基于MPC的直驅式動力變速器離合器分級控制策略*
2022-01-27 11:03:48王伊民胡建飛胡建華
機電工程 2022年1期
關鍵詞:模型
王伊民,胡建飛,張 偉*,胡建華,陳 程
(1.中國計量大學 機電工程學院,浙江 杭州 310018;2.杭州前進齒輪箱集團股份有限公司,浙江 杭州 311203)
0 引 言
直驅式動力變速箱被應用于我國的工程機械領域,智能控制技術也在工程機械上得到了廣泛的應用。用戶對變速箱的性能要求越來越高,主要體現在技術的先進性、操作的流暢性以及作業的安全性上。
傳統工程機械使用的動力變速箱需要腳踩離合器控制換擋,對駕駛員的要求高,且其勞動強度大,對離合器損傷大。而直驅式動力變速箱使用變速箱中的離合器進行換擋,將駕駛意圖輸入控制就能完成起步換擋,動力傳輸值可以達到97%;通過對油壓進行精準控制,可使車輛換擋平順,并提高離合器的使用壽命。
隨著時間的推移,對于變速箱的控制已經從基于PID的驅動,演變為基于模型的多目標優化控制,解決了啟動控制、離合器控制和換擋控制等復雜問題。
在車輛換擋過程中,發動機通過離合器摩擦片滑摩控制實現動力傳動。在動力切換中,離合器會產生較大的滑摩功,而換擋完成后由于接合離合器與脫離離合器之間不同的轉速比會產生較大的換擋沖擊。
通常,評價離合器接合特性有兩個主要指標,即滑摩功和沖擊度。對油壓進行控制,可影響離合器接合柔順度。油壓曲線較陡,離合器接合快,但齒輪間會產生較大的沖擊;油壓曲線較平緩,則會拉長換擋時間,離合器接合緩慢雖使沖擊減少,但摩擦片間滑摩功增大,損傷摩擦片。
近年來,眾多專家學者已針對以上問題做了一些研究。LARRY等人提出了在慣性相中控制變矩器渦輪轉速,與實際的轉速形成誤差,得到補償量進而修正離合器的控制壓力,改善了AT的換擋品質。ROBERT M[1]提出了包括前饋和反饋的閉環控制策略,提高了起步離合器壓力控制的精確性,實現了對離合器的精確控制。GAO B Z等人[2]提出了一種基于MPC方法控制車輛啟步中離合器的接合,優化了離合器的滑摩和傳遞的扭矩。PARK J等人[3]提出了一種基于離合器模型中扭矩自適應跟蹤控制的方法,優化了離合器的滑摩接合控制。LI X Z等人[4-6]研究了基于離合器接合指標邏輯切換的控制方法,分析了脫開狀態下多片離合器的摩擦副間隙,及不同溫度下冷卻油性質等因素對換擋同步時間和滑摩功的影響,提高了離合器的接合質量。雷雨龍等人[7,8]提出了一種閉鎖離合器起步滑摩分段控制策略。XIN Li等人[9]提出了一種使用時域約束的MPC方法,控制離合器的接合過程,有效縮短了扭矩中斷,減少了換擋沖擊。
但在離合器的接合過程,很少有人結合閥的控制對其進行研究。由于直驅式動力變速箱無主離合器,它的換擋、換向的性能完全靠離合器接合的狀態決定。離合器接合動作由比例閥輸出壓力變化實現,壓力變化對于離合器接合質量好壞至關重要,而比例閥輸出壓力變化由比例閥的輸入電流實現,所以需要精準控制比例閥的電流。
在基于前人研究的MPC算法基礎上,筆者提出一種基于MPC的離合器接合分級控制方法。
1 動力學模型建立
筆者研究的對象是一款搭載直驅式動力變速箱的單鋼輪壓路機。該壓路機的動力傳遞簡化圖如圖1所示。

圖1 壓路機動力傳遞簡化圖
該壓路機動力傳動系統由發動機、變速箱和車輪組成。油門開門控制發動機運行,發動機通過變速箱傳遞扭矩,通過變速箱實現轉速、扭矩的轉換,作用于車輪使之產生向上的切向力。
1.1 發動機模型
發動機模型為具有轉動慣量的旋轉剛體。根據發動機實際動態參數,筆者采用最小二乘法擬合發動機特性曲線[10],將其轉換成插值表,獲取各個油門開度下的發動機扭矩。發動機插值模型如圖2所示。

圖2 發動機插值模型圖
筆者建立發動機動態輸出扭矩特性。出于合理化考慮,筆者將動態特性曲線簡化為一階慣性模型,其動態輸出如下:
(1)
式中:Mec—發動機動態輸出扭矩;M0—發動機扭矩變化初值;Me—發動機輸出扭矩;te1—滯后時間常數;te2—動態響應時間常數;α—油門開度。
1.2 變速箱傳動模型
變速箱模塊根據發動機傳遞的扭矩和輸入轉速,得到輸出軸的扭矩和變速箱慣性阻力矩,其數學模型為:
Mtin=ig·i0·Mtout+Mtine+Mtlo
(2)
Mtout=ig(η·Mtin-Mtine)
(3)
(4)
ωtout=ωtin/ig
(5)

在變速箱中,功率的損失只體現在扭矩的損失上,其對轉速沒有影響。
1.3 離合器模型
變速箱中的離合器采用濕式離合器,其摩擦副間存在一層油膜,油膜減小了摩擦片的機械磨損,并且能帶走摩擦副摩擦產生的熱量,保證接合過程中的摩擦系數穩定。在其運行接合中,接合平穩沖擊小,但需要較大的軸向壓緊力。
摩擦副結構簡圖如圖3所示。
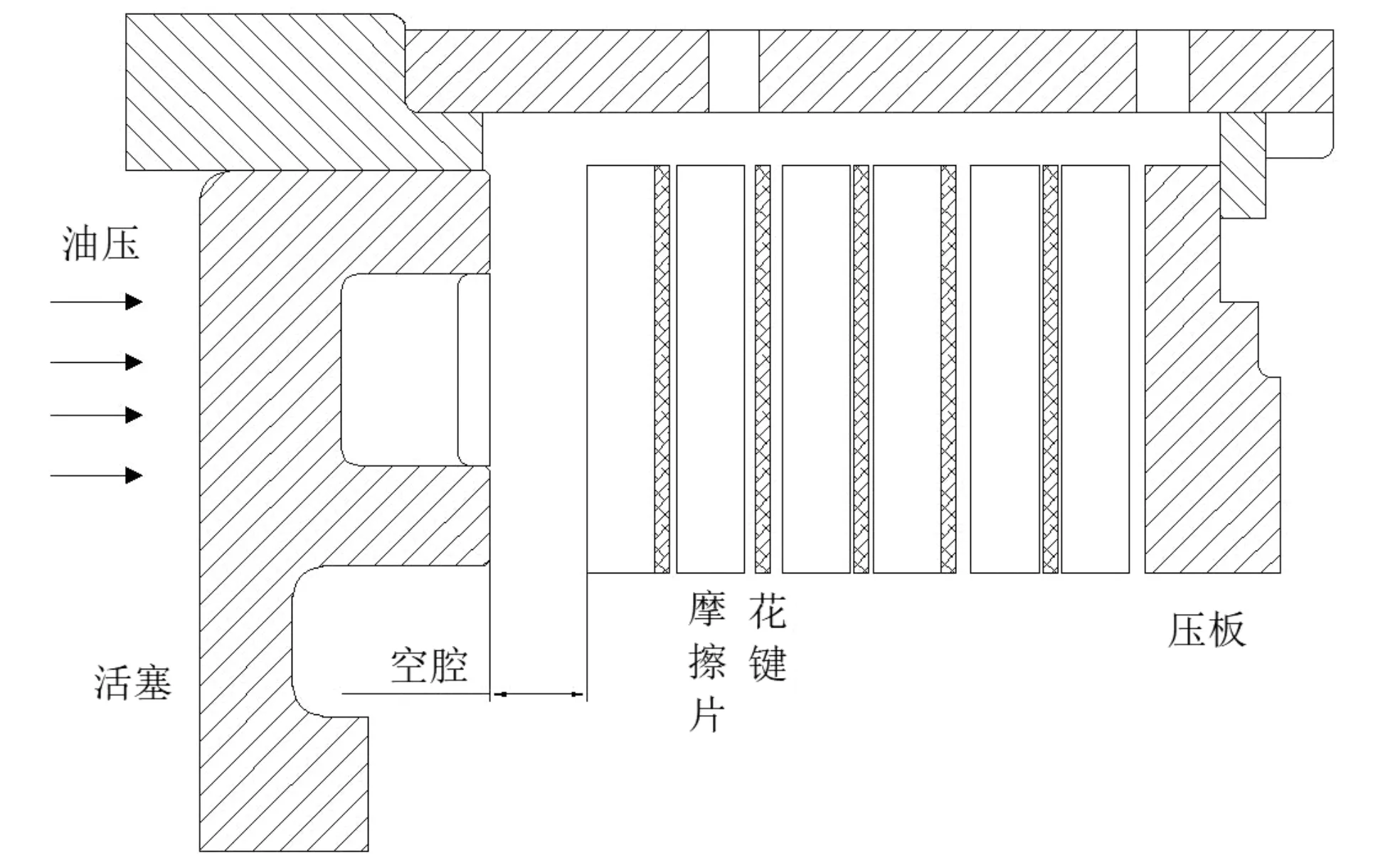
圖3 摩擦副結構簡圖
在離合器接合過程中,比例閥門打開,控制油壓給活塞施加一個推力,推動離合器摩擦片接合。該離合器模型在接合時分為4個階段,即擠壓階段、壓緊階段、滑動摩擦階段和完全接合階段。
在擠壓階段前有一段空腔期需要活塞快速移動。當活塞與摩擦片接觸時,則進入擠壓階段,濕式離合器開始接合,油壓作用在離合器壓盤上;摩擦副間的潤滑油受到擠壓,形成油膜承載力,對主從動摩擦片的相對運動產生一定的阻礙作用;
在壓緊階段中,潤滑油填充滿于微凸體與微凸體間的間隙內,濕式離合器摩擦副表面微凸體開始接觸,直至摩擦副間隙內的潤滑油基本被擠出;
滑動摩擦階段,摩擦副間的潤滑油量極少,傳遞來的接合壓力幾乎由微凸體接觸力承擔。此時,主從動摩擦片存在著相對運動,主從動盤轉速差Δω大于摩擦臨界速差Δωtol,實際傳遞扭矩為Mcl;
在完全接合階段,濕式離合器主從動盤轉速相同,濕式離合器摩擦副間不存在相對運動。
離合器摩擦片的滑摩扭矩模型為:
Mcl=FcAmRnμdsign(Δω)
(6)
(7)
式中:Fc—作用于離合器摩擦片上的油壓;Am—摩擦片面積;R—離合器等效半徑;n—摩擦片面數;μd—離合器動摩擦系數;ρ—油密度;d0,d1—活塞內外徑。
離合器完全接合時的扭矩模型為:
Mh=FcAmRnμssign(Mtr)
(8)
式中:Mh—離合器在靜摩擦下的扭矩容量;μs—離合器靜摩擦系數。
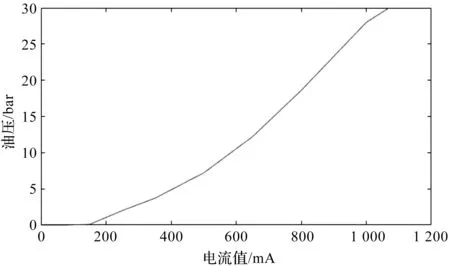
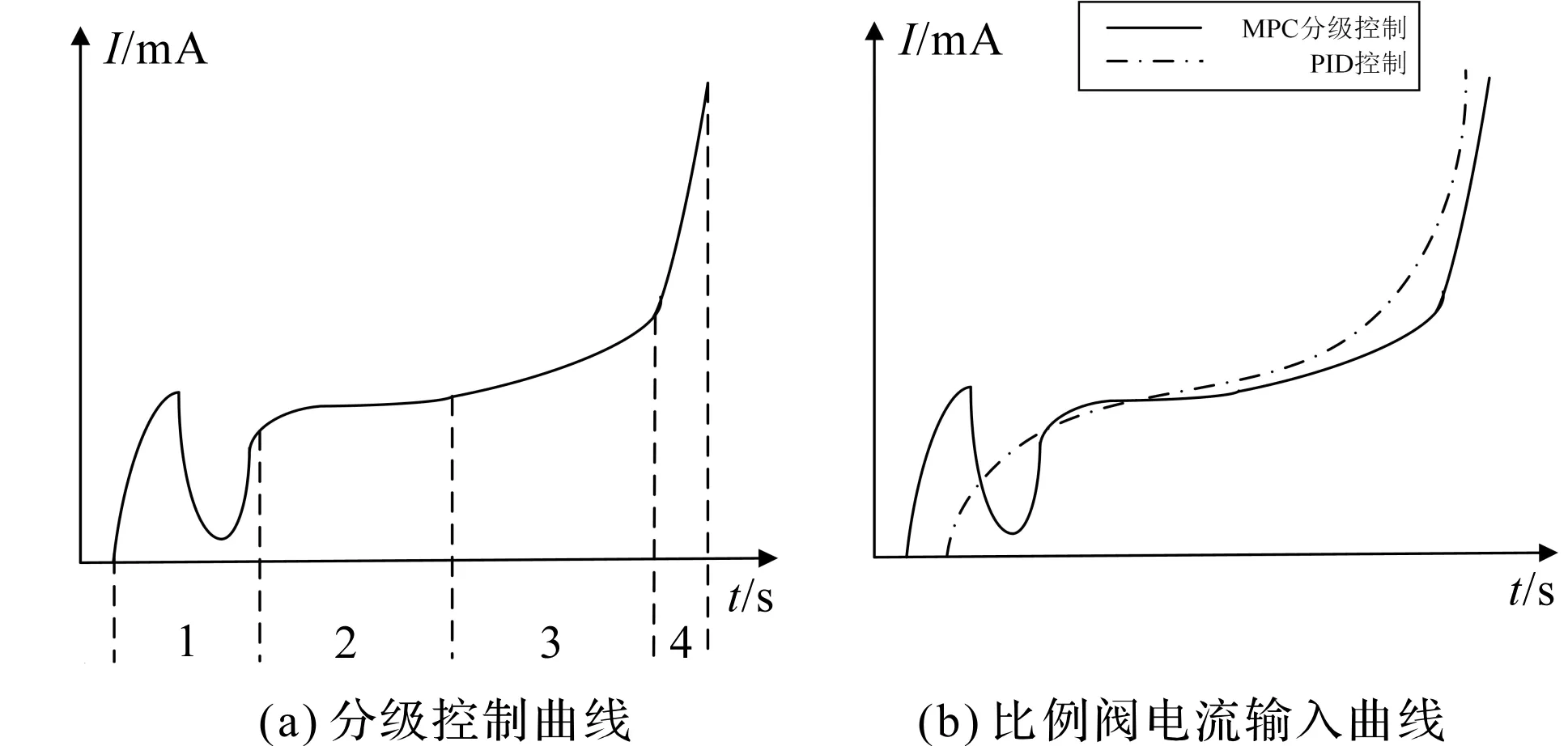
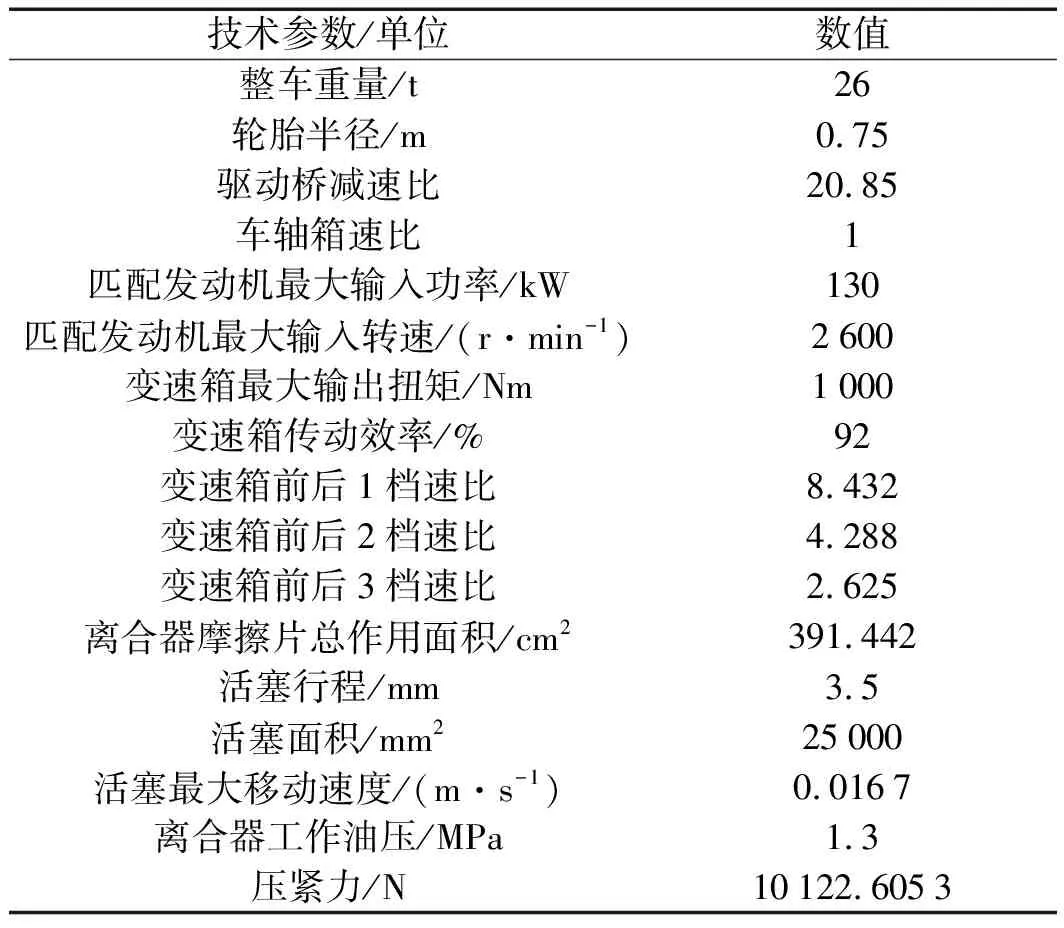
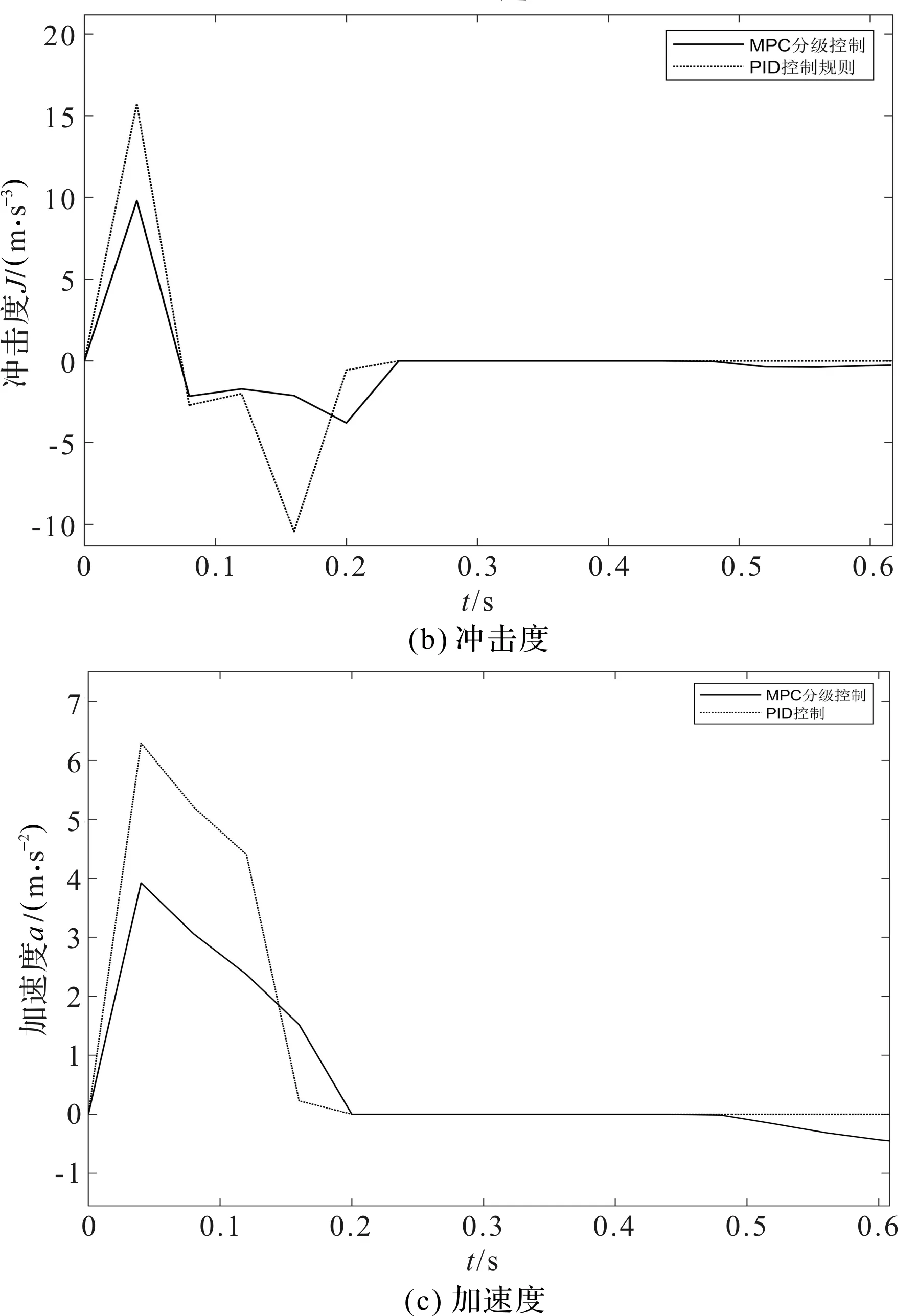
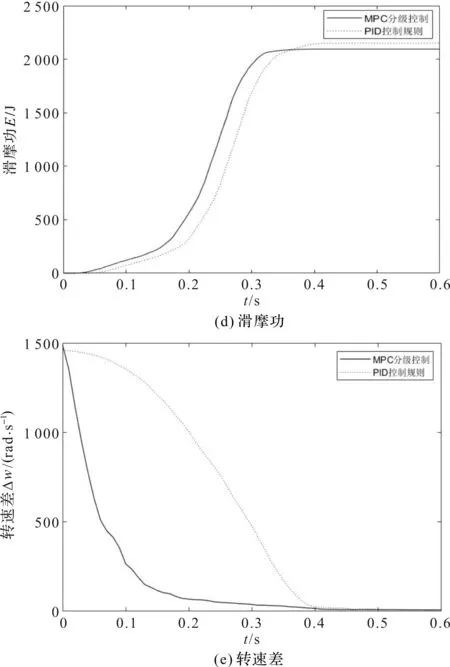
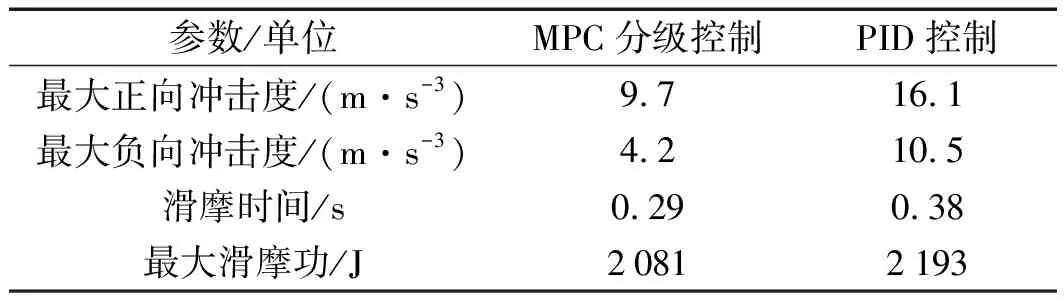
當|Δω|≤Δωtol,且|Mtp| 為了得到離合器接合后的轉速,忽略動力傳動過程中較弱的影響因素,簡化傳動過程,筆者提出下列設想:發動機與變速箱間剛性連接;齒輪間完全嚙合;傳動各個部件無扭曲變形;輪胎與地面接觸良好。 離合器接合時從動盤轉速ωtc模型為: (9) 式中:Mv—變速箱輸出的阻力矩;Iv—變速箱輸出端的有效轉動慣量。 壓路機在道路上行駛時,需克服來自地面的滾動阻力Ff、坡道上的坡度阻力Fi、空氣中的阻力Fw、加速阻力Fj、作業時的壓輪阻力FH。其行駛時總阻力模型為: ∑F=Ff+Fi+Fw+Fj+FH (10) Ff=Gafcosα (11) Fi=Gasinα (12) (13) (14) (15) 式中:Ga—作用于壓路機上的重力;f—滾動系數,對于輪式壓路機取f=0.000 36+0.086v;α—坡角度;CD—空氣阻力系數;Aa—汽車迎風面積;v—車速;Iw—車輪轉動慣量;Rw—輪胎的滾動半徑;If—發動機剛性連接的轉動慣量;B—壓輪寬度;μ—壓輪對地面的摩擦系數;Gb—各壓輪質量。 MPC控制器非常依賴于數學優化,筆者在設計中合并了狀態變量的約束和邊界。其算法邏輯如圖4所示。 圖4 MPC算法邏輯圖 筆者對預測輸入進行優化,在預測時域內計算出最優的系統輸入軌跡來跟蹤輸出參考;將下一時刻計算的控制輸入應用于系統(其余丟棄);利用反饋校正補償由于模型失配或其他干擾引起的相對于理想狀態的偏離值。 筆者先建立車輛換擋離合器接合模型,再使用優化引擎計算有限時間范圍內的離合器從動盤扭矩,計算出相應比例閥的控制量矩陣,執行第一組的控制輸入[11-14]。 由式(6,9)可以得出離合器在滑摩過程中的表達式為: (16) 將其進行離散化處理,可以得到: (17) 根據式(17),將該模型寫成增量式方程,即: Δx(k+1)=AΔx(k)+BuΔu(k)+BdΔd(k) (18) 其中:Δx(k+1)=x(k+1)-x(k);Δu(k+1)=u(k+1)-u(k),Δd(k)=d(k)-d(k-1)。 則輸出的增量方程為: y(k)=CΔx(k)+y(k-1) (19) 以最新的測量值為初始條件,預測步長為p,控制步長為m,并假設外部擾動Mv對于離合器接合時扭矩的影響很小,可得: Δu(k+i)=0,i=m,m+1,…,p-1 (20) Δd(k+i)=0,i=1,2,…,p-1 (21) 假設建立一個k時刻的模型,x(k)會受到當前狀態k時刻及之前的影響,這些時刻的影響會累積下來,根據設定的控制步長在每一個時刻得到一個預測輸出進行刷新,在每個時刻得到新的預測輸出值。狀態預測模型為: (22) (23) 在目標函數的建立中,筆者設置針對狀態量代價Q矩陣和控制量的代價矩陣R的權重,以實現對控制量、狀態量的控制,使系統的功能靠近理想目標。 通過對目標函數進行求導,可得出對于控制量輸入的最優解(期望軌跡): o(k+i)=αiy(k)+(1-αi)yr (24) 式中:α—期望軌跡的權重因子,α值越小,響應越迅速,0<α<1;yr—目標值。 建立目標函數為: (25) … J=‖Y(k+1)-O(k+1)‖2Q+ (26) 其中:Q權重大小與控制量有關,R權重大小與使用多少能量達到目標值有關。 要使得目標函數最小,其必要條件為: (27) 通過求導,可得到最優解,即: (28) 將最優解作為控制增量,可以得到下一時刻的離合器轉矩Mcl,根據Mcl即可以控制比例閥的輸入電流。 (29) 而補償函數則為: (30) 式中:H—補償誤差的權重值;e—誤差值,只取求得誤差矩陣中的第一位。 將求得的補償函數Ycor代入式(22),可以得到新的加入補償過后的預測函數。 該直驅式動力變速中,離合器接合的動作通過控制器輸出相應的PWM電流信號控制比例閥進油的開度,控制輸出油壓。壓力油推動活塞往摩擦片方面移動;活塞移動經過離合器空腔期接觸到摩擦片,離合器主從動盤相對運動;比例閥接收到的電流信號加大,活塞持續受到壓力油作用,最終使離合器摩擦片完全接合,主從動盤無相對運動。在不同壓力油作用下,摩擦片傳遞的扭矩也不同。 壓路機的直驅式動力變速箱換擋離合器接合過程中,使用的比例閥由電流信號所控制[15]。 比例閥供油曲線如圖5所示。 圖5 比例閥供壓曲線 圖5中,油壓力與輸入電流值近似線性關系[16]。由于比例閥特性,存在一段死區電流,并不會產生供油壓力。 由于電流信號的輸入控制對離合器接合影響較大,為了使車輛起步換擋過程柔順,筆者提出了MPC分級控制曲線的規則。 MPC分級控制曲線如圖6所示。 圖6 比例閥控制電流曲線 圖6中:在第一個階段中,活塞會經過一段空行程,離合器處于完全分離狀態,無扭矩傳遞,輸入大電流,快速充油,使活塞加快移動,減少處于空腔期的時間(即響應速度加快);在快速充油后,需要減少輸入的電流值,避免克服空腔和彈簧阻力后油壓突然上升,超過起摩點的壓力,導致換擋過程中齒輪間的急劇沖撞;這一過程到活塞開始壓縮膜片彈簧為止,一般瞬時完成。這一階段的控制以快速消除間隙為目標; 在第二階段,油壓不斷升高,此時電流和油壓傳遞成線性關系,摩擦片逐漸壓緊,此時要針對需要的不同扭矩,進行滾動優化以求得最優解,找到合適的起摩點;同時主從動片開始滑摩并產生滑摩功,離合器傳遞的扭矩緩緩地增加。如果在起步過程中,由于驅動力矩小于阻力矩,車輛仍處于靜止狀態,車輛沖擊度為零;如果在換擋過程中,阻力大于驅動力,其變化率即為沖擊度,沖擊度取決于離合器結合速度。該階段,緩沖接合的目的是防止出現過高的瞬時加速度,導致換擋沖擊大; 在第三階段,驅動力大于車輛阻尼,增大電流值開始升壓,加速度由負值變為正值,車輛速度開始增加,同時車輛阻力開始增加,車輛加速度平穩上升,轉速差逐漸減小。此階段實現平穩的傳扭過程,避免出現傳遞扭矩突變的情況; 在第四階段,由于主、從動盤轉速一致,需要離合器快速接合,避免滑摩過多導致的損耗。該過程升壓很快,是一個動態過程,最后往往出現壓力超調,該階段是品質控制的另一個重點。 采用上述控制策略,一方面可使起步換擋過程或者加速過程中,離合器柔順接合、減小沖擊;另一方面可減小離合器損耗,提高其壽命[17]。 在比例閥控制離合器的接合中,對于某一個擋位控制的比例閥采取分級的電流控制。首先,使預充油快速升壓,減少空腔期,使活塞快速移動;之后,通過MPC算法對需要的扭矩進行滾動優化,求得傳遞扭矩接合點壓力,與預充油壓力相加,得到實際期望充油壓力。 對電磁閥輸入與實際期望充油壓力相對應的電流值,達到離合器平穩接合。對比例閥輸入的電流分級控制,不同電流控制同時作用,能減少能量損耗,使沖擊在離合器接合中得到緩沖。而傳統的PID控制比例閥的電流值,對非線性系統的控制很難達到理想效果,前期建壓太快、沖突大,不能有效找到起摩點,使得換擋中主從動盤滑摩功偏大,且換擋沖擊大,易損壞離合器摩擦片。 為了驗證MPC對離合器接合分級控制的效果,筆者對直驅式動力變速箱離合器接合進行仿真,即基于MATLAB/Simulink中創建的壓路機的動力學模型,針對直驅式動力變速箱在2檔升3檔的工況進行仿真;以油門開度作為輸入變量,并將MPC控制器嵌入該仿真模型進行分析。 其中,整車數據、直驅式動力變速箱DB132F機型數據、離合器參數等由杭州前進齒輪箱集團股份有限公司提供,如表1所示。 表1 技術參數車數據表 在仿真過程中,MPC控制器的采樣步長為0.01 s,Q權重設為2,R權重設為10,α權重設為0.2,補償誤差H權重設為0.5。 為了進一步驗證基于分級控制的離合器接合效果,筆者采用整機廠的離合器接合換擋PID控制規則作對比分析。 MPC分級控制和PID控制升檔的仿真結果,如圖7所示。 圖7 仿真結果圖 由于壓路機的工作特性,該車型作業時車速一般為2 km/h~9.8 km/h。在圖7中,以m/s的單位顯示。對于變速箱在相同的工作條件下升檔。 從圖7(a)可以看出:在MPC分級控制下,車速提升更加迅速且平穩; 從圖7(b,c)可以看出:在MPC分級控制下,最大沖擊度為9.7 m/s3,并且受到的沖擊震蕩平緩,瞬時加速度不大,受到的負向沖擊也較小;而在PID控制下,瞬時沖擊相對更大,離合器主動盤轉速差大,難以迅速調整控制量以降低轉速差; 從圖7(d)可知:在MPC分級控制下的滑摩功比PID控制規則下稍低,滑摩時間減少; 從圖7(e)可以看出:離合器真實相對轉速與對比轉速之間存在著較大誤差;在MPC分級控制下,能保持良好的換擋性能使轉速差在0.2 s內下降至50 rad/s之下,離合器接合時間減少,轉速波動更小,加快換擋進程;而在PID控制下,主從動盤轉速差下降緩慢,系統接合時間較長。 仿真結果對比如表2所示。 表2 仿真結果對比 根據表2結果可知:在油門開度相同控制下,兩種控制器對于離合器換擋接合都有一定程度的作用;而在MPC分級控制下,離合器接合速度響應更快,加速度的波動范圍小,極大地減少了沖擊幅度。 基于模型預測控制基礎,筆者對直驅式動力變速箱采用了離合器接合分級控制策略。首先,對變速箱中離合器進行了動力學分析,并在臺架試驗上測試了其性能指標,建立了整車模型;設計并運用了MPC控制規則,建立了空間狀態方程和預測方程,求出了最優解以實現對離合器接合油壓的控制;最后通過仿真模型測試,驗證了該方法在換擋中的效果。 研究結果表明: (1)與傳統的PID控制相比,采用該方法的離合器接合速度更快,沖擊度降低了一半,滑摩時間減少了8%; (2)在其他機型上使用該方法,根據自身的機型數據求得起摩點,可以改善離合器的接合情況,適應更多工況,提高換擋的響應度。 在后續的研究中,筆者將對傳動鏈上的方向離合器和換擋離合器進行結合控制,以對進一步換擋中離合器結合的柔順性進行優化。1.4 壓路機整車動力學模型
2 基于MPC控制器設計
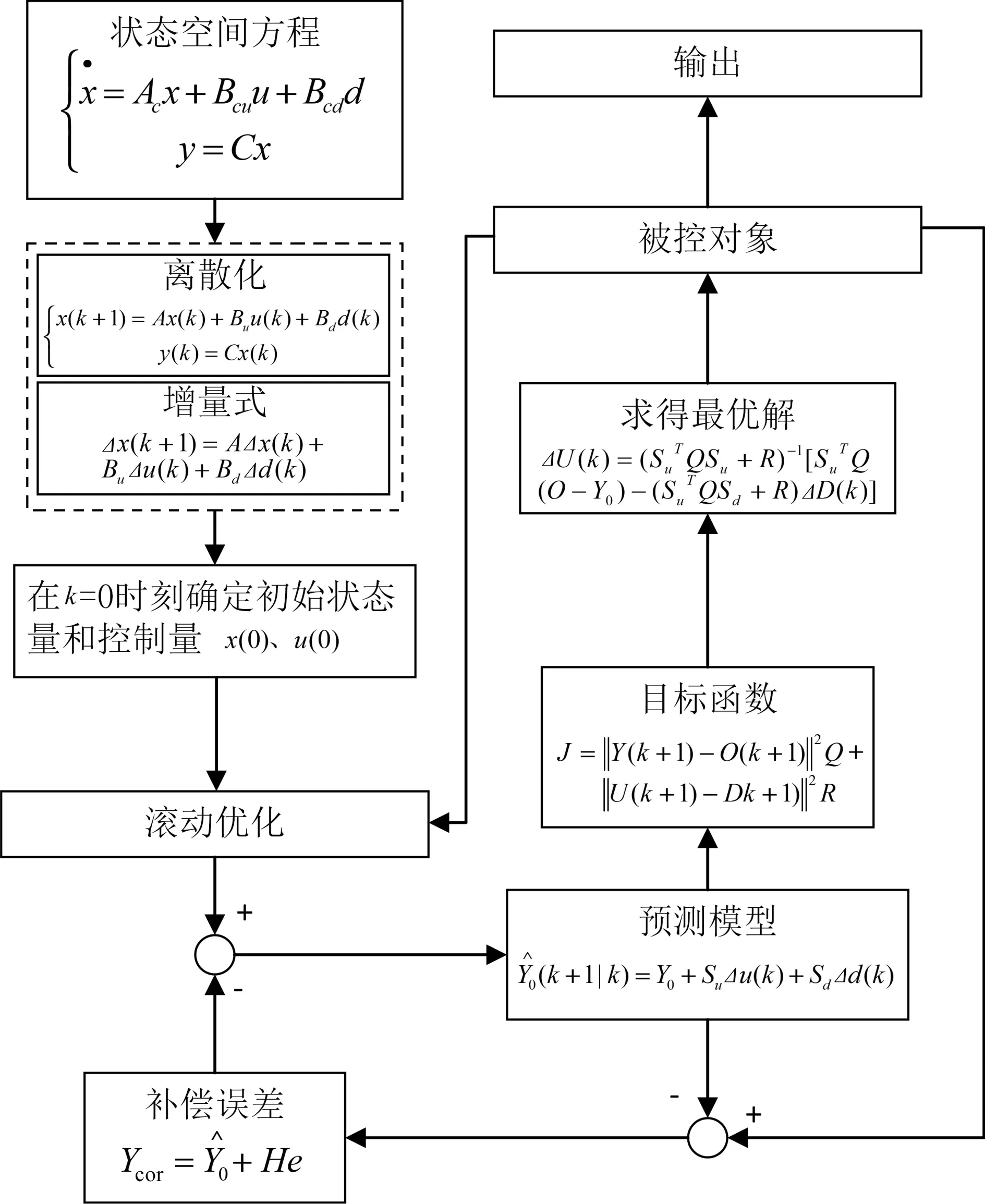
2.1 狀態模型建立

2.2 狀態預測模型建立
2.3 滾動優化
‖U(k+1)-Dk+1)‖2R
2.4 誤差補償


3 分級控制離合器接合
3.1 比例閥的控制
3.2 分級控制
4 仿真分析

5 結束語
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19