電磁作動器出力特性及自適應(yīng)抑制算法
2022-01-27 14:15:58張慶偉閆政濤楊理華
振動與沖擊 2022年1期
關(guān)鍵詞:信號
張慶偉, 俞 翔, 閆政濤, 楊理華
(1.海軍工程大學(xué) 動力工程學(xué)院,武漢 430033;2.海軍工程大學(xué) 艦船與海洋學(xué)院,武漢 430033;3.江漢大學(xué) 智能制造學(xué)院,武漢 430056;4.海軍潛艇學(xué)院 動力操縱系,山東 青島 266199;5.中國科學(xué)院聲學(xué)研究所 噪聲與振動重點(diǎn)實(shí)驗(yàn)室,北京 100190)
船用機(jī)械設(shè)備運(yùn)轉(zhuǎn)產(chǎn)生的振動會在海水中形成復(fù)雜的低頻線譜噪聲[1]。隔振是降低機(jī)械振動傳遞的有效途徑之一,被動隔振在中高頻段表現(xiàn)較好[2],但無法滿足艦船機(jī)械設(shè)備低頻振動隔離要求。主動隔振技術(shù)通過附加力源可有效抑制低頻振動,目前國內(nèi)外已展開諸多研究[3-4]。
Zhang等[5]設(shè)計(jì)了一種主動壓電式作動器和橡膠被動隔振器相結(jié)合的混合隔振器,結(jié)構(gòu)緊湊可靠性高,實(shí)現(xiàn)了共振頻率振幅明顯降低。Zhang等[6]設(shè)計(jì)了一種基于麥克斯韋法向應(yīng)力的新型負(fù)剛度電磁作動器,可以提高靜剛度下的低頻隔振效果。劉露等[7]設(shè)計(jì)了一種壓電式作動器有效抑制了飛行器振動對儀器儀表的干擾。但以上作動器難以滿足對重量大、振動劇烈的船用機(jī)械設(shè)備隔振。李彥等[8]設(shè)計(jì)了一種空氣彈簧和磁懸浮作動器相結(jié)合的一體化隔振器,但磁懸浮作動器出力線性度較差,需要進(jìn)行非線性補(bǔ)償,增加了控制難度。電磁式作動器能夠較好解決上述問題,通過輸出作用力來抵消線譜振動,適用于艦船設(shè)備的主動隔振。電磁作動器在一定范圍內(nèi)輸出力與激勵保持線性關(guān)系,但受永磁體磁化強(qiáng)度限制,隨激勵增大將導(dǎo)致作動器進(jìn)入飽和區(qū)。當(dāng)控制系統(tǒng)受到強(qiáng)烈干擾時,將輸出較大控制信號,容易超出作動器工作電流范圍,導(dǎo)致隔振系統(tǒng)失效。為提高電磁作動器性能,石慧等[9]對作動器動子或定子形態(tài)、氣隙、倒角形式和線圈匝數(shù)等進(jìn)行了優(yōu)化分析;寧一高等[10]通過在不同工況下改變作動器的剛度降低力傳遞率來提高隔振效果;馬建國等[11]以降低鐵損耗和銅損耗為目標(biāo),對永磁體參數(shù)、磁極尺寸和匝數(shù)進(jìn)行了調(diào)整。但始終因磁飽和現(xiàn)象,無法實(shí)現(xiàn)在強(qiáng)烈干擾或沖擊下的主動隔振。
本文對電磁作動器進(jìn)行了仿真和試驗(yàn)分析,為保證在強(qiáng)烈干擾下系統(tǒng)實(shí)現(xiàn)有效控制,提出了自適應(yīng)抑制算法,仿真和試驗(yàn)結(jié)果表明,該算法較好解決了作動器飽和影響,對雙頻激勵取得了顯著的控制效果,在受到?jīng)_擊時展現(xiàn)了較強(qiáng)的抗干擾能力。
1 電磁作動器
1.1 結(jié)構(gòu)分析
電磁作動器由定子鐵芯、線圈、永磁體、動子鐵芯、簧片和動子芯軸等組成。其原理為線圈通入交流電產(chǎn)生交變磁場與永磁體恒定磁場相互作用輸出電磁力。其內(nèi)部結(jié)構(gòu)和動力學(xué)模型如圖1所示。

(a) 作動器結(jié)構(gòu)圖

(b) 動力學(xué)模型圖1 電磁作動器結(jié)構(gòu)圖及力學(xué)模型
作動器的動力學(xué)方程為
(1)

K(jω)I
(2)
式中:Br為永磁體剩余磁化強(qiáng)度;μ0為空氣磁導(dǎo)率;αleak為漏磁系數(shù);agap為氣隙寬度;h為氣隙高度;l為永磁體高度;dmov為動子外徑;wpm為永磁體厚度;RAC(jω)為交流磁路磁阻;Rmov(jω)為永磁體磁阻。由式(2)可知,電磁出力與電流保持線性關(guān)系。
1.2 磁路仿真
基于COMSOL中AC/DC模塊磁場(mf)接口對作動器磁路結(jié)構(gòu)進(jìn)行電磁仿真。運(yùn)用麥克斯韋張量法進(jìn)行有限元分析,表達(dá)式為
?·B=0
?·D=ρ

(3)
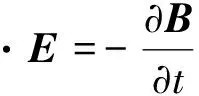
式中:J表示電流密度;ρ表示剩余電荷密度;D表示電位移矢量;E表示電場強(qiáng)度;本構(gòu)關(guān)系為D=ε0εrE;B表示磁感應(yīng)強(qiáng)度,H表示磁場強(qiáng)度,本構(gòu)關(guān)系為B=μ0μrH+Br。各參數(shù)設(shè)置情況如表1所示。進(jìn)行網(wǎng)格剖分,為保證計(jì)算精確,在出力區(qū)域細(xì)化處理。添加頻域計(jì)算,得到磁路仿真圖如圖2所示,色譜表示磁通密度模,線上箭頭表示磁路方向。
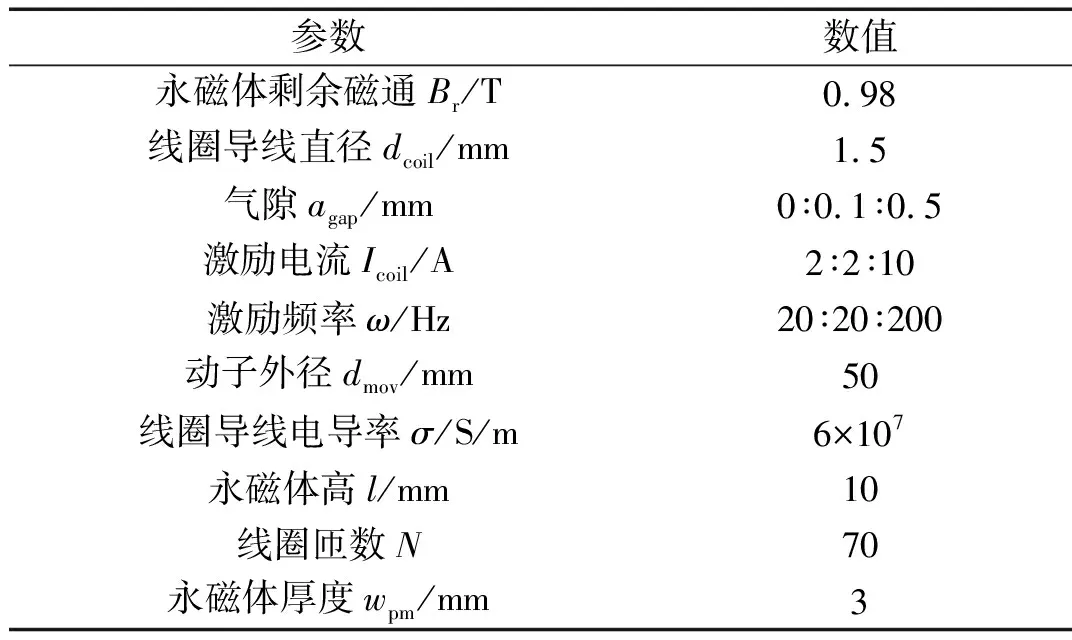
表1 磁路模型主要參數(shù)設(shè)置情況
對結(jié)果進(jìn)行后處理,研究氣隙寬度agap對電磁輸出力的影響,結(jié)果如圖3所示。各激勵頻率在agap=0.3 mm輸出力達(dá)到最大值。在6 A電流、20 Hz頻率激勵下,輸出力能夠達(dá)到130 N。

圖2 電磁作動器磁路仿真圖Fig.2 Magnetic circuit simulation diagram of electromagnetic actuator
圖3 電磁作動器出力隨氣隙寬度變化值
研究電磁輸出力和電流、頻率關(guān)系,得到結(jié)果如圖4所示,仿真結(jié)果符合理論定性分析,電磁輸出力與電流保持線性關(guān)系。

圖4 電磁作動器輸出力隨電流變化關(guān)系Fig.4 The relationship between the output force of the electromagnetic actuator and the current
1.3 出力測試
電磁力的輸出需要經(jīng)過動子鐵芯和簧片等機(jī)械元件才能到達(dá)隔振設(shè)備,搭建了電磁作動器出力性能的測試工裝,示意圖如圖5所示。
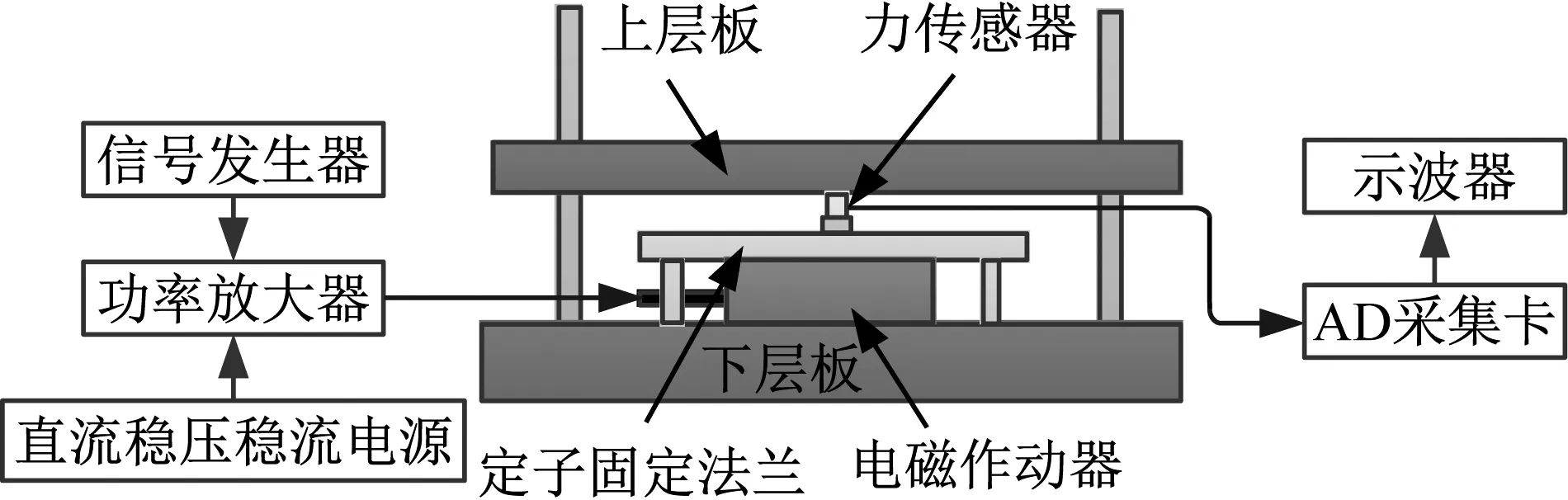
圖5 電磁作動器出力性能測試工裝Fig.5 Electromagnetic actuator output performance test tool
信號發(fā)生器按照一定的掃描方式輸出不同頻率、不同電流的正弦激勵給功率放大器,驅(qū)動電磁作動器,ICP型力傳感器對拉壓力進(jìn)行測量,傳感器內(nèi)置了專門的集成調(diào)理電路,AD采集板卡對力信號完成采集。得到輸出力測試結(jié)果如圖6和7所示。
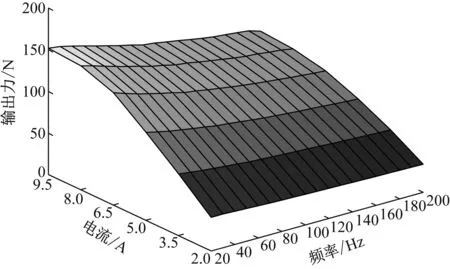
圖6 電磁作動器出力性能測試結(jié)果Fig.6 Test results of output performance of electromagnetic actuator
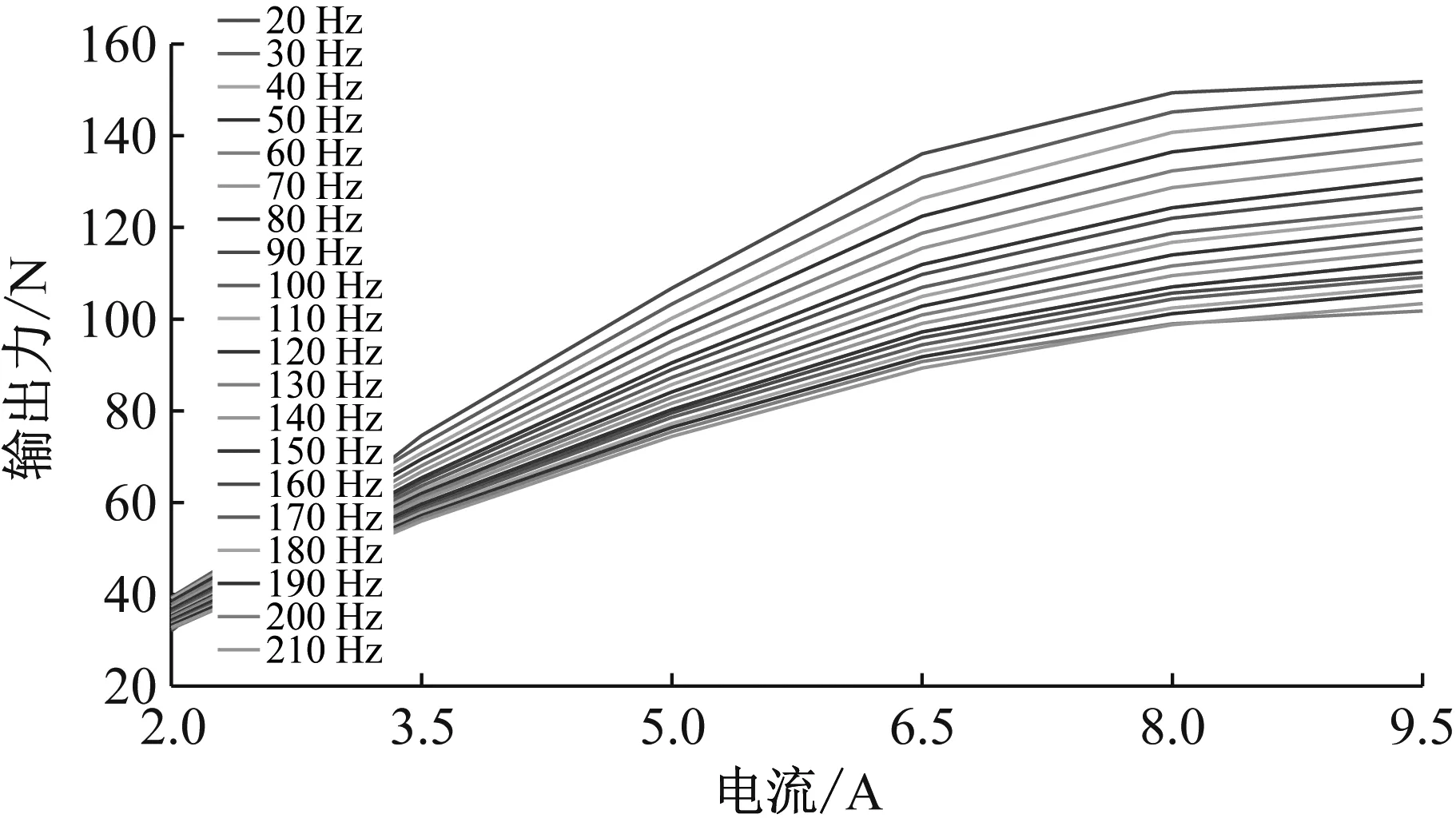
圖7 測試輸出力隨電流變化關(guān)系Fig.7 The relationship between Test output force and current
由圖7可知,在激勵電流6.5 A之前,測試輸出力與電流大小保持良好的線性關(guān)系,且與仿真結(jié)果吻合度較高。在6.5 A之后輸出力低于仿真計(jì)算結(jié)果,在8 A電磁力趨于平穩(wěn)。其原因在于隨電流增大,當(dāng)定子磁場強(qiáng)度達(dá)到一定時,永磁體的磁化強(qiáng)度達(dá)到飽和狀態(tài)。根據(jù)B-H磁化曲線可知,磁場強(qiáng)度H增大到一定程度,磁感應(yīng)強(qiáng)度B不再增加,說明了電磁力的輸出因磁飽和而收斂到定值。
2 自適應(yīng)抑制算法
在自適應(yīng)控制過程中,當(dāng)系統(tǒng)受到外界強(qiáng)烈干擾,誤差信號激增,引起控制權(quán)系數(shù)劇烈變化,使得輸出信號超出作動器有效工作范圍,最終導(dǎo)致系統(tǒng)發(fā)散失控。因此應(yīng)對控制器的輸出信號進(jìn)行約束,將幅值限定在作動器飽和區(qū)以內(nèi)。本文在FXLMS算法基礎(chǔ)上引入抑制因子,對控制器權(quán)系數(shù)的更新進(jìn)行調(diào)整。
FXLMS算法將最小均方算法與次級通道濾波結(jié)構(gòu)相結(jié)合對權(quán)矢量w(n)進(jìn)行更新,在主動控制領(lǐng)域被廣泛應(yīng)用。其算法原理圖如圖8所示。
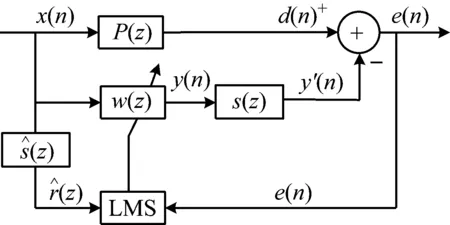
圖8 FXLMS算法框圖Fig.8 FXLMS algorithm block diagram
FXLMS算法的權(quán)系數(shù)迭代公式為
w(n+1)=w(n)+μ?(n)=

(4)

(5)
對控制器輸出信號進(jìn)行約束,可寫為
(6)
式中:τ為約束閾值,sign(wTx)為取符運(yùn)算,即當(dāng)超出閾值時進(jìn)行限幅,在范圍內(nèi)時按式(4)原始進(jìn)行更新。
在式(6)基礎(chǔ)上,為保證控制精度,引入拉格朗日函數(shù)求取條件極值,設(shè)定目標(biāo)函數(shù)為
(7)
對w、λ分別求導(dǎo)
(8)
令式(8)結(jié)果均為零,得到
(9)
(10)
(11)
將Δw作為抑制因子引入式(4)對權(quán)系數(shù)更新進(jìn)行修正,得到最終迭代公式

(12)
通過抑制因子的引入,當(dāng)控制器輸出在τ值以下時式(12)等同于式(4);當(dāng)控制器輸出在τ值以上時Δw迅速減小至零,使得權(quán)系數(shù)更新幅值減小,輸出穩(wěn)定在閾值附近,從而避免作動器進(jìn)入飽和區(qū)。
根據(jù)式(6)輸出形式,可取反正切函數(shù),如
(13)
得到其導(dǎo)函數(shù)為
(14)
式中:α為與閾值有關(guān)的系數(shù),β可調(diào)整導(dǎo)函數(shù)窗寬。圖9為反正切函數(shù)及導(dǎo)函數(shù)圖像。
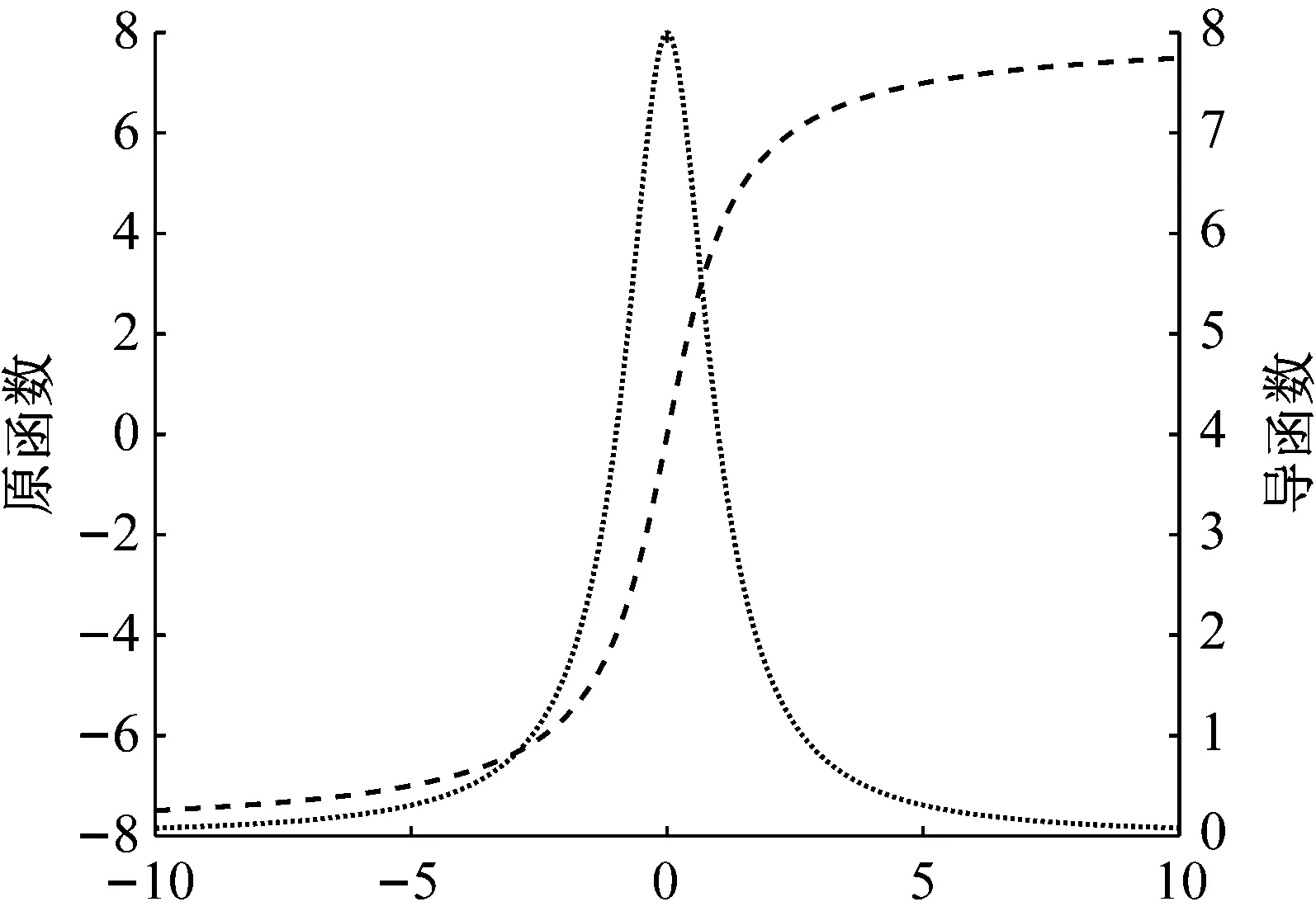
圖9 反正切函數(shù)及其導(dǎo)函數(shù)Fig.9 Arctangent function and its derivative function
3 仿真分析
對上述抑制算法進(jìn)行仿真驗(yàn)證,根據(jù)電磁作動器測試試驗(yàn),閾值τ設(shè)為8,表示作動器的最大輸入電流信號為8A。在實(shí)際控制中,為滿足式(6)要求,應(yīng)分段處理,即設(shè)置不同的β,得到分段函數(shù)如式(15)所示。
(15)
采用頻率為37 Hz和60 Hz幅值均為8的雙頻諧波信號疊加信噪比20 dB的高斯噪聲作為參考信號。控制濾波器長度均為300階。算法迭代步長為0.000 1。得到各算法誤差信號控制前后時間歷程及控制輸出信號結(jié)果如圖10~12所示。

圖10為未考慮作動器飽和時FXLMS算法結(jié)果,未引入抑制因子時,控制器輸出信號明顯超出閾值。圖11為考慮作動器飽和,對超出閾值部分直接限幅處理,從圖11(b)可以看出,對輸出信號進(jìn)行限幅相當(dāng)于削波處理,不利于系統(tǒng)控制穩(wěn)定性。在剛開始迭代時,輸出幅值在閾值以內(nèi),誤差信號得到了有效收斂,當(dāng)超過閾值時,由于削波使得算法失效,導(dǎo)致系統(tǒng)發(fā)散。圖12為考慮作動器飽和,自適應(yīng)抑制算法結(jié)果。由圖12(a)可知,誤差信號迅速實(shí)現(xiàn)收斂,表明了Δw的引入加快了收斂速度,且幅值降低了85%左右。由圖12(b)得到輸出信號較好約束在閾值以內(nèi),與圖11(b)相比,實(shí)現(xiàn)了平穩(wěn)輸出,表明式(12)對輸出信號的可靠調(diào)整。根據(jù)仿真結(jié)果,證明了抑制算法對輸出信號的有效約束和振動的顯著控制。
4 試驗(yàn)分析
進(jìn)一步驗(yàn)證算法可行性,采用NI PXI搭載RT系統(tǒng)進(jìn)行主動隔振試驗(yàn)。試驗(yàn)對象為電磁激振器及附加配重,用來模擬中小型機(jī)械設(shè)備。將本文設(shè)計(jì)的作動器與被動隔振裝置有效集成為主被動復(fù)合隔振器,在無輸出力時具有較好的被動隔振效果和承載能力。試驗(yàn)設(shè)備主要有NI PXI控制系統(tǒng),Copley Xenus伺服驅(qū)動器,PCB加速度傳感器,電磁激振器,WYK-20040K直流穩(wěn)壓穩(wěn)流電源等,試驗(yàn)臺架及原理示意圖如圖13所示。

(a) 試驗(yàn)臺架

(b) 試驗(yàn)原理示意圖
在試驗(yàn)前先對系統(tǒng)次級通道進(jìn)行離線辨識,利用20~200 Hz白噪聲激勵作動器,采用橫向FIR濾波器作為辨識模型,長度為200階。通過LMS算法不斷更新其權(quán)系數(shù)逼近次級通道真實(shí)傳遞函數(shù),幅值曲線趨于平穩(wěn)后辨識結(jié)束,得到次級通道矩陣并將其寫入下位機(jī)。
由信號發(fā)生器產(chǎn)生37 Hz、60 Hz雙頻幅值均為8 A諧波信號作為初始激勵信號。控制濾波器長度均為300階。算法迭代步長為0.000 03。采樣頻率設(shè)定為10 kHz,即滿足采樣定理,又保證對信號的實(shí)時跟蹤。針對AD板卡采集信號存在的50 Hz工頻干擾,在試驗(yàn)中設(shè)計(jì)巴特沃斯帶阻濾波器進(jìn)行濾除。以下層誤差信號傳感器采集的加速度響應(yīng)作為評價標(biāo)準(zhǔn),開啟主動控制前后信號的降幅即為隔振效果。在試驗(yàn)進(jìn)行2 s后,開啟算法控制。得到時頻域控制效果和輸入電流幅值如圖14、15所示。
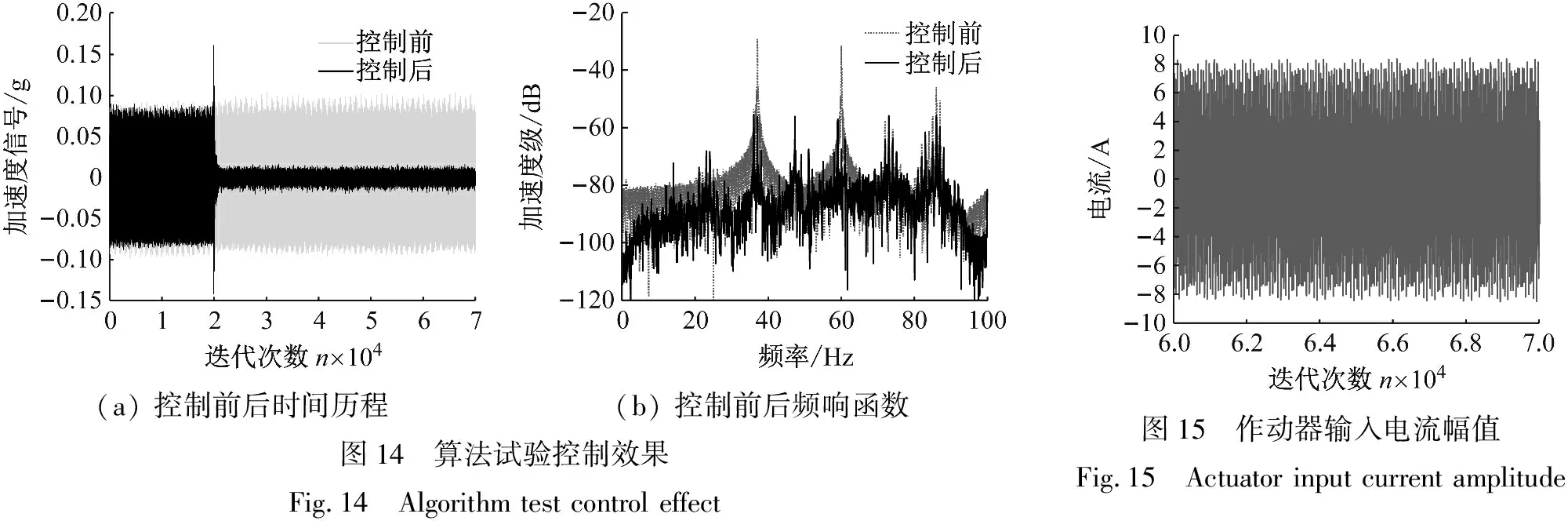
控制開啟后,在時域上誤差信號迅速得到收斂,且幅值降低了85%以上。在頻域上對37 Hz和60 Hz線譜分別衰減了27 dB和35 dB,控制效果較好。輸入電流也較好地約束在±8 A以內(nèi)。試驗(yàn)結(jié)果表明在較大干擾下,自適應(yīng)抑制算法能夠較好約束輸出信號,保證電磁作動器在正常激勵電流內(nèi)工作,實(shí)現(xiàn)了對振動的有效隔離。
進(jìn)一步驗(yàn)證算法魯棒性,在試驗(yàn)運(yùn)行到20 s時,對系統(tǒng)基座施加沖擊,誤差信號能夠迅速穩(wěn)定,在21~22 s之間連續(xù)施加沖擊,誤差信號仍能夠快速穩(wěn)定到收斂值。其加速度響應(yīng)時間歷程如圖16所示。通過對系統(tǒng)不斷施加沖擊,說明了抑制算法仍能有效控制輸出信號,在誤差信號急劇增大時,控制器權(quán)系數(shù)能夠迅速回穩(wěn)。因此得出算法具有較強(qiáng)的抗干擾能力。
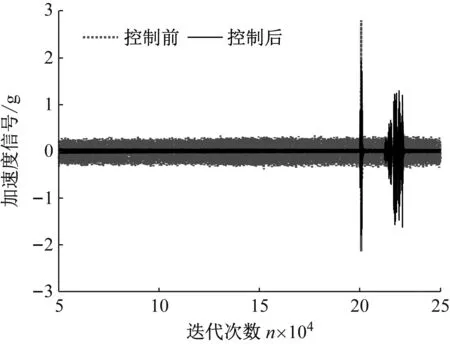
圖16 加沖擊后加速度響應(yīng)時間歷程Fig.16 Acceleration response time history after shock
5 結(jié) 論
(1) 針對船用機(jī)械設(shè)備低頻線譜振動,電磁式作動器具有結(jié)構(gòu)緊湊、輸出力大、承載能力大、線性度高等優(yōu)點(diǎn)。通過對電磁作動器特性分析得出隨電流激勵增大,作動器會由于磁飽和而進(jìn)入飽和區(qū)。當(dāng)系統(tǒng)受到強(qiáng)烈干擾或沖擊,容易導(dǎo)致控制器輸出信號超出作動器工作電流范圍,使得控制發(fā)散。
(2) 為保證系統(tǒng)受到強(qiáng)烈沖擊不失效,通過引入了抑制因子對控制權(quán)系數(shù)更新進(jìn)行修正,在閾值范圍內(nèi)按原始信號輸出,當(dāng)超出閾值時,權(quán)系數(shù)不再更新,輸出信號限幅。仿真和試驗(yàn)結(jié)果表明,該算法較好解決了作動器飽和影響,對雙頻激勵取得了顯著的控制效果,在受到?jīng)_擊時展現(xiàn)了良好的控制魯棒性。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
