基于Logistic-Fisher的老齡陪伴機器人外觀形態評價方法
2022-01-27 02:45:40王秋惠張倩男
包裝工程 2022年2期
王秋惠,張倩男
基于Logistic-Fisher的老齡陪伴機器人外觀形態評價方法
王秋惠1,2,張倩男1
(1.天津工業大學 機械工程學院,天津 300387;2.天津工業大學經濟與管理學院,天津 300387)
提出一種基于眼動追蹤的老齡陪伴機器人的外觀形態評價方法。首先借助眼動實驗,獲得老年人觀看陪伴機器人時的眼動特征,提取眼動指標、心率指標與被試變量,利用SPSS23.0軟件平臺對變量信息進行描述統計和二元Logistic回歸分析;其次根據老年人的生理和心理的特殊性將老齡陪伴機器人的外觀形態評價定義為二分類問題,以影響顯著性最強的幾個因子作為判別因子建立Fisher判別函數模型,并進行實驗驗證。性別、年齡、文化程度、心率指標均對陪伴機器人外觀關注度無顯著影響;總注視時間對其產生顯著負向影響,平均注視時間、注視次數產生顯著正向影響,判別模型預測樣本與實際樣本相比準確度為91.0%。Logistic-Fisher方法準確度較高,為構建老齡陪伴機器人的外觀形態設計評價體系提供了一種可行的技術途徑。
老齡陪伴機器人;外觀評價;眼動跟蹤;二元Logistic回歸;Fisher判別模型
在中國老齡化的背景下,全社會養老負擔日益加重[1],老年人作為特殊群體,受到了社會的廣泛關注。由于子女經常不在身邊,以及照顧老年的勞動力相對短缺,老齡服務問題已成為我國迫切需要研究解決的重大課題之一,而智慧養老則成為解決這一問題的有效途徑。養老智慧平臺系統、智能家居、養老機器人等智慧產品的開發,能夠滿足多樣化需求,為老年人提供方便、高效、高質量的生活[2]。因此,通過智能機器人代替人來從事老年照顧服務有著廣闊的市場前景[3]。老齡陪伴機器人作為智能機器人的一種,能夠給予老年人陪伴及日常照顧,并作為商品出現在消費市場中。為了能夠從眾多競爭品中迅速吸引消費者注意力,產品外觀形態則成為了能夠激發用戶產生期望及使用意向的重要指標[4]。因此,外觀造型是主要決定因素。陪伴機器人能否被老年人接受且喜愛很大程度上取決于其造型設計能否符合消費者的需求。有學者對老齡機器人的外觀形態問題進行了研究,其中楊悅[5]等結合質量功能展開(QFD)方法和粗糙層次分析(RAHP)方法將餐館服務機器人的用戶需求轉化為可用的設計參數;朱彥[6]用感性工學結合層次分析法對家庭服務機器人形態的感性認知進行系統量化分析,提出新的家庭服務機器人的外形設計;YA-HUEI W[7]等通過焦點小組的方法探索老年人對機器人外貌的感知;DEUTSCH I[8]等通過對老年人深度訪談探索其關于機器人外形的態度和關注度,王秋惠[9-10]等在康復機器人界面設計、老齡服務機器人界面等領域進行了深入研究。
盡管上述學者從不同層面提出了老齡服務機器人的外觀造型設計方法,但是這些方法仍存在以下不足:(1)雖然產品造型可以通過意象詞匯來進行定量化,但它是用戶基于平時的認知對產品進行的一種模糊性描述,這種主觀性的評價因具有個體差異,并不能很好地描述產品外觀形態的好壞;(2)老年人認知弱化,審美比較直截了當,更注重陪伴機器人外觀形態的直觀感受,判定偏向于兩極化,即好看與不好看,目前并沒有很多文獻針對老年人簡單的造型喜好判斷做相關研究。
針對上述問題,本文提出一種基于眼動追蹤的老齡陪伴機器人外觀形態評價方法,建立以眼動與心率為主的代表性指標體系。運用二元Logistic回歸對其進行定量化處理,確定外觀形態因素對機器人設計偏好影響的權重,得到與老年人關注度顯著性最強的指標因子。在老年人認知審美方面,將老齡陪伴機器人外觀形態評價定義為二分類問題,建立判別函數,以及客觀性標準,為日后老齡陪伴機器人的外觀設計提供技術支持及理論實踐依據。
1 理論與算法
1.1 二元Logistic回歸分析
本文使用二元Logistic回歸模型將影響老年人對陪伴機器人關注度的指標因子進行定量分析,它是一種對二分類因變量進行回歸分析時經常采用的非線性分類統計方法[11-12],劉榮輝[13]等學者建立Logistic回歸模型以改進反映家庭成員關系的邊權模型,姜廣輝[14]等使用Logistic回歸模型對北京山區農村居民點變化的內部及外部驅動力進行深入分析。其中“二元”指因變量為二分類變量,在本實驗中為“關注度高”和“關注度低”,Logistic指對目標概率進行Logit變換[15]。設為二分類因變量,取值“1”代表關注度高,“0”代表關注度低,自變量(i)為各指標因子值。記關注度高的條件概率為,對進行Logit變換,公式如下:
(1)
則Logistic線性回歸模型如下:
(2)
式(2)中:0為截距,1,…,β為回歸系數,即代表的是各指標因子的相對貢獻率。如果系數為正,則對應因子和老年人關注度呈正相關;反之,系數為負,則因子和老年人關注度呈負相關。各指標因子對關注度結果影響越顯著,表明其在老年人對陪伴機器人外觀偏好的影響程度越大。
1.2 Fisher判別
Fisher判別分析借助投影的方式對樣本進行降維,把多維數據點投影在一條直線上,見圖1。這樣可以最大限度地縮小同類樣本的距離,同時擴大不同類樣本間的距離,使得兩類樣品的差異得以顯著區分,尤其適用于二分類判別分析,且最優方向的投影線,需要通過樣本訓練得到[16]。清華大學的盧兆麟等提取熱點圖顏色特征和灰度直方特征,將其作為判別因子建立Fisher判別函數模型,提出新的汽車造型評價方法。李長興[17]等為有效對煤與瓦斯突出進行預測,建立了Fisher逐步判別分析模型。
令={1,2,…,x}為屬性集,在維向量中描述為=((1),(2),…,(x)),屬性的范圍被稱為特征空間[18]。對原始數據統一處理,得出維空間下的樣本均值向量,將其變換到1維空間后的均值向量為M:
(3)
圖1 Fisher判別法基本原理
Fig.1 Basic principle of Fisher discriminant
式(3)中,n為樣本個數,樣本組內離散度為,計算如下:
(4)
Fisher判別的準則函數如下:
(5)
公式(5)得出的即為Fisher判別函數的線性判別式,也是最佳解向量。
1.3 基于Logistic-Fisher的老齡陪伴機器人外觀形態評價方法
建立Logistic-Fisher判別模型的主要步驟如下。
1)挑選實驗樣本,做眼動實驗。
2)提取眼動與心率數據并建立眼動數據與心率指標體系。
3)對指標因子進行二元Logistic回歸模型構建。
4)得出對關注度結果影響最顯著的指標因子。
5)將得出的指標因子作為判別因子建立Fisher判別模型,經過樣本訓練,得到最后的Logistic-Fisher判別模型。
基于Logistic-Fisher的老齡陪伴機器人外觀形態評價方法流程見圖2。
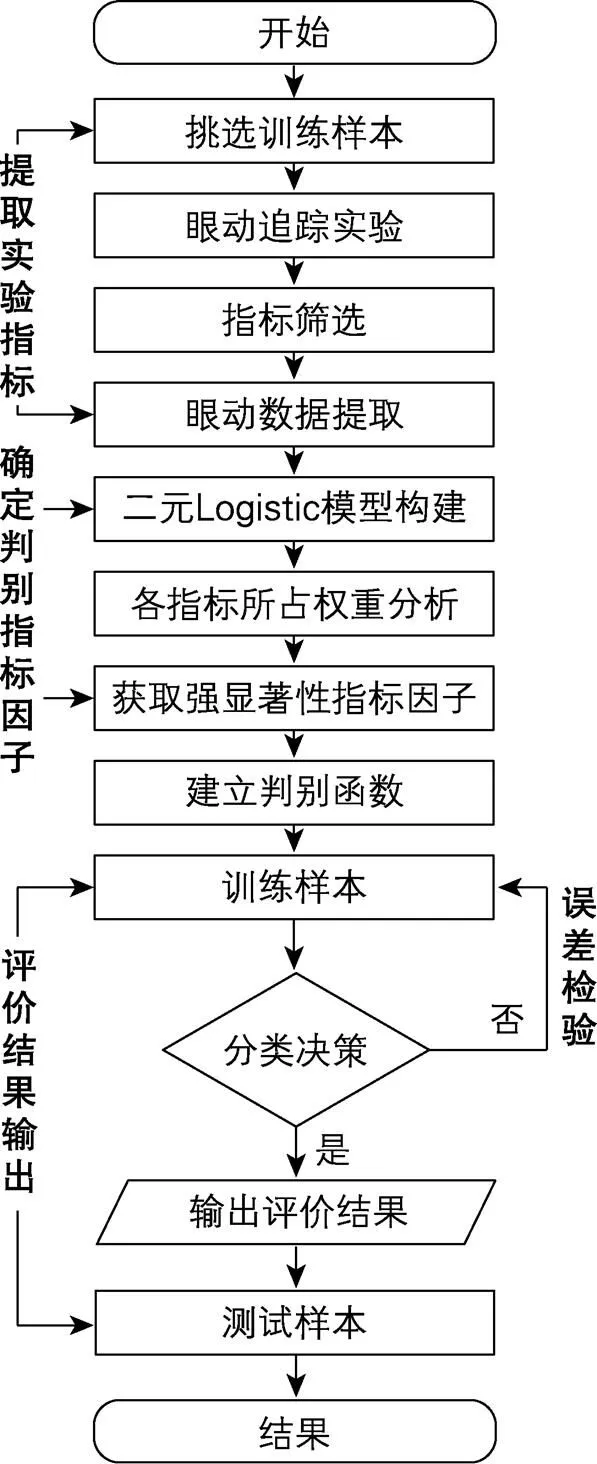
圖2 基于Logistic-Fisher的老齡陪伴機器人外觀形態評價方法流程
2 老齡陪伴機器人外觀形態評價的Logistic-Fisher判別模型
2.1 確定評價指標
2.1.1 指標因子分析與提取
1)眼動指標。眼動指標主要分為圖畫知覺指標(直觀性指標)與統計分析指標(基本指標與合成指標),圖畫知覺指標主要包括熱點圖、軌跡圖、峰值圖、視頻回放;統計分析指標主要包括注視類、眼跳類、凝視時間、掃描路徑等,見圖3。本文采用第一次注視時間、首次注視時長、總注視時間、平均注視時間、注視次數、第二注視時間作為眼動數據指標。其中,平均注視時間越長,表明產品越能引起注意或信息越不易被解讀;總注視時間越長,表明目標產品需要更多信息來進行解讀或更吸引人,即產品對于老年人的吸引度越高。
2)心率指標。心率變異性(HRV)可以反映連續R-R間隔之間的細微變化。目前,HRV被認為是反映自主神經對心律調控的一種簡單且無創的有效指標[19]。常用心率指標一般分為時域分析法指標和頻域分析法指標,時域分析法指標主要包括24 h正常竇性RR間期總體標準差(SDNN)、正常相鄰竇性RR間期差值均方根(rMSSD)、RR間期平均值標準差(SDANN)、正常RR間期的標準差(SDNNI)、相差>50 ms相鄰RR間期的總數(NN50)[20-21]等;頻域分析法指標主要包括超低頻(ULF)、極低頻(VLF)、低頻(LF)和高頻(HF)[22-23]。本文采用24 h正常竇性RR間期總體標準差(SDNN)作為心率數據指標,可以看出老年人對于感興趣和不感興趣的圖片的即時反映。
3)被測試者變量指標。為探究老年被測試者的不同程度的持續性特征差異對于老年陪伴機器人的外觀喜愛程度是否有影響,本文將性別、年齡、文化程度列入指標因子群當中,因所有被測試者均在家中居住,故居住情況不被列入本次指標群中。
2.1.2 面向老年群體陪伴機器人外觀的樣本分類
老齡陪伴機器人外觀評價本質上是樣本分類問題,即通過實驗或日常審美認知,將陪伴機器人外觀形態分為類似“好”“一般”“差”的評級。由于老齡產品的“老齡”功能被過度標榜,所以使老年人的外形需求等逐漸被忽視[24]。在實際生活中,老齡群體的視覺、記憶、推理等能力都會隨年齡增加而下降[25],審美評價單一直觀,因此可將研究對象分為兩類,即二分類問題[26]。例如,將陪伴機器人外觀形態分為兩類,“好看”的為一類(1),“不好看”的為另一類(2);其次可對兩類外觀形態進行比較,歸納出適合老年人群體認知審美的設計方法,有助于后續老齡陪伴機器人外觀形態評價進行預測分析。建立面向老年群體陪伴機器人的外觀形態線性判別函數,計算如下:
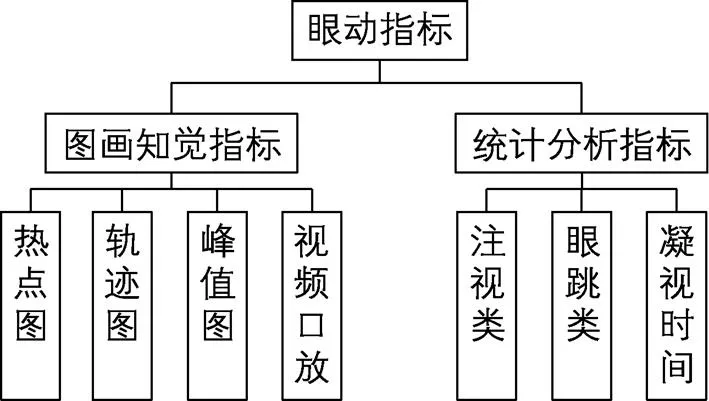
圖3 眼動指標分類
(6)
公式(6)中,()為判別值;1,…,X為基于眼動追蹤與心率測試的老齡陪伴機器人外觀形態的幾項評價指標,即為本方法中前期二元Logistic回歸得出的強顯著性指標因子;1,…,ω為判別系數,即各指標相應權重;0為常量。對于陪伴機器人二分類問題判別,采取以下決策規則:
(7)
2.1.3 進行眼動追蹤實驗
本文將老齡陪伴機器人分為“好看(1)”和“不好看(2)”兩類。從企業官網、相關產品圖冊等途徑搜集到68個樣本,通過多元尺度和聚類分析,并根據專家組的意見來對其進行提煉,主要劃分為4類代表性陪伴機器人,如果劃分類別單一,則不能完全表述老年人對陪伴機器人外觀形態的評價結果,見圖4。具體分為真人型、寵物型、擬人型、擬物型。并通過不同排版處理來產生32張刺激樣本圖片。被測試者共18名,其中男性7人,女性11人,平均年齡70歲,居住環境皆在家中,文化水平為小學畢業及以下6人,初中畢業5人,高中畢業2人,中專畢業4人,大學畢業1人。
本實驗使用中國津發科技公司生產的Tobii Pro X3-120眼動追蹤儀進行實驗,其采樣率120 Hz,該眼動儀通過雙眼采集,以及明瞳和暗瞳結合的方式來進行追蹤。將眼動儀安裝在14英寸DELL筆記本電腦顯示器下方,實驗開始前,每位被測試者都閱讀了知情同意書并簽字,測試前對每位被測試者分別進行調校。為老年人穿戴眼動傳感器及脈搏傳感器,采用正確坐姿并與顯示器保持平視,視距為60 cm,分別讓其觀察32張圖片,每張圖片刺激時長為10 s,每位老人完成全部測試任務預計時間為10 min。眼動及心率數據由ErgoLAB V3.0軟件進行統計處理。
眼動實驗測試后,對每位老年人進行問卷調查,問題為“您是否喜歡這款機器人的外觀形態”,答案為“喜歡”與“不喜歡”兩項選擇,同時也是“關注度高”與“關注度低”的直接反映。
2.2 二元Logistic回歸分析
提取上述實驗中8款老齡陪伴機器人外觀形態指標數據,共18位老年人,144組數據,分析各指標因子對老年人關注度高低的影響情況,將老年人關注度高取值為“1”,老年人關注度低取值為“0”。首先對模型整體有效性進行分析,見表1。表中模型檢驗的原定假設為:放入自變量兩種情況的模型質量是否均一致;因<0.05,說明拒絕原定假設,即說明本次構建模型時,放入的自變量具有有效性,因而模型構建有意義。

圖4 選取訓練樣本

表1 二元Logistic回歸模型似然比檢驗結果
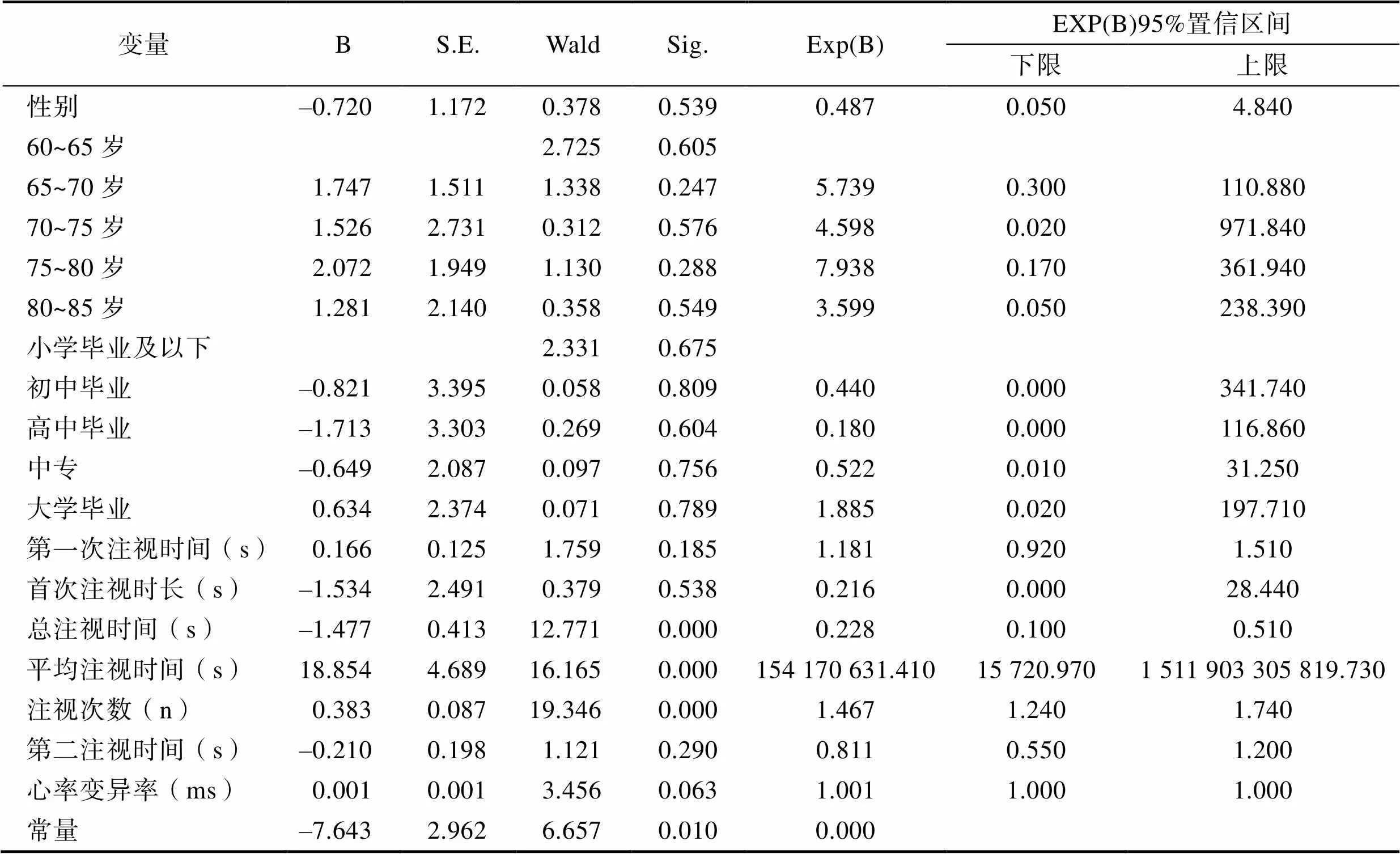
表2 二元Logistic回歸模型變量參數
注:B為回歸系數;S.E為標準差;Wald為Wald卡方值;Sig.為顯著性;EXP(B)為置信區間
為了得出顯著性最強的幾項指標因子,本文利用二元Logistic回歸分析,回歸結果,見表2。可見,性別(=0.539>0.05),并沒有呈現出顯著性表現,意味著性別并不會對關注度產生影響關系;年齡分為5個級別(60~65歲、65~70歲、70~75歲、75~80歲、90~85歲),將其按無序多分類變量作啞變量處理,各級別都和其中的第一個級別(60~65歲)進行比較,均無顯著影響。同理,文化程度作相同啞變量處理,也均無顯著影響。同樣,第一注視時間(=0.185> 0.05)、首次注視時長(=0.538>0.05)、第二注視時間(=0.290>0.05)、心率變異率(=0.063>0.05)都不會對關注度產生影響。
總注視時間的回歸系數值為–1.477,并且呈現出0.01水平的顯著性(=0.000<0.01),意味著總注視時間會對關注度產生顯著的負向影響。優勢比(Exp(B)值)為0.228,意味著當總注視時間增加一個單位時,關注度的變化(減少)幅度為0.228倍。同理,平均注視時間(=0.000<0.01)、注視次數(=0.000<0.01)會對關注度產生顯著的正向影響。
結果表明,總注視時間、平均注視時間、注視次數三項指標與老年人對于陪伴機器人外觀形態關注度的影響關系顯著性最強,并作為判別因子1、2、3在后期建立判別模型。
2.3 判別函數模型的建立與檢驗
2.3.1 建立判別函數模型
將二元Logistic回歸分析得出的1(總注視時間)、2(平均注視時間)、3(注視次數)作為訓練樣本的Fisher判別指標因子輸入SPSS中的Fisher判別模型,18位老年人為訓練樣本(Train),另找兩位老年人為測試樣本(Test),見表3。變量共提取了一個判別函數,特征值(即組間平方和與組內平方和之比)為1.005,典型相關系數為0.708,且可以解釋100%的方差,因此說明一個判別函數就足夠了。在對判別函數是否有效的檢驗中,得出sig小于0.05,說明提取的判別函數有效,可以使用,見表4。Fisher判別函數系數見表5。

表3 Fisher判別函數信息

表4 Fisher判別函數有效性檢驗結果
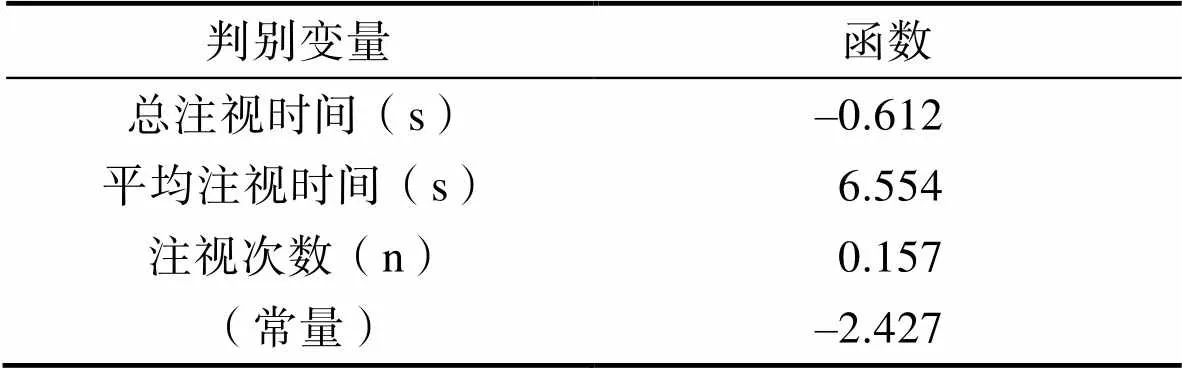
表5 Fisher判別函數系數
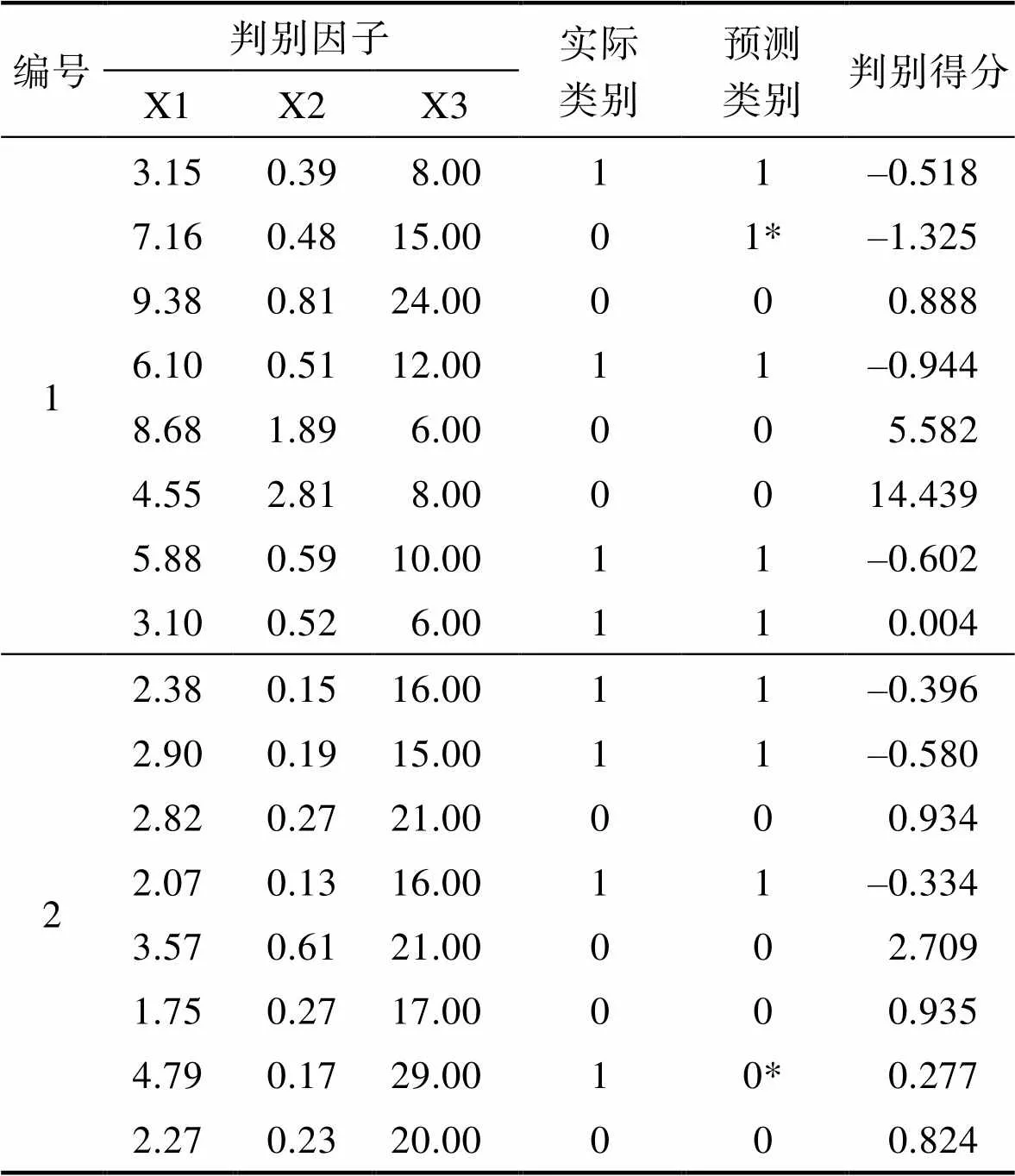
表6 測試樣本預測結果
注:*為誤分類個案
經計算得到其判別函數的系數及常量,最終Fisher判別函數計算如下:
(8)
2.3.2 判別函數模型檢驗
為了檢驗建立的Logistic-Fisher判別分析模型的有效性,請18名被測試者作為訓練樣本進行判別模型計算,并選取另外兩名老年人對上述函數模型進行檢驗,見表6。將調查問題進行簡化,以獲得判別函數在老年人群體二分類問題上的直觀表現。

表7 Fisher判別函數分類結果
注:正確分類的91.0%個原始已分組個案
Fisher判別函數分類結果見表7,待測樣本的預測結果與實際測評結果情況比較相符,判別的正確率為91.0%,表明Logistic-Fisher判別模型具有較高的可信性。因此,可認為基于Logistic-Fisher的老齡陪伴機器人外觀形態判別模型的正確率較高,比較可靠,可以運用到實際的老齡陪伴機器人的外觀設計中。
3 結語
為更好地設計出符合老年人喜愛的老齡陪伴機器人的外觀形態,本文以眼動追蹤技術為基礎,構建Logistic-Fisher判別模型。將18組老齡用戶眼動數據作為訓練樣本,2組用戶數據作為測試樣本,對老齡陪伴機器人外觀形態評價模型進行預測,得到以下結論。
1)本文運用二元Logistic回歸模型,探究影響老齡陪伴機器人外觀形態設計的顯著因子。對眼動實驗數據進行提取,得到8個眼動、心率變異性、被試變量等初始因子,再通過二元Logistic回歸對其進行分析,得出1(總注視時間)、2(平均注視時間)、3(注視次數)三個指標因子在眼動實驗中對機器人形態有顯著影響。
2)本文通過分析老年人的心理特征,將“老年人對老齡陪伴機器人的外觀評價”定義為二分類問題。將二元Logistic回歸模型得到的3個指標作為Fisher判別因子,構建判別函數,預測正確率達91.0%。
綜上所述,本研究通過提取老年人生理指標,運用二元Logistic回歸模型、Fisher判別模型等方法,得出老年人對老齡陪伴機器人外觀形態的評價。此研究流程簡化了實驗數據分析步驟,對日后老齡陪伴機器人外觀形態的設計具有指導意義。
[1] 武漢大學“十四五”時期人口相關政策研究課題組. 十四五”時期人口相關經濟社會政策的思考與建議[J/OL]. 中國人口·資源與環境, 2020, 30(6): 20-28.
Research Group on Population Related Policies in the 14th Five-year Plan Period of Wuhan University. Suggestions on Population-related Economic and Social Policies During the 14th Five-year Plan period[J/OL]. China Population, Resources and Environment, 2020(6): 20-28.
[2] 孫夢楚, 高煥沙, 薛群慧. 智慧養老產品開發現狀研究[J]. 經濟師, 2016(4): 36-38.
SUN Meng-chu, GAO Huan-sha, XUE Qun-hui. Research on the Development Status of Smart Elderly Care Products[J]. China Economist, 2016(4): 36-38.
[3] 李貴卿, 文革, 段黔冰. 智能機器人從事中國老年照顧服務的迫切性研究[J]. 四川勞動保障, 2017(S1): 64-66.
LI Gui-qing, WEN Ge, DUAN Qian-bing. Research on the Urgency of Intelligent Robots Engaging in China's Elderly Care Services[J]. Labor and Social Security, 2017(S1): 64-66.
[4] 郭伏, 丁一, 張雪峰, 等. 產品造型對用戶使用意向影響的事件相關電位研究[J]. 管理科學, 2015, 28(6): 95-104.
GUO Fu, DING Yi, ZHANG Xue-feng, et al. The Impact of Product Forms on User's Usage Intention with Event Related Potentials[J]. Journal of Management Science, 2015, 28(6): 95-104.
[5] 王秋惠, 楊悅. 基于QFD與RAHP的餐館服務機器人人因工程設計[J]. 圖學學報, 2019, 40(4): 739-745.
WANG Qiu-hui, YANG Yue. Methods of Human Robot Ergonomics Design of Restaurant Service Robot Based on QFD and RAHP[J]. Journal of Graphics, 2019, 40(4): 739-745.
[6] 朱彥. 基于感性工學的家庭服務機器人外形設計研究[J]. 包裝工程, 2015, 36(14): 50-54.
ZHU Yan. The Form Design of Home Service Robots Based on Kansei Engineering Theory[J]. Packaging Engineering, 2015, 36(14): 50-54.
[7] YA-HUEI W, CHRISTINE F, ANNE-SOPHIE R. Designing Robots for the Elderly: Appearance Issue and Beyond[J]. Archives of Gerontology & Geriatrics, 2012, 54(1): 121-126.
[8] INBAL D, HADAS E, MICHAL P, et al. Home Robotic Devices for Older Adults: Opportunities and Concerns[J]. Computers in Human Behavior, 2019, 98.
[9] 王秋惠, 魏玉坤, 劉力蒙. 康復機器人研究與應用進展[J]. 包裝工程, 2018, 39(18): 83-89.
WANG Qiu-hui, WEI Yu-kun, LIU Li-meng. Review of Rehabilitation Robot on Research and Application[J]. Packaging Engineering, 2018, 39(18): 83-89.
[10] 王秋惠, 張一凡, 劉力蒙. 老齡服務機器人人機界面設計研究進展[J]. 機械設計, 2018, 35(9): 105-113.
WANG Qiu-hui, ZHANG Yi-fan, LIU Li-meng. Advance in Human-Robot Interface design of service robot for the elderly[J]. Journal of Machine Design, 2018, 35(9): 105-113.
[11] 王濟川, 郭志剛. Logistic回歸模型—方法與應用[M]. 北京: 高等教育出版社, 2001.
WANG Ji-chuan, GUO Zhi-gang. Logistic Regression Model: Methods and Applications[M]. Beijing: Higher Education Press, 2001.
[12] 孟慶坤. 成安縣農戶秸稈還田意愿及影響因素研究[D]. 河北工程大學, 2018.
MENG Qing-kun. Study on Willingness and Influencing Factors of Straw Returning to Farmland in Cheng An county[D]. College of Landscape and Ecologlcal Engineering, 2018.
[13] 劉榮輝, 高陽, 張湛梅. 復雜電信社交網絡中家庭群體的識別與應用[J]. 工業工程與管理, 2016, 21(5): 105-110.
LIU Rong-hui, GAO Yang, ZHANG Zhan-mei. Family Group Recognition and Application in Complex Telecom Social Network[J]. Industrial Engineering and Management, 2016, 21(5): 105-110.
[14] 姜廣輝, 張鳳榮, 陳軍偉, 等. 基于Logistic回歸模型的北京山區農村居民點變化的驅動力分析[J]. 農業工程學報, 2007(5): 81-87.
JIANG Guang-hui, ZHANG Feng-rong, CHEN Jun-wei, et al. Analysis of the Driving Forces of Change of Rural Residential Areas in Beijing Mountainous Areas Based on Logistic Regression Model[J]. Transactions of the Chinese Society of Agricultural Engineering, 2007(5): 81-87.
[15] 杜謙, 范文, 李凱, 等. 二元Logistic回歸和信息量模型在地質災害分區中的應用[J]. 災害學, 2017, 32(2): 220-226.
DU Qian, FAN Wen, LI Kai, et al. Geohazard Susceptibility Assessment by Using Binary Logical Regression and Information Value Model[J]. Journal of Catastrophology, 2017, 32(2): 220-226.
[16] 盧兆麟, 李升波, 徐少兵, 等. 基于眼動跟蹤特征的汽車造型評價方法[J]. 清華大學學報(自然科學版), 2015, 55(7): 775-781.
LU Zhao-lin, LI Sheng-bo, XU Shao-bing, et al. Automobile Style Evaluation Based on Eye Tracking[J]. Journal of Tsinghua University(Science and Technology), 2015, 55(7):775-781.
[17] 李長興, 辛程鵬, 李回貴, 等. 基于Fisher-逐步判別法的煤與瓦斯突出預測[J]. 中國礦業, 2020, 29(7): 106-111.
LI Chang-xing, XIN Cheng-peng, LI Hui-gui, et al. Prediction of Coal and Gas Outburst Based on Fisher- stepwise Discriminant Analysis Method[J]. China Mining Magazine, 2020, 29(7): 106-111.
[18] 代雪珍, 衛軍超, 常在斌. 基于Fisher判別分析的分類模型研究[J]. 價值工程, 2018, 37(26): 211-213.
DAI Xue-zhen, WEI Jun-chao, CHANG Zai-bin. Research on Classification Model Based on Fisher Discriminant Analysis[J]. Value Engineering, 2018, 37(26): 211-213.
[19] 許亮, 彭屹. 心率變異性在反映心臟自主神經損傷和重構中的應用[J]. 中國生物醫學工程學報, 2007(4): 618-622.
XU Liang, PENG Yi. Heart Rate Variability Assessment of Cardiac Autonomic Nerve Damage and Remodeling[J]. Chinese Journal of Biomedical Engineering, 2007(4): 618-622.
[20] 吳佳佳. 參麥注射液治療氣陰兩虛型不穩定型心絞痛的療效觀察[D]. 南京中醫藥大學, 2011.
WU Jia-jia. The Clinical Observation on Treating Auxiliary of Unstable Angina of Qi and Yin Deficiency by Shenmai[D]. Nanjing University Of Chinese Medicine, 2011.
[21] 葛宏, 呂曉東, 范軍, 等. 飛行員飛行生理參數記錄檢測儀數據分析系統的研制[J]. 醫療衛生裝備, 2009, 30(2): 15-16.
GE Hong, LV Xiao-dong, FAN Jun, et al. Research of Data Analytic System of Physiological Parameters Detecting Device for Pilots[J]. Chinese Medical Equipment Journal, 2009, 30(2): 15-16.
[22] 李陳璇, 丁曉梅, 朱紅軍. 心率變異性分析在心血管疾病中應用的研究進展[J]. 中西醫結合心腦血管病雜志, 2020, 18(1): 82-84.
LI Chen-xuan, DING Xiao-mei, ZHU Hong-jun. Research Progress of Application of Heart Rate Variability Analysis in Cardiovascular Diseases[J]. Chinese Journal of Integrative Medicine on Cardio-Cerebrovascular Disease, 2020, 18(1): 82-84.
[23] 李龍. 血壓變異性與冠脈狹窄程度及急性冠脈缺血事件的相關性研究[D]. 安徽醫科大學, 2018.
LI Long. Study on the Relationship between Blood Pressure Variability, Coronary Artery Stenosis and Acute Coronary Ischemia[D]. Anhui Medical University, 2018.
[24] 陸泉.老年歧視在老齡產品設計中的多維解構[J]. 包裝工程, 2017, 38(2): 101-104.
LU Quan. The Multidimensional Deconstruction of Age Discrimination in the Design of Products Made for the Elderly[J]. Packaging Engineering, 2017, 38(2): 101-104.
[25] 劉暢, 郭伏, 劉瑋琳, 等. 老年人購物網站首頁界面感知可用性評價及預測[J]. 工業工程與管理, 2018, 23(6): 101-107.
LIU Chang, GUO Fu, LIU Wei-lin, et al. Evaluation and Prediction of the Elderly's Perceived Usability of Shopping Website Homepage Interface[J]. Industrial Engineering and Management, 2018, 23(6): 101-107.
[26] 劉征宏, 潘偉杰, 呂健, 等. 基于因子分析和聚類分析的情感維度提取[J]. 組合機床與自動化加工技術, 2016(3): 4-8.
LIU Zheng-hong, PAN Wei-jie, LV Jian, et al. Affective Dimensions Selection Based on Factor Analysis and Cluster Analysis[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2016(3): 4-8.
Appearance Evaluation Method of the Elderly Companion Robot Based on Logistic-Fisher
WANG Qiu-hui1,2, ZHANG Qian-nan1
(1.School of Mechanical Engineering, Tiangong University, Tianjin 300387, China; 2.School of Economics and Management, Tianjin Polytechnic University, Tianjin 300387, China)
The purpose of this paper is to propose a method for evaluating the appearance of an elderly companion robot based on eye tracking. Obtain the eye movement characteristics of the elderly when watching the companion robot through eye movement experiments, extract eye movement indicators, heart rate indicators and test variables, and use SPSS23.0 software platform to perform descriptive statistics and binary Logistic regression analysis on the variable information. Secondly, the appearance evaluation of the companion robot is defined as a two-category problem based on the physiological and psychological particularity of the elderly. Several factors with the strongest influence in the regression are used as the discriminant factors to establish a Fisher discriminant function model and perform experimental verification. Gender, age, education level, and heart rate indicators have no significant effect on the appearance attention of the companion robot; the total fixation duration has a significant negative effect, and the average fixation duration and the number of fixations have a significant positive effect. The accuracy of the discriminant model prediction sample compared with the actual sample is 91.0%. The Logistic-Fisher method is generally highly accurate, and it provides a feasible technical way to realize the appearance design evaluation of the elderly companion robot.
the elderly companion robot; appearance evaluation; eye tracking; binary Logistic regression; Fisher discriminant model
TB472
A
1001-3563(2022)02-0082-08
10.19554/j.cnki.1001-3563.2022.02.011
2021-09-20
教育部人文社會科學規劃基金項目(19YJAZH093)
王秋惠(1969—),女,山東人,博士,天津工業大學機械工程學院教授,主要研究方向為工業設計、智能人因學、設計人因學、機器人人因工程及人機界面設計。
猜你喜歡
保健醫苑(2022年1期)2022-08-30 08:40:44
保健醫苑(2022年6期)2022-07-08 01:25:16
科教新報(2022年17期)2022-05-24 04:34:52
保健醫苑(2022年4期)2022-05-05 06:11:20
汽車實用技術(2022年7期)2022-04-20 11:44:42
載人航天(2021年5期)2021-11-20 06:04:32
華人時刊(2021年23期)2021-03-10 23:59:17
雜文月刊(2019年16期)2019-09-25 06:56:36
海峽姐妹(2018年1期)2018-04-12 06:44:24
外語學刊(2016年4期)2016-01-23 02:34:15