高速鐵路接觸網整體吊弦振動譜采集系統設計
2022-01-10 10:03:46潘利科陳立明徐可佳張海波楊才智董冠闊
電氣化鐵道 2021年6期
潘利科,陳立明,徐可佳,張海波,楊才智,邢 彤,董冠闊
0 引言
整體吊弦安裝在電氣化鐵路接觸網承力索和接觸線之間,主要起懸吊和載流作用,對保障接觸線的平順性以及穩定受流質量具有重要作用[1,2]。
列車經過時,由于受電弓的接觸力及抬升作用,導致接觸線向上運動,帶動整體吊弦、承力索等運動,并使吊弦發生彎曲。當列車經過后,在接觸網的重力等作用下,整體吊弦隨接觸線向下運動,并在接觸網的彈性作用下發生縱向振動。在此過程中的振動位移即為振動譜。
由于接觸網系統通有大電流,且列車受電弓通過與接觸線滑動摩擦取電,因此整體吊弦的振動譜需通過非接觸方式測量。文獻[3]介紹基于圖像處理的單通道圖像采集系統,在接觸網支柱上安裝圖像采集系統,采用非接觸方式測量整體吊弦的振動譜。文獻[4,5]論述通過列車上的視頻監測系統實現列車運行位置整體吊弦圖像的采集。文獻[6~8] 介紹一種單通道圖像采集系統采集整體吊弦的振動譜。上述采集方法均是基于圖像識別技術,并且均是單通道采集。
為了更準確反映一跨內6根整體吊弦振動的相關性及相互影響規律,并不影響列車正常運行,本文基于圖像識別技術設計了一種非接觸式6通道整體吊弦振動譜采集系統,為深入研究并分析一跨內6根整體吊弦的振動規律以及相互影響提供技術手段。
1 振動譜采集原理
整體吊弦的振動是由于列車受電弓抬升激勵導致整體吊弦向上彎曲,隨后向下自由垂落,并在接觸網系統的彈性阻尼緩沖作用下,整體吊弦隨接觸網系統發生的阻尼振動過程,其振動譜受接觸網系統彈性和阻尼系數、列車運行速度、受電弓抬升量等因素綜合影響。
1.1 接觸網振動波傳播過程
接觸網系統波動產生影響因素包括振動波源和振動波傳播介質。其中,振動波源為列車通過時受電弓抬升力致接觸線的抬升,隨后在整體吊弦的彎折、自由垂落過程中引發的上下振動和前后波動,其中上下振動為主要振動波源,前后波動可以忽略。接觸網振動波的主要傳播介質為接觸網系統,包括接觸線、整體吊弦、承力索、彈性吊索以及其他支撐和懸吊零部件等。組成接觸網系統的各零部件的阻尼使得接觸網系統振動逐漸衰減為零。
當列車受電弓通過整體吊弦下端的接觸線后,接觸點位置的振動由接觸網系統本身的阻尼振動和接觸網波動疊加組成。根據波的疊加原理,當幾列波同時在同種介質中傳播時,它們分別以其原有的頻率、振幅和波長獨立傳播;幾列波相遇處的位移為各列波單獨傳播時該處位移的矢量和[6,9],因此測量點的振動方程可以表示為

式中:A為振幅;β為阻尼;t為時間;ω1為接觸網被測點的固有角頻率;φ1為阻尼振動開始位置;B為接觸網波動傳遞至被測點時的振幅;ω2為接觸網波動傳播時的固有角頻率;φ2為阻尼振動結束位置;x為機車受電弓位置與測量點的距離;u為接觸網波動傳播速度。
1.2 接觸網振動采集原理
根據接觸網振動波的傳播過程,采集整體吊弦的振動譜需要定位整體吊弦上下兩端的位移。實際服役過程中,整體吊弦上下兩端分別連接承力索和接觸線,整體吊弦隨著承力索和接觸線的振動發生阻尼振動。
在整體吊弦隨承力索和接觸線振動過程中,利用圖像識別方法,分別采集承力索和接觸線的振動圖像,通過圖像處理軟件將其轉換為位移信息,再進行位移差值處理,得到整體吊弦的位移量,即整體吊弦的振動譜。采集流程如圖1所示。
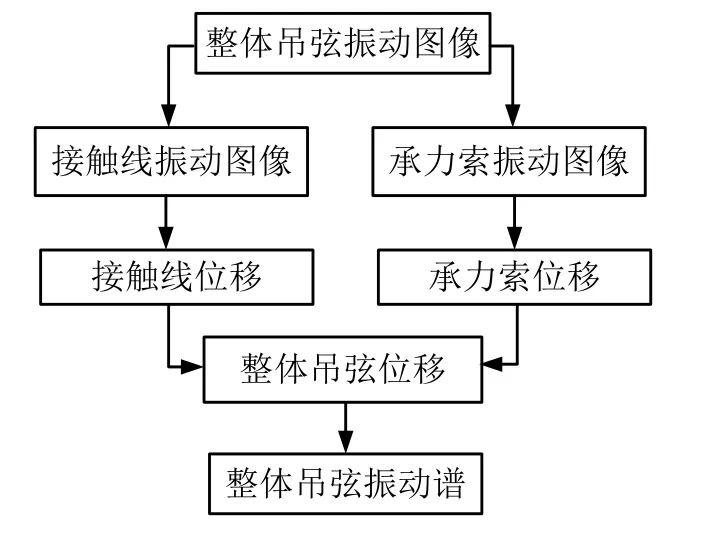
圖1 整體吊弦振動譜采集流程
2 振動譜采集系統設計
由于接觸網系統是帶電服役,在振動譜采集過程中需采用非接觸方式進行采集。并且為了對比相同跨不同吊弦的振動譜的振動規律和相互影響,設計6通道振動譜采集系統同時采集列車經過前后6根整體吊弦的振動過程。該6通道整體吊弦振動譜采集系統主要采集6根及以下吊弦的振動譜,如圖2所示。其由6套圖像采集部件組成,可以在距高速鐵路線路60~200 m范圍內采集整體吊弦的振動譜。
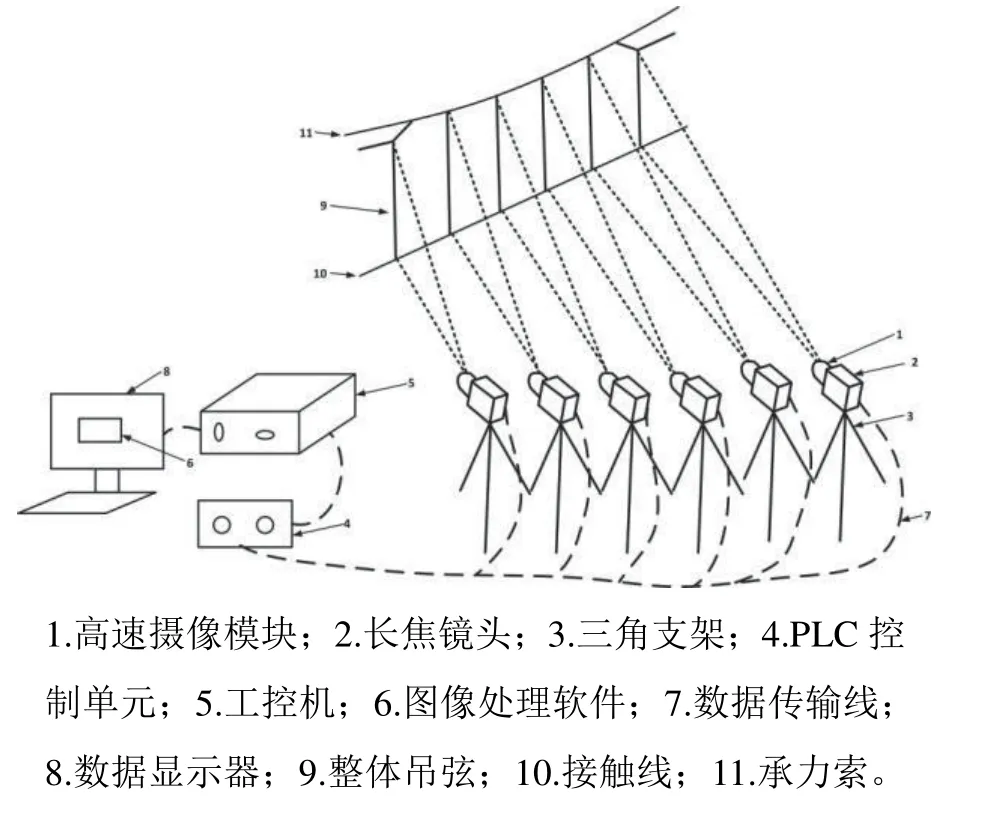
圖2 整體吊弦振動譜采集系統
接觸網整體吊弦振動譜采集系統主要組成部分包括采集裝置、控制系統、數據處理系統和顯示系統,其中采集裝置由高速攝像模塊、長焦鏡頭、三角支架組成,控制系統包括PLC控制單元和工控機,數據處理系統主要通過圖像處理軟件將圖像轉換為數字信息,顯示系統則通過數據傳輸線與數據顯示器實現數據傳輸與實時顯示功能。
采集系統的采集頻率為200~300幀/s,可滿足時速350 km高速列車通過時整體吊弦振動譜采集。采集距離為60~200 m,采集角度為45°~60°。
振動譜采集過程中,采集裝置在高速鐵路線路附近非接觸式測量整體吊弦的振動圖像,其測量距離、測量角度的調整均可以通過調整長焦鏡頭及三角支架實現,采集系統采用6套同時采集方式。控制系統通過PLC控制單元實時控制接觸網一跨內6根整體吊弦的采集過程,并保證6根整體吊弦的采集過程同步進行;采集的整體吊弦圖像數據實時記錄并同步存儲在工控機上。
整體吊弦振動譜的圖像識別通過高速攝像模塊采集并識別整體吊弦上下兩端承力索和接觸線的圖像,并通過圖像處理軟件將其圖像轉換為數字信息,然后實時比對接觸線和承力索數字信息,從而獲得整體吊弦的振動譜數據。為保證采集過程的準確性,首先需要對采集系統進行標定。根據接觸網一跨內吊弦的長度,通過采集系統讀取某位置吊弦上下兩端承力索和接觸線的圖像,通過圖像中承力索和接觸線的位置差計算出吊弦的長度,并與現場實測該位置的吊弦長度進行比對,得到校準系數,最終實現圖像轉換為數字信息時的誤差校準。
該采集系統具有以下優點:(1)可實現非接觸式測量,不影響列車的正常運行;(2)操作方便,可在線路附近安裝,采集地點靈活;(3)多通道同時采集,數據之間可相互校準,且數據干擾小;(4)數據讀取方便,具有圖像采集與軟件處理功能,可以實時獲取被采集位置整體吊弦的振動譜。
采集系統的關鍵技術指標包括采集頻率、圖像分辨率等。由于高速列車通過時的速度可達350 km/h,即97.2 m/s,而吊弦的間距最短可達8 m,則1 s內通過的吊弦數約為12個,因此要求采集系統具有較高的采集頻率,以采集到列車受電弓高速通過瞬間吊弦的振動特征。圖像分辨率則要求能清晰識別出200 m范圍內吊弦的圖像,并能追蹤到在高速列車通過時吊弦振動過程中的圖像。振動譜識別需要通過圖像處理技術將圖像數據轉換為吊弦的位移等數字信息,但是由于采集過程中周圍環境的樹枝、電線、非目標區域吊弦線等影響,在圖像處理過程中應根據吊弦振動數據進行識別。
3 接觸網振動譜采集過程
現場采集過程中,首先將6個由高速相機和長焦距鏡頭組成的采集裝置架設在高速鐵路線路附近,設置圖像采集裝置的焦距,分別聚焦一跨內6根整體吊弦的上下兩端的承力索吊弦線夾和接觸線吊弦線夾處的承力索和接觸線,然后打開測量軟件開始實時記錄并保存采集位置整體吊弦的圖像。
采集系統中高速攝像模塊的采集頻率可達300幀/s,能夠滿足350 km/h高速列車通過時的振動譜采集需求。長焦鏡頭能在60~200 m范圍采集到清晰的整體吊弦振動圖像。
現場測量時,通過圖像識別技術,分別獲得整體吊弦上下線夾位置承力索和接觸線的垂向位移時間歷程,即吊弦上下兩端的動態抬升量;通過高速攝像模塊可以獲得吊弦在某一瞬時的圖像,如圖3所示;將連續時間內獲得的所有圖片匯總,可得到整體吊弦整個振動過程的振動譜,即位移隨時間變化曲線,如圖4所示。
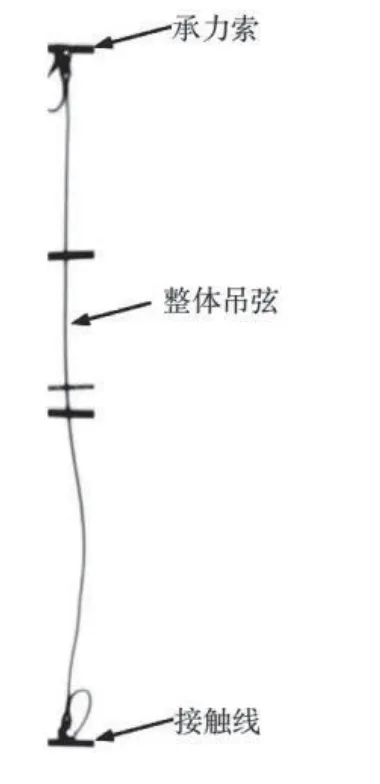
圖3 整體吊弦瞬時振動圖像
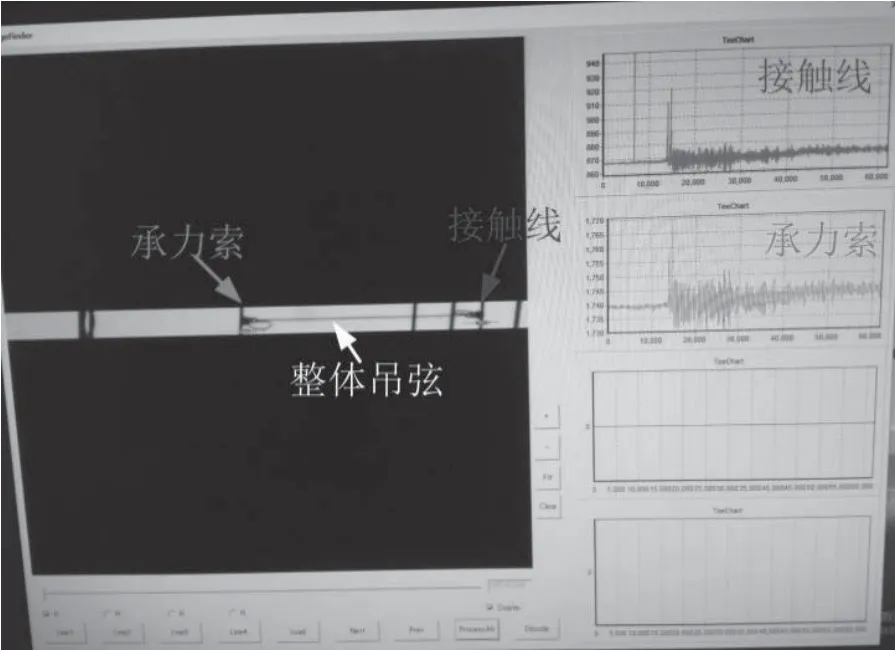
圖4 整體吊弦振動譜數據處理
整體吊弦振動譜采集過程中,首先需要確定采集點,其需滿足以下要求:(1)采集點需距離高鐵站點一定距離且線路彎曲半徑不大,列車可以提速至較高的速度,滿足高速下振動譜的采集要求;(2)整體吊弦的振動譜采集點距離高鐵線路在100~200 m范圍內,距離太近會超出焦距,也使采集系統仰角過大,導致采集誤差偏大,此外還會由于整體吊弦振動太大超過其采集范圍;距離太遠則高速攝像模塊鏡頭中的視野過大,干擾物多,且清晰度有所降低,影響采集精度。
選定好采集點后,按照圖2所示結構搭建采集系統,并將振動譜采集系統的6個高速攝像模塊分別對應一跨內6根整體吊弦,微調高速攝像模塊的仰角和距離,使得被采集位置的整體吊弦上下兩端均位于視野的2/3位置,保證振動過程中整體吊弦上下兩端未超出視野范圍。同時調整曝光時間等參數,保證采集清晰度,降低采集誤差。此外,采集前應先進行系統測試,即列車經過前先進行采集,觀察6個采集通道是否同步,并進行校準。
采集過程記錄列車經過前、經過時、經過后采集點整體吊弦的振動過程,并生成振動譜。采集過程中,可以根據列車前后受電弓經過采集點的時間計算列車速度,并根據整體吊弦振動譜計算振動頻率、壓縮幅值等參數。
采集過程中,通過軟件實時處理采集位置接觸線和承力索的圖像,并將圖像數據轉換為數字信息,實時繪制接觸線和承力索的位移隨時間變化曲線,并自動獲取整體吊弦的振動譜。在圖像讀取過程中,分別在圖像中標記出承力索的下側與接觸線的上側(圖4),然后通過識別圖像中標記的位移量計算吊弦的位移。通過軟件自動讀取時,由于受到周邊其他線索圖像的影響,還需要根據吊弦的振動特征峰值規律不斷對圖像數據進行修正。
4 結語
本文根據電氣化鐵路接觸網整體吊弦的振動譜采集原理,設計了一種6通道非接觸式整體吊弦振動譜采集系統,其通過圖像識別技術可以同時得到一跨內6根整體吊弦的振動譜,為研究高速列車對整體吊弦振動和失效的影響規律奠定基礎。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
艦船科學技術(2022年8期)2022-06-05 07:36:28
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
