自動駕駛汽車的遠程電源控制系統設計
2022-01-25 10:43:35冷旭寧朱作鑫黃祖朋
時代汽車 2022年1期
關鍵詞:控制
冷旭寧 朱作鑫 黃祖朋
摘 要:自動駕駛是汽車行業未來的發展趨勢,而對車輛進行遠程啟動則是實現自動駕駛的關鍵。為此,本文設計了一種基于用戶APP、云平臺、車載終端和PEPS控制器等對車輛進行遠程電源控制的解決方案,有效地解決了L4及以上自動駕駛車輛遠程召喚等場景中的電源控制的問題。
關鍵詞:自動駕駛 遠程啟動 電源 控制
Abstract:Autonomous driving is the development trend of the automobile industry in the future, and remote starting of the vehicle is the key to realize autonomous driving. Therefore, this paper designs a solution for remote power control of vehicles based on user APP, cloud platform, on-board terminal and PEPS controller, which effectively solves the problem of power control in scenarios such as remote call of L4 or above autonomous driving vehicles.
Key words:automatic driving, remote start, power, control
1 引言
近年來,隨著計算機技術、控制技術和通信技術的不斷發展,自動駕駛汽車成為了熱門方向[1-3]。在SAE自動駕駛車輛分級中,L4及以上等級的自動駕駛車輛將不再依賴于駕駛員的操作,汽車用戶只需要采用遠程的方式即可對車輛進行控制。遠程啟動是自動駕駛的一個非常重要的環節,在自動泊車和遠程召車場景中尤其重要,因為如果車輛無法啟動,后續就無法提供任的何服務。為此,本文提出了一種基于用戶APP、云平臺、車載終端和PEPS(Passive Entry Passive Start,無鑰匙進入及啟動)控制器等對車輛進行遠程電源控制的方案,期待能夠解決了自動駕駛車輛遠程召喚等場景中的電源控制的問題。
2 整體架構
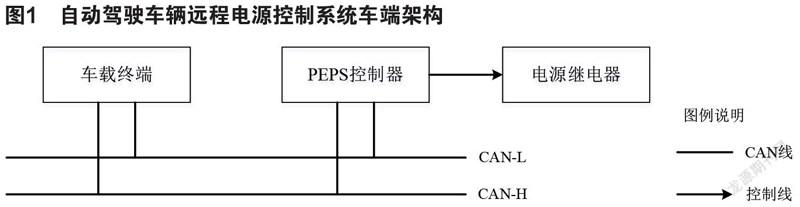
本文設計的遠程電源控制系統主要包含2部分:遠程傳輸系統部分和車載系統部分。其中,遠程傳輸系統包含用戶APP和云平臺,車載系統則包含車輛上用于接收遠程指令的車載終端和響應遠程指令的PEPS控制器以及控制電源的繼電器(圖1)。
遠程電源控制系統中,每個模塊各司其職,又密不可分,其功能職責劃分如下:
(1)用戶APP:APP是接收用戶操作指令的重要媒介。以停車場的自主泊車和遠程召車為例,APP上包含了用戶當前想要下發給車輛的指令(如泊車和召車)及用戶想要車輛到達的目的地,車輛或者車端系統會根據收到的指令進行操作。總而言之,車端系統是執行用戶指令部分,但是最初始的指令是由用戶發出,而用戶APP則是整個自動駕駛系統接收用戶指令的輸入端。(2)云平臺:云平臺主要用于接收、存儲和傳遞APP發來的指令,并根據車輛上傳的數據做相應的邏輯。用戶在APP上的操作指令通過無線網絡傳輸到平臺,平臺接收到指令后存儲在內存中,并根據車輛上傳的數據判斷車輛的狀態,如果狀態滿足則將用戶的指令傳遞到車端,且實時監控車輛的狀態,形成完整的服務閉環。(3)車載終端:車端系統的一部分,是車輛與外界的網絡接口。在本系統中車載終端主要用于接收云平臺的指令,并根據車輛的實際狀況將指令發送到車內CAN總線上。(4)PEPS控制器:PEPS控制器屬于車端系統的一部分,在本系統中主要用于控制車輛電源繼電器的通斷,同時,PEPS控制器還兼具身份校驗的功能。(5)電源開關繼電器:電源開關繼電器也車端系統的一部分,是電源控制的執行器,主要接受PEPS控制器的電壓信號控制整車電源的通斷。
3 總體設計
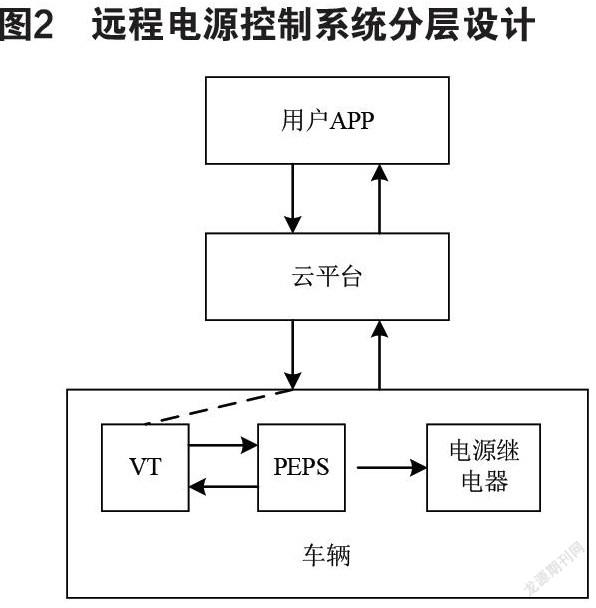
遠程電源控制系統是自動駕駛車輛的配套服務部分,目的是通過遠程指令將車輛啟動,因此系統采用的是用戶端-云端-車端的設計思路(圖2)。由于目前手機已經非常普遍,因此本文用戶端APP采用Android移動設備作為開發平臺;云平臺是用戶端與車端連接的媒介,將用戶的需求轉發至車端;車端則接收并執行指令[4,5],在本系統中主要包含VT(車載終端,Vehicle Terminal)、PEPS控制器和電源繼電器。VT接收云端的指令,是車端的網聯接口;PEPS是遠程電源控制系統的控制器,接收VT的指令后進行安全校驗及執行相應的指令;電源繼電器是本系統的執行器,接收PEPS的硬線信號,控制整車電源的通斷。
在指令下發的同時,系統建立了信息回傳機制,一次指令下發出去后需要知道執行的結果,即車端-云端-用戶端的反饋通路。PEPS將電源控制器的狀態通過CAN線傳輸給VT,通過VT的4G模塊將數據發送至云平臺,云平臺接收到指令后發送合適的提示語給用戶APP。
4 系統開發
本文以自主泊車和遠程召車兩個場景為例,研究遠程電源控制系統的具體實現過程。
4.1 用戶端的實現
用戶端包含2個指令:召車和泊車。指令從用戶端發出后,云端和車端根據各自當前的狀態進行操作。
4.2 云端的實現
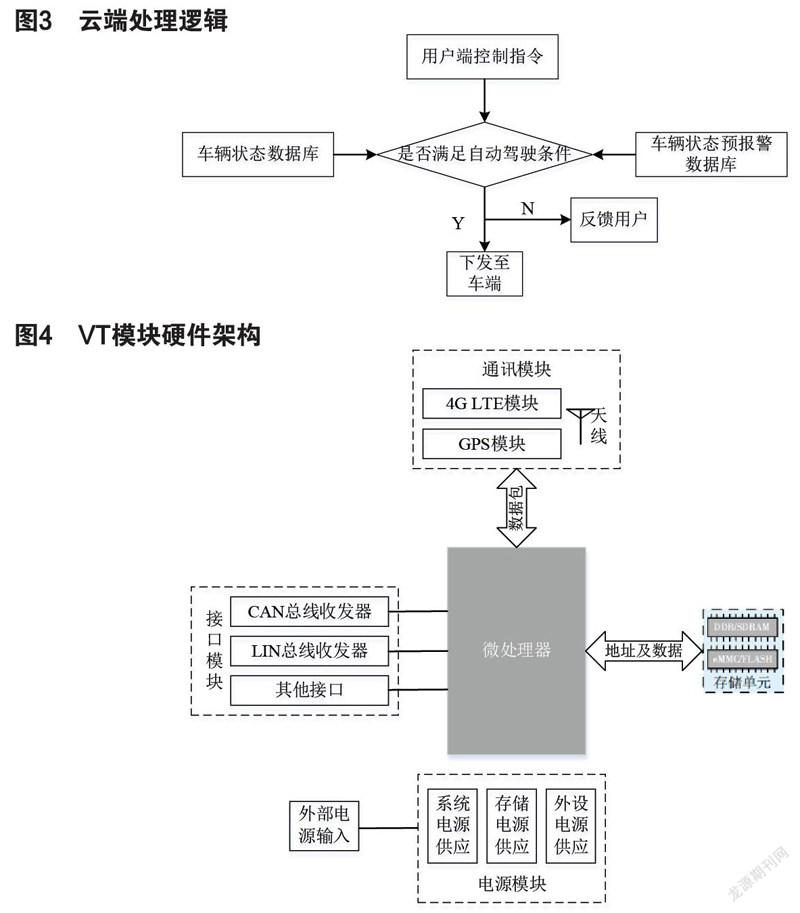
云端系統基于Ubuntu 16.04開發,負責車輛狀態的監控,在合適的時間下發指令和反饋用戶車端操作結果,運行邏輯見圖3所示。
4.3 車端的實現
車端包含VT、PEPS控制器和電源繼電器,其中VT和PEPS控制器之間通過高速CAN進行通訊,PEPS控制器與電源繼電器之間通過硬線連接。
VT的硬件架構見圖4,主要包含主控單元、電源模塊、4G通訊模塊、汽車接口模塊等。其中,主控單元是VT的核心,其將終端內不同的功能單元進行集成連接,協同各模塊合理、有序地工作;電源模塊是終端穩定工作的基礎,終端的外部電源輸入來自車內12 V 鉛酸蓄電池;VT的通信單元包含4G LTE通信和GPS通信,4G LTE通信模塊可以將采集到的電池信息定時上傳至后臺并接收后臺下發的信息,GPS 模塊用以對車輛進行定位和為用戶導航。汽車接口模塊主要包含CAN總線通訊模塊,可采集電池的工作狀態信息和工作環境信息等。
PEPS控制器的功能是對電源繼電器進行控制,其在接收到指令后根據車輛當前的狀態進行操作,如果滿足邏輯則執行操作,不滿足則將失敗狀態和失敗的原因反饋給VT。
電源繼電器是對電源進行操作的執行器,由于結果簡單,本文不做具體的展開。
5 結果與結論
通過本文設計的自動駕駛車輛遠程電源控制系統,可實現自動駕駛車輛在停車場景中的全功能覆蓋,可以將車輛從休眠狀態啟動車輛具備行駛的能力,也能將車輛從啟動狀態置為熄火狀態,并且在整個環節中考慮安全性,很好地滿足了自動駕駛車輛的需求。
參考文獻:
[1]徐祥運,趙燕楠.無人駕駛汽車技術的社會影響及其應對策略[J].學術交流,2021(03):134-148+192.
[2]陳君毅,李如冰,邢星宇,蒙昊藍,余卓平.自動駕駛車輛智能性評價研究綜述[J].同濟大學學報(自然科學版),2019,47(12):1785-1790+1824.
[3]唐立,卿三東,徐志剛,周厚慶.自動駕駛公眾接受度研究綜述[J].交通運輸工程學報,2020,20(02):131-146.
[4]馮樹民,黃秋菊,張宇,趙琥.駕駛人“感知-決策-操控”行為模型[J].交通運輸系統工程與信息,2021,21(01):41-47.
作者簡介
冷旭寧:(1987.11—),男,山東海陽人,博士研究生,中級工程師,山東黃海科技創新研究院新能源新材料專家。研究方向:新能源汽車動力電池及系統、鋰離子電池系統的設計開發及工藝集成。
通信作者:
朱作鑫:(1985.12—),男,山東日照人,博士研究生,高級工程師,山東黃海科技創新研究院新能源新材料專家。研究方向:新能源汽車動力系統、智能制造及人工智能等。
黃祖朋:(1989.06—),男,廣西桂林人,博士研究生,高級工程師,上汽通用五菱汽車股份有限公司新能源技術專家。研究方向:動力電池、儲能系統、高壓充配電系統、電動車換電設備、無線充電、線控底盤以及氫燃料電池汽車等。
猜你喜歡
現代經濟信息(2016年19期)2016-10-20 17:15:21
商業會計(2016年13期)2016-10-20 15:43:05
中國科技博覽(2016年19期)2016-10-19 13:43:31
中國科技博覽(2016年19期)2016-10-19 12:09:22
中國科技博覽(2016年18期)2016-10-19 08:58:33
中國科技博覽(2016年18期)2016-10-19 08:43:03
科技視界(2016年21期)2016-10-17 17:06:18
商(2016年27期)2016-10-17 05:41:05
科學與財富(2016年28期)2016-10-14 20:57:11
大眾理財顧問(2016年9期)2016-10-11 17:10:17