
界面力限控制技術(shù)試驗(yàn)研究
2022-01-18 01:13:26孫佳川龐家志李航吳俊嫻馬璐軍孫勇
環(huán)境技術(shù) 2021年6期
孫佳川,龐家志,李航,吳俊嫻,馬璐軍,孫勇
(1.航天科工防御技術(shù)研究試驗(yàn)中心,北京 100854; 2.空軍裝備部駐北京地區(qū)第一軍事代表室,北京 100854)
引言
在振動(dòng)試驗(yàn)中,由于振動(dòng)臺(tái)具有較大的機(jī)械阻抗,并且固定被試品的試驗(yàn)夾具限制了被試品在彎曲、扭轉(zhuǎn)等其它方向的自由度,因此會(huì)導(dǎo)致被試品與振動(dòng)臺(tái)之間在被試品的基頻共振點(diǎn)處具有較大的界面力。
在飛行器飛行過程中,振動(dòng)的響應(yīng)一般包括了被試品及其安裝支座的共同振動(dòng),被試品與其安裝支座組成的耦合系統(tǒng)往往存在較大的阻尼,則在飛行狀態(tài)中飛行器被試品的共振響應(yīng)會(huì)很小。
在實(shí)際試驗(yàn)中,航天器上的被試品通常安裝在相對(duì)輕質(zhì)的支座上,輕質(zhì)支座的機(jī)械阻抗與被試品的響應(yīng)是相適應(yīng)或匹配的,振動(dòng)傳遞過程中會(huì)降低被試品基頻的共振頻率,進(jìn)而限制了界面力,因此被試品在實(shí)際安裝中可以避免發(fā)生較大的共振響應(yīng)。但是試驗(yàn)中由于振動(dòng)臺(tái)的機(jī)械阻抗原因又導(dǎo)致了剛性固定于振動(dòng)臺(tái)上的被試品共振點(diǎn)響應(yīng)的放大,若不進(jìn)行限制則會(huì)造成航天器被試品過試驗(yàn)[1]。力限控制的目的就是為了減少振動(dòng)臺(tái)帶來的共振響應(yīng),以更加真實(shí)的模擬被試品在飛行過程中的安裝與振動(dòng)狀態(tài)。
力限振動(dòng)試驗(yàn)使用力傳感器對(duì)界面力進(jìn)行測(cè)量和限制,并使用加速度傳感器在界面進(jìn)行測(cè)量和控制[2]。在一般的力限試驗(yàn)中,通常將輸入加速度作為控制,并將界面力作為響應(yīng)進(jìn)行實(shí)施,是加速度和力的雙重控制方法。當(dāng)被試品與振動(dòng)設(shè)備間的界面力未超過力限值時(shí),以加速度試驗(yàn)條件作為控制,當(dāng)界面力到達(dá)或超過力限值時(shí),力傳感器介入控制,加速度曲線則自動(dòng)下凹,使其不超過定義的限制譜[3,4]。
由于力限振動(dòng)試驗(yàn)技術(shù)是用來減輕被試品發(fā)生共振時(shí)的界面力的,因此該技術(shù)常應(yīng)用于大共振結(jié)構(gòu),如一些衛(wèi)星天線、太陽翼、反射器等類似結(jié)構(gòu)的被試品、軟阻尼結(jié)構(gòu)及安裝在柔性支座上的電子被試品等。相對(duì)于加速度控制,力限控制方法更能有效的解決振動(dòng)試驗(yàn)中的過試驗(yàn)問題。本文結(jié)合實(shí)際被試品,通過力限試驗(yàn)的開展,對(duì)力限試驗(yàn)中的關(guān)鍵技術(shù)進(jìn)行了研究和探索,并對(duì)試驗(yàn)開展結(jié)果進(jìn)行了分析和討論。
1 力限試驗(yàn)的預(yù)準(zhǔn)備
力限試驗(yàn)的預(yù)準(zhǔn)備包括力限夾具設(shè)計(jì)、力傳感器的安裝與校準(zhǔn)、力信號(hào)的處理、力限譜的制定、力限控制策略的選擇等,這些因素都會(huì)對(duì)力限控制的效果產(chǎn)生一定的影響。
1.1 力限夾具的設(shè)計(jì)
不同于一般的振動(dòng)試驗(yàn)夾具,力限試驗(yàn)夾具除了要考慮與被試品的連接接口外,還需要考慮被試品的質(zhì)量大小、力傳感器的安裝等因素。在力限試驗(yàn)中,力傳感器要保證串聯(lián)于振動(dòng)設(shè)備與被試品之間。在實(shí)際設(shè)計(jì)時(shí),力限試驗(yàn)一般需要上下兩個(gè)夾具,使上夾具與被試品相連、下夾具與振動(dòng)臺(tái)相連,同時(shí)在上下兩個(gè)夾具之間連接力傳感器。根據(jù)經(jīng)驗(yàn)值,上夾具的質(zhì)量不應(yīng)超過被試品質(zhì)量的10 %,這是由于此時(shí)力傳感器讀取的力值是上夾具與被試品力值的總和,上夾具振動(dòng)時(shí)所產(chǎn)生的力將被疊加計(jì)算到被試品的力值譜中,如果夾具質(zhì)量較大的話,力限僅能在被試品的低階模態(tài)下起作用,在較高階模態(tài)下,夾具振動(dòng)產(chǎn)生的力會(huì)產(chǎn)生較大的噪聲,掩蓋了被試品本身在高階模態(tài)下的力[5,6]。此外,為保證安裝于上下夾具之間的力傳感器受力均勻,夾具的設(shè)計(jì)應(yīng)滿足力傳感器并行連接的平面度及平行度的要求。
1.2 力傳感器的安裝與校準(zhǔn)
力傳感器固定于上下夾具之間,因此力傳感器在安裝時(shí),應(yīng)保證傳感器的敏感軸與受力方向一致。此外,為施加預(yù)緊力,力傳感器的兩端往往還要設(shè)計(jì)預(yù)緊螺柱和轉(zhuǎn)接螺母,預(yù)緊螺柱穿在力傳感器的環(huán)形孔位中,兩端用轉(zhuǎn)接螺母預(yù)緊,預(yù)緊后再與上下夾具連接。在施加預(yù)緊力時(shí),一方面要求傳感器工作時(shí)的最大應(yīng)力不應(yīng)超過其自身量程;另一方面要求預(yù)緊力應(yīng)足夠大,以阻止相對(duì)剪切滑動(dòng);此外,預(yù)緊力還應(yīng)大于被測(cè)拉力,在動(dòng)態(tài)響應(yīng)時(shí),提供足夠的卸載空間。
通常每個(gè)力傳感器有自身的出廠靈敏度,但在力限試驗(yàn)中,力傳感器的靈敏度還與預(yù)緊力相關(guān),這是因?yàn)榕c力傳感器相連的預(yù)緊螺栓會(huì)承擔(dān)一部分動(dòng)載荷。在力傳感器的安裝中,力傳感器與螺栓的連接方式可以等效為兩個(gè)并聯(lián)的彈簧,其各自所受的力與其剛度成正比,預(yù)緊后的力傳感器靈敏度(V/N)=傳感器出廠靈敏度×(傳感器剛度/(傳感器剛度+螺栓剛度))。由于力傳感器與夾具連接過程中也會(huì)對(duì)靈敏度造成一定的影響,因此在安裝完成后,還需要對(duì)力傳感器靈敏度進(jìn)行校準(zhǔn)。力傳感器的校準(zhǔn)可以靜態(tài)校準(zhǔn)也可以動(dòng)態(tài)校準(zhǔn),動(dòng)態(tài)校準(zhǔn)可以通過小量級(jí)正弦掃描或隨機(jī)振動(dòng)獲得,靜態(tài)校準(zhǔn)利用質(zhì)量塊或標(biāo)準(zhǔn)載荷得到,校準(zhǔn)時(shí)根據(jù)力傳感器的示值與所承受載荷相比較,得出力傳感器的靈敏度。
1.3 力信號(hào)的處理
力限試驗(yàn)中,由于多個(gè)力傳感器是通過并聯(lián)的方式串聯(lián)于夾具與被試品之間,因此,在動(dòng)態(tài)測(cè)量時(shí),被試品所產(chǎn)生的慣性力是多個(gè)力傳感器測(cè)得力值的疊加,即:
在實(shí)際試驗(yàn)時(shí),F(xiàn)合可通過信號(hào)求和器獲得。但對(duì)于質(zhì)量大、質(zhì)心高或尺寸大的被試品,除了分析軸向力外,同時(shí)還要計(jì)算彎矩及扭矩大小。
1.4 力限譜的制定
力限試驗(yàn)條件同時(shí)包含加速度譜和力譜,由于實(shí)際中缺少振動(dòng)環(huán)境中被試品在實(shí)際飛行振動(dòng)中接口界面力的實(shí)測(cè)數(shù)據(jù),因此目前力譜主要基于加速度譜制定[7,8]。常見的力譜制定方法包括半經(jīng)驗(yàn)法、簡(jiǎn)單的二自由度法、復(fù)雜二自由度法、準(zhǔn)靜態(tài)載荷法等,本試驗(yàn)研究中,采用半經(jīng)驗(yàn)法對(duì)力限譜進(jìn)行制定。
半經(jīng)驗(yàn)法中,對(duì)于正弦掃描試驗(yàn),力限值(F)與輸入加速度值(A)的力限方程如下:

式中:
C —無量綱經(jīng)驗(yàn)常數(shù);
M0—總質(zhì)量;
f —頻率;
fb—拐點(diǎn)頻率,一般為被試品的一階固有頻率;
n—正常數(shù),一般取值為1。
對(duì)于隨機(jī)振動(dòng)試驗(yàn),上述方程可表達(dá)為:

式中:
SFF—界面力功率譜密度(PSD);
SAA—輸入加速度功率譜密度;
C2— 一般情況下取值小于5。
2 力限試驗(yàn)的實(shí)施
本研究以某被試品罩體為試驗(yàn)對(duì)象,根據(jù)被試品及力傳感器接口,所設(shè)計(jì)的力限工裝如圖1所示,被試品安裝如圖2所示,加速度輸入控制點(diǎn)(三個(gè))位于下夾具上表面,力傳感器(四個(gè))固定在上下夾具之間,加速度響應(yīng)測(cè)量點(diǎn)粘貼在被試品側(cè)面(力傳感器附近)。
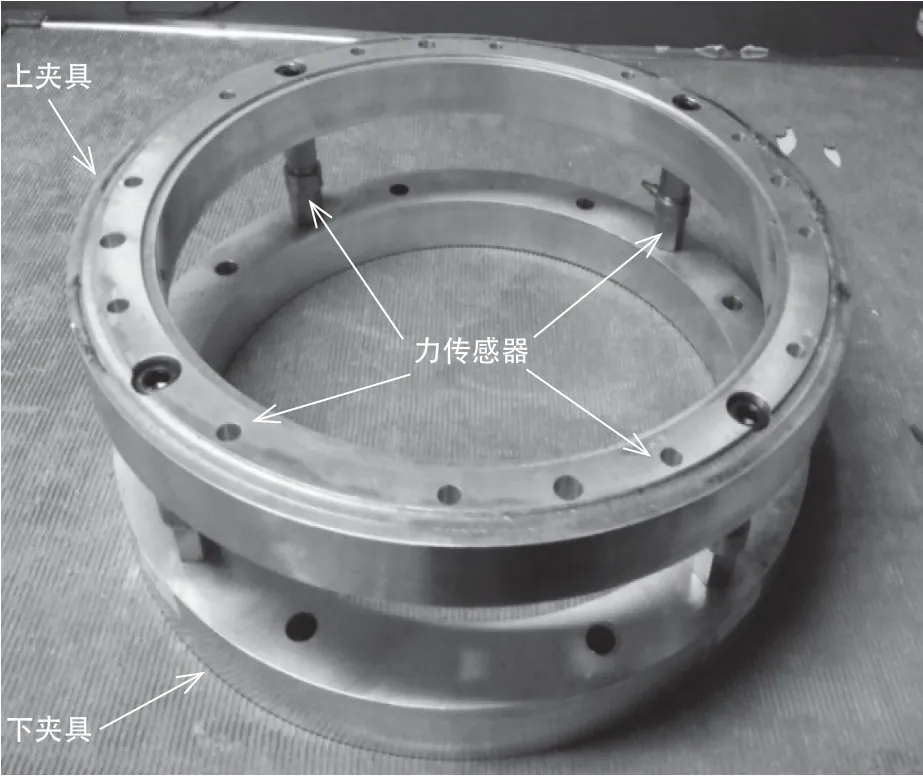
圖1 力限工裝與力傳感器連接圖
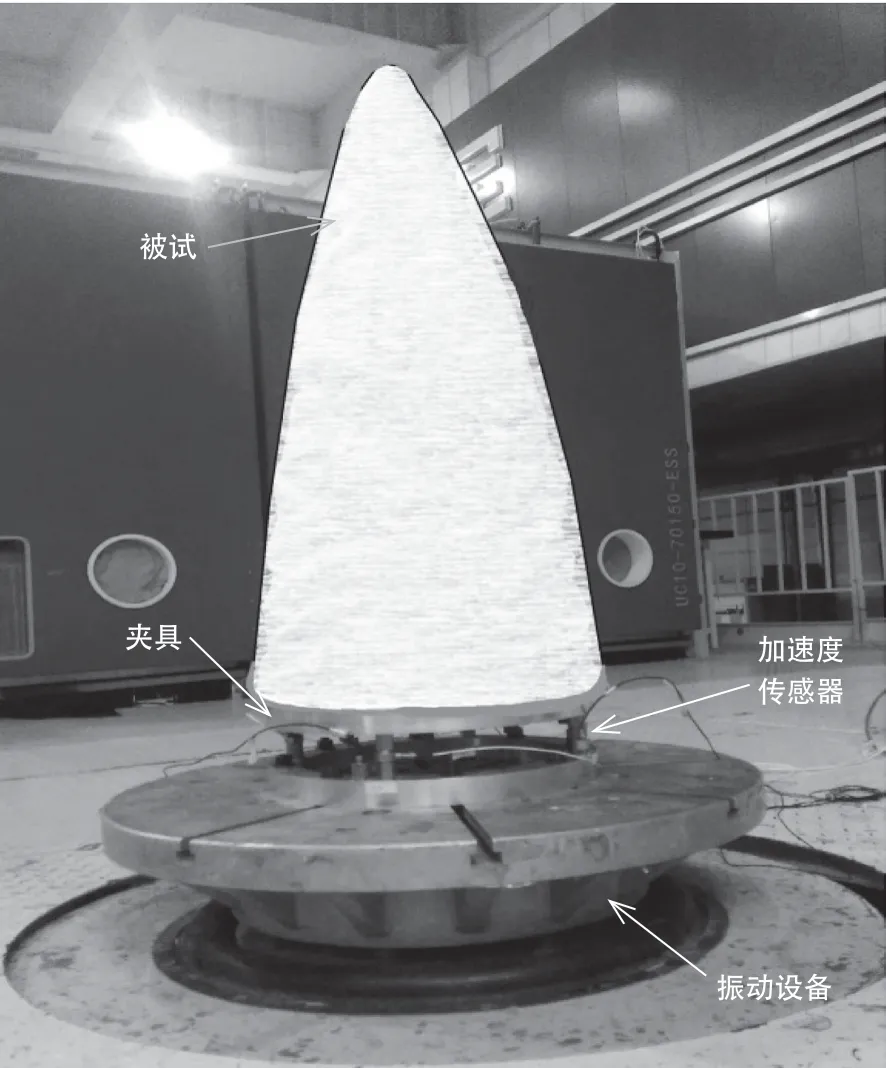
圖2 被試品安裝圖
本研究中經(jīng)驗(yàn)參數(shù)C及C2取值均為2.5,選取的正弦掃描及隨機(jī)振動(dòng)試驗(yàn)條件如表1所示。

表1 振動(dòng)試驗(yàn)條件
在上式(1)及式(2)中,fb/ f含義可理解為隨頻率的上升,力限值逐步的衰減,為簡(jiǎn)化操作,本研究在制定試驗(yàn)限制條件時(shí)未考慮該因素的影響。
被試品質(zhì)量(含上夾具質(zhì)量)為17 kg,根據(jù)公式(1)可得正弦掃描力限值為:

根據(jù)公式(2),隨機(jī)振動(dòng)力限值為:

同時(shí),作為對(duì)比研究,制定的正弦掃描加速度限制值為:

隨機(jī)振動(dòng)加速度譜密度限制為:

3 試驗(yàn)結(jié)果
本研究以加速度輸入作為控制,分別以加速度信號(hào)及力信號(hào)作為限制,得到的正弦掃描及隨機(jī)振動(dòng)試驗(yàn)結(jié)果如下。
3.1 正弦掃描試驗(yàn)結(jié)果
采用加速度控制、加速度響應(yīng)限制的方法,得到控制曲線及各點(diǎn)響應(yīng)曲線如圖3所示。
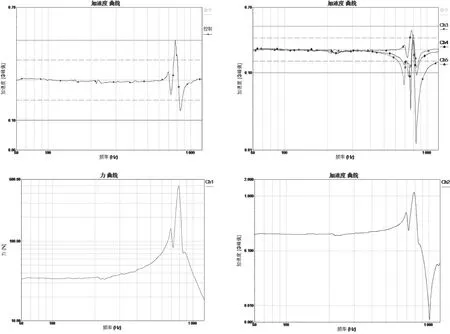
圖3 控制及各點(diǎn)響應(yīng)曲線
由圖3可知,在加速度控制及加速度限制情況下,在頻率為793.5Hz的共振點(diǎn)處,加速度放大因子Q加=1.119/0.2=5.59,力放大因子Q力=491/34=14.44,由此可見,在同樣的振動(dòng)輸入下,Q力值是Q加值的兩倍多,由此可見,力信號(hào)對(duì)共振頻率更為敏感。
采用加速度控制、力響應(yīng)限制的方法,得到控制曲線及各點(diǎn)響應(yīng)曲線如圖4所示。
由圖4可以看出,在加速度控制及力限制情況下,在頻率為793.5 Hz的共振點(diǎn)處,加速度放大因子Q加=0.5597/0.2=2.80,力放大因子Q力=234.4/34 =6.84,加速度及力響應(yīng)都得到較大的抑制,相對(duì)于加速度限制,此時(shí)控制曲線被限制較為明顯,出現(xiàn)了明顯下凹。
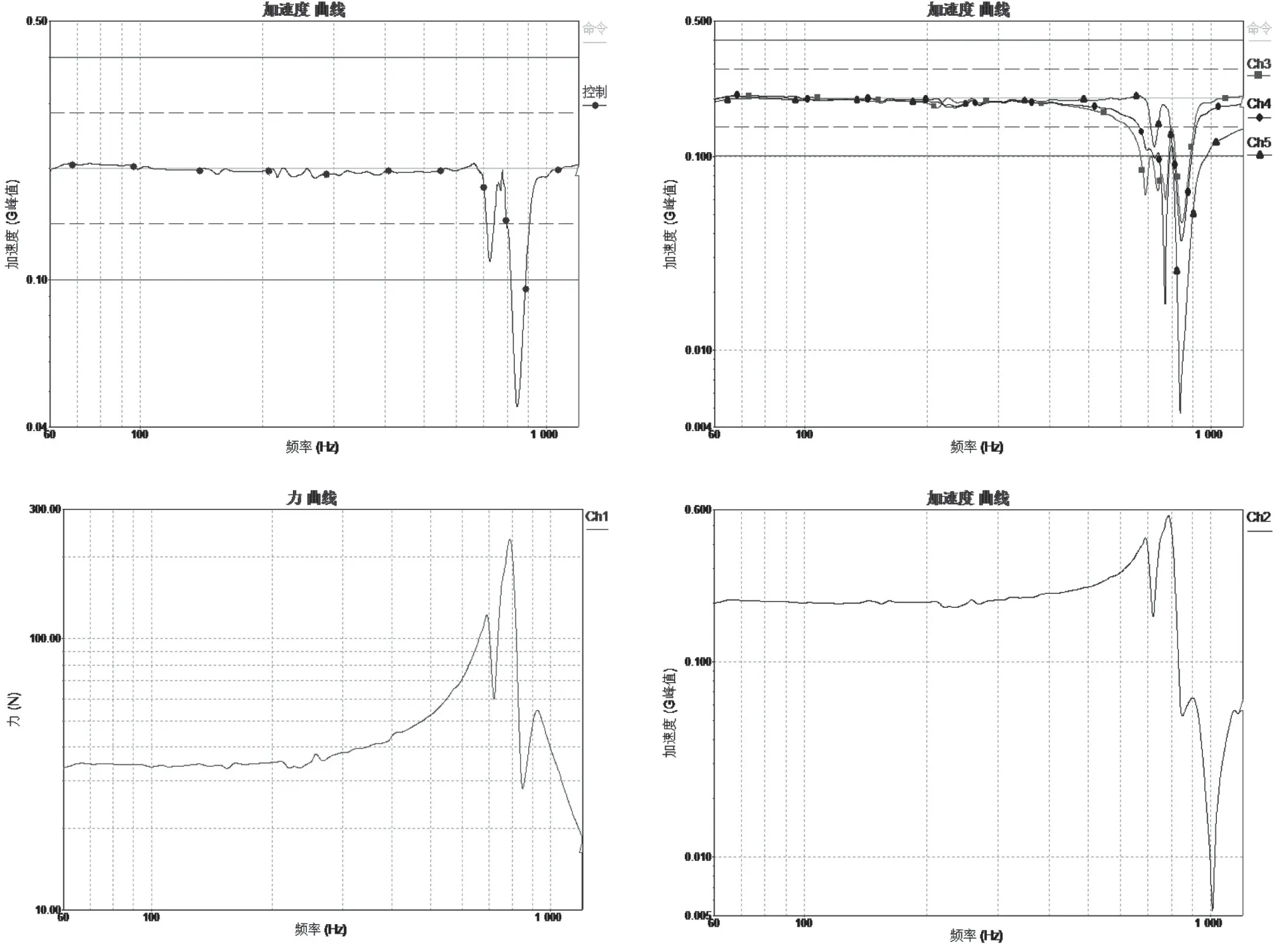
圖4 控制及各點(diǎn)響應(yīng)曲線
3.2 隨機(jī)振動(dòng)試驗(yàn)結(jié)果
采用三點(diǎn)加速度輸入作為控制,并以被試品上的一點(diǎn)加速度響應(yīng)作為限制,得到各點(diǎn)加速度及力響應(yīng)曲線見圖5;同樣采用三點(diǎn)加速度輸入作為控制,以力信號(hào)作為限制,得到各點(diǎn)加速度及力響應(yīng)曲線見圖6。
由圖5可以看出,在加速度限制條件下,在被試品一階共振頻率處,力信號(hào)功率譜密度放大Q力= 15000/578=25.95,加速度功率譜密度放大Q加= 0.055/0.02=2.75;同時(shí),由圖6可以看出,在力限制條件下,力信號(hào)功率譜密度放大Q力=2000/578=3.46,加速度功率譜密度被抑制下凹,并沒有發(fā)生共振。對(duì)比圖5及圖6可知,在有限制的情況下,在被試品共振點(diǎn)處,加速度及力信號(hào)均得到較大的抑制,但力限制時(shí)被試品共振的抑制程度要比加速度限制時(shí)更為嚴(yán)酷。
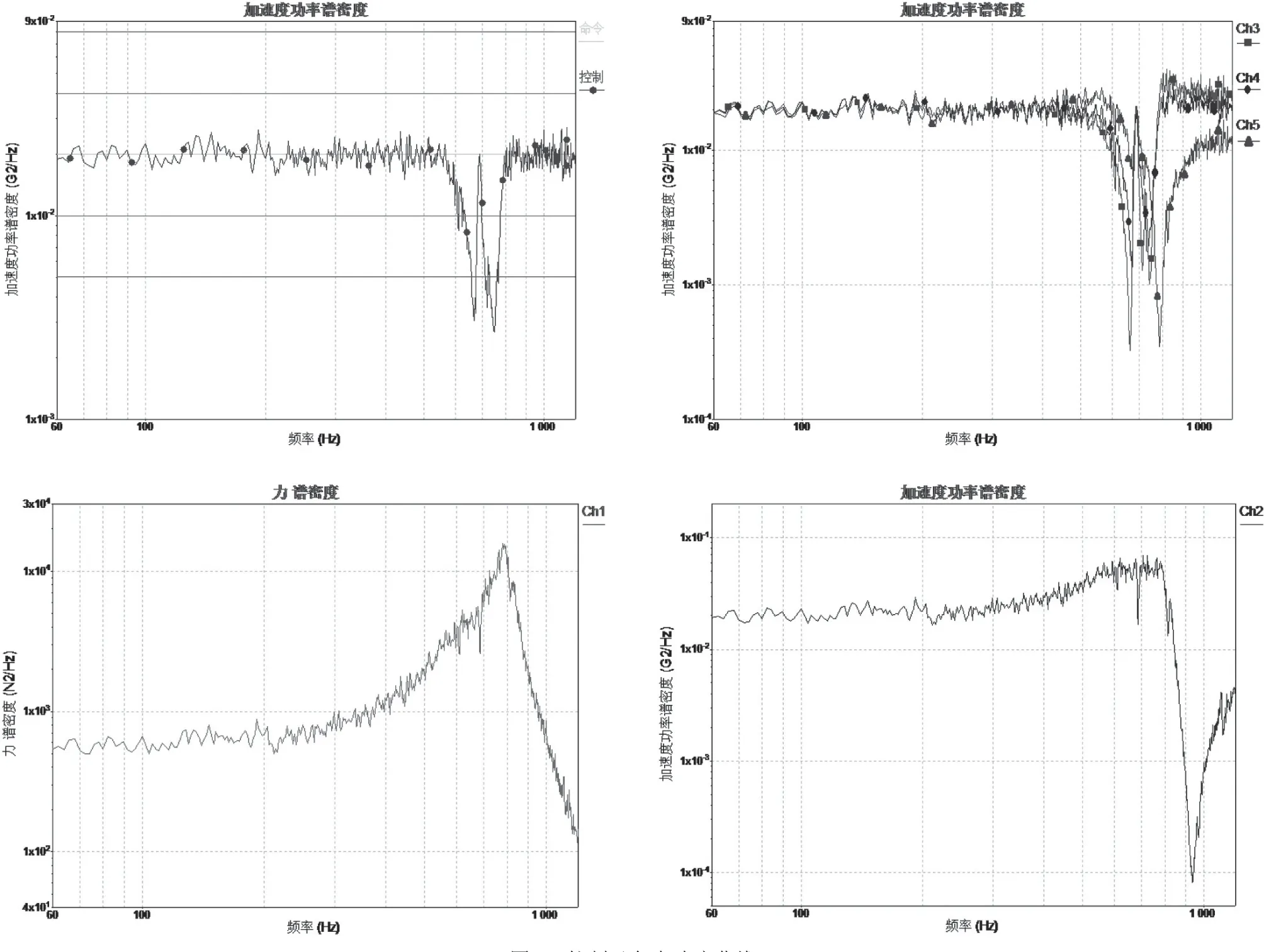
圖5 控制及各點(diǎn)響應(yīng)曲線

圖6 控制及各點(diǎn)響應(yīng)曲線
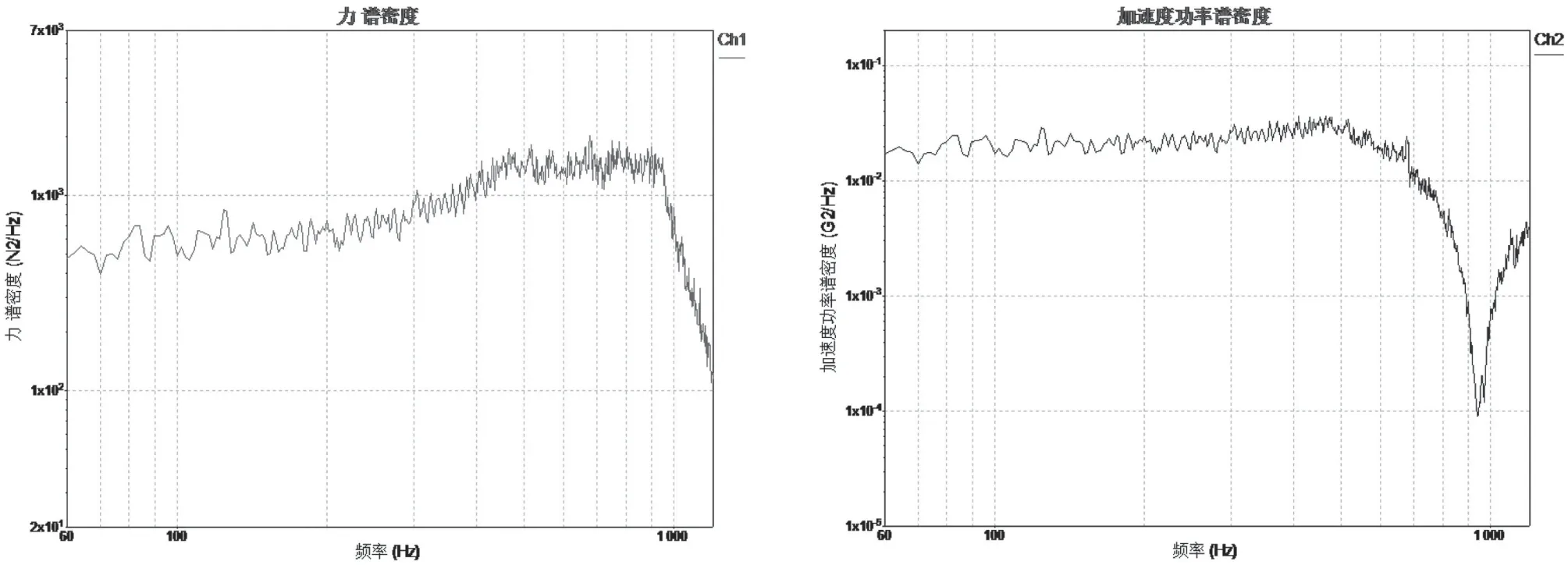
圖6 控制及各點(diǎn)響應(yīng)曲線(續(xù))
4 分析與總結(jié)
總結(jié)以上各種試驗(yàn)情況,試驗(yàn)結(jié)果歸納總結(jié)如表2所示。
由表2可以看出,無論是正弦掃描還是隨機(jī)振動(dòng),在以加速度信號(hào)輸入作為控制的情況下,以加速度信號(hào)作為限制時(shí),在被試品一階固有頻率處的放大現(xiàn)象被輕度抑制,而以力信號(hào)作為限制時(shí),在被試品一階固有頻率處的放大現(xiàn)象被抑制較為明顯,甚至使控制曲線出現(xiàn)下凹。
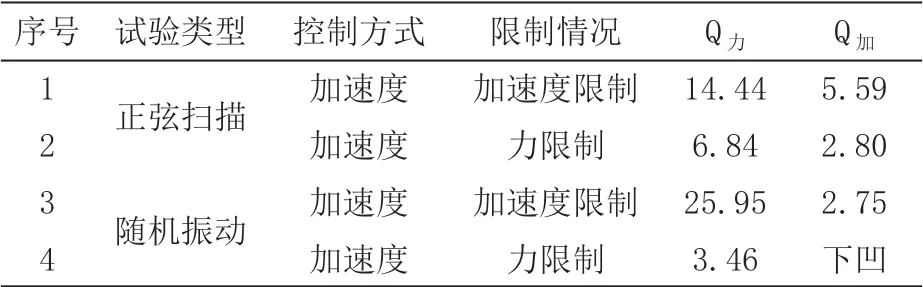
表2 各試驗(yàn)狀態(tài)下被試品一階固有頻率處力及加速信號(hào)Q值
分析可知,有以下兩方面的原因:
1)由于界面處的加速度信號(hào)比較小,因此對(duì)噪聲信號(hào)比較敏感,因而加速度控制的信噪比往往比較低;而界面處的力信號(hào)相對(duì)比較大(與被試品質(zhì)量有關(guān)),對(duì)環(huán)境噪聲不太敏感,因而具有較大的信噪比;
2)由于被試品在共振頻率附近,加速度信號(hào)受被試品吸振效應(yīng)影響較大,而力信號(hào)則受吸振效應(yīng)影響較小,因此使用力信號(hào)進(jìn)行限制,可以更好的控制振動(dòng)的過試驗(yàn)問題。
因此,在被試品的一階頻率附近,力限控制試驗(yàn)的控制效果要優(yōu)于加速度控制,可以有效減輕被試品的過試驗(yàn)問題。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
當(dāng)代陜西(2020年13期)2020-08-24 08:22:02
電子制作(2018年11期)2018-08-04 03:25:42
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
制造技術(shù)與機(jī)床(2017年5期)2018-01-19 02:49:17
濰坊學(xué)院學(xué)報(bào)(2016年2期)2016-12-01 13:00:11
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
