固有頻率遠高于接觸網(wǎng)系統(tǒng)低頻顫振頻率,即不容易發(fā)生共振現(xiàn)象;
(2)諧響應(yīng)分析結(jié)果表明,弓網(wǎng)穩(wěn)定接觸過程中,傳統(tǒng)腕臂結(jié)構(gòu)定位器支座位移較大處的頻率為0.8 Hz(接近外界激勵頻率1 Hz),而簡統(tǒng)化腕臂結(jié)構(gòu)位移較大處的頻率遠大于1 Hz,產(chǎn)生共振的可能性很小;
(3)瞬態(tài)動力學(xué)分析結(jié)果表明,弓網(wǎng)接觸瞬間簡統(tǒng)化腕臂結(jié)構(gòu)產(chǎn)生的位移小于傳統(tǒng)腕臂結(jié)構(gòu),弓網(wǎng)運行過程更加平穩(wěn)、受流質(zhì)量更佳。
猜你喜歡
計算機應(yīng)用(2022年2期)2022-03-01 12:33:42
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
計算機應(yīng)用(2021年4期)2021-04-20 14:06:36
計算機應(yīng)用(2021年1期)2021-01-21 03:22:38
中華詩詞(2019年7期)2019-11-25 01:43:04
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
湖北經(jīng)濟學(xué)院學(xué)報·人文社科版(2015年8期)2015-12-29 05:53:07
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
上海電機學(xué)院學(xué)報(2015年4期)2015-02-28 14:30:00
小天使·一年級語數(shù)英綜合(2015年2期)2015-01-14 06:35:05
