基于模糊多模型的堆芯功率控制
2022-01-14 12:34:40張哲郭天碩
科學與信息化 2022年1期
張哲 郭天碩
國核示范電站有限責任公司 山東 威海 264300
引言
反應堆堆芯具有各種擾動不確定性、非線性、時變參數的特點,在單一功率水平下,基于局部堆芯模型在擾動條件下控制堆芯功率,難以準確描述。當前,PID 控制器廣泛用于堆芯功率控制,其優點在于簡單、直觀和易于實施。
1 反應堆功率分布控制控制方法
現代核電站的設計的反應堆功率分配通常使用恒定軸向偏移控制方法來控制。軸向偏移操作帶和目標值通過負荷跟蹤計算確定控制棒提升限值、操作帶調整寬度、 控制棒位置等設計參數,確保其具有可操作性和輸出能力,最大化使反應堆功率盡可能。此外,需要對反應堆的各種運行條件或瞬態功率進行大量計算和分析,以確定滿足設計標準的運行圖和控制棒插入限值[1]。
2 堆芯模糊多模型建立
2.1 堆芯非線性模型
核反應點堆建模原理用于建立堆芯非線性模型,忽略氙等中子毒物的影響。
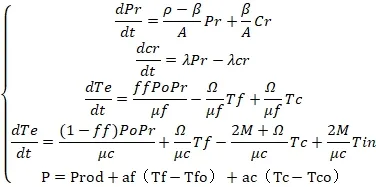
其中Pr=P/Po是堆芯的相對功率,Po為堆芯的標準功率, Cr= c/co,c是靜止延遲中子先驅核的核密度,Cr是相對密度的先驅核,μf是總熱容的燃料,A是反應堆中的中子產生量;Tf是平均溫度的燃料;p是總反應性的引入堆芯,Tin是入口堆芯冷卻劑溫度;λ是延遲中子先驅核的衰變常數,Ω是冷卻劑和燃料之間的傳熱系數;ff是總份額的燃料產生熱量;β是總份額延遲中子;μc是總熱容的冷卻劑;Tc是平均溫度的冷卻劑;燃料的多普勒系數是αf;冷卻液溫度反饋系數為αc;質量流量熱容是M;Tco,Tfo是穩定狀態下堆芯冷卻劑的平均溫度和堆芯燃料溫度,反應性的控制棒引入是prod。
2.2 堆芯模糊多模型
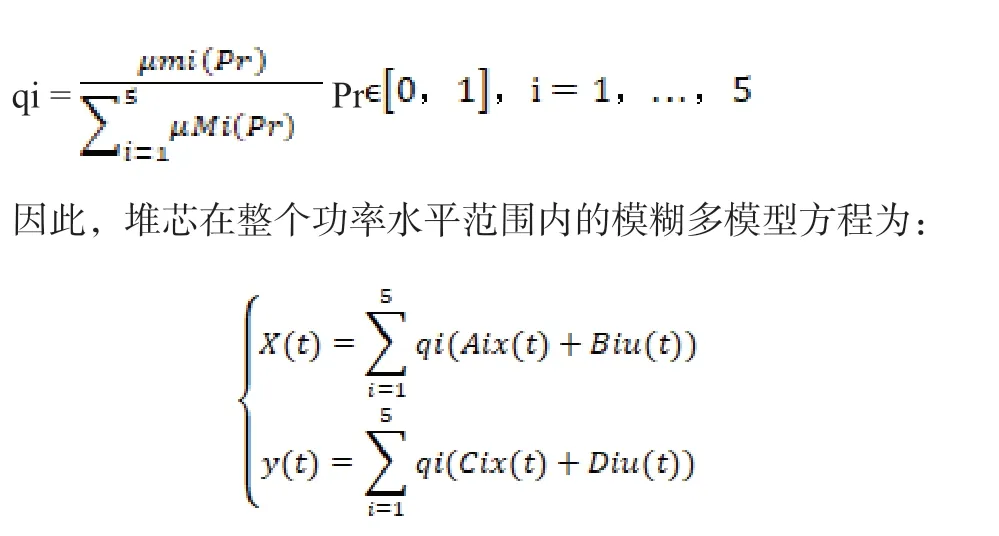
上面得到的堆芯模型只適用于整個堆芯運行范圍的小范圍功率變化。如果功率在很大范圍內變化,則適用性較差[2]。Gp5、Gp4、Gp3、Gp2、Gp1線性模型建立了堆芯的部分模型,全功率運行范圍為了建立適合的模型,在整個功率水平范圍內三角隸屬函數用于獲得堆芯的模糊多模型。在整個功率水平范圍內圖1顯示了堆芯模糊多模型的隸屬函數。Zi: Pr=Mi如果Yoi=Gpi(i=1,...,5)。其中第i個模糊規則是Zi。 M1、M2、M3、M4和 M5 分別是功率水平為20%FP、40%FP、60%FP、80%FP 和100%FP的模糊集。Pr為μx(P),線性模型的對應于模糊集 M 是Gpi。隸屬度屬于Mi時,權重qi為:

圖1 基于核功率反饋控制的棒控系統
3 堆芯功率控制
3.1 堆芯功率控制系統設計
1.2節的堆芯傳遞函數模型是雙輸入雙輸出,堆芯輸入是入口堆芯溫度和控制棒反應性,堆芯入口溫度不可控,而后者是可控量。堆芯冷卻劑的平均溫度通過控制堆芯輸出控制。所以,如圖2所示,堆芯功率反饋控制可以單獨使用。
3.2 堆芯功率控制系統開發
表1顯示了TMI型壓水堆作為對象的堆芯結構參數。
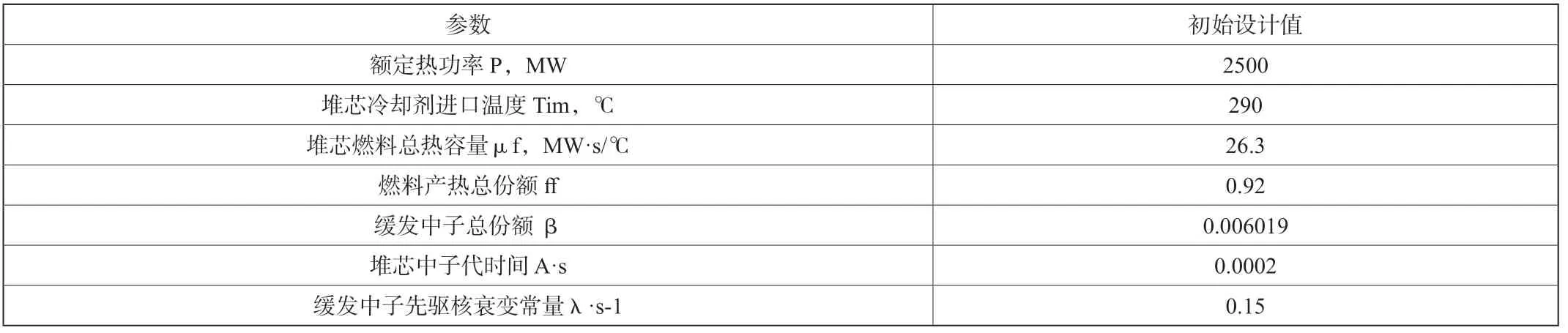
表1 TMI型壓水堆堆芯初始設計參數
考慮方程的參數P,它隨著功率的變化而變化。 隨著功率的變化,參數μc、ac、μf、αf、Ω和M都隨著堆芯中的溫度而變化。

將20% FP、40% FP、60% FP、80% FP、100% FP等5個不同堆芯功率水平的傳遞函數模型組合成三角隸屬度,搭配相應功率設計的控制器。如圖2所示,基于MATLAB/Simulink Ei2開發了控制堆芯功率系統、加權積分。堆芯參考功率和有功功率的比較輸出通過仿真系統設計模糊PID控制器和參考功率來提供[3]。
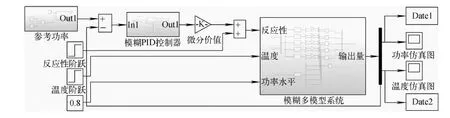
圖2 基于模糊多模型的堆芯功率控制系統仿真框圖
4 仿真結果及分析
在兩個初始穩態功率水平(80% FP和100% FP)下,系統在仿真前50s以初始穩態功率運行。50s內,堆芯功率水平下降10%FP,原來的功率水平60s穩定運行后恢復,經歷10%FP階躍在各種初始功率水平下變化時,減少參考功率與實際功率之間的誤差,在模糊PID控制下系統快速響應,相對較短的進程消耗時間。初始穩態功率在30% FP的水平下,在仿真前50s系統以初始穩態功率運行。以5%FP/min的速度線50s內,目標負載性增加20%FP,210s后穩定運行,以5%FP/min的速度線性上升至穩態初始功率。堆芯功率當系統跟蹤時,核心功率模糊PID控制值運行參考值接近堆芯功率,沒有明顯偏差。堆芯相對輸出與堆芯冷卻劑平均溫度偏差的變化同步。在100%FP水平下初始穩態功率,仿真前300s系統以初始穩態功率運行。速率線目標以15% FP/min的負載性,在300s內下降75% FP,線性功率變化率可以增加,PID控制值堆芯功率模糊也接近堆芯功率運行參考值,平均溫度偏差堆芯冷卻劑同步。在各種初始穩態功率下,局部控制可以使用模糊PID進行。在100% FP功率水平下引入堆芯冷卻劑,2.5℃擾動入口溫度步驟時,引入堆芯冷卻劑在10s內,入口溫度階躍擾動時,迅速增加功率。PID控制器在模糊的運行下,功率緩慢上升堆芯最終穩定,溫度變化逐漸減弱趨勢并最終穩定。堆芯冷卻劑引入的入口處與穩定值的溫度階躍值相同,引入堆芯入口溫度無效反饋抵消了系統產生的階躍擾動對功率的影響,經過一段時間后,最終恢復到堆芯功率水平初始穩態水平,系統處于平衡狀態[4]。
5 堆芯的狀態反饋控制
全狀態反饋方法設計每個局部控制器,全維觀測器基于局部模型采用,極點反饋設計利用極點布局技術實現。局部全維觀測器被魯棒卡爾曼濾波器設計,考慮到堆芯特定功率水平和線性化非線性模型之間的差異,以及干電抗器技術用于每個局部控制器的非線性模型,非線性模型用于再現干式反應器技術的完美狀態,本地控制器構成了全方位狀態觀測器和極坐標位置反饋[5]。
6 結束語
綜上所述,堆芯功率控制系統在MATLAB/Simulink中建立,TMI PWR堆芯,進行了堆芯入口溫度擾動仿真分析和對于堆芯功率跟蹤,這表明堆芯功率控制使用模糊PID控制器可以完全實現。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
火花(2019年12期)2019-12-26 01:00:28
人大建設(2019年12期)2019-05-21 02:55:32
光學精密工程(2016年6期)2016-11-07 09:07:19
學苑創造·A版(2015年11期)2016-01-14 09:03:27
核科學與工程(2015年4期)2015-09-26 11:59:03
中國火炬(2010年8期)2010-07-25 11:34:30