基于蒙特卡洛方法的可靠性靈敏度分析★
2022-01-25 04:38:40劉曉靜
機(jī)械管理開發(fā) 2021年11期
關(guān)鍵詞:功能
劉曉靜
(山西工程職業(yè)學(xué)院,山西 太原 030009)
引言
可靠性靈敏度分析方法是基于可靠性計(jì)算方法之上的分析方法,是可靠性分析方法的遞進(jìn)。早在1985年HaftkaRT,GurdalZ[1]就對(duì)結(jié)構(gòu)系統(tǒng)的敏感度設(shè)計(jì)進(jìn)行了研究。張義民[2]等提出了單自由度非線性隨機(jī)參數(shù)振動(dòng)系統(tǒng)的可靠性靈敏度分析,討論了隨機(jī)參數(shù)服從正態(tài)分布的機(jī)械結(jié)構(gòu)的可靠性靈敏度設(shè)計(jì)。
建立剛性四桿機(jī)構(gòu)輸出角的模型,采用蒙特卡洛方法對(duì)輸出角的可靠性靈敏度進(jìn)行研究,為后續(xù)有效提高運(yùn)動(dòng)機(jī)構(gòu)的可靠性和穩(wěn)健性打好基礎(chǔ)。
1 Monte Carlo可靠性靈敏度
結(jié)構(gòu)在規(guī)定時(shí)間和規(guī)定條件下完成規(guī)定功能的能力,稱為可靠性[3]。在規(guī)定時(shí)間和規(guī)定條件下完成預(yù)定功能的概率為可靠度。可靠性對(duì)于基本隨機(jī)參數(shù)的偏導(dǎo)數(shù)為可靠性靈敏度。
靈敏度為失效概率pf對(duì)基本變量xi的分布參數(shù)(i=1,2,…,n;k=1,2,…,m),其中mi為第i個(gè)變量xi分布參數(shù)總數(shù)的偏導(dǎo)數(shù),將失效概率的積分對(duì)分布參數(shù)求導(dǎo)數(shù),則得到可靠性靈敏度如下[4]:

Monte Carlo[5]模擬過程中,采用樣本均值代替總體均值,數(shù)學(xué)期望可以用樣本函數(shù)的均值來估計(jì):
失效概率對(duì)于參數(shù)的無量綱靈敏度系數(shù)表達(dá)式如下:

服從正態(tài)分布的變量的失效概率對(duì)于均值和標(biāo)準(zhǔn)差的無量綱靈敏度系數(shù)[6]如下:
式中,uji為第j個(gè)樣本xj=(xj1,xj2,…,xjn)T的第i個(gè)分量對(duì)應(yīng)的標(biāo)準(zhǔn)正態(tài)變量,即。
系統(tǒng)不能完成規(guī)定功能的概率表示為失效概率pf。系統(tǒng)的可靠度pr與失效概率滿足以下關(guān)系式:

系統(tǒng)可靠性分析的主要問題就是處理系統(tǒng)的隨機(jī)問題來確定系統(tǒng)的失效概率。
如果連續(xù)隨機(jī)變量Z的概率密度函數(shù)為fZ(z),則由失效概率的意義可知:
如果用fX(x)=fX(x1,x2,…,xn)表示基本隨機(jī)變量X=(X1,X2,…,Xn)T的聯(lián)合概率密度函數(shù),用FX(x)=FX(x1,x2,…,xn)表示聯(lián)合累積分布函數(shù),那么系統(tǒng)的失效概率可表示為:
若各基本隨機(jī)變量Xi之間相互獨(dú)立,且Xi的概率密度函數(shù)為fX(ix)i,則失效概率為:

可靠指標(biāo)是可靠性指標(biāo)的簡稱[5]。由于基本隨機(jī)變量的不確定性,其聯(lián)合概率密度函數(shù)的獲取比價(jià)困難,聯(lián)合概率密度函數(shù)的計(jì)算也非常困難,因此在工程上一般不使用式(11)來計(jì)算失效概率。根據(jù)可靠性指標(biāo)與失效概率的對(duì)應(yīng)關(guān)系,通過計(jì)算可靠性指標(biāo)來確定系統(tǒng)的可靠性。
假設(shè)功能函數(shù)Z~N(μZ,σZ),則功能函數(shù)的概率密度函數(shù)為:

通過變換,Y=(Z-μZ)/σZ,可以將功能函數(shù)轉(zhuǎn)換成標(biāo)準(zhǔn)正態(tài)分布Y~N(0,1),那么其概率密度函數(shù)和累積分布函數(shù)為:
將式(6)代入式(4),并注意到式(7)和式(8),則失效概率[6]為:
可靠性指標(biāo)、失效概率和可靠概率就可以分別表示為:
上述對(duì)可靠指標(biāo)的計(jì)算是建立在功能函數(shù)服從正態(tài)分布的條件下。當(dāng)pf≥0.001(或β≤3.090 2)時(shí),失效概率的計(jì)算結(jié)果能夠滿足工程上所要求的精度,因此可以不考慮基本變量的分布類型而簡化計(jì)算過程;當(dāng)失效概率或可靠指標(biāo)不滿足以上關(guān)系時(shí),必須考慮功能函數(shù)的概率分布形式。
Monte Carlo法計(jì)算求解齒輪接觸疲勞可靠度的大致過程如下為:由基本隨機(jī)參數(shù)的聯(lián)合概率密度函數(shù)fX(X)模擬產(chǎn)生N組隨機(jī)樣本xj(j=1,2,…,N),把樣本數(shù)據(jù)值代入齒輪接觸疲勞的極限狀態(tài)方程里,然后統(tǒng)計(jì)落入可靠域的樣本點(diǎn)數(shù),即齒輪傳動(dòng)齒面接觸應(yīng)力小于齒面許用接觸應(yīng)力Nr,用頻率Nr/N近似代替可靠度PR,則
2 算例
圖1為四桿

圖1 四桿機(jī)構(gòu)角度示意圖
機(jī)構(gòu)的角度示意圖,主動(dòng)桿件轉(zhuǎn)速為300 r/min,L1,L2,L3,L4已知,具體值及分布類型見下表1。
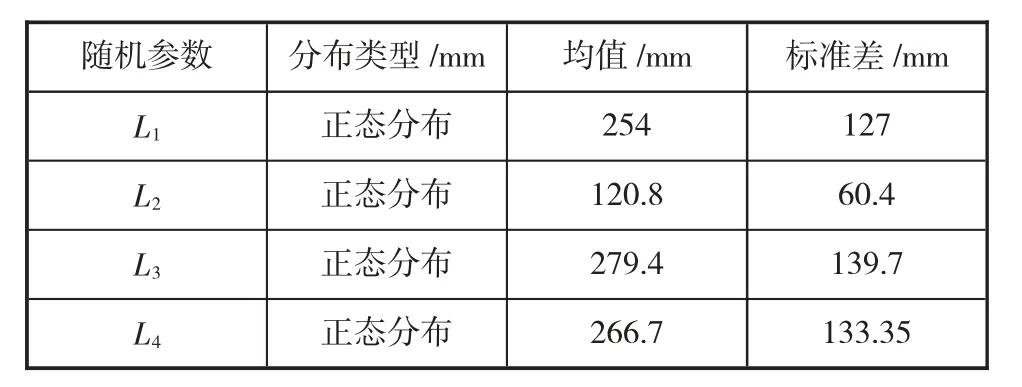
表1 彈性四桿機(jī)構(gòu)的參數(shù)
下頁圖2為基于蒙特卡洛方法對(duì)四桿機(jī)構(gòu)輸出角可靠性分析流程圖。
根據(jù)表1機(jī)構(gòu)變量參數(shù)表對(duì)參數(shù)抽取106個(gè)樣本點(diǎn),計(jì)算剛性機(jī)構(gòu)輸出角并進(jìn)行可靠性及靈敏度分析,根據(jù)式(5)和式(6)對(duì)輸出角的失效概率關(guān)于各參數(shù)求均值與標(biāo)準(zhǔn)差靈敏度進(jìn)行求解。
從下頁圖3、圖4中可以看出,對(duì)于輸出角的失效概率對(duì)于桿件L3的敏感度程度相對(duì)大。可以看出各參數(shù)的均值靈敏度有正值有負(fù)值,說明不同參數(shù)的均值對(duì)于輸出角的失效概率影響有正有負(fù)。L3均值靈敏度均為正值,說明L3的均值對(duì)于失效概率的影響是積極的。而對(duì)于各參數(shù)的標(biāo)準(zhǔn)差靈敏度則基本為負(fù)值,各參數(shù)標(biāo)準(zhǔn)差對(duì)于失效概率的靈敏度影響是消極的,且L3的標(biāo)準(zhǔn)差對(duì)靈敏度消極影響較其他參數(shù)更大。
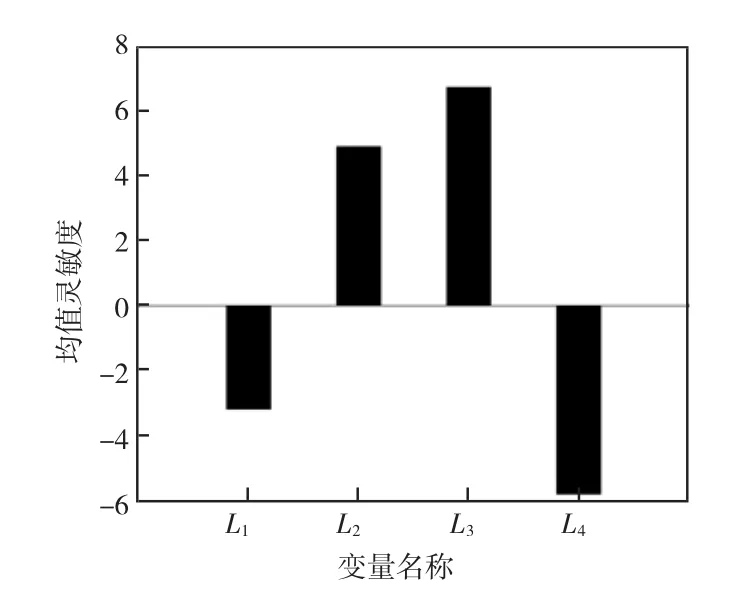
圖3 均值靈敏度直方圖

圖4 標(biāo)準(zhǔn)差靈敏度直方圖
3 結(jié)語
各參數(shù)均值中對(duì)輸出角的影響最大的為L3,并且是積極影響;各參數(shù)的標(biāo)準(zhǔn)差對(duì)輸出角的影響最大的也為L3,并且是消極影響。
由此通過計(jì)算可以得到彈性四桿機(jī)構(gòu)中任意一點(diǎn)處,隨著主動(dòng)桿件轉(zhuǎn)動(dòng),各參數(shù)對(duì)于輸出角可靠性影響,為后續(xù)有效地提高運(yùn)動(dòng)機(jī)構(gòu)的可靠性和穩(wěn)健性打好基礎(chǔ)。
猜你喜歡
鐘表(2023年5期)2023-10-27 04:20:44
中華詩詞(2022年6期)2022-12-31 06:41:24
當(dāng)代陜西(2021年21期)2022-01-19 02:00:26
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2020年1期)2020-02-20 13:23:44
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年11期)2019-01-14 03:07:20
中國科技論壇(2017年7期)2017-07-25 08:49:53
制造技術(shù)與機(jī)床(2017年3期)2017-06-23 08:11:33
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學(xué)報(bào)(2016年1期)2017-01-20 08:21:20
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年22期)2014-03-01 04:32:55
