含滑動(dòng)節(jié)點(diǎn)索結(jié)構(gòu)體系分析方法研究*
2022-01-24 10:46:40劉學(xué)武侯亞委李慶建
施工技術(shù)(中英文) 2021年20期
關(guān)鍵詞:結(jié)構(gòu)
劉學(xué)武,李 博,侯亞委,李慶建
(華電重工股份有限公司,北京 100070)
0 引言
索在結(jié)構(gòu)工程中扮演著非常重要的角色,如索道、懸索結(jié)構(gòu)和斜拉結(jié)構(gòu)等中拉索均為非常活躍的單元[1]。拉索連接節(jié)點(diǎn)在工程應(yīng)用中可分為2種形式:①不滑動(dòng)節(jié)點(diǎn),即索與索或索與構(gòu)件之間的連接為“死結(jié)”,不會(huì)產(chǎn)生相對滑移,如索網(wǎng)結(jié)構(gòu)和索桿結(jié)構(gòu)等節(jié)點(diǎn);②索在節(jié)點(diǎn)處可產(chǎn)生相對滑移,如索道中跑車滑輪與索之間可產(chǎn)生相對滑移。含滑動(dòng)節(jié)點(diǎn)索結(jié)構(gòu)體系的受力特點(diǎn)為:由某一初始位形釋放結(jié)構(gòu)體系,結(jié)構(gòu)體系在不平衡力系作用下最終達(dá)到平衡狀態(tài)及幾何姿態(tài),且有時(shí)會(huì)伴有一定的結(jié)構(gòu)位移,受力具有雙重非線性,即索非線性及節(jié)點(diǎn)滑動(dòng)接觸的非線性,受力分析較復(fù)雜,難以精確模擬。
不滑動(dòng)索系結(jié)構(gòu)的分析相對簡單,國內(nèi)外很多學(xué)者對索單元進(jìn)行研究,但對含滑動(dòng)節(jié)點(diǎn)索結(jié)構(gòu)體系模擬分析方法的研究相對較少。若采用現(xiàn)有有限元軟件中的接觸算法可得到有效求解,但非常繁瑣。文獻(xiàn)[2]提出一種有效的滑移索單元法,但需求解復(fù)雜的滑移剛度矩陣;文獻(xiàn)[3]建立了一種考慮索滑移算法,但在求解各索段原長時(shí)采用了不考慮彈性的索長計(jì)算公式;文獻(xiàn)[4]建立了調(diào)整支點(diǎn)兩側(cè)索力的方法,但增加了滑移處索長的調(diào)整;文獻(xiàn)[5]提出了在中間節(jié)點(diǎn)處可自由滑動(dòng)的多跨連續(xù)索靜力平衡的算法;文獻(xiàn)[1]通過虛加溫度荷載方法來調(diào)整滑輪兩側(cè)索段原長,使兩側(cè)索力相等,但在求解多滑輪組問題時(shí)算法收斂困難;文獻(xiàn)[6]提出一種三節(jié)點(diǎn)摩擦滑移索單元;文獻(xiàn)[7]在處理荷載緩和體系時(shí),提出了能量搜索法和動(dòng)力松弛法,但只能處理索端張力已知的問題。
然而,上述方法并不能考慮在可滑動(dòng)支座處,滑輪或鞍座半徑對索受力狀態(tài)的影響。Mcdonald等[8]借助索和滑輪相互作用中的4個(gè)獨(dú)立內(nèi)變量建立了一種單元,可模擬索在由1個(gè)鏈桿連接的滑輪上的滑動(dòng)。借鑒該方法,魏建東[9]建立了索在滑輪上滑動(dòng)模擬的滑移索單元,同時(shí)魏建東等[10]建立了滑輪在索上行走分析的索-滑輪單元。本文將上述單元統(tǒng)稱為滑移索單元,其求解方法與常規(guī)有限元法相同,便于應(yīng)用。本文進(jìn)一步對滑移索單元進(jìn)行探討,構(gòu)建滑移索單元高效求解的延拓牛頓法,給出索結(jié)構(gòu)體系精確分析方法,編制相應(yīng)的有限元分析程序,為實(shí)際工程的設(shè)計(jì)和施工提供可靠分析手段。
1 滑移索單元
滑移索單元[8-10]為一個(gè)平面三節(jié)點(diǎn)單元,3個(gè)節(jié)點(diǎn)分別為索兩端點(diǎn)I(xI,yI),J(xJ,yJ)及滑輪中心點(diǎn)K(xK,yK),每個(gè)節(jié)點(diǎn)有2個(gè)自由度ux,uy,相應(yīng)節(jié)點(diǎn)力分別為Fx,F(xiàn)y。索采用懸鏈線模型,索和滑輪之間可產(chǎn)生相互滑移,設(shè)3個(gè)節(jié)點(diǎn)的坐標(biāo)、位移和力列陣分別為Xe,ue和Fe。
滑移索單元在給定節(jié)點(diǎn)I,J之間索原長的情況下,利用4個(gè)內(nèi)變量V1~V4即可確定其幾何形狀,設(shè)其組成內(nèi)變量矢量Ve。
對于滑移索單元,通過直接建立節(jié)點(diǎn)力和位移的增量方程來推導(dǎo)單元?jiǎng)偠染仃囕^困難。文獻(xiàn)[8-10]通過內(nèi)變量建立單元節(jié)點(diǎn)力和位移之間的關(guān)系,進(jìn)而可獲得單元?jiǎng)偠染仃嚕茖?dǎo)基本過程如下。
1)選擇單元內(nèi)變量Ve。
4)聯(lián)立單元節(jié)點(diǎn)力和位移分別與內(nèi)變量之間的增量方程,得到單元增量控制方程ΔFe=KeΔue及切線剛度矩陣Ke=MN。
實(shí)際工程索結(jié)構(gòu)中存在的滑動(dòng)節(jié)點(diǎn)及其對應(yīng)的滑移索單元類型可分為3種:①滑移索單元Ⅰ型 索懸掛在滑輪上;②滑移索單元Ⅱ型 滑輪在索上行走;③滑移索單元Ⅲ型 索與滑輪在側(cè)面接觸。
滑移索單元Ⅰ型內(nèi)變量和節(jié)點(diǎn)力分別如圖1,2所示。滑移索單元Ⅰ型4個(gè)內(nèi)變量的物理意義分別為[8-10]:V1為左索段在滑輪脫離點(diǎn)A處的張力,V2為從豎直方向逆時(shí)針繞滑輪中心點(diǎn)K旋轉(zhuǎn)到左索段脫離點(diǎn)A的角度,V3為從豎直方向順時(shí)針繞滑輪中心點(diǎn)K旋轉(zhuǎn)到右索段脫離點(diǎn)B的角度,V4為左索段節(jié)點(diǎn)I,A之間無應(yīng)力原長。這些內(nèi)變量的選擇不是唯一的,但利用其推導(dǎo)的公式形式最為簡單。
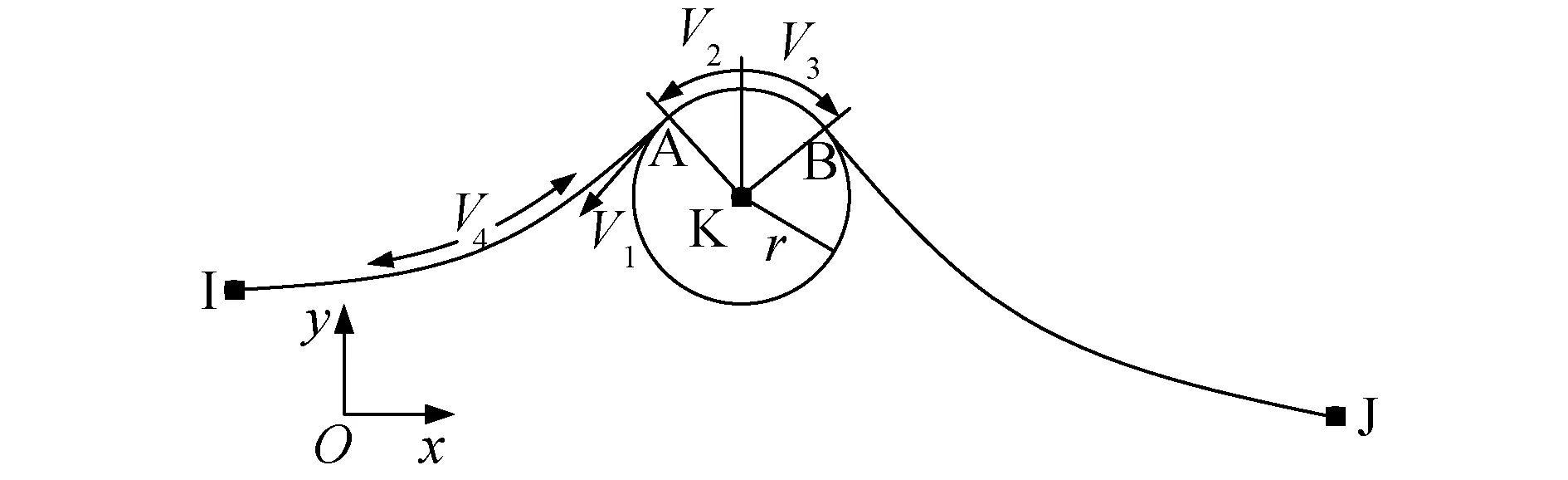
圖1 滑移索單元Ⅰ型內(nèi)變量
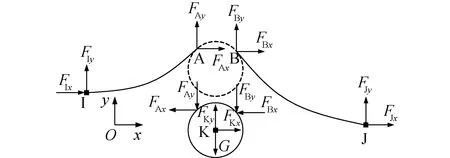
圖2 滑移索單元Ⅰ型節(jié)點(diǎn)力
滑移索單元Ⅱ型內(nèi)變量和節(jié)點(diǎn)力分別如圖3,4所示。滑移索單元Ⅱ型4個(gè)內(nèi)變量物理意義分別為[8-10]:V1為左索段在滑輪脫離點(diǎn)A處的張力;V2為從豎直方向順時(shí)針繞滑輪中心點(diǎn)K旋轉(zhuǎn)到左索段脫離點(diǎn)A的角度,V3為從豎直方向逆時(shí)針繞滑輪中心點(diǎn)K旋轉(zhuǎn)到右索段脫離點(diǎn)B的角度,V4為左索段節(jié)點(diǎn)I,A之間無應(yīng)力原長。
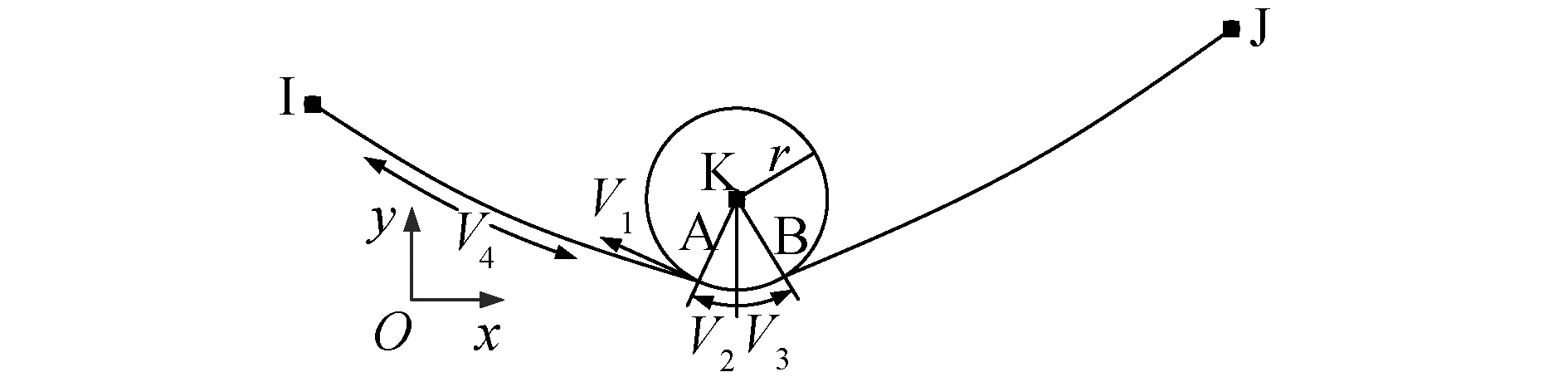
圖3 滑移索單元Ⅱ型內(nèi)變量
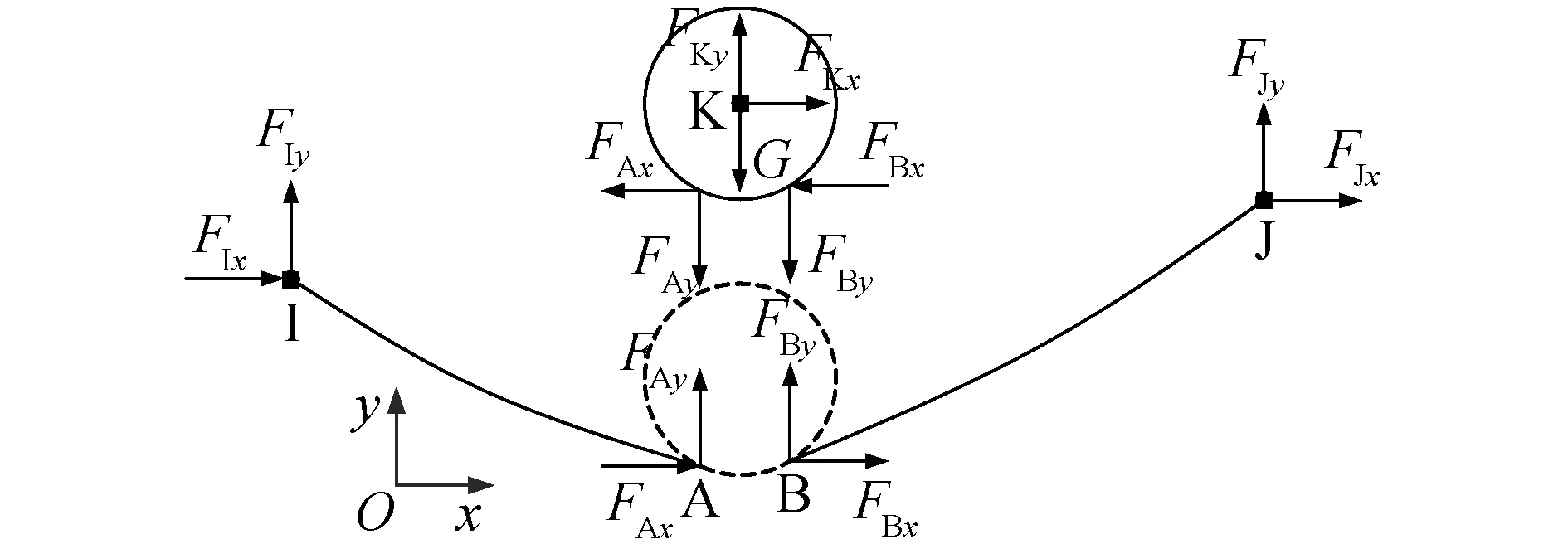
圖4 滑移索單元Ⅱ型節(jié)點(diǎn)力
滑移索單元Ⅲ型內(nèi)變量如圖5所示。滑移索單元Ⅲ型4個(gè)內(nèi)變量的物理意義分別為[8-10]:V1為下索段在滑輪脫離點(diǎn)A處的張力,V2為從水平方向順時(shí)針繞滑輪中心點(diǎn)K旋轉(zhuǎn)到下索段脫離點(diǎn)A的角度,V3為從水平方向逆時(shí)針繞滑輪中心點(diǎn)K旋轉(zhuǎn)到上索段脫離點(diǎn)B的角度,V4為下索段節(jié)點(diǎn)I,A之間無應(yīng)力原長。
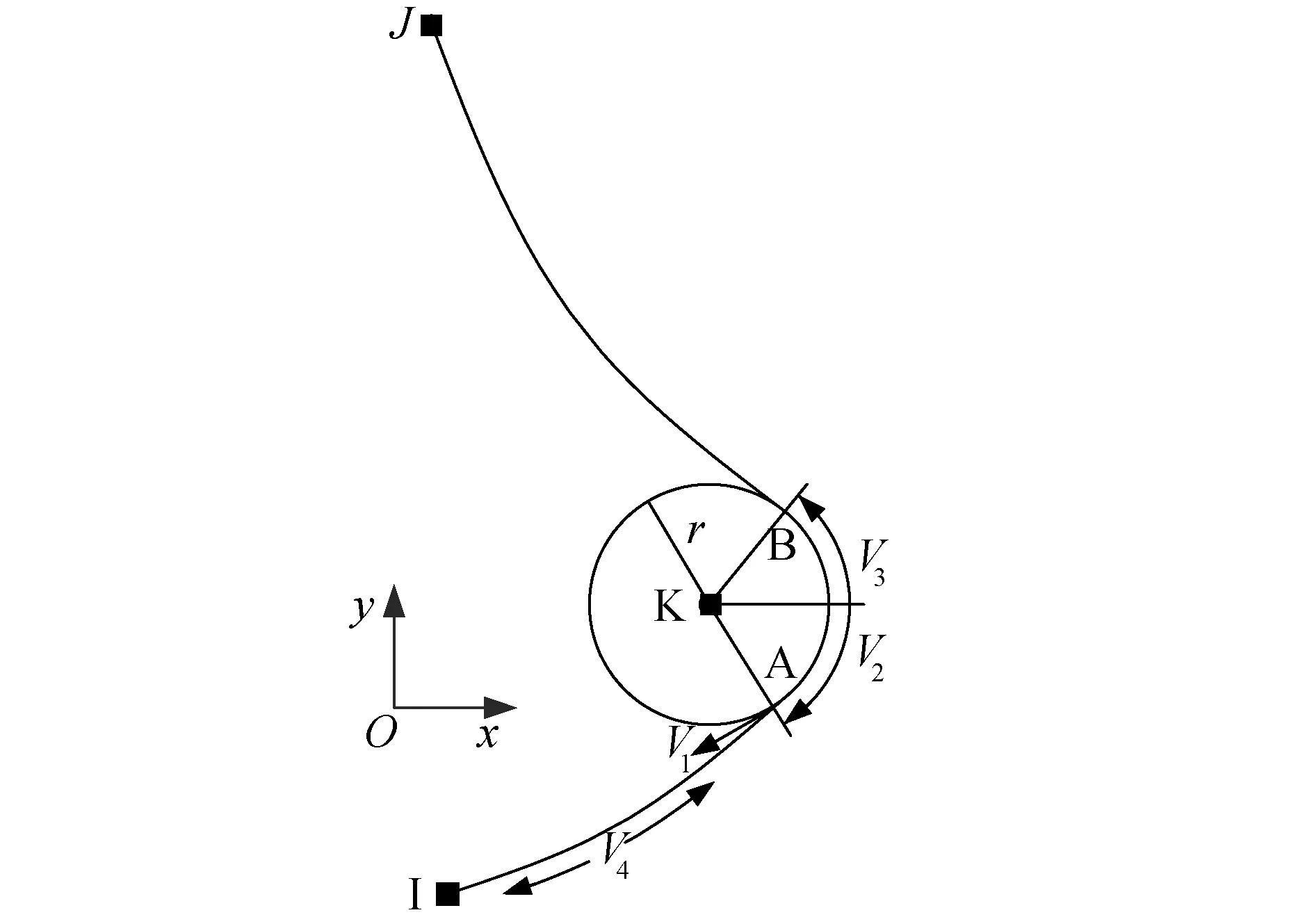
圖5 滑移索單元Ⅲ型內(nèi)變量
3類單元異同如下。
1)不同點(diǎn) ①描述的物理現(xiàn)象不同,其中滑移索單元Ⅰ型描述的是索在滑輪上的滑移,滑移索單元Ⅱ型描述的是滑輪在索上的行走,滑移索單元Ⅲ型描述的是索在滑輪一側(cè)滑移;②三類單元中表述內(nèi)變量的坐標(biāo)系不同。
2)相同點(diǎn) ①單元構(gòu)成相同,都是由1個(gè)滑輪和1段索組成;②單元受力機(jī)理相同,都是描述了索與滑輪之間的相互摩擦滑移;③從數(shù)學(xué)計(jì)算上來說,3類單元相同,具有通用性。
以下對3類單元通用性進(jìn)行研究。取1段索懸掛在1個(gè)滑輪上的簡單結(jié)構(gòu)體系(見圖1),索兩端和滑輪中心點(diǎn)固定,3個(gè)節(jié)點(diǎn)分別為I(-22,0),J(22,0),K(0,15)。索原長Lu=53.15m,截面面積A=2.0×10-4m2,彈性模量E=2.0×1011N/m2,索重w=50N/m;滑輪重G=0,半徑r=0,摩擦效率e=1.0。采用3類單元確定體系平衡狀態(tài),結(jié)果如表1所示。
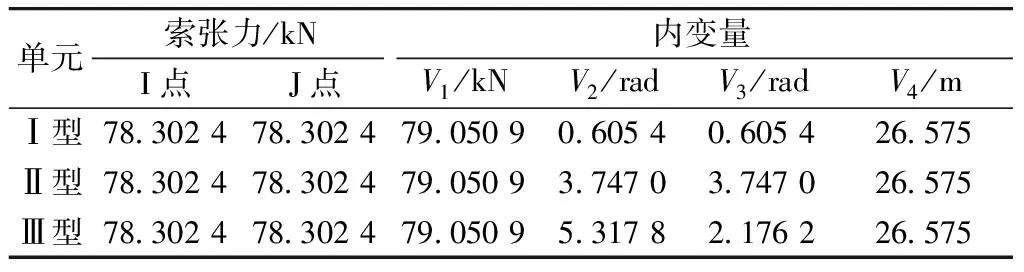
表1 3類單元索受力狀態(tài)
通過算例可發(fā)現(xiàn),3類單元分別求解同一個(gè)結(jié)構(gòu)得到索的受力狀態(tài)一致,只是單元內(nèi)變量結(jié)果不同,這是由3類單元各自內(nèi)變量坐標(biāo)系不同而導(dǎo)致的,說明這3類單元具有通用性。因此,在對索滑動(dòng)節(jié)點(diǎn)進(jìn)行模擬時(shí)可采用其中任意一種單元,只是迭代初值的選擇要與相應(yīng)單元類型內(nèi)變量的坐標(biāo)系相對應(yīng)。
2 單元求解方法
基于有限單元法,滑移索單元?jiǎng)偠染仃嚭凸?jié)點(diǎn)力的求解方法為:
3)由Ve可得到單元?jiǎng)偠染仃嘖e。
由于牛頓法局部收斂,只有初值與精確值足夠接近時(shí)才會(huì)迭代收斂。研究發(fā)現(xiàn),內(nèi)變量求解時(shí)其初值的選擇須謹(jǐn)慎,直接影響解的收斂性。為擴(kuò)大初值選擇范圍,構(gòu)造了內(nèi)變量求解的延拓牛頓法,基本思想為:先利用延拓法近似求解1個(gè)內(nèi)變量,以此作為牛頓法的迭代初值進(jìn)行求解,最終獲得收斂解。
延拓牛頓法[11]基本思想為:引入?yún)?shù)t,構(gòu)造1組映射H(x,t)代替單映射F(x),使得H滿足條件:
H(x0,0)=0,H(x,1)=F(x)
(1)
即當(dāng)t=0時(shí),H(x0,0)=0的解x0已知;當(dāng)t=1時(shí),H(x,1)=F(x)=0的解x*即為方程的解。滿足上述條件常用的同倫為:
H(x,t)=F(x)+(t-1)F(x0)
(2)
延拓法迭代求解公式為:
其中,k=1,2,3,…,N-1。
牛頓法迭代求解公式為:
xk+1=xk-F′(xk)-1F(xk)
(4)
其中,k=N,N+1,N+2,…。
聯(lián)立式(3),(4)即為延拓牛頓法。其中,前面N步(式(3))主要是為求解x*的1個(gè)足夠好的初始近似值xN,然后再用牛頓法(式(4))即可求得x更精確的近似解。

取不同迭代初值時(shí)牛頓法和延拓牛頓法收斂性如表2所示。其中,在采用延拓牛頓法時(shí)N取30,表中延拓牛頓法的迭代次數(shù)與牛頓法的迭代次數(shù)相同。
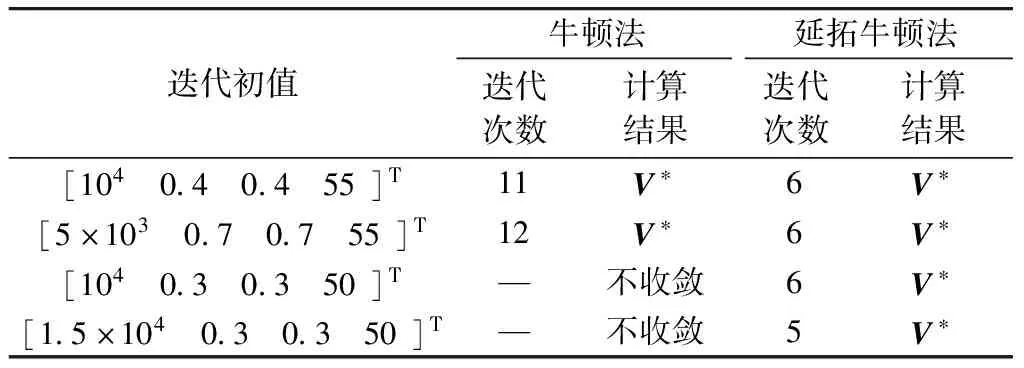
表2 迭代初值不同時(shí)牛頓法和延拓牛頓法的計(jì)算結(jié)果
從表2對單元Ⅰ型的算例研究可看出,采用牛頓法求解滑移索單元內(nèi)變量時(shí),存在一定的局部收斂性,算法不易收斂,而采用延拓牛頓法時(shí)具有較強(qiáng)的穩(wěn)定性和收斂性,且迭代初值選擇的范圍較大。單元 Ⅱ,Ⅲ型的收斂性研究結(jié)果與單元Ⅰ型的收斂情況一致,在此不再贅述。
3 索結(jié)構(gòu)分析方法
基于滑移索單元,可構(gòu)建含滑動(dòng)節(jié)點(diǎn)索結(jié)構(gòu)體系精確模擬分析方法,其求解過程和步驟如下。



5)重復(fù)步驟4),直至誤差‖ΔPn‖≤ε和‖Δun‖≤ε,其中ε為小數(shù),則求解收斂,即可得到整體結(jié)構(gòu)受力狀態(tài)。
6)求解過程中,若整體結(jié)構(gòu)中存在梁、桿和殼等其他單元,其計(jì)算原理可參見相關(guān)文獻(xiàn),在此不再贅述。
上述方法建立的索結(jié)構(gòu)分析程序在求解時(shí)需給出索原長,但在實(shí)際工程施工和設(shè)計(jì)中往往只給出預(yù)應(yīng)力狀態(tài)下索在控制點(diǎn)的張力或垂度限值,而索原長未知。因此,在對索結(jié)構(gòu)進(jìn)行分析時(shí)需首先假定索原長,然后以指定點(diǎn)的張力和垂度為目標(biāo)變量進(jìn)行迭代求解。
4 工程算例分析
采用上述方法編制了可精確模擬含滑動(dòng)節(jié)點(diǎn)索結(jié)構(gòu)體系分析的有限元程序,用于實(shí)際工程中該類結(jié)構(gòu)設(shè)計(jì)和施工過程分析。
1)索道受力狀態(tài)分析 取圖6所示滑動(dòng)索道體系,其中索兩端點(diǎn)A,D固定,2個(gè)滑輪中心點(diǎn)B,C固定,索在滑輪上可滑移。索截面面積A=2.0×10-4m2,彈性模量E=1.9×1011N/m2,索重w=50N/m;滑輪重G=0,半徑r=0.3m,摩擦效率e=1.0。E點(diǎn)作用1個(gè)豎向荷載P,分為P=0,P=5kN 2種情況進(jìn)行討論。將整個(gè)結(jié)構(gòu)劃分為2個(gè)索輪單元Ⅰ型進(jìn)行求解,分析中首先給定索結(jié)構(gòu)初始狀態(tài),即首先給出E點(diǎn)初始坐標(biāo)及索原長。
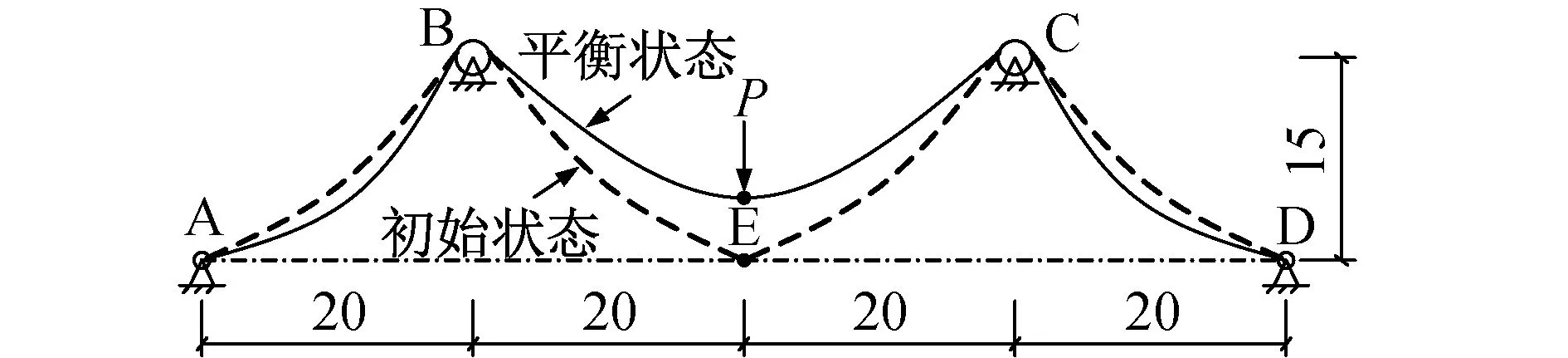
圖6 滑動(dòng)索道體系(單位:m)
分3種工況進(jìn)行求解:①索原長為100m時(shí)結(jié)構(gòu)的平衡狀態(tài);②索在A點(diǎn)張力為800N(P=0)和5kN(P=5kN)時(shí)索原長;③索跨中節(jié)點(diǎn)E垂度為10m(P=0)和13m(P=5kN)時(shí)索原長。各種工況下的求解結(jié)果如表3,4所示。在此設(shè)P為索道上跑車自重,則在給定索總原長的基礎(chǔ)上改變其作用點(diǎn)E的位置,即可模擬固結(jié)式跑車在索道上的行走。對于輪式跑車,可在跑車作用處設(shè)置1個(gè)滑移索單元,跑車自重作用在滑輪上,同時(shí)增加1道牽引索,一端與跑車的滑輪中心相連,另一端連在牽引裝置上,拉動(dòng)牽引索改變跑車滑輪在索道上的位置,即可模擬跑車在索道上的行走。
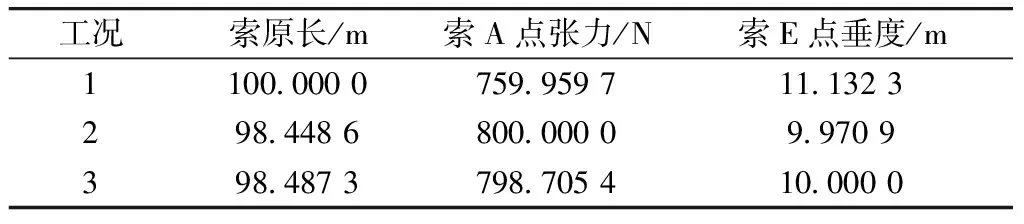
表3 3種工況下的求解結(jié)果(P=0)
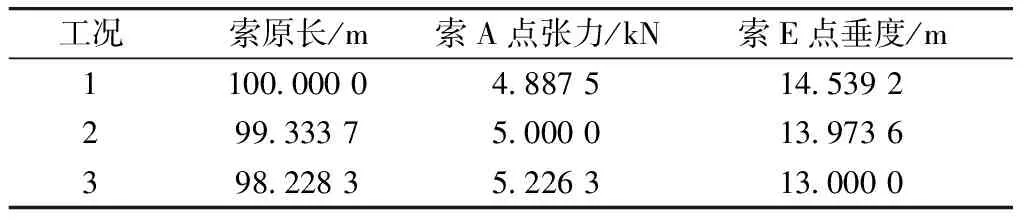
表4 3種工況下的求解結(jié)果(P=5kN)
2)懸索橋主纜受力狀態(tài)分析 取圖7所示懸索橋主纜進(jìn)行分析,其中,纜索截面面積A=0.3m2,彈性模量E=1.9×1011N/m2,索重w=50kN/m;B,C處鞍座重G=0,半徑r=0.5m,假設(shè)纜索與鞍座之間可產(chǎn)生相互滑移,摩擦效率e=1.0。取橋塔剛度足夠大,不考慮加勁梁作用。分析中首先給定纜索初始狀態(tài),即首先給出E點(diǎn)初始坐標(biāo)及纜索原長。分3種工況進(jìn)行求解:①纜索原長為1 500m 時(shí)結(jié)構(gòu)平衡狀態(tài);②纜索在A點(diǎn)張力為4.5×104kN時(shí)索原長;③纜索跨中節(jié)點(diǎn)E垂度為80m時(shí)索原長。求解結(jié)果如表5所示。分析中若將主纜根據(jù)設(shè)計(jì)分成若干索段,按施工方案依次安裝吊索及加勁梁,即可模擬懸索橋在施工過程中的受力狀態(tài)。

圖7 懸索橋主纜(單位:m)
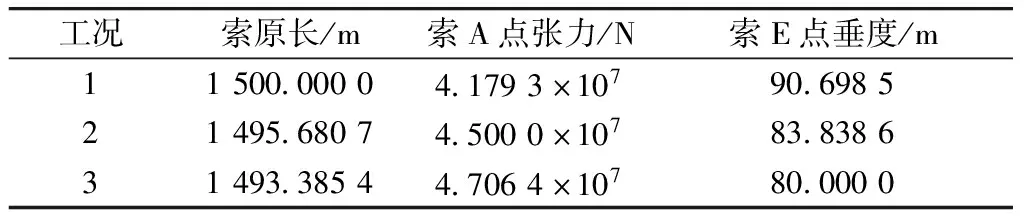
表5 3種工況下的求解結(jié)果
3)大跨度懸挑索-滑輪結(jié)構(gòu)受力狀態(tài)分析 取圖8所示索-滑輪體系進(jìn)行分析,其中索截面面積Ac=2.0×10-4m2,彈性模量Ec=1.9×1011N/m2,索重w=50N/m;滑輪半徑r=0.3m,摩擦效率e=1.0。橫梁截面面積A=1.466×10-2m2,慣性矩I=1.059 3×10-3m4,彈性模量E=2.06×1011N/m2。荷載P=10kN,不考慮橫梁自重。分2種工況進(jìn)行求解:①索原長為65m時(shí)結(jié)構(gòu)平衡狀態(tài);②索在B點(diǎn)張力為18kN時(shí)索原長。2種工況下索和橫梁受力狀態(tài)如表6,7所示。
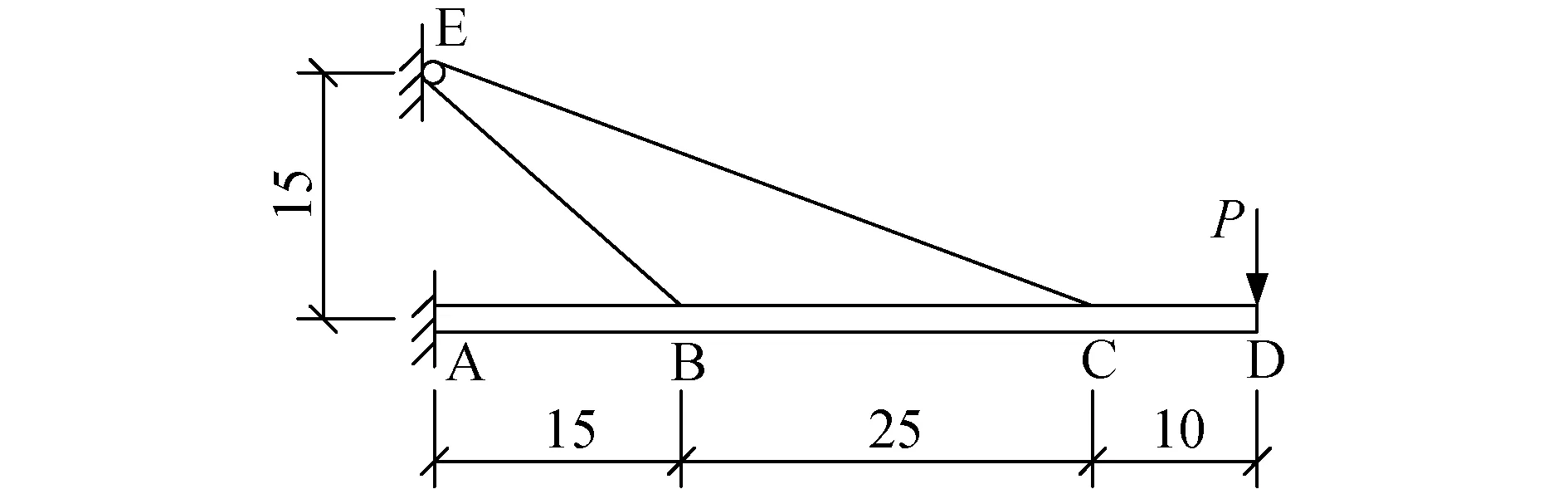
圖8 大跨度懸挑索-滑輪結(jié)構(gòu)體系(單位:m)

表6 2種工況下索受力狀態(tài)
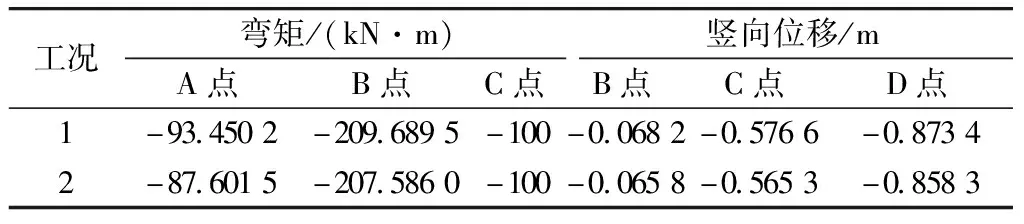
表7 2種工況下橫梁受力狀態(tài)
5 結(jié)語
1)對可精確模擬索結(jié)構(gòu)中滑動(dòng)節(jié)點(diǎn)受力特性的滑移索單元進(jìn)行探討,研究表明這3類單元也具有通用性。
2)構(gòu)建了滑移索單元內(nèi)變量求解的延拓牛頓法,能有效提高單元求解的收斂性,并且迭代初值選擇范圍更大。
3)構(gòu)建含滑動(dòng)節(jié)點(diǎn)索結(jié)構(gòu)體系求解的迭代分析法,編制相應(yīng)的有限元程序,算例分析表明,分析方法和分析程序正確,可用于實(shí)際工程的設(shè)計(jì)和施工分析。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學(xué)生數(shù)理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
