考慮工況和駕駛風格耦合影響的插電式混合動力汽車制動能量回收策略
2022-01-27 07:53:36邱明明曹龍凱
中國機械工程 2022年2期
邱明明 虞 偉 趙 韓 劉 浩 曹龍凱
1.合肥工業大學機械工程學院,合肥,2300092.汽車技術與裝備國家地方聯合工程研究中心,合肥,230009
0 引言
制動能量回收是混合動力汽車能量管理的重要組成部分,其本質是根據工況和駕駛員的駕駛意圖來確定制動能量回收強度,并在此基礎上根據電機動態特性進行優化,從而實現能量回收的最大化[1]。
國內外學者對制動能量回收進行了大量研究。PAUL等[2]基于模糊邏輯估計輪胎-路面摩擦因數的方法,提出了一種單電機四輪驅動汽車的制動力分配策略。XIONG等[3]基于電機損耗模型和數據計算,建立了優化電機制動力矩分布模型,揭示了前后電動機構功率優化的分布規律。XIAO等[4]考慮電池充電狀態、制動強度和電機轉速的影響,提出了一種基于多輸入模糊控制邏輯的再生制動分配策略。XU等[5]基于模型預測控制理論,設計了模型預測控制器并驗證了其優越性。WANG等[6]研究了多目標、多約束條件下制動力的優化分配方法,提高了制動模式切換時的制動穩定性。郭志軍等[7]通過分析制動力安全分配區域,提出了一種再生制動模糊控制策略。郭金剛等[8]制定了包含制動力分配和最優制動強度控制的再生制動能量回收最優控制策略,實現了制動單次工況能量回收率最優。嚴運兵等[9]通過合理分配前后軸上機械制動力與電機制動力的比例,達到提高能量回收率的目的。王虎[10]根據制動強度將制動情況分成四種類型并給出了每種類型所需的制動力,改善了能量回收的效果。武蘇杭等[11]將制動模式按車速和制動意圖分為六種模式,建立了基于安全修正系數的制動能量回收策略。李勝琴等[12]依據不同制動強度設計電機的再生制動力與前軸制動力的分配比例,有效地增加了電動汽車的續航里程。姜濤等[13]提出以前后電機總損失功率為目標函數的轉矩分配系數計算方法,明顯減少了能量消耗。黃文強等[14]通過改變制動速度來改變制動功率,進而減少了制動電阻上的功率消耗,提高了超級電容的回收能量。魯楠等[15]通過建立優化目標和轉矩分配的博弈模型,構造制動轉矩分配問題的多目標優化代價函數,實現了制動力矩的合理分配并延長了電池的使用壽命。
綜上所述,雖然目前關于制動能量回收的研究已取得豐碩的成果,但多數只考慮了駕駛員、工況或電機效率等單一因素,未考慮多因素耦合的影響,制動能量回收的效果未達最佳,因此,研究多因素耦合影響下的制動能量回收方法十分必要。
本文首先利用實驗平臺對車速、踏板等信號進行采集,并對工況和駕駛風格特征參數進行計算;然后考慮工況和駕駛風格對制動能量回收的耦合影響,引入工況修正因子α和駕駛風格修正因子β對電機實際提供的制動力進行修正,并通過正態分布與t分布的統計方法確定α和β的變化范圍;進一步,建立工況和駕駛風格學習向量量化(learning vector quantization,LVQ)神經網絡,并根據工況和駕駛風格的識別結果建立制動能量回收策略;最后,建立車輛仿真模型,針對不同工況對本文所制定的能量回收策略的有效性進行對比驗證。
1 工況和駕駛風格數據采集
本文通過駕駛員在環實驗獲取工況和駕駛風格的數據。模擬駕駛實驗平臺如圖1所示,實時采集制動、油門踏板和車速數據。

圖1 駕駛員在環實驗平臺Fig.1 Driver-in-loop experiment platform
實驗選取城市循環道路工況,道路的擁堵情況通過模擬平臺的3D Instructor 2軟件進行設置,分別設置暢通工況(Straightway)、中速工況(Med-Speed)、低速工況(Low-Speed)和擁堵工況(Congestion)四種,在這四種工況下對44位駕駛員進行駕駛員在環實驗,在進行實驗之前已對該44位駕駛員的日常駕駛行為數據進行采集和分析,根據參與實驗的44位駕駛員平時的駕駛特點將其分為謹慎型(Calm)、穩健型(Normal)和激進型(Aggressive)三組(其中,謹慎型14名,穩健型20名,激進型10名),分別采集加速踏板行程、制動踏板行程和車速等數據,共采集有效數據176組。
為表征不同擁堵工況類型,本文選取了12個特征參數,經過分析計算,獲得每組數據工況特征參數值,如表1所示。

表1 工況特征參數
同一類駕駛風格在不同工況下會表現出不同特征,為此,需要對不同工況下的駕駛風格特征參數進行分析。事先分組的駕駛員在四種不同工況下進行在環實驗,選取17個特征參數來表征駕駛風格,經過分析計算獲得不同工況下不同駕駛風格的特征參數取值,如表2所示。
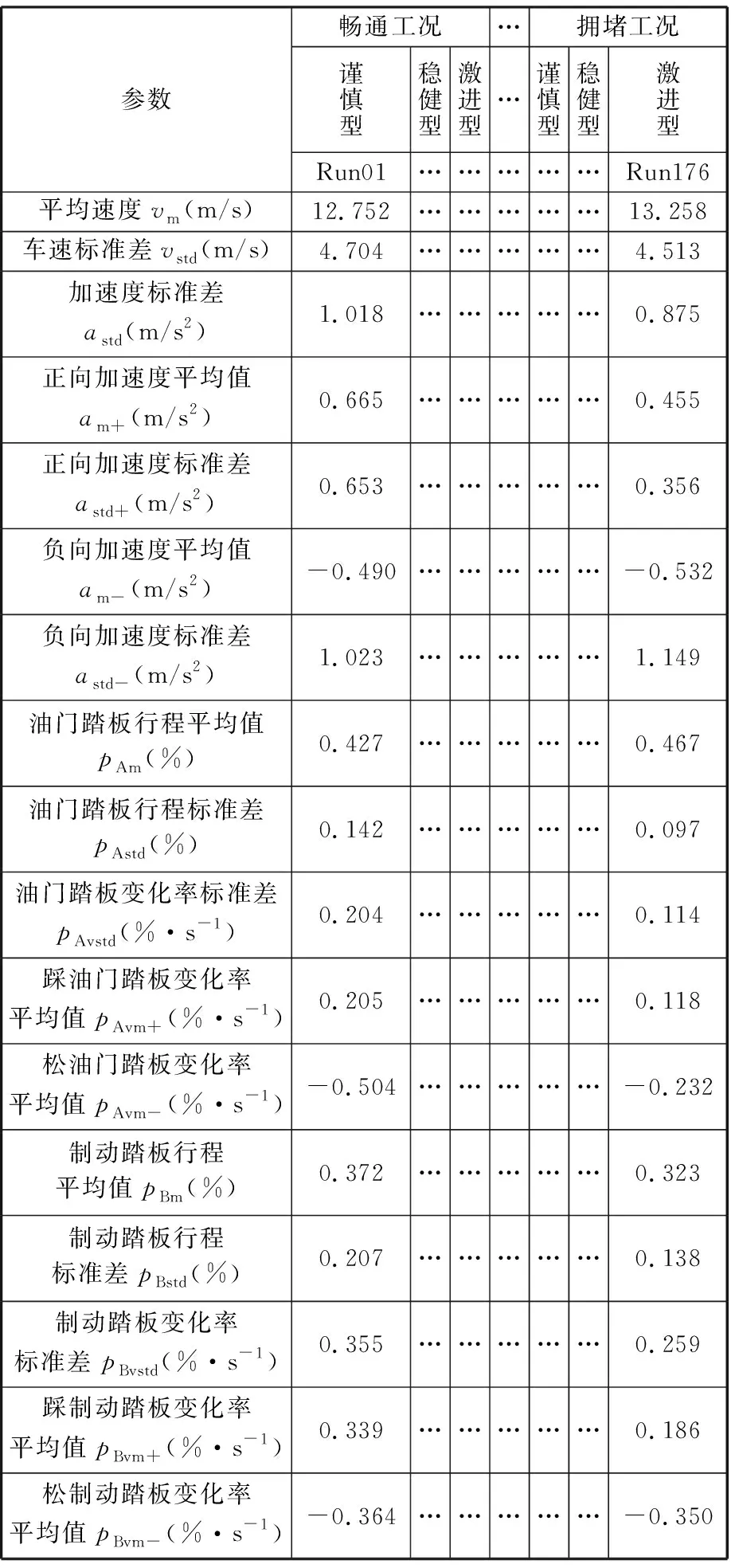
表2 駕駛風格特征參數
2 最大再生制動力修正因子
當電機參與車輛制動時,為了保證車輛制動時的穩定性,需要限制電機實際提供的制動力,因此,本文考慮工況和駕駛風格對車輛制動穩定性的影響,將不同工況下電機實際提供的最大制動力與電機所能提供的最大制動力的比值定義為工況修正因子α,計算公式為
(1)
式中,Fmax,c為對應工況下實際最大制動力;Fmax為電機能夠提供的最大制動力。
將不同駕駛風格下實際最大制動力與對應工況下實際制動力算術平均值的比值定義為駕駛風格修正因子βij(i=1,2,3,4;j=1,2,3),下標i分別表示擁堵工況、低速工況、中速工況以及暢通工況,下標j分別表示謹慎型、穩健型、激進型駕駛風格。駕駛風格修正因子β的計算公式為
(2)
Fc=(Fmax+Fmin)/2
(3)
式中,Fc為對應工況下實際制動力的算術平均值;Fmin為對應工況下實際制動力的最小值;Fmax,lim為根據工況和駕駛風格修正后的實際最大制動力。
2.1 工況修正因子
平均速度能夠在一定程度上反映工況的擁堵程度,如擁堵程度相對較高的工況則平均速度相對較小,因此,本文通過統計四種工況平均速度的區間來確定工況修正因子α的范圍。由于四種工況的數據量較大,且對數據進行KS檢驗后發現滿足正態分布規律,因此使用正態分布的統計方法對平均速度進行分析,進而通過標準化方法確定工況修正因子α的范圍。擁堵程度越高的工況越應注重其制動穩定性,故其實際最大制動力應越小。因此,標準化原則為:工況的擁堵程度越高,則α的取值越小,在本文中越接近0。具體步驟如圖2所示。
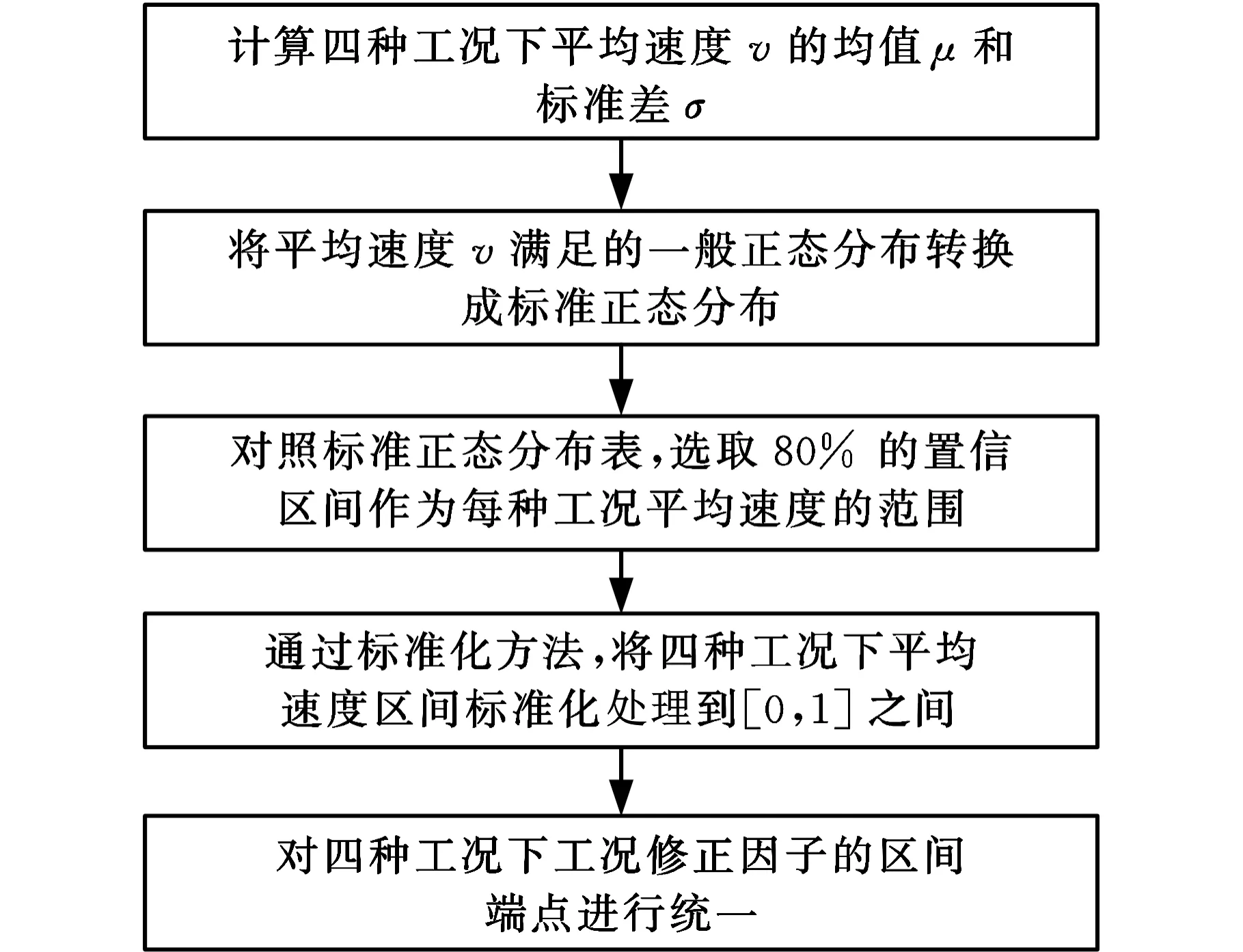
圖2 工況修正因子確定步驟Fig.2 Calculation procedure of the driving cyclecorrection factors
根據圖2所示步驟,四種工況下工況修正因子的范圍為:0<α1<0.22,0.22<α2<0.57,0.57<α3<0.68,0.68<α4<1。其中,αi(i=1,2,3,4)分別表示擁堵工況、低速工況、中速工況以及暢通工況的修正因子。
2.2 駕駛風格修正因子
就同一種工況而言,駕駛風格越激進的駕駛員駕駛車輛時,一個駕駛循環的制動踏板行程的平均值就越大,因此,駕駛風格修正因子可以通過對制動踏板行程平均值的統計來確定。由t分布的性質可知:對少量符合正態分布規律的樣本可以考慮采用t分布的統計方法進行統計[16]。因此,本文首先采用t分布對制動踏板行程平均值的數據進行分析,進而通過標準化方法分別確定每種工況下三種駕駛風格修正因子β的范圍。駕駛風格越激進,越應注重其制動時的制動穩定性,其電機實際參與的最大制動力應越小。因此,標準化原則為:駕駛風格的激進程度越高,則β的取值越小,在本文中越接近0。具體步驟如圖3所示。

圖3 駕駛風格修正因子確定步驟Fig.3 Calculation procedure of the driving stylecorrection factors
根據圖3所示步驟得到12種駕駛風格修正因子范圍:0<β13<0.39,0.39<β12<0.74,0.74<β11<1;0<β23<0.4,0.4<β22<0.64,0.64<β21<1;0<β33<0.4,0.4<β32<0.64,0.64<β31<1;0<β43<0.48,0.48<β42<0.71,0.71<β41<1。βij中的i(i=1,2,3,4)分別對應四種工況,j(j=1,2,3)分別對應三種駕駛風格。
3 制動能量回收策略制定
3.1 工況和駕駛風格識別LVQ神經網絡


圖4 LVQ神經網絡結構Fig.4 LVQ neural network structure
本文取vm、vmax、am+、amax+、amax-、Pa、Pi工況特征參數數據作為訓練工況LVQ神經網絡的輸入;針對每種工況,取駕駛風格特征參數pAvm+、pAvm-、pBm、pBvm+、pBvm-作為訓練駕駛風格LVQ神經網絡的輸入。以50 s為識別周期,首先對工況進行識別,然后在當前識別工況類型下,利用駕駛風格LVQ神經網絡識別模型對駕駛風格進行識別。將識別結果傳遞給制動能量回收策略模型,匹配對應的制動能量回收策略。
3.2 考慮工況和駕駛風格耦合影響的制動能量回收策略
復合制動過程,即有再生制動力參與時,應綜合考慮車輛的制動穩定性和能量回收效率[18]。不同的工況和駕駛風格對制動穩定性和能量回收效率有很大影響。由于相同的駕駛風格在不同工況下所表現出的特征參數有很大不同,如同一組駕駛風格特征參數在擁堵工況下表現的是穩健型駕駛風格,而在不需要頻繁松踩踏板的暢通工況下表現的可能是激進型駕駛風格,所以,在識別駕駛風格時,需根據不同工況下的駕駛風格特征參數進行識別。因此,本文建立了四種工況下不同駕駛風格的識別模型,制定了基于工況和駕駛風格耦合影響的制動能量回收策略,如圖5所示。
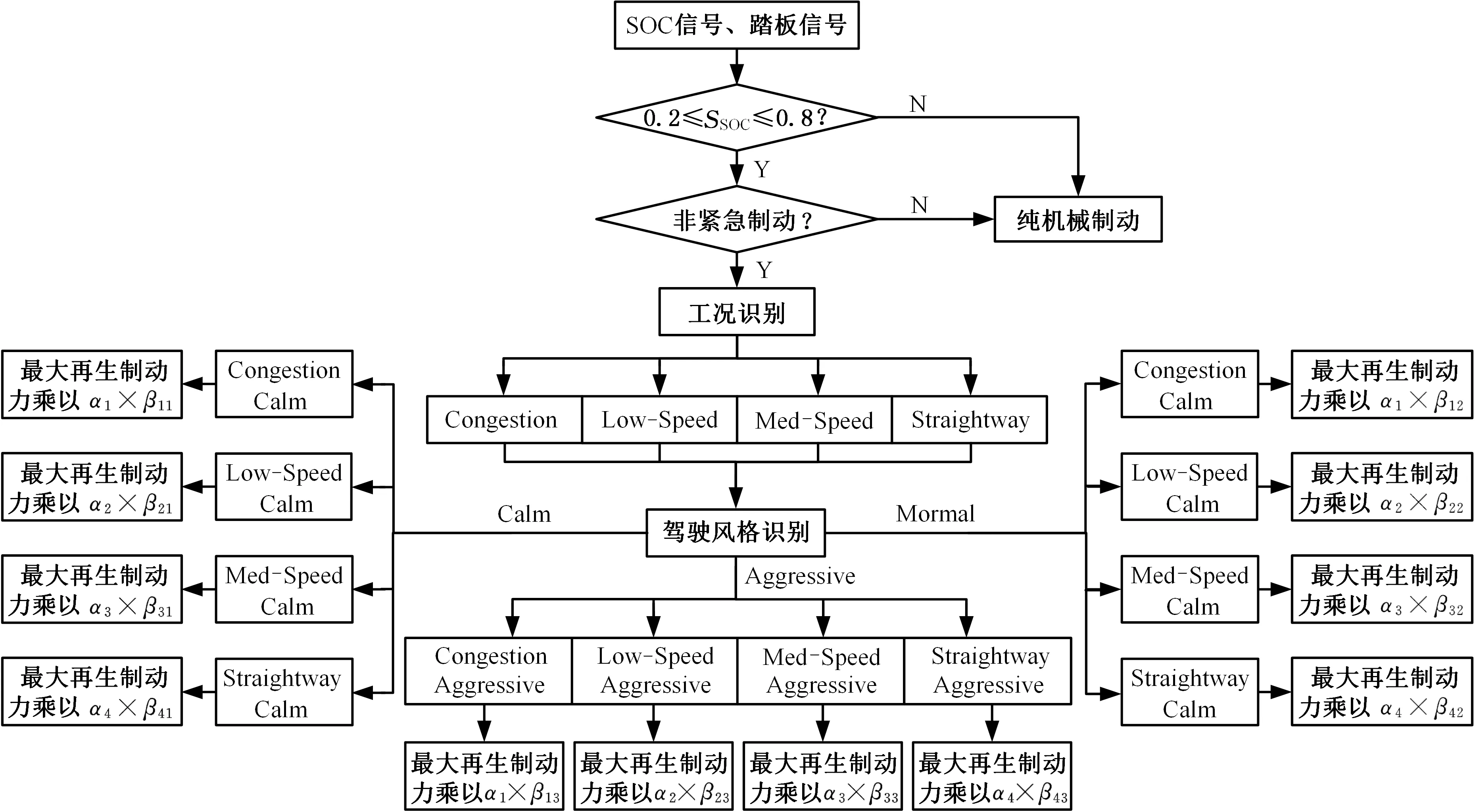
圖5 制動能量回收策略流程圖Fig.5 Flow chart of braking energy recovery strategy
當車輛制動時,控制系統根據實時電池荷電狀態(SOC)信號以及制動強度信號判斷是否需要再生制動力參與,將汽車的制動模式分為純機械制動模式和復合制動模式。
(1)純機械制動模式。制動過程中,若SOC值SSOC≤0.2或SSOC≥0.8或制動強度z≥0.7時,則所需制動力全部由機械制動力提供。
(2)復合制動模式。若0.2≤SSOC≤0.8且制動強度z<0.7,則制動力由再生制動力和機械制動力共同提供。
本文按工況和駕駛風格識別結果將復合制動模式分為暢通工況謹慎型制動模式、暢通工況穩健型制動模式、暢通工況激進型制動模式、中速工況謹慎型制動模式、中速工況穩健型制動模式、中速工況激進型制動模式、低速工況謹慎型制動模式、低速工況穩健型制動模式、低速工況激進型制動模式、擁堵工況謹慎型制動模式、擁堵工況穩健型制動模式和擁堵工況激進型制動模式共12種制動模式。
當車輛處于復合制動模式時,前后軸制動力的分配如圖6所示,其中A點表示依據工況和駕駛風格修正后實際最大制動力。再生制動控制模塊接收工況和駕駛風格的識別結果,根據識別結果修正實際最大制動力:
Fmax,lim=Fmaxαβ
(4)

圖6 復合制動時前后軸制動力分配Fig.6 Braking force distribution curve of front andrear axles during compound braking
當車輛處于圖6中的制動階段1時,制動所需的全部制動力小于修正后電機實際提供的最大制動力,此階段前后軸制動力的分配為
(5)
式中,Fbf為前軸制動力;Fbr為后軸制動力。
當車輛處于圖6中的制動階段2時,修正后的電機實際提供的最大制動力不能滿足制動所需的全部制動力,則不足的制動力由機械制動力補充,此階段前后軸制動力按固定比例分配:
(6)

(7)
式中,Fbfh為前軸機械制動力;Fbrh為后軸機械制動力;γ為前軸制動力占總制動力的比例。
4 制動能量回收仿真試驗研究
4.1 車輛仿真模型的搭建
首先在MATLAB/Simulink中建立圖7所示的車輛仿真模型。其中,Acc_cmd、Bra_cmd分別表示駕駛員模型(Fuzzy PID Driver)輸出的油門踏板信號和制動踏板信號;Cycle、Style表示工況和駕駛風格識別模型(Cycle and Style Recognition)的識別結果;結果傳遞到能量管理策略模型(Energy Management Strategy),輸出對離合、電機和發動機的控制信號。整車參數如表3所示。

圖7 整車仿真模型Fig.7 Vehicle simulation model

表3 車輛模型主要參數
4.2 工況和駕駛風格識別模型
工況識別模型接收來自車輛運動學模型傳來的實時車速信號,駕駛風格識別模型接收來自駕駛員模型輸出的油門踏板和制動踏板信號,經過計算得到工況和駕駛風格識別所需的輸入參數后,判斷仿真時間是否是50 s的整數倍,如果是則進行工況識別,輸出的識別結果作為工況修正因子的確定依據。由于不同工況下駕駛風格的識別參數不同,因此,在對駕駛風格進行識別時需要根據工況識別結果選擇對應工況下的駕駛風格LVQ神經網絡識別參數進行識別,并輸出駕駛風格的識別結果作為駕駛風格修正因子確定的依據。識別流程見圖8。

圖8 LVQ神經網絡識別工況和駕駛風格的流程Fig.8 Steps to identify driving cycle and driving styleby LVQ neural network
4.3 仿真結果對比分析
為驗證本文提出的制動能量回收策略的有效性,以實驗數據合成的隨機工況、UDDS工況以及NEDC工況作為仿真工況,以車速跟蹤、電池SOC變化和再生制動力參與等情況作為評價指標,將本文所提出的能量回收策略與固定比例的制動能量回收策略和基于車速和制動強度的制動能量回收策略進行對比。
仿真時,工況修正因子和駕駛風格修正因子取值如下:α1=0.21,α2=0.39,α3=0.63,α4=0.69;β13=0.38,β12=0.57,β11=0.75;β23=0.39,β22=0.52,β21=0.65;β33=0.39,β32=0.52,β31=0.65;β43=0.47,β42=0.59,β41=0.72。將電池SOC的初始值分別設置為80%和30%,對電量消耗模式(CD)和電量維持模式(CS)分別進行仿真分析。
4.3.1工況和駕駛風格識別結果分析
圖9為在給定的隨機工況、UDDS及NEDC工況下車速跟蹤曲線。從整體上看,本文的車輛模型在三組工況下均能較準確地跟蹤目標車速。
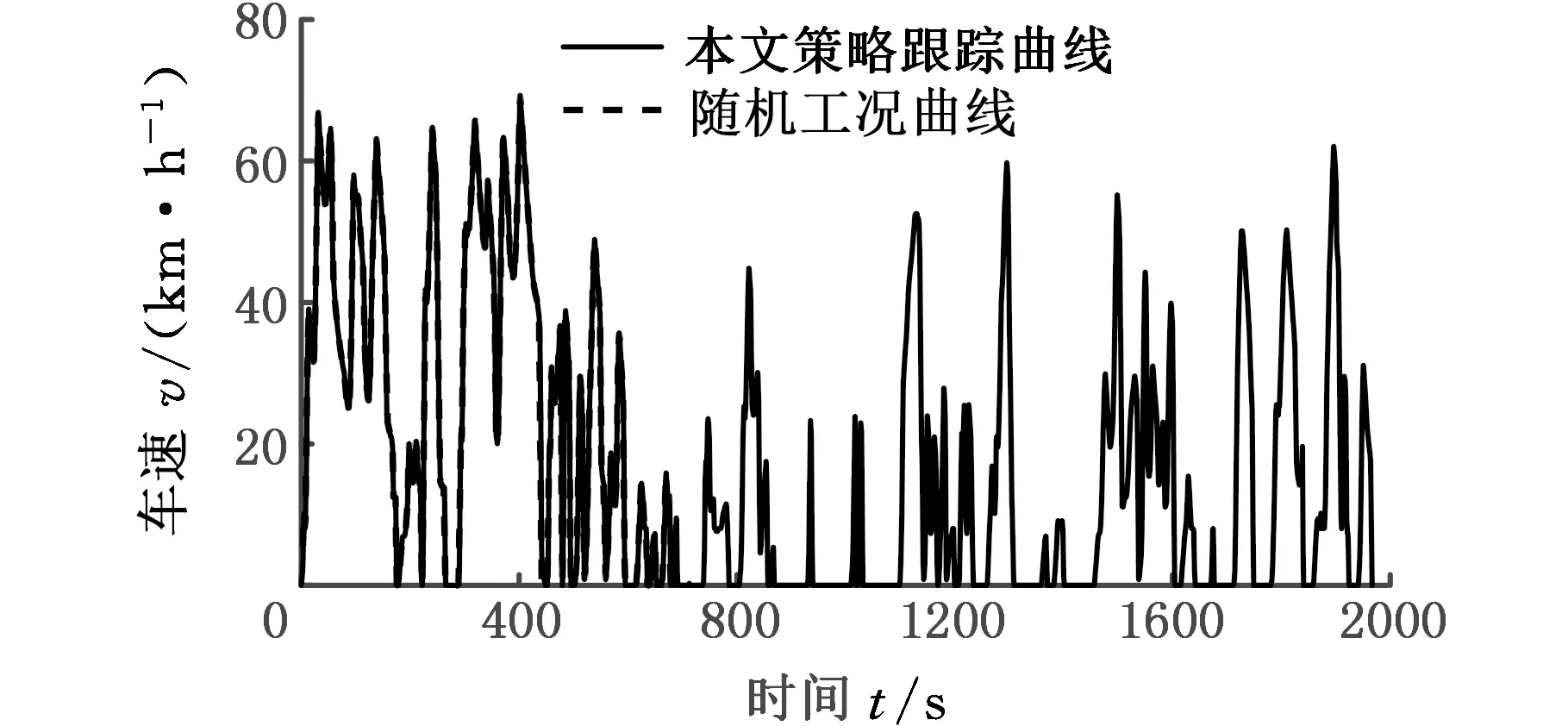
(a)隨機工況
圖10所示為三種工況下工況和駕駛風格的識別結果。其中,工況類型中的1、2、3、4分別表示擁堵工況、低速工況、中速工況和暢通工況,駕駛風格中的1、2、3分別表示謹慎型、穩健型和激進型。從識別結果可以看出,三種工況的工況類型識別結果大多處于中速工況和暢通工況;隨機工況和NEDC工況的駕駛風格識別結果大多處于謹慎型,UDDS工況識別結果大多處于謹慎型和激進型,三種實驗工況的工況類型和駕駛風格都是多變的。

(a)隨機工況
4.3.2電池SOC對比分析
圖11為電量消耗(CD)模式下電池SOC變化對比曲線,可以看出,在所給定的三種工況下,本文提出的能量回收策略在能量回收效果方面具有明顯的優越性。相對于本文所提出的策略,在暢通工況謹慎駕駛風格的情況下,固定比例的制動能量回收策略會導致電機過早地退出制動能量回收,無法完全發揮其回收能量的優勢。結合圖11和表4可以看出,效果最顯著的是UDDS工況,而NEDC工況只在最后階段能量回收效果較明顯,主要原因是之前所有制動都相對平緩,低速工況穩健型制動模式下電機提供的制動力能夠滿足制動需求,最后一段制動則滿足不了,本文制動策略的優勢才展現出來。而相較于采用基于車速和制動強度的制動能量回收策略,本文策略在UDDS工況下的能量回收效果仍舊顯著。

(a)隨機工況

表4 CD模式下電量消耗情況對比
圖12給出了電量保持(CS)模式下SOC曲線和油耗曲線。結合圖12和表5可以看出,在電量保持模式下,本文提出的制動能量回收策略相比固定比例的制動能量回收策略具有明顯的優勢。在隨機工況和UDDS工況下節油效果非常明顯,雖然在NEDC工況下的表現和固定比例制動能量回收策略油耗相同,但是電池SOC卻增加了。相較于采用基于車速和制動強度的制動能量回收策略,本文策略的節油效果顯著。總體來說,在電量保持和電量消耗模式下,本文提出的制動能量回收策略相對于固定比例和基于車速和制動強度的制動能量回收策略具有明顯的優勢,能充分發揮出混合動力汽車的節能特性。

(a)隨機工況

表5 CS模式下電耗和油耗對比
4.3.3再生制動力矩對比分析
三種工況下再生制動力矩對比如圖13所示,相比于固定比例的制動能量回收策略,在隨機工況和UDDS工況下,本文策略下的再生制動力所占的比例遠高于固定比例的制動能量回收策略,這是兩種工況下能量回收效果顯著的主要原因。而在NEDC工況中,兩種策略的再生制動比例相差不大,更能進一步解釋在NEDC工況下,本文制動能量回收效果不顯著的問題。此外,本文策略在UDDS工況下的再生制動力所占的比例遠高于基于車速和制動穩定性的制動能量回收策略。

(a)隨機工況
5 結論
(1)針對混合動力汽車制動能量回收的制動安全及能量回收效率等問題,提出了考慮工況和駕駛風格耦合影響的混合動力汽車制動能量回收策略。通過引入工況修正因子與駕駛風格修正因子,降低了電機再生制動力在擁堵工況、激進型駕駛風格下的參與程度,提高了電機再生制動力在暢通工況、謹慎型駕駛風格下的參與程度,從而在保證制動穩定性的同時,提高了混合動力汽車的能量回收效率。
(2)搭建了混合動力汽車仿真模型,并對提出的策略與固定比例制動能量回收策略及基于車速和制動強度的制動能量回收策略進行仿真對比分析,驗證了提出的再生制動力控制策略的優越性。對于給定的隨機工況和UDDS工況,本文提出的制動能量回收策略相對于固定比例的制動能量回收策略,在制動穩定性和能量回收效果方面有更好的表現,且能量回收效率有了顯著的提高,能夠有效地提高混合動力汽車的行駛里程;對于NEDC工況,本策略所展現出來的能量回收效果有限,但不影響其參考價值。而相對于基于車速和制動強度的制動能量回收策略,本文所提出的制動能量回收策略同樣具有優越性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·高一版(2020年3期)2020-04-21 08:03:20
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
數學大世界(2018年1期)2018-04-12 05:39:14
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
