帶陀螺阻尼器的起重機吊重防擺控制裝置研究*
2022-01-27 11:04:10焦宏濤吳立仁
機電工程 2022年1期
焦宏濤,吳立仁,董 芳
(1.鄭州鐵路職業技術學院 機電工程系,河南 鄭州 451460;2.河南理工大學 機械與動力工程學院,河南 焦作 454002)
0 引 言
目前,起重機已在建筑、配送和制造等各種領域得到廣泛的應用。
懸掛在起重機吊鉤上的材料或產品稱為懸掛載荷或者吊重[1,2]。懸掛載荷通過起重機操作員的操作而上下左右移動。但吊鉤是自由旋轉機構,缺乏旋轉動力裝置,這意味著受強風力的影響,吊鉤下的懸掛載荷會發生旋轉[3-5],這對起重機高空作業來說是極其危險的。當懸掛載荷受風力等干擾而向非預期的方向旋轉時,由于巨大的慣性,僅靠速度控制擺動是不足以將其停止在目標位置的。
目前,為了控制起重機吊鉤的懸荷(吊載)擺動,研究人員已經進行了大量研究。SUKSABAI N等人[6]提出了一種聚焦外力的前饋控制方法,該方法僅需測量橋式起重機的固有頻率,即可控制起重機吊鉤的懸荷擺動,且其幅值較小,不易被察覺。此外,潘凌云等人[7]采用輸入整形方法,對起重機系統吊重的防回轉進行了控制。王華榮等人[8]采用粒子群優化的模糊PID控制器,對橋式起重機的吊重進行了防擺控制,有效縮減了懸掛載荷擺角的消除時間。
然而,上述方法都是利用吊擺系統模型,在控制算法方面對其進行優化,沒有涉及起重機懸掛載荷機械結構方面的改進。此外,現有方法均沒有考慮風力等擾動,因此,當存在風力干擾時,懸浮載荷的擺動抑制性能會顯著降低,無法實現起重機懸掛載荷高精度的靜止定位。
另一方面,各種關于機械陀螺的研究結果表明,陀螺阻尼器在穩定控制方面具有較好的有效性。例如,ZHAO Zhan-zhan等人[9]使用陀螺儀來控制航天器姿態,并對各種控制方法進行了研究。LEMUS D等人[10]基于控制力矩陀螺儀,提出了一種可穿戴平衡輔助裝置。
這些研究大多是基于機械陀螺特性的主動控制。在這種主動控制方式中,機械陀螺的萬向節機構需要一臺大容量的飛輪擺動電機,這會導致裝置的整體重量和尺寸都大幅增加。
為了解決上述問題,筆者設計一種新型的起重機懸掛載荷的防擺控制裝置。首先,筆者對單軸機械陀螺垂直軸周圍,由短期擾動產生的大扭矩被動控制特性進行研究,然后通過伺服電機將懸掛載荷旋轉到任何位置,并利用上述被動控制來抑制懸掛載荷旋轉時產生的反作用力矩;為了縮短由于陀螺儀效應導致的飛輪傾斜角的偏移時間,采用陀螺阻尼器對垂直軸懸掛載荷的抗旋轉進行控制,以提高該裝置的性能,縮減飛輪傾斜角的偏移時間。
1 懸掛載荷防擺控制裝置設計
筆者所提出的懸掛載荷防擺控制裝置的設計原理,如圖1所示。

圖1 防擺控制裝置的設計原理
圖1中,該防擺控制裝置適用于帶滑輪的起重機,可通過連接部件直接連接到頂部的起重機吊鉤上。起重機吊鉤一般具有可旋轉的結構,包括一個繞垂直軸的軸承。此外,懸掛載荷附著在該裝置的吊鉤上。
該裝置的基本原理是通過伺服電機將懸掛載荷旋轉到任何位置,并由機械陀螺儀被動控制產生回轉力矩,來抑制在加速、減速時掛載荷旋施加給裝置本身的反作用力矩。
陀螺阻尼器的原理如圖2所示。
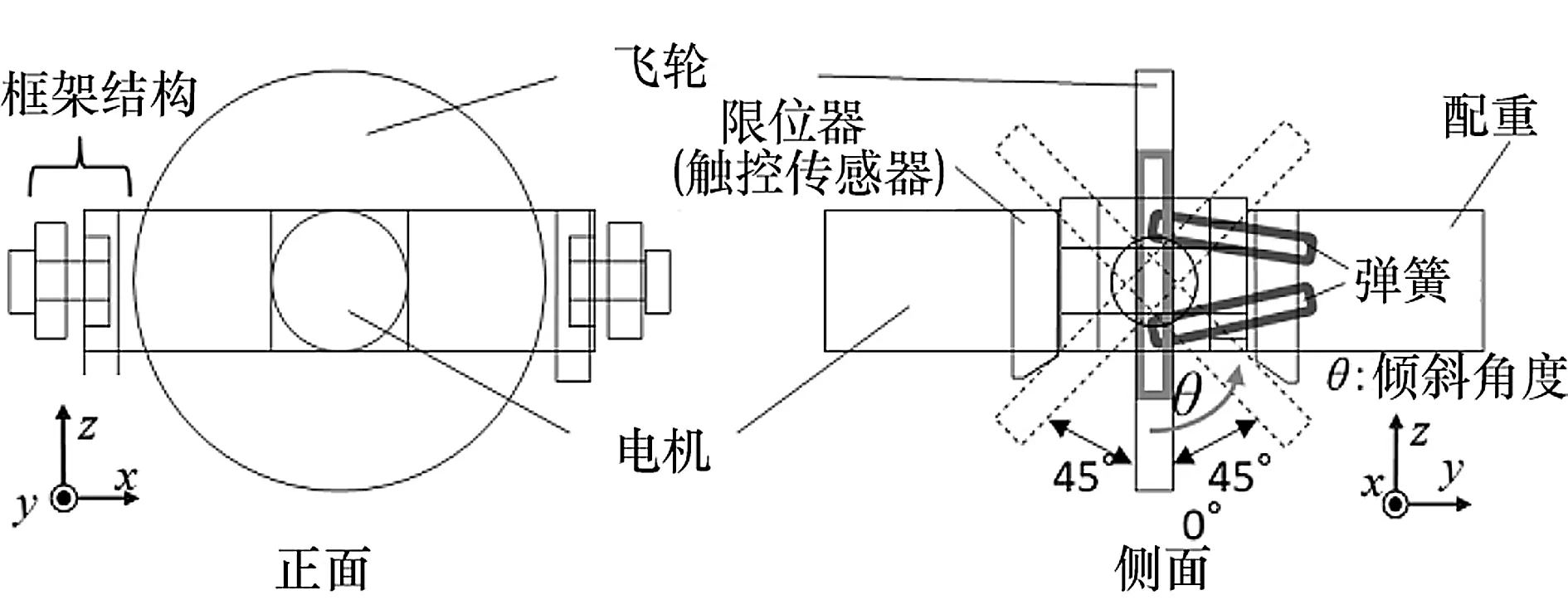
圖2 陀螺阻尼器的原理
圖2中,一個能夠高速旋轉的電機連接到飛輪的中心,筆者在飛輪的相對側設置一個配重,以便將重心放在機械陀螺儀[11]的中心;飛輪的兩側有一個萬向節結構[12,13],兩端由軸承支撐,允許在x軸旋轉方向自由旋轉;飛輪有一個連接在萬向節上的限位器,這樣它可以在45°范圍內繞x軸旋轉。
這種萬向節結構可以防止飛輪的傾斜超過上述范圍,減小陀螺效應。但因為飛輪的可動范圍有限,所以飛輪傾斜角恢復到原來的0°需要一定時間。
從圖1、圖2可以看出:當懸掛載荷旋轉或停止時,幾秒鐘的反作用力矩作用于裝置本身。此時,由于機械陀螺的特點,飛輪會因短時間輸入的瞬時角速度而傾斜大約±10°。在陀螺效應的作用下,飛輪試圖返回到初始位置時產生的陀螺力矩可以抑制懸掛載荷旋轉反作用力矩。這意味著飛輪傾斜角需要幾十秒鐘才能完全回到原來的位置。
因此,筆者設計了一種機構,即通過將彈簧連接到萬向架結構的兩側,來縮短飛輪的偏移時間。此時需要注意的是,如果彈簧剛度過大,飛輪傾斜時產生的角速度會降低;相反,如果彈簧剛度過小,則其效果將與沒有彈簧的情況相同。因此,有必要選擇一種合適的彈簧,來有效縮短偏移的時間。
此外,當風力等連續擾動施加到機械陀螺儀時,飛輪傾斜進一步增加±45°,陀螺效應大大降低。此時,飛輪需要幾分鐘才能偏移。考慮到上述問題,筆者從兩個方面對該裝置進行改進,以便在短時間內補償飛輪傾斜角。
風力控制的流程如圖3所示。

圖3 風力控制的流程
在圖1和圖3中,該控制裝置的內部都安裝有一個陀螺儀傳感器,可以測量繞垂直軸的角速度。
從圖2和圖3可以看出:當機械陀螺儀傾斜±45°時,觸控傳感器會作出響應,并以此作為觸發器來激活控制;當繞垂直軸的角速度達到0°/s時,風機停止運轉。
需要注意的是,如果只使用風機,懸掛載荷會因慣性而移動,導致其在0°/s附近反復振蕩運行。
在本研究中,風機和陀螺阻尼器結合在一起進行控制,因此風機在達到0°/s后會停止,而隨后懸掛載荷會因陀螺阻尼器的陀螺力矩而停止。
2 裝置建模
懸掛載荷防擺控制裝置的物理分析模型如圖4所示。

圖4 懸掛載荷防擺控制裝置的物理分析模型2a—裝置吊鉤的寬度;2b—懸掛在懸掛載荷上的寬度;H—裝置吊鉤與懸掛載荷之間的垂直距離
由圖4可見,該裝置使用兩個起重工具分配和懸掛載荷。
轉速目標值輸入信號如圖5所示。

圖5 轉速目標值輸入信號
當按下輸入旋轉操作按鈕時,角速度在t0(從0~t0)的加速時間內達到N0,并且保持該角速度進行旋轉;當松開操作按鈕后,t0減速時間(t1~t1+t0)后,裝置吊鉤停止。
(1)
陀螺力矩M可表示為:
(2)

設ψ為裝置吊鉤與懸掛載荷之間的相對旋轉角,且φ為裝置本身的絕對旋轉角,則懸掛載荷的絕對旋轉角為ψ+ψ0+φ。
懸掛載荷繞垂直軸的運動方程為:
(3)
式中:I1—圍繞懸掛載荷垂直軸的慣性矩;c1—起重工具的阻尼系數;k1—起重工具的彈簧系數。
相對旋轉角ψ的計算方式如下:
(4)

筆者對該裝置機械陀螺阻尼器的物理模型進行分析。
從陀螺阻尼器側面(圖2)看,圍繞傾斜軸的運動方程為:
(5)

該裝置的運動方程可表示為:
(6)
式中:I3—繞裝置垂直軸的轉動慣量;μ—吊車吊鉤繞垂直軸的摩擦系數;T—懸掛載荷轉動反力矩;Tw—風力產生的扭矩。
轉動反力矩T的計算公式為:
(7)
根據式(5~7),可得出:
(8)
則φ可表示為:
(9)
根據式(4)和式(9),可以得到防擺控制裝置的控制框圖,如圖6所示。

圖6 防擺控制裝置的控制框圖
3 實驗與結果分析
3.1 實驗設置
為了驗證陀螺阻尼器抑制風力的有效性,筆者對所提防擺控制裝置進行了實驗。
防擺控制裝置的參數如表1所示。

表1 防擺控制裝置的參數
筆者利用陀螺傳感器[16](安裝在配重的位置上)測量了懸掛載荷的旋轉角,以及飛輪傾斜時產生的角速度和傾斜角。
陀螺儀傳感器的參數如表2所示。

表2 陀螺儀傳感器的參數
在被動控制和非被動控制條件下,為了驗證陀螺阻尼器的旋轉性能,筆者對該裝置進行了實驗。
實驗條件如下:
目標旋轉角度為100°,當按下輸入旋轉操作按鈕時,懸掛載荷的旋轉速度在1 s的加速時間達到1 r/min;當操作按鈕釋放時,裝置吊鉤在減速時間1 s后停止;
懸掛載荷為長3 500 mm、寬400 mm、重350 kg的鋼板。
實驗條件及實驗裝置如圖7所示。

圖7 實驗條件及裝置
3.2 防擺控制裝置的驗證
筆者用陀螺儀傳感器測量懸掛載荷圍繞垂直軸的旋轉角度。
旋轉角度如圖8所示。

圖8 旋轉角度
從圖8可以看出:在沒有控制的情況下,轉動時的反作用力矩和停止時的慣性力矩不能被抑制,懸掛載荷就會無意識地移動;如果有控制,轉動時的反作用力矩和慣性力矩可以被抑制,目標旋轉角度達到100°左右就會停止;雖然在裝置吊鉤下圍繞起重工具的垂直軸產生殘余振動,但沒有看到裝置本身的振動,且在60 s左右完全收斂。
如上所述,防擺控制裝置采用陀螺阻尼器進行被動控制,可以有效地抑制旋轉時的反作用力矩和停止時的慣性力矩,并且其達到了目標旋轉角度,驗證了該防擺控制裝置的有效性。
3.3 陀螺阻尼器的驗證
在上述實驗的相同條件下,筆者針對有和沒有機械陀螺儀彈簧的情況進行了測量(如果有彈簧,即為陀螺阻尼器)。
在帶彈簧和無彈簧的情況下,飛輪的傾斜角度如圖9所示。

圖9 飛輪的傾斜角度
從圖9可以看出:在兩種情況下,0~20 s的傾斜角度特性幾乎相同;但是,當沒有彈簧時,飛輪的最大傾斜角度約為19°,而帶彈簧時,飛輪傾斜角度相對較小,僅約為14°,相比無彈簧時減小了5°。
需重點關注的是:飛輪傾斜角度在20 s后由陀螺效應回到0°的情況。在無彈簧的情況下,大約需要40 s才能返回到0°。另一方面,當帶彈簧時,在大約23 s內返回到0°。
從這個結果可以看出,兩者相比,帶彈簧時可以減少17 s。也就是說,通過增加彈簧,可以抑制飛輪的最大傾斜角度,縮短回零前的偏移時間,偏移時間縮短了43%。
兩種情況下,飛輪傾斜時的角速度如圖10所示。

圖10 飛輪傾斜時的角速度
從圖10可以看出,飛輪傾斜時的角速度幾乎相同,這與式(2)所得結果相同,即陀螺力矩與飛輪傾斜時的角速度成正比。因此,加彈簧后對裝置工作效率產生不利影響。
由此證實,陀螺阻尼器實現了相同的最大陀螺力矩,減少了飛輪傾角的偏移時間,其有效性得到了驗證。
3.4 風力控制驗證
在風力控制驗證實驗中,其懸掛載荷的條件與防擺控制裝置驗證實驗時相同。一般情況下,在10 m/s的風速下,懸掛載荷是靜止不動的。因此,在此處的實驗條件下,筆者在懸掛載荷的頂端施加對應于20 m/s風速的擾動力矩(擾動力矩值13 Nm)。此時,通過手動推動并釋放懸掛載荷,直至飛輪達到45°傾斜角,并接觸到觸控傳感器。
在有風機和無風機時,懸掛載荷的旋轉角如圖11所示。

圖11 有風機和無風機時懸掛載荷的旋轉角
從圖11可以看出:當沒有風機時,陀螺力矩在10 s后消失,懸掛載荷和裝置一起旋轉,并且大約在95 s時收斂。這是因為在陀螺力矩下降后,起重機吊鉤旋轉,懸掛載荷和裝置一起旋轉);之后,由于起重機吊鉤存在摩擦力,懸掛載荷的旋轉逐漸收斂。此外,飛輪傾斜度逐漸被陀螺效應抵消;最后,陀螺力矩起工作,懸掛載荷停止擺動;
另一方面,在風機的風力作用下,飛輪傾斜度變為45°,此時的防擺控制裝置起作用;然后,在5 s之后,懸掛載荷繞垂直軸旋轉的角速度變為0,可以看到懸掛載荷停止擺動。由此可見,陀螺阻尼器可以效地抑制懸掛載荷的慣性力矩,直到懸掛載荷停止擺動。
上述結果表明:與無風機控制的情況相比,在有風機控制的情況下,懸掛載荷停止擺動所需的時間減少了90%,該結果驗證了風機風力控制的有效性。
4 結束語
本研究通過在機械陀螺儀中添加彈簧,構建起了一種陀螺阻尼器,并結合風力的調節作用,實現了對起重機吊重的防擺控制;通過真實測試,驗證了該裝置的有效性。
研究結果表明:
(1)針對單軸陀螺阻尼器的被動控制特性,提出了一種懸掛載荷防擺控制的概念,通過在框架結構側面增加帶彈簧的陀螺阻尼器,能夠使飛輪傾斜返回時間減少43%;
(2)根據陀螺力矩因連續擾動而消失的特點,提出了利用風力控制懸掛載荷姿態的新方法,通過風力對懸掛載荷受擾動旋轉的抑制作用實驗,結果表明,該方法可以使懸掛載荷停止所需的時間減少90%。
由于該裝置是被動控制,筆者僅增加一個彈簧而不是電機,節省了空間,從而使裝置的體積更小、重量更輕。該裝置可通過無線遙控的方式,將懸掛載荷旋轉到任意位置,以確保安全性和工作效率,即使不熟悉起重機的人也能夠輕松操作。
在后續研究中,筆者將使用更多類型的吊重物,對該懸掛載荷防擺控制裝置做進一步的可靠性驗證。