垃圾智能分類工作平臺的設計
2022-01-19 09:03:42齊新霞黃栩鴻張睿鵬王瀟宜黃寶瑩林詩潔
科技與創新 2022年1期
齊新霞,黃栩鴻,張睿鵬,王瀟宜,黃寶瑩,鐘 玥,林詩潔
(北京理工大學珠海學院,廣東 珠海519088)
現有市場的智能垃圾桶還是需要人工將垃圾分類,再倒入相應垃圾桶,大量消耗人力、物力、財力,不能真正意義上實現垃圾的智能分類,并且大都為方形垃圾桶,相對本設計占地面積較大,不可能在居民家庭中得到應用[1-2]。針對目前居民對于垃圾分類意識淡薄,不知道如何正確區分垃圾種類的問題以及居民家庭用類垃圾桶現狀,本文進行了垃圾智能分類工作平臺的設計,本設計的工作平臺包括桶蓋、桶身和底座三個部分,能實現完全無接觸地對垃圾進行精準分類。本設計的爆炸圖如圖1所示。
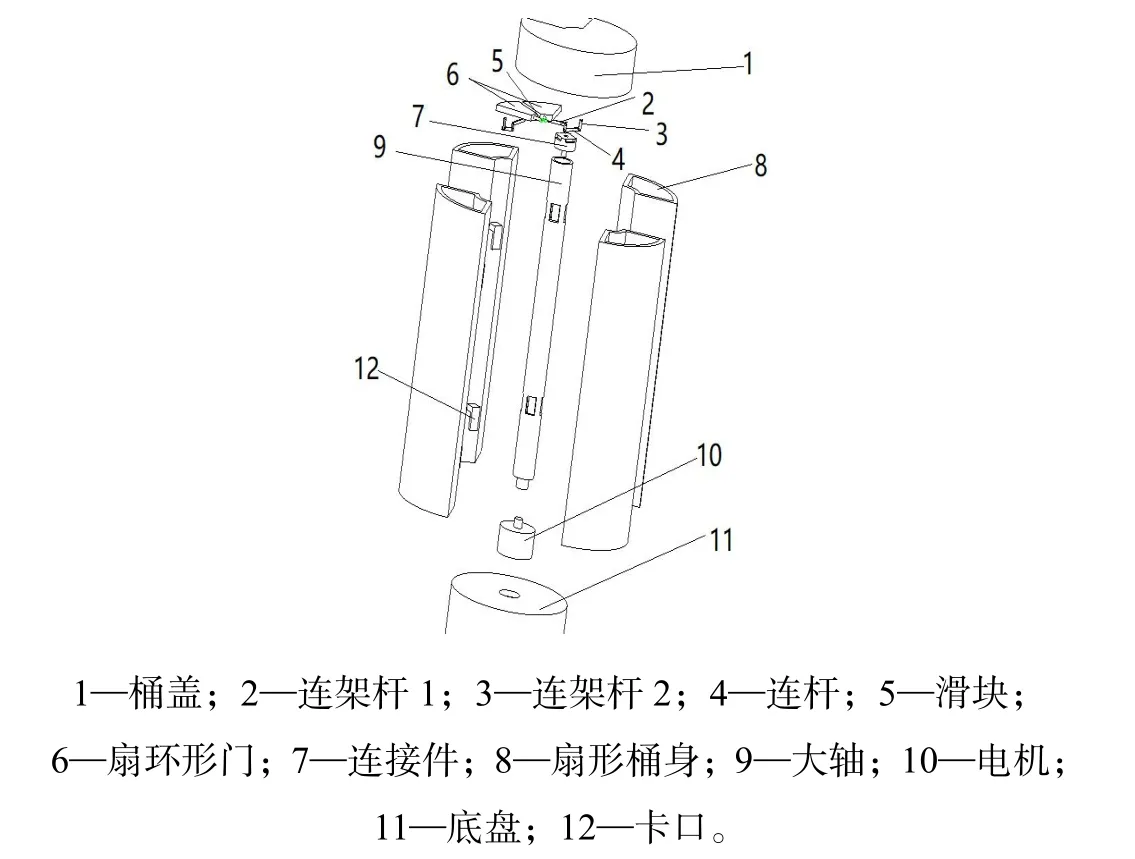
圖1 垃圾智能分類工作平臺爆炸圖
1 桶蓋的設計
本設計的桶蓋包括圖1~圖4所示的2個四桿機構、2個扇環形門、2個小舵機(如圖3所示的電機1和電機2)、2個滑塊、2根小軸、1個V形槽及連接卡槽。其中圖4所示桶蓋底部的中心所設的一個連接卡槽是桶蓋與桶身的連接關鍵[3]。
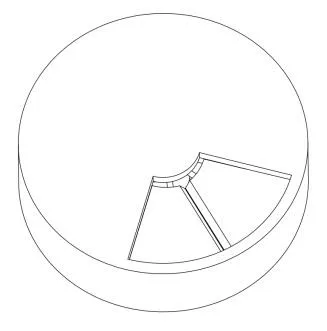
圖2 工作平臺上表面
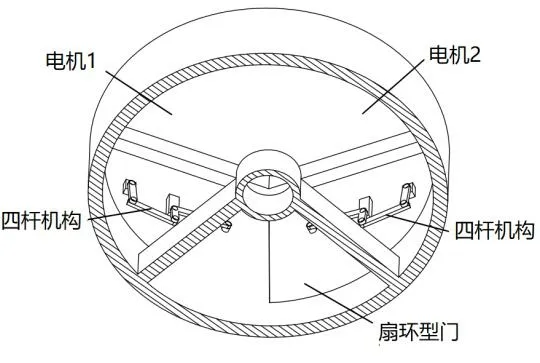
圖3 工作平臺桶蓋內部結構
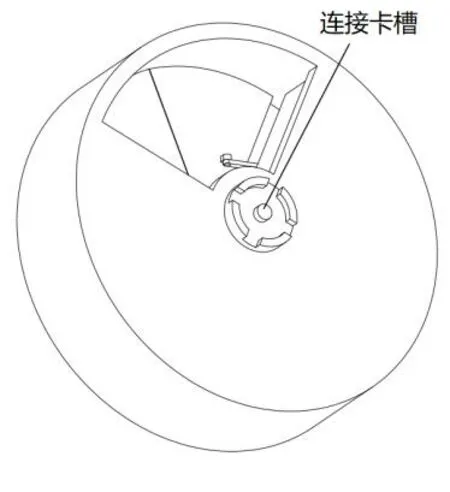
圖4 桶蓋總體圖(底面)
1.1 扇環形門的設計
本設計的2個扇環形門由鋁合金材料制作成,扇環門安裝在兩根伸出的小軸上,并位于四桿機構上部,兩個扇環門關閉時的平面低于工作平臺上表面,所低的高度為扇環門的厚度,扇環門通過伸出小軸與滑塊配合,滑塊又與V形槽配合實現固定或控制扇環門的開關角度,其開放最大角度為90°。兩個扇環門連接處設計為斜面交錯嚙合結構,目的是防止兩個扇環門向下側翻運動時產生交錯或磨損,扇環門底面上分別焊接一個套環,該套環通過銷釘與四桿機構連接,通過電機帶動四桿機構運動,又分別推動扇環門與兩根小軸一起旋轉,實現扇環門的開閉[4]。如圖5所示。
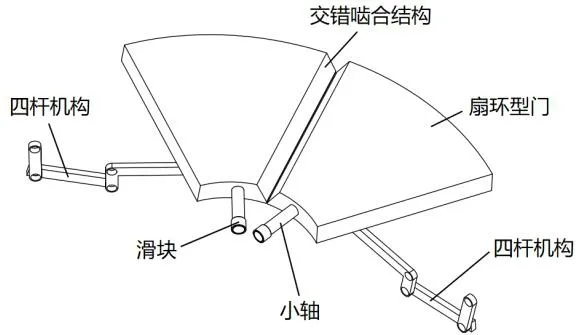
圖5 扇環形門
1.2 小軸、滑塊的設計
本設計的伸出扇環門的小軸由鋁合金材料制成,每個扇環門上各有1根小軸,小軸一端與扇環門焊接連接,另一端通過滑塊連接到桶蓋下面的V形槽內。
本設計的滑塊共有2個,滑塊是由鋁合金材料制成的空心圓柱塊,滑塊與扇環門上的小軸為過盈配合,并隨扇環門和小軸一起,以同樣的速度和角度轉動。滑塊嵌在V形槽內,并以V形槽內為運動軌道,在四桿機構帶動下隨扇環門和小軸一起運動,實現固定與控制扇環門的開關角度。
1.3 四桿機構的設計
本設計的2個四桿機構分別安裝在桶蓋的下部,它的一端安裝在扇環門底面上,另一端通過聯軸器與電機連接。圖1所示四桿機構的連架桿1通過小小軸與扇環門底面套環連接,小小軸與套環及連架桿1均為過盈配合。連架桿2通過聯軸器與電機連接。考慮到扇環門壽命及其開閉穩定性,將連架桿1設計為三角形結構。市面上購買的2個電機型號一致的電機1和電機2分別安裝在圖3所示位置,通過圖3所示傳動路線控制四桿機構運動,實現2個扇環門的開閉。本設計的四桿機構的組成零件均為不銹鋼件。
1.4 V形槽和鏈接卡槽的設計
本設計的V形槽和鏈接卡槽均由不銹鋼材料制成,V形槽與桶蓋底面焊接連接,其作用是使滑塊嵌入其中,滑塊隨著扇環門一起在四桿機構推動下運動,滑塊在V形槽內按照預期運動軌跡運動,實現扇環門開閉,其裝配如圖6所示。圖4所示的連接卡槽與桶蓋底面焊接連接,連接卡槽通過連接件與大軸上端連接,該裝置的作用是連接大軸和桶蓋。
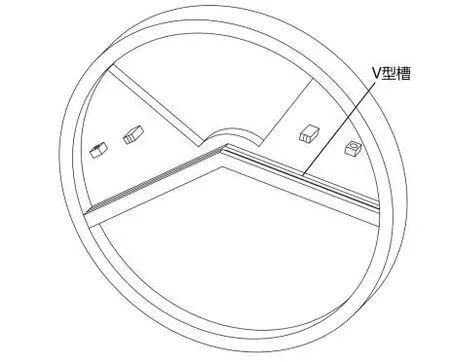
圖6 V形槽裝配圖
2 桶身的設計
本設計的桶身由連接件、大軸和4個扇環形桶身(對4種垃圾分類)組成,如圖7所示。
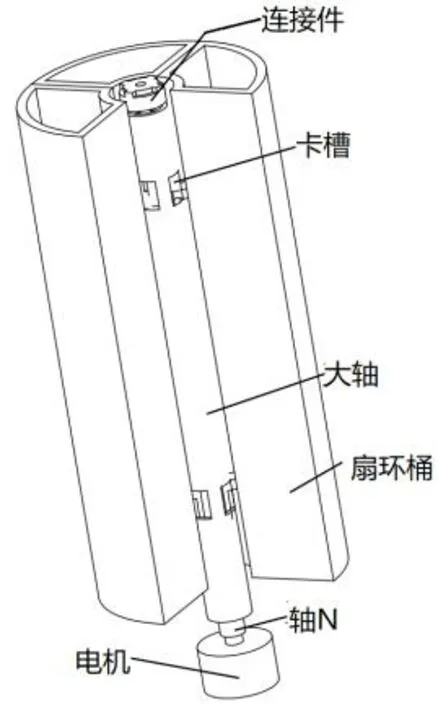
圖7 3/4桶身裝配圖
2.1 連接件的結構設計
圖8 所示的連接件由不銹鋼材料制成,用于桶蓋與大軸之間的連接,連接件上方的卡槽與桶蓋下方的連接卡槽相互鎖緊,使桶蓋和連接件連成一體,實現對4個扇形桶身的加蓋作用。連接件下面通過軸承與大軸上端相連,軸承直接裝入連接件下面伸出的軸M的外面,軸承與連接件為過盈配合,工作過程中該軸承外圈旋轉,內圈不轉。此設計便于對桶蓋拆卸及清理衛生。最終使桶蓋與大軸連成一個整體,大軸帶動4個扇環形垃圾桶身運轉,連接件和桶蓋均不運動[5]。
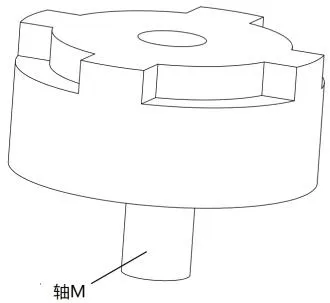
圖8 連接件
2.2 大軸的設計
本設計的大軸由不銹鋼材料制成,大軸上1/4和下1/4外的高度處,分別均勻分布有4個(或多個)卡槽,如圖7所示。該卡槽用于與扇環桶的連接配合,以保證將扇環桶鎖緊在大軸上,讓大軸帶動扇環桶一起旋轉。大軸上端通過軸承與連接件連接,該大軸套在軸承外圈上,二者為過盈配合,大軸下端裝有一個軸N,大軸和軸N為過盈配合,聯軸器將軸N和電機軸連接起來,實現電機帶動大軸旋轉[6]。
2.3 扇環桶的設計
本設計的扇環桶由不銹鋼材料制成,扇環形桶的橫截面為扇環結構,本設計共有4個扇環桶,如圖7、圖9所示。扇環桶的上1/4和下1/4外的高度處分別焊接有圖1所示的2個卡扣,卡扣對稱焊接在其小扇形面上;安裝扇環桶時將卡扣卡入大軸卡槽,即可實現大軸與扇環桶連接及旋轉。
垃圾被投放在扇環形門上面后,被自動識別,控制系統依據識別結果指令給運轉系統,運轉系統將對應的扇環垃圾桶旋轉至扇環形門下方,桶蓋上的2個扇環形門打開,垃圾自由落入對應的扇環形垃圾桶內,完成垃圾自動分類裝桶。垃圾自動識別是依據大數據,采用成熟技術。桶身如圖9所示。
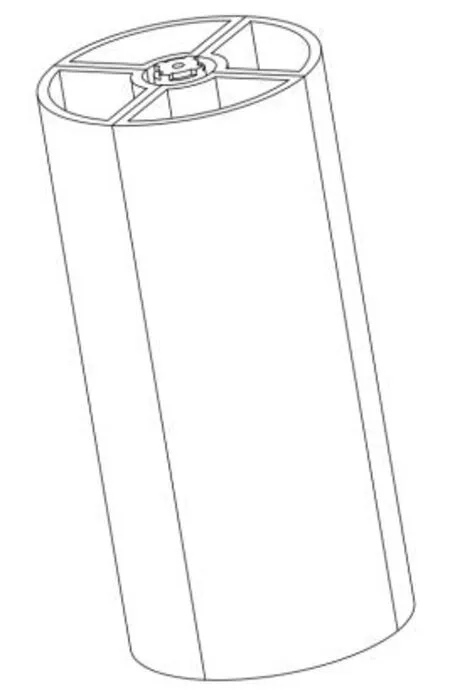
圖9 桶身整體
3 底座的設計的設計
本設計的底座由基座和電機組成。基座用于支撐整個智能分類垃圾工作平臺及垃圾的質量。
基座由45鋼材料制成,基座上層面的大孔與大軸有2~5 mm的間隙,即大軸穿過大孔與如圖10所示的電機連接。大軸的下表面與基座中間層的上表面間有2~5 mm的間隙。大軸下端的軸N與電機的軸通過聯軸器連接,聯軸器和軸N及電機的一部分軸均穿過基座的小孔,聯軸器與小孔之間有2~5 mm的間隙,這樣的設計可以確保大軸及其運轉的穩定[7]。
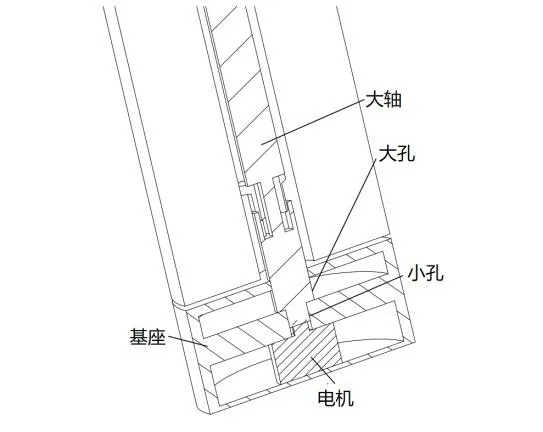
圖10 底座及大軸裝配圖
本設計的底座電機根據平臺及垃圾的質量選擇型號ZGA37RG的普通電機。本設計的垃圾智能分類工作平臺工作時,人將垃圾放在扇環形門上面,大數據識別垃圾后,普通電機帶動大軸旋轉,大軸又帶動桶身旋轉,即承裝相應垃圾的扇環桶,轉到扇環形門下面,此時圖3的電機1和電機2旋轉并由四桿機構帶動扇環形門旋轉,垃圾隨扇環形門開啟落入對應垃圾桶內,實現間歇接受垃圾,達到智能分類的目標。
4 結論
本設計解決了人們目前無法正確對垃圾進行智能分類的難題,可以實現垃圾智能分類收集。生活垃圾妥善分類處理,能大大減少從業人員數量及工作時間,減輕城市垃圾處理的壓力,并讓各種垃圾獲得妥善處置,對垃圾綜合利用及資源化無害化處理均有益。
本設計的“垃圾分類智能工作平臺”不僅結構設計創新,還實現對源頭垃圾進行分類,開啟了利用智能+與垃圾分類相結合的垃圾分類新模式,而且在垃圾分類“減量化、無害化、資源化”方面是一個身體力行的操作過程的創新。
本設計是構建有效垃圾分類體系,實現垃圾源頭分類的目標,共享智慧社會、智慧生活的紅利的基礎。
猜你喜歡
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
藝術啟蒙(2018年7期)2018-08-23 09:14:18
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16