基于自適應S速度軌跡的塔式起重機變幅定位與防擺控制研究*
2022-01-27 11:04:08宋鵬程
機電工程 2022年1期
盧 寧,宋鵬程
(1.北京建筑大學 機電與車輛工程學院,北京 100032;2.北京市建筑安全監測工程技術研究中心,北京 100032)
0 引 言
塔式起重機(簡稱塔機)使用方便,具有高效的裝卸能力,被廣泛應用于生產建筑中[1]。
在塔機的作業過程中,吊物由于慣性作用易發生擺動,影響工作效率,同時易導致危險發生[2]。為防止吊物擺動,保證塔機上的小車定位精度,設計一種合理的控制策略十分必要[3]。
目前,針對起重機的定位防擺問題,學者們進行了大量研究,其中包括:(1)以角度、位移作為反饋量的閉環控制策略,例如模糊控制[4]、迭代學習控制[5]、神經元控制[6]、滑模控制[7]等;(2)以及無反饋量的開環控制策略,包括軌跡規劃[8]、輸入整形[9]等。
閉環控制中需增加傳感器,對位移、擺角等反饋量進行獲取,傳感器性能對控制效果影響較大;開環控制方式對控制元器件性能要求低,常用于工程機械的控制中。因此,筆者選用開環控制方式對變幅運動進行研究。
隨著計算機仿真技術發展,人們對工程要求不斷提高。火箭軍工程大學的劉春桐[10]利用MATLAB/Simulink、ADAMS建立了基于模糊PID控制的橋式起重機聯合仿真模型,經仿真得到了結論,即模糊控制對吊物擺角的抑制效果較傳統PID控制有明顯提升。上海海事大學的呂錦超[11]通過MATLAB/Simulink與ADAMS聯合仿真的方式,驗證了雙PID控制對于小車定位防搖具有良好控制效果。
上述研究以起重機的數學模型為依據,通過控制小車的驅動力,完成對小車定位及吊物防擺的控制,忽略了電機回路狀態、控制系統參數等因素對驅動力輸出的影響[12]。
因此,考慮到軌道摩擦力[13]等非線性因素,筆者將變頻器、異步電機以及變幅傳動系統加入考慮范圍,提出一種基于自適應七段式S速度軌跡的控制策略,將小車的運動過程分為加加速、勻加速、減加速、勻速、加減速、勻減速、減減速七段速度軌跡,并對不同工況下的小車變幅過程進行機電聯合仿真。
1 定位及防擺數學模型
為了尋找影響塔機吊物擺角的因素,筆者做了以下假設:(1)把吊物視作質點;(2)忽略鋼絲繩的質量和形變;(3)忽略空氣阻力影響。
小車在水平方向驅動力F的影響下沿X軸正方向移動,其運動關系如圖1所示。

圖1 變幅運動示意圖M—小車質量;m—吊物質量;l—鋼絲繩長度;X—小車定位距離;f—小車與軌道的摩擦力;θ—吊物與Y軸的夾角
根據Lagrange動力學方程[14,15],筆者以小車運動的初始狀態建立其數學模型:
(1)
在防擺過程中,由于吊鉤角度變化逐漸趨于0°,筆者在平衡點附近對其進行線性化,令sinθ=0,cosθ=1,又因:
(2)
所以,式(1)可化簡為:
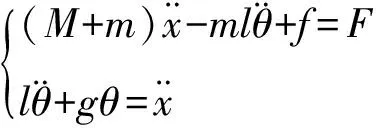
(3)
對式(3)進行變形可得:

(4)
同時:
a=d2x/dt2
(5)
式中:a—小車的加速度。
由式(4,5)可知:當確定了吊物的質量以及鋼絲繩長度后,小車的加速度成為影響小車位移以及吊物擺角的關鍵因素。因此,需要合適的控制方法對小車的加速度進行控制,來實現定位與防擺的控制目標。
考慮到異步電動機的復雜特性,通過控制電動機的輸出力矩,來控制小車加速度的方式較難實現[16]。因此,筆者選用速度控制方式,以電機轉速作為輸入量,對小車加速度進行控制。
2 自適應S軌跡算法
2.1 傳統七段式S軌跡理論
目前常用的速度規劃算法包括直線加減速、指數加減速、梯形(勻加速,勻速,勻減速)、S形以及多項式加減速[17]等。
考慮到塔機變幅驅動電機的機械特性與吊物的防擺效果,只有梯形、S形、多項式加減速算法適用于塔機的速度規劃。其中:(1)梯形加減速算法,加速度曲線不連續,加速度突變對吊物擺角影響較大;(2)多項式加減速算法復雜,對工作元件的性能要求極高,難以應用在塔機變幅運動中;(3)S形軌跡平穩性高,且加速度曲線無突變,對吊重擺角影響較小。因此,筆者選取S形速度軌跡算法進行控制。
基于S形軌跡理論,將小車整個變幅過程分為7段,包括加加速、勻加速、減加速、勻速、加減速、勻減速、減減速。考慮到塔機變幅機構對速度和加速度的限制性要求,此處規定小車運動速度不超過變幅運動的最大速度Vmax,加速度不超過變幅運動的最大加速度amax;同時設加加速度為常量J。
對加加速度J規劃如圖2所示。
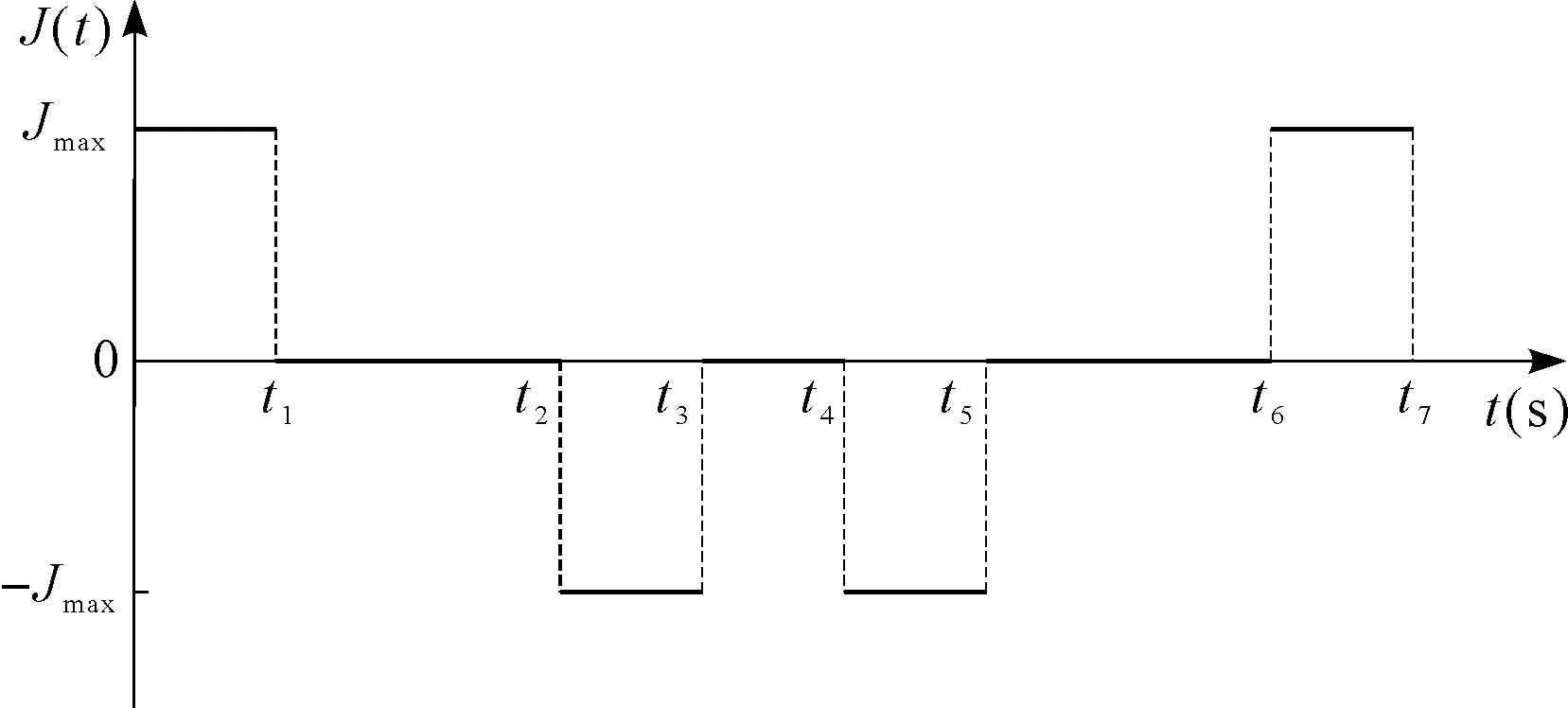
圖2 加加速度規劃圖t—小車加加速度變化的時間節點;Jmax—加加速度的最大值
J與時間t(s)的關系如下:
(6)
塔機變幅運動中,小車的起始速度與終止速度都為0。根據變幅過程中吊物的擺動規律,必須保證加加速、減加速、加減速、減減速這4個時間段相等[18],則有:
t1-0=t3-t2=t5-t4=t7-t6
(7)
根據加加速度J值,規劃加速度a如圖3所示。
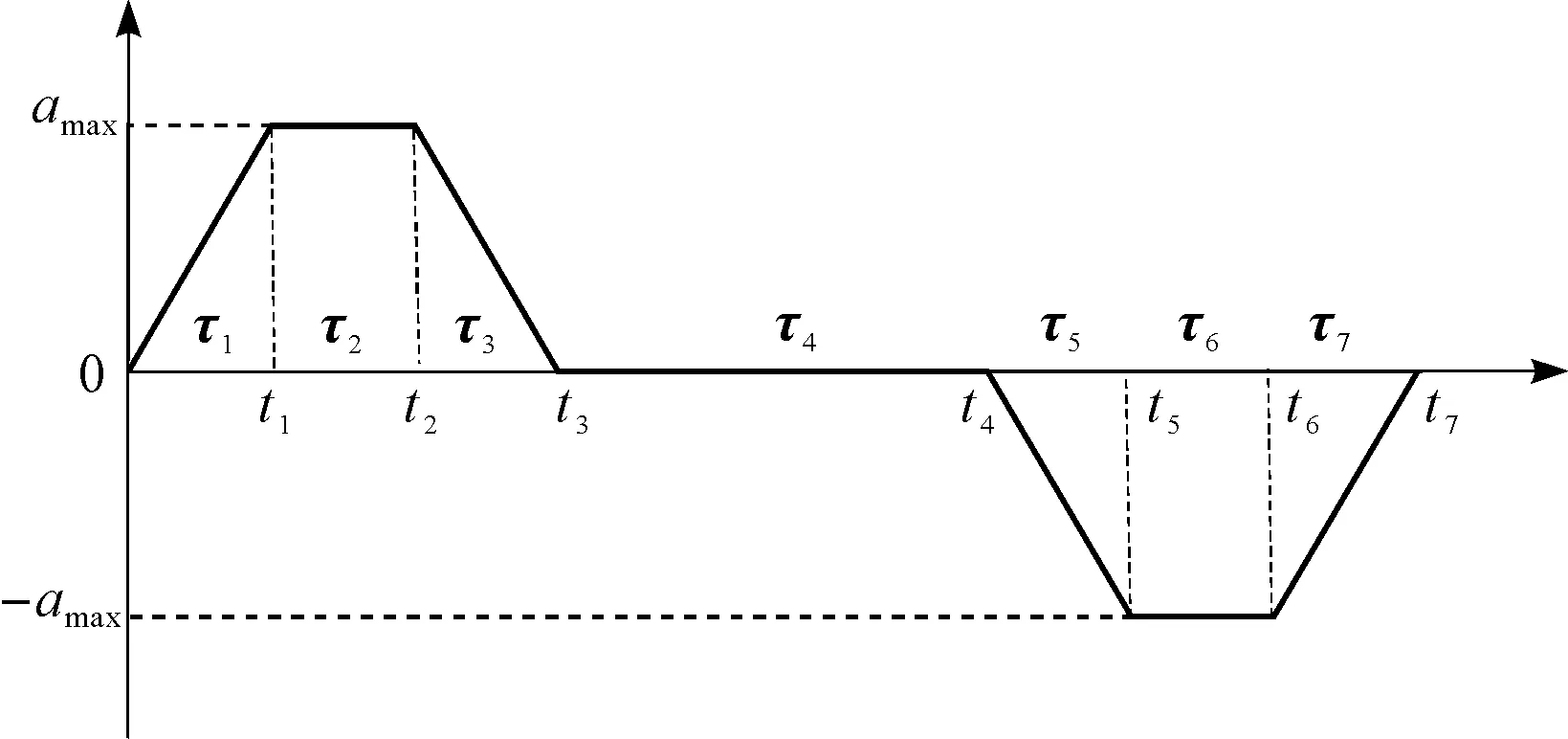
圖3 加速度規劃圖τ—以當前時間節點出發的時間矢量;amax—加速度的最大值
加速度a與加加速度J、時間t(s)的關系如下:
(8)
其中:
amax=Jt1
(9)
由加速度曲線得到速度曲線如圖4所示。

圖4 速度曲線規劃圖Vmax—速度最大值
速度V與加速度a、時間t(s)的關系如下:
V(t)=
(10)
2.2 自適應S形軌跡算法
傳統S形軌跡算法需要確定小車最大速度Vmax、最大加速度amax以及加加速度J。當加加速度選擇不合適時,會造成加速度的突變,不利于吊物防擺;同時,在塔機定位防擺控制中,需對變幅小車進行點到點的軌跡規劃。
因此,筆者在傳統S形軌跡算法的基礎上,提出自適應S形軌跡算法,即通過規定小車的目標位移距離值、限制速度和加速度的最大值,以及確定整體作業時間Tf,對小車變幅的速度軌跡進行規劃。
基于自適應S形軌跡算法,可計算出小車的加加速度,即:
(11)
為減少加速度突變對擺角的影響,此處規定小車變幅運動必須具有勻加速段、勻速段以及勻減速段,由此得:
(12)
(13)
由于自適應S形軌跡算法計算量較大,在規定了前提條件以后,筆者采用MATLAB編寫函數實現算法。
自適應算法流程如圖5所示。

圖5 自適應算法流程圖
3 機電聯合仿真平臺
根據小車變幅系統的控制要求,筆者采用PLC、變頻器以及三相異步電動機作為電氣控制系統,通過減速器、卷筒以及鋼絲繩等構成的傳動系統對小車速度進行控制。
小車控制結構圖如圖6所示。

圖6 小車控制結構圖
3.1 矢量控制系統建模
由于異步電機的矢量控制理論發展成熟,且易于實現,筆者選取矢量控制方式,在Simulink中建立電機變頻調速模型。由于異步電機系統復雜且耦合性強,建立其數學模型時需忽略空間諧波、磁路飽和、繞組電阻以及鐵芯損耗的影響[19]。
筆者以轉子磁鏈定向的方式建立電機矢量控制數學模型:
(1)電壓方程:
(14)
(2)磁鏈方程:
(15)
(3)轉矩方程和運動方程:
Te=npLm(isqird-isdirq)
(16)
(17)
當兩相旋轉坐標系按轉子磁鏈定向時,有Φrd=Φr,Φrq=0,可得:
(18)
式中:Usd,Usq—定子等效繞組電壓;Urd,Urq—轉子等效繞組電壓;wdqs,wdqr—定、轉子相對角速度;Rs,Rr—定、轉子繞組電阻;Φsd,Φsq—定子磁鏈;Φrd,Φrq—轉子磁鏈;Lm—定、轉子等效繞組互感;Ls,Lr—定、轉子等效繞組自感;isd,isq—定子等效繞組電流;ird,irq—轉子等效繞組電流;P—微分算子;Te—電磁轉矩;np—電機極對數;TL—負載轉矩;J—電機等效轉動慣量;ω—電機轉子的轉速。
由式(18)可知,只需控制isq,便可對電磁轉矩進行控制。
基于上述數學模型,為保證電機轉速的跟蹤性能,筆者選取通過電流滯環控制PWM逆變器的異步電機矢量控制方法(其轉速環、電流環采取PI控制器)。
為驗證控制策略的有效性,此處選用合適的電機參數,如表1所示。
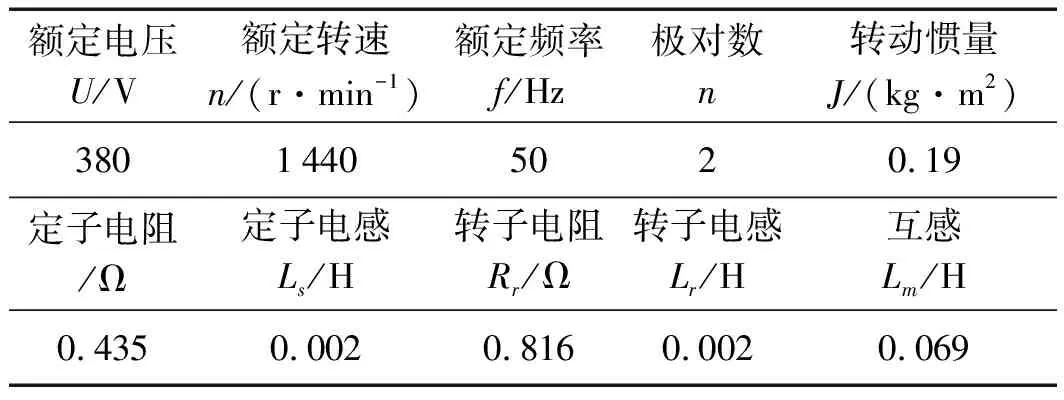
表1 電機參數表
3.2 系統動力學建模
塔機傳動系統包括小車、滑輪、減速器與鋼絲繩等。筆者在SolidWorks軟件中建立塔機變幅機構的實體模型,并將其導入ADAMS中。
在變幅運動中,由于鋼絲繩柔性的特點,難以建立較精確的非線性動力學模型。因此,筆者使用ADAMS/Cable模塊建立鋼絲繩系統[20],并依據工程經驗,在Cable模塊中設置鋼絲繩參數,并確定滑輪和錨點的具體位置[21](其中,吊鉤處連接滑輪為動滑輪,小車處連接滑輪為定滑輪)。
筆者在ADAMS中為模型添加部件約束以及運動副,如表2所示。

表2 約束/運動副設置表
在ADAMS中,變幅機構動力學模型如圖7所示。
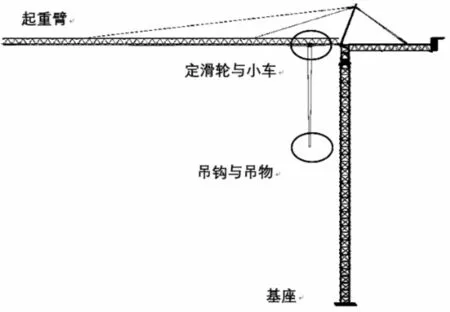
圖7 變幅機構動力學模型
在ADAMS中,鋼絲繩和滑輪的纏繞方式局部放大圖如圖8所示。
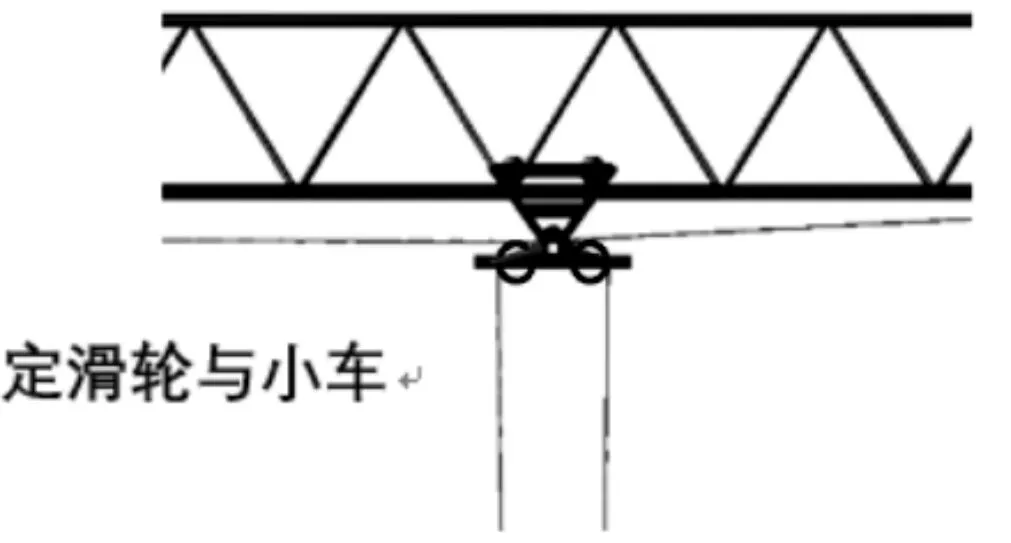
圖8 小車局部放大圖
3.3 聯合仿真平臺搭建
筆者利用自適應S形軌跡算法,對變幅小車的速度進行控制,取減速比為24,對小車的最大加速度與最大速度進行限制;確定ADAMS模型的輸入狀態變量為小車速度V,輸出狀態變量為小車位移S,吊鉤角度為θ;利用ADAMS/Controls接口將模型導入Simulink中進行聯合仿真。
機電聯合仿真過程如圖9所示。
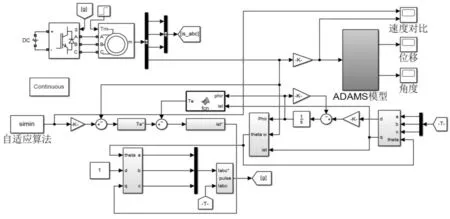
圖9 機電聯合仿真圖
4 仿真分析
4.1 不同速度軌跡對比研究
考慮到算法的適用性,此處選取梯形軌跡與S形軌跡進行對比研究。筆者分別選取工況一:繩長20 m,變幅距離20 m,起重量0.5 t;工況二:繩長30 m,變幅距離30 m,起重量1 t進行仿真。
此處設定小車最大速度不超過1.2 m/s,最大加速度不超過2 m/s2,仿真時間為40 s。
仿真結果如圖(10~13)所示。
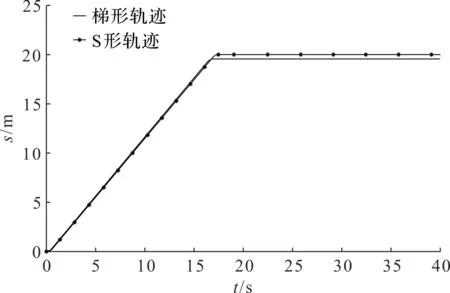
圖10 工況一小車位移圖
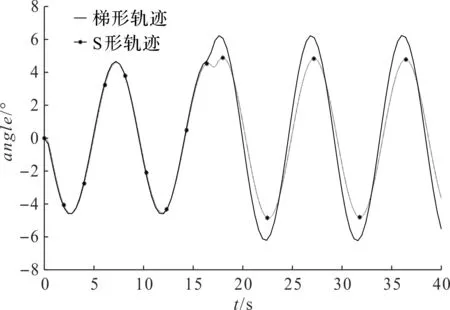
圖11 工況一小車擺角圖
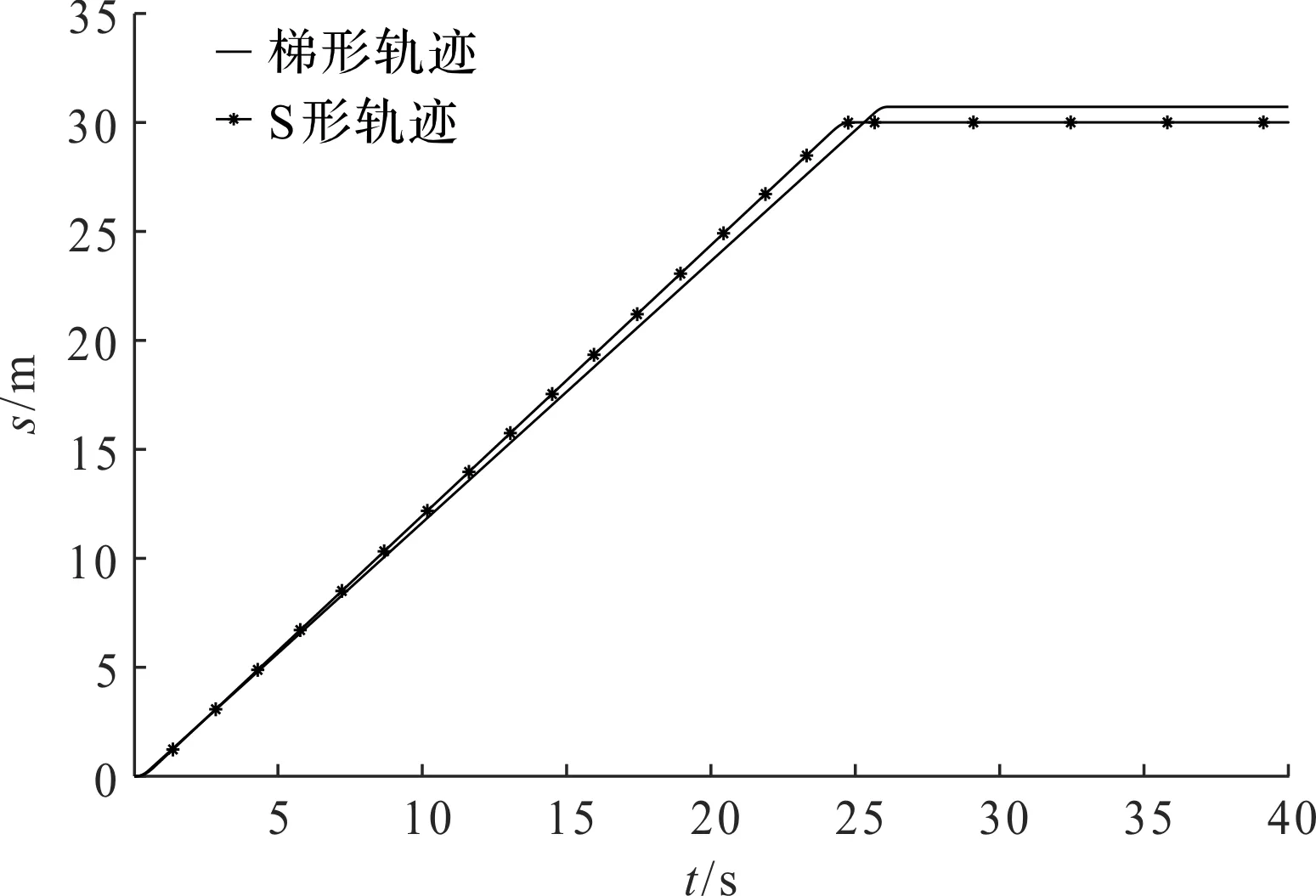
圖12 工況二小車位移圖
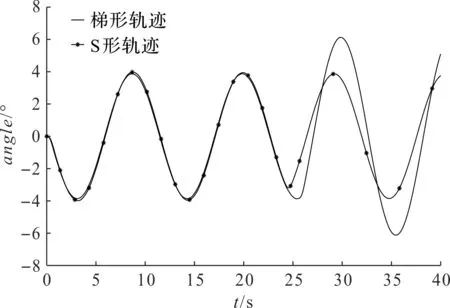
圖13 工況二小車擺角圖
由圖(10,12)可知:兩種軌跡下,小車均能到達指定位置附近,且S形軌跡算法定位更精確;
由圖(11,13)可知:小車停止后,吊物由于自身慣性以及重力的影響,仍將處于搖擺狀態;梯形軌跡下,吊物擺角的最大幅值為6.5°,S形軌跡將擺角幅值限制在了5°以內,較梯形軌跡減小了23%,可以更好地符合作業安全性要求。該結果證明,S形軌跡較梯形軌跡有更好的防搖性能。
4.2 不同工況對比研究
筆者采取控制變量法,取不同繩長(l)、吊物重量(g)以及變幅距離(s)的工況進行仿真。同樣,此處限制小車的最大速度、最大加速度,取仿真時間為40 s。
仿真工況如表3所示。
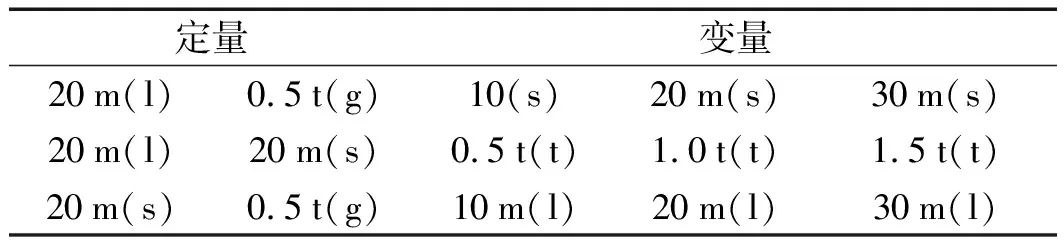
表3 仿真工況表
仿真結果如圖(14~19)所示。
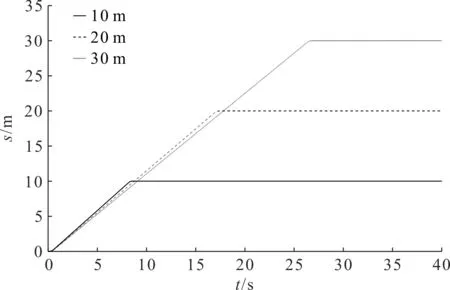
圖14 不同變幅距離小車位移圖

圖15 不同變幅距離小車擺角圖

圖16 不同吊物重小車位移圖

圖17 不同吊物重小車擺角圖
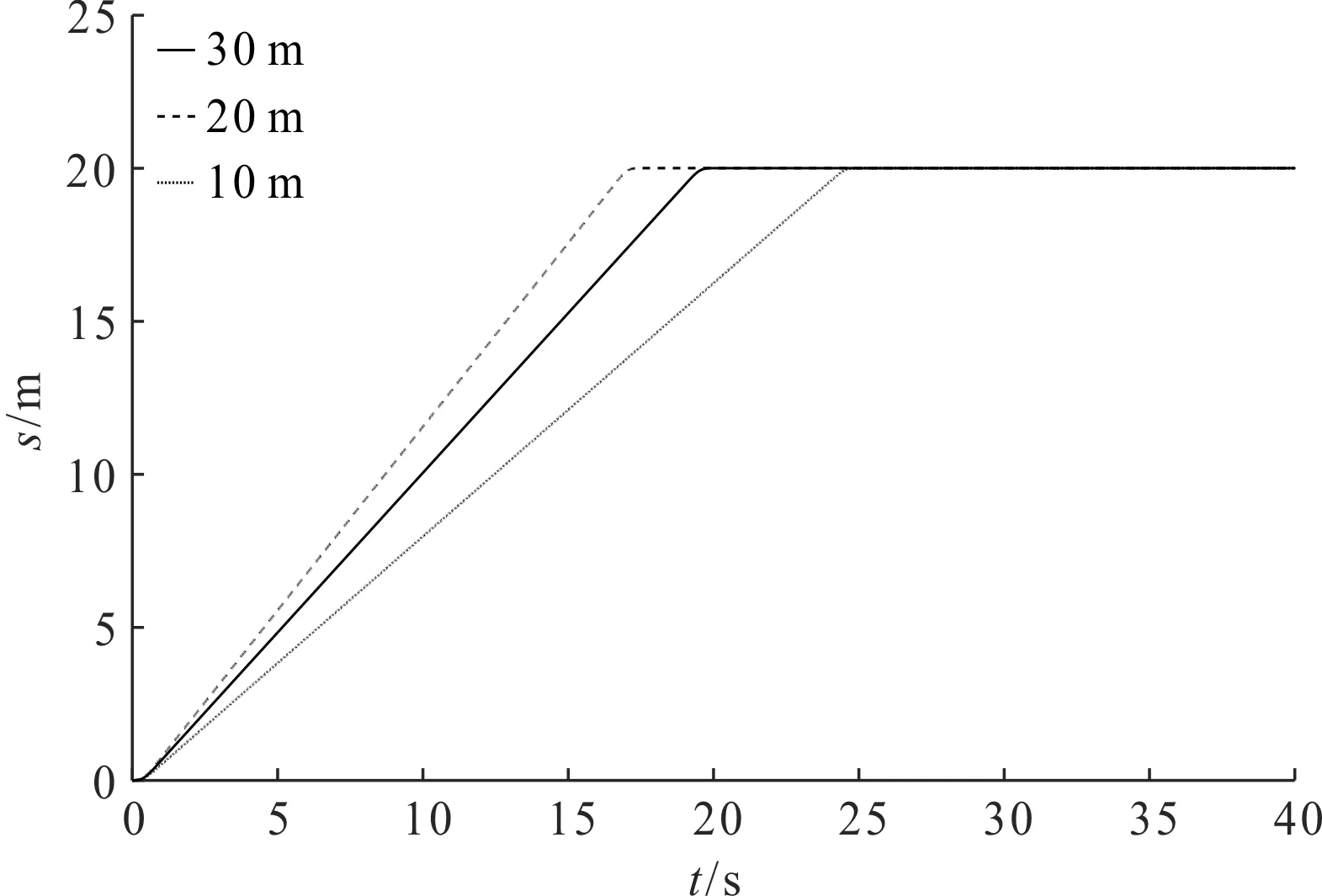
圖18 不同繩長小車位移圖
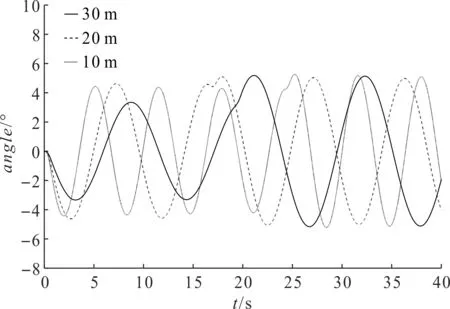
圖19 不同繩長小車擺角圖
綜合分析圖(14~17)可知:在變幅距離不同和吊物重量不同的工況下,小車均能到達指定位置附近;且在S形軌跡的規劃下,吊物擺角都能被限制在5°左右,符合塔機作業的安全性要求。
分析圖(18,19)可知:在不同繩長工況下,采用S形軌跡雖能達到小車定位與吊物防擺的要求,但由于S形軌跡算法中對吊物防擺要求的限制,小車到達指定位置的時間不同,影響了作業效率。
因此,在實際作業中,為兼顧作業效率與安全性,應選擇合適的起升距離。同時,觀察圖19仿真結果可知,吊物的擺動周期隨著繩長的增加而增大,這與文獻[22]的結論相吻合。
5 結束語
為防止塔式起重機變幅作業過程中,由于吊物的擺動造成危險,筆者利用Lagrange方程找出影響塔機吊物擺動的因素,提出了一種自適應S形速度軌跡算法,來解決小車的定位和吊物的防擺問題,并建立了基于PI控制的塔機變幅機構機-電聯合仿真模型,對該控制策略進行了驗證。
研究結果表明:
(1)S形速度軌跡的定位防擺效果優于梯形軌跡;
(2)S形速度軌跡對于變幅運動的多種工況都具有良好的定位效果,且都能將吊物擺角限制在5°左右;
(3)鋼絲繩長度影響吊物的擺動周期,且兩者呈正相關性。
此外,為了更好地研究鋼絲繩長度變化對吊物擺動的影響,在后續的研究工作中,筆者將起升運動與變幅運動進行耦合考慮,并綜合分析該控制策略的防擺性能。