基于A(yíng)DAMS和MATLAB的非圓錐齒輪傳動(dòng)機(jī)構(gòu)仿真研究*
2022-01-27 11:03:54周凱紅郭玉田黃思敏
機(jī)電工程 2022年1期
關(guān)鍵詞:模型
周凱紅,郭玉田,黃思敏
(桂林理工大學(xué) 機(jī)械與控制工程學(xué)院,廣西 桂林 541006)
0 引 言
作為一種新型的齒輪傳動(dòng)機(jī)構(gòu),非圓錐齒輪機(jī)構(gòu)能實(shí)現(xiàn)相交軸之間的變速比傳動(dòng),具有結(jié)構(gòu)緊湊、傳動(dòng)效率高等優(yōu)點(diǎn)[1,2]。目前,非圓錐齒輪已在限滑差速器、變量齒輪泵、步進(jìn)裝置等方面得到了應(yīng)用[3-7]。
非圓錐齒輪節(jié)曲線(xiàn)具有復(fù)雜性,球面節(jié)曲線(xiàn)不是一個(gè)圓,除了具有對(duì)稱(chēng)性之外,任意兩個(gè)齒有著不同的齒廓曲線(xiàn),一個(gè)齒的左邊和右邊齒廓曲線(xiàn)也不相同[8-13],這使得非圓錐齒輪在傳動(dòng)過(guò)程中存在著較大的振動(dòng)和沖擊。
如何使非圓錐齒輪在傳動(dòng)過(guò)程中運(yùn)行得更加平穩(wěn),是目前研究的熱點(diǎn)。林超、侯玉杰等人[14]對(duì)非圓錐齒輪的傳動(dòng)特性進(jìn)行了分析,推導(dǎo)出了相應(yīng)的公式,獲得了其傳動(dòng)的運(yùn)動(dòng)規(guī)律和變化關(guān)系。李文長(zhǎng)、賈巨民等人[15]利用保測(cè)地曲率映射的方法,通過(guò)改變其傳動(dòng)比規(guī)律,設(shè)計(jì)出非圓錐齒輪,并對(duì)其進(jìn)行了運(yùn)動(dòng)學(xué)仿真分析,得出了結(jié)論,即通過(guò)增加齒數(shù)、減小鎖緊系數(shù)可使其傳動(dòng)更加平穩(wěn)。譚偉明[16]通過(guò)在高階橢圓齒輪泵中增加非圓齒輪對(duì)數(shù),利用相互補(bǔ)償?shù)姆椒?使得齒輪泵運(yùn)轉(zhuǎn)時(shí)的波動(dòng)大大降低;其中,3個(gè)三階橢圓齒輪組合時(shí),該結(jié)構(gòu)降低波動(dòng)的效果最好。
綜上所述,目前對(duì)非圓錐齒輪傳動(dòng)性能的研究大多在理論層面上,關(guān)于如何減少傳動(dòng)過(guò)程中振動(dòng)和沖擊的研究較少,且沒(méi)有涉及到機(jī)電一體化控制方面的研究。
ADAMS能很好地反映出實(shí)際的物理模型,其仿真的結(jié)果也與實(shí)際分析結(jié)果相近[17]。MATLAB/Simulink是集眾多功能在一個(gè)可視化環(huán)境中的強(qiáng)大控制仿真模塊[18],能夠快捷、方便地建立仿真模型。
本研究采用ADAMS和MATLAB聯(lián)合仿真的方法,控制非圓錐齒輪副中主動(dòng)輪的轉(zhuǎn)速,從而降低嚙合傳動(dòng)中的振動(dòng)和沖擊,為研究非圓錐齒輪復(fù)雜傳動(dòng)系統(tǒng)提供一種新的方法。
1 非圓錐齒輪模型及分析
1.1 節(jié)曲線(xiàn)的設(shè)計(jì)
設(shè)非圓錐齒輪的傳動(dòng)比函數(shù)為[19]:
(1)
式中:z1,z2—齒輪1、2的齒數(shù);c—控制非圓錐齒輪傳動(dòng)比的變化極限,小于1的一個(gè)常系數(shù),也可以看作是齒輪的偏心率;N1—非圓錐齒輪的階數(shù);φ1—主動(dòng)輪的轉(zhuǎn)角。
當(dāng)非圓錐齒輪的軸間夾角為90°時(shí),其傳動(dòng)比函數(shù)又可以表示為[20]:
(2)
式中:δ1,δ2—齒輪1、2錐頂角的一半;φ1,φ2—齒輪1、2的轉(zhuǎn)角;dφ1,dφ2—齒輪1、2的瞬時(shí)角速度。
以齒輪的軸線(xiàn)為z軸,建立球面坐標(biāo)系,可得到其球面節(jié)曲線(xiàn)方程:
r(δ,φ)=Rsinδcosφi+Rsinδsinφj+Rcosδk
(3)
式中:R—球面半徑;i,j,k—兩兩相互垂直的方向矢量。
聯(lián)立式(1~3),并取c=0.2、R=100、z1=z2=54,N1=2;再用MATLAB軟件編程,便可得到2階單個(gè)非圓錐齒輪球面節(jié)曲線(xiàn),如圖1所示。
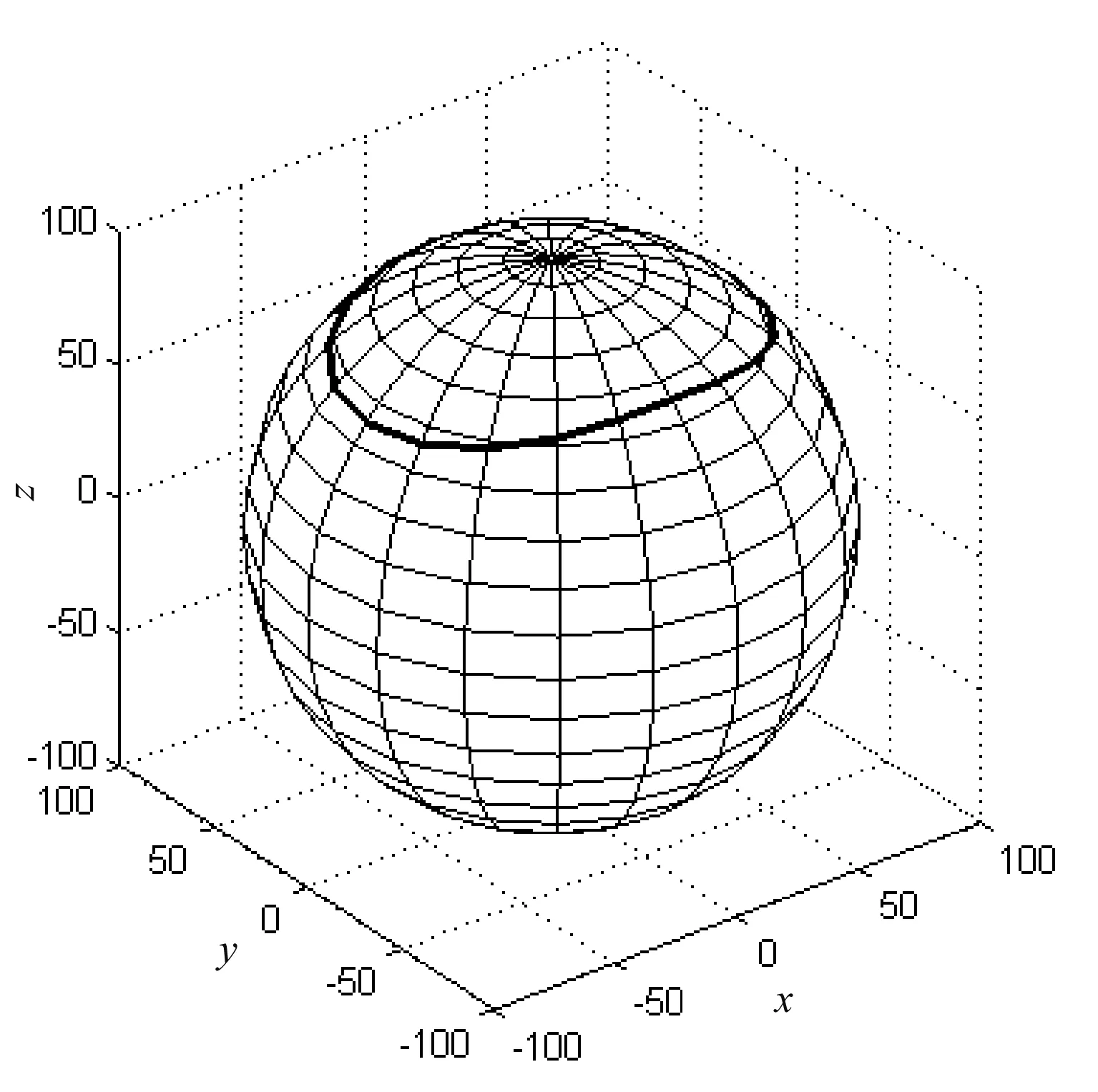
圖1 非圓錐齒輪節(jié)曲線(xiàn)
1.2 模型的建立
齒輪齒形的平面直角坐標(biāo)方程為[21]48-49:
(4)
(5)
(6)
(7)
式中:ψ—節(jié)曲線(xiàn)上任一點(diǎn)的切線(xiàn)方向與x軸夾角;s—節(jié)曲線(xiàn)與齒形的交點(diǎn)到n點(diǎn)的齒形法線(xiàn)與節(jié)曲線(xiàn)交點(diǎn)之間的節(jié)曲線(xiàn)弧長(zhǎng);αn—齒條刀具齒形角。
根據(jù)逆投影關(guān)系,筆者采用將當(dāng)量齒形投影到球面漸開(kāi)線(xiàn)齒形[21]49的方法,并結(jié)合微分幾何知識(shí)[22],給定了非圓錐齒輪的齒數(shù)、模數(shù)、偏心率、外錐距等相關(guān)參數(shù)。
利用MATLAB和UG畫(huà)圖軟件,筆者得到了非圓錐齒輪模型,如圖2所示。

圖2 非圓錐齒輪模型
1.3 階數(shù)和偏心率對(duì)傳動(dòng)比的影響
由式(1)可知:階數(shù)N1、偏心率c均對(duì)傳動(dòng)比函數(shù)有影響。
當(dāng)偏心率c=0.2,取N1=[2,3,4],則傳動(dòng)比的變化規(guī)律如圖3所示。
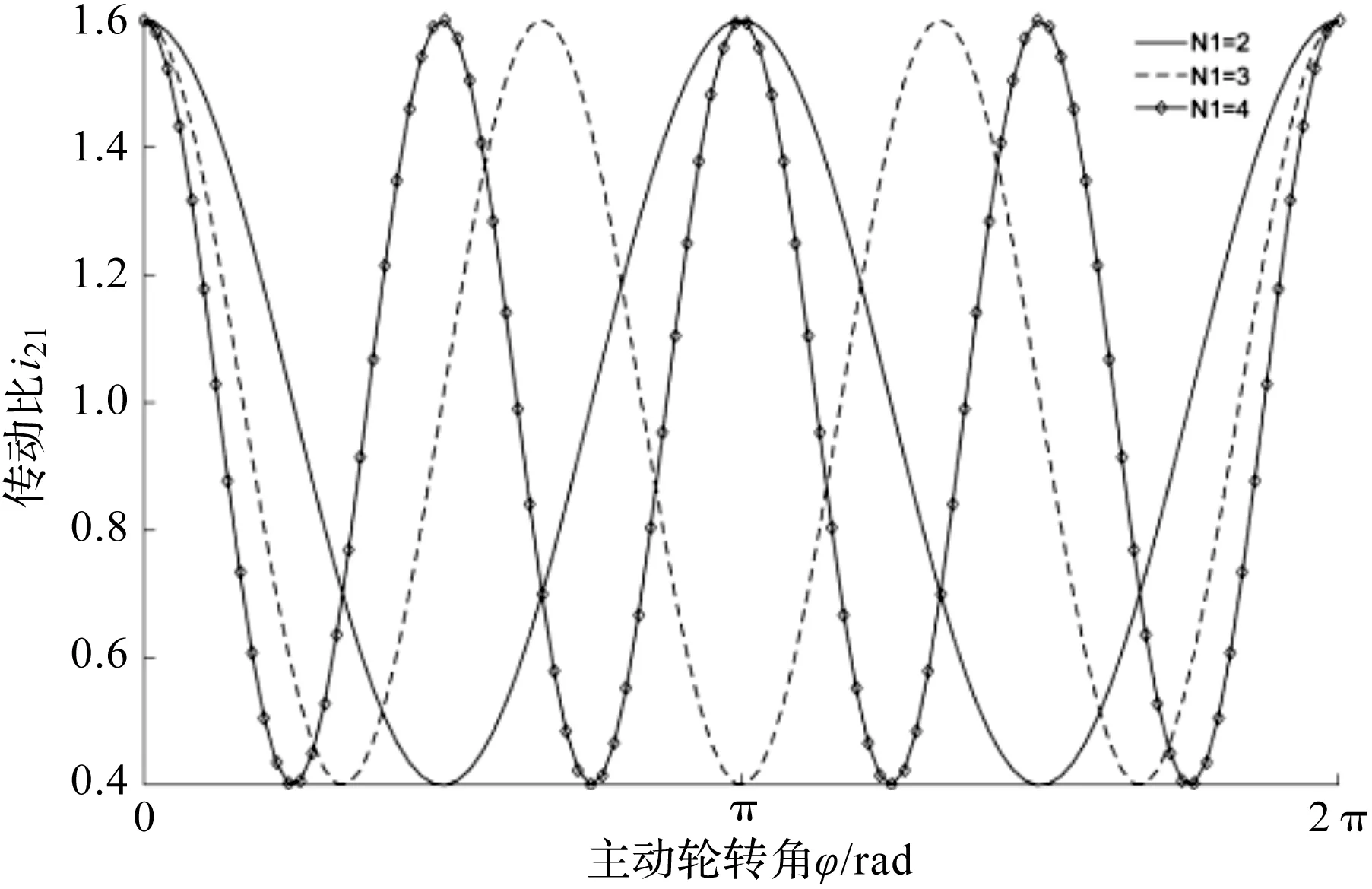
圖3 階數(shù)對(duì)傳動(dòng)比的影響
從圖3中可以看出:當(dāng)偏心率一定時(shí),階數(shù)增大,傳動(dòng)比曲線(xiàn)的上下幅值不變,周期減小,頻率增大。
當(dāng)階數(shù)N1=2時(shí),取偏心率c為0.1,0.2,0.3,0.4,0.5,其曲線(xiàn)圖如圖4所示。

圖4 偏心率對(duì)傳動(dòng)比的影響
從圖4中可看出:當(dāng)階數(shù)一定時(shí),隨著偏心率的增加,傳動(dòng)周期沒(méi)有發(fā)生任何變化,而傳動(dòng)比曲線(xiàn)的上下波動(dòng)幅值增大,即在非圓錐齒輪嚙合傳動(dòng)中的振動(dòng)、沖擊增大,影響齒輪運(yùn)動(dòng)的平穩(wěn)性和使用壽命。
因此,在滿(mǎn)足預(yù)定傳動(dòng)比大小的情況下,應(yīng)盡量減小偏心率。
2 ADAMS和MATLAB聯(lián)合仿真
采用聯(lián)合仿真技術(shù),可避免對(duì)復(fù)雜微分方程進(jìn)行推導(dǎo),便于直觀(guān)、及時(shí)地發(fā)現(xiàn)設(shè)計(jì)模型存在的問(wèn)題,提高設(shè)計(jì)效率、降低成本。
2.1 虛擬模型的建立
對(duì)于簡(jiǎn)單的幾何模型而言,可以直接在A(yíng)DAMS中進(jìn)行建模。而對(duì)于比較復(fù)雜的模型和裝配體,則需借助其他的畫(huà)圖軟件進(jìn)行建模(如SolidWorks、UG、Creo等[23]),并將建立好的模型另存為.x_t或.stp等格式,導(dǎo)入到ADAMS中。
筆者以2階、偏心率為0.2的非圓錐齒輪副為例,進(jìn)行聯(lián)合仿真(若選取不同階數(shù)和偏心率的非圓錐齒輪,僅需改變MATLAB/Simulink控制模塊中“Fcn”自定義函數(shù)對(duì)應(yīng)的參數(shù)即可,對(duì)控制模塊的整體框架沒(méi)有影響)。采用聯(lián)合仿真技術(shù),可避免對(duì)復(fù)雜微分方程進(jìn)行推導(dǎo),便于直觀(guān)、及時(shí)地發(fā)現(xiàn)設(shè)計(jì)模型存在的問(wèn)題,提高設(shè)計(jì)效率、降低成本。
在畫(huà)圖軟件中,筆者建立好非圓錐齒輪裝配體模型,另存為.stp格式,導(dǎo)入到ADAMS中打開(kāi);同時(shí),按實(shí)際情況,對(duì)非圓錐齒輪的基本信息進(jìn)行設(shè)置;
此處定義齒輪的材料為鋼,給主動(dòng)輪、從動(dòng)輪分別添加以“ground”為參考對(duì)象的旋轉(zhuǎn)副;主動(dòng)輪與主動(dòng)軸固定,從動(dòng)輪與從動(dòng)軸固定。
添加的零件運(yùn)動(dòng)副如表1所示[24]。
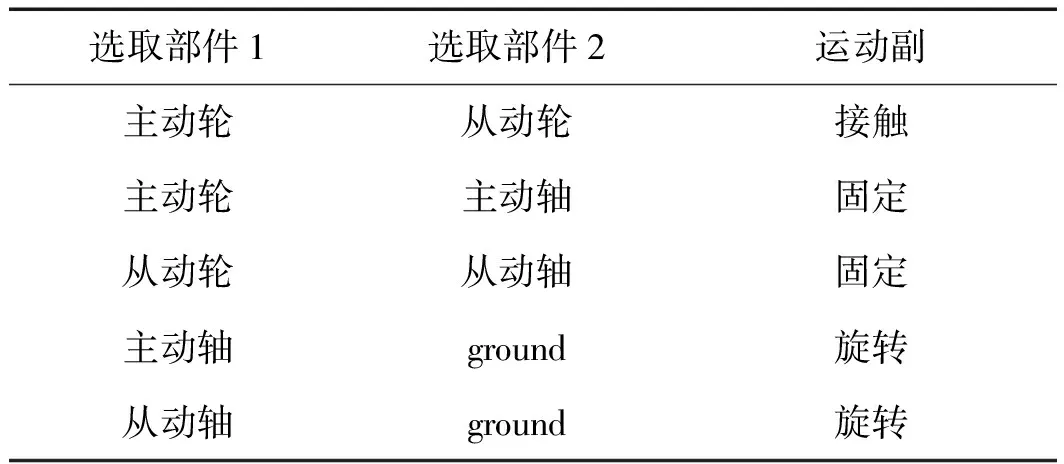
表1 添加的零件運(yùn)動(dòng)副
筆者給主動(dòng)輪添加驅(qū)動(dòng),給從動(dòng)輪添加負(fù)載,且兩個(gè)齒輪的接觸設(shè)置為“碰撞接觸”。
碰撞參數(shù)的設(shè)定[25]如表2所示。
非圓錐齒輪嚙合的虛擬模型如圖5所示。
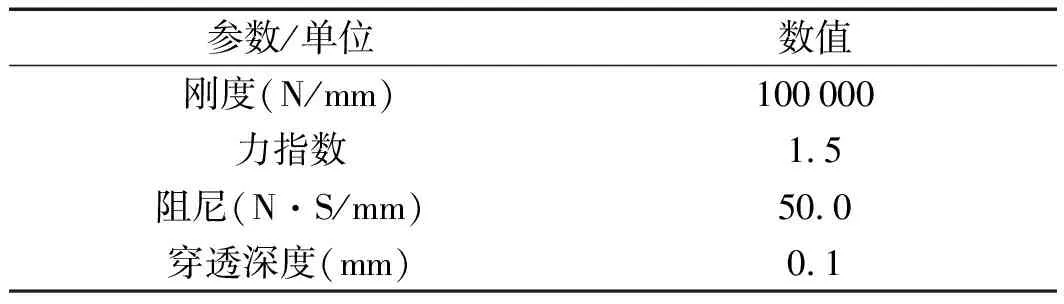
表2 碰撞接觸參數(shù)

圖5 非圓錐齒輪ADAMS模型
2.2 輸入輸出變量定義
在A(yíng)DAMS與MATLAB/Simulink之間,由單向狀態(tài)變量進(jìn)行數(shù)據(jù)傳遞[26]。在計(jì)算過(guò)程中,單向狀態(tài)變量是包含一系列數(shù)值的數(shù)組,代表輸入、輸出等提前擬定好的參數(shù)[27]。
在A(yíng)DAMS中,設(shè)定的輸出變量是MATLAB/Simulink控制系統(tǒng)的輸入變量,通過(guò)控制系統(tǒng)的分析計(jì)算,輸出信號(hào)又返回作為ADAMS的輸入變量,如圖6所示。
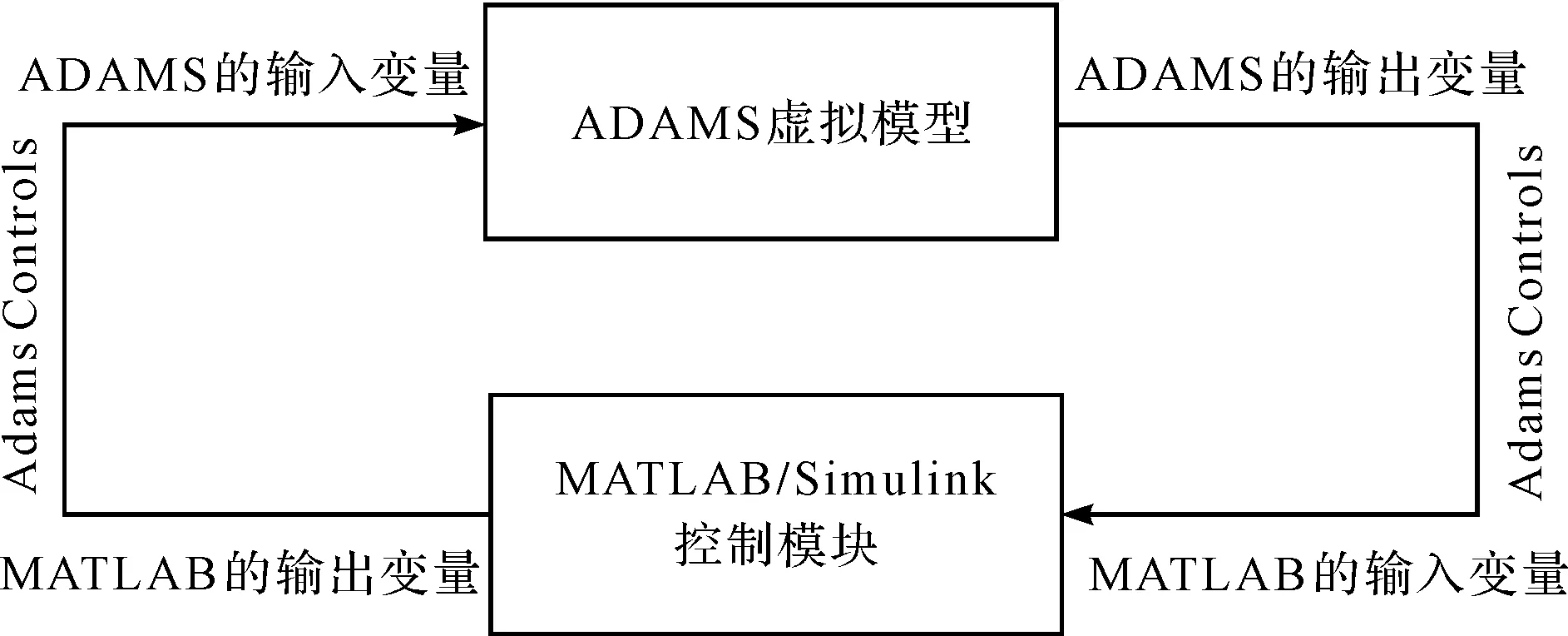
圖6 ADAMS/MATLAB的輸入輸出關(guān)系
筆者在A(yíng)DAMS中設(shè)置的輸入和輸出變量如下:
(1)定義輸入的主動(dòng)輪旋轉(zhuǎn)角速度和從動(dòng)輪負(fù)載為:input_av,load_force;
(2)定義輸出的從動(dòng)輪角速度、角加速度、碰撞接觸力為:output_av,output_ac,contact_force。
筆者在A(yíng)DAMS/Control中進(jìn)行參數(shù)的設(shè)定,建立起與MATLAB/Simulink的連接,如圖7所示。
2.3 MATLAB/Simulink中機(jī)械系統(tǒng)的生成
打開(kāi)MATLAB軟件,在命令行窗口輸入導(dǎo)出生成的.m文件名,便生成輸入、輸出信息,如圖8所示。

圖7 ADAMS/Control窗口
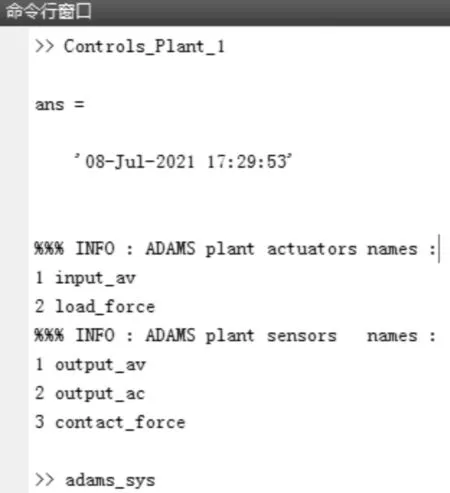
圖8 MATLAB生成的輸入輸出信息
接著筆者輸入Adams_sys,得到非圓錐齒輪機(jī)械系統(tǒng)Adams_sub模塊,如圖9所示。
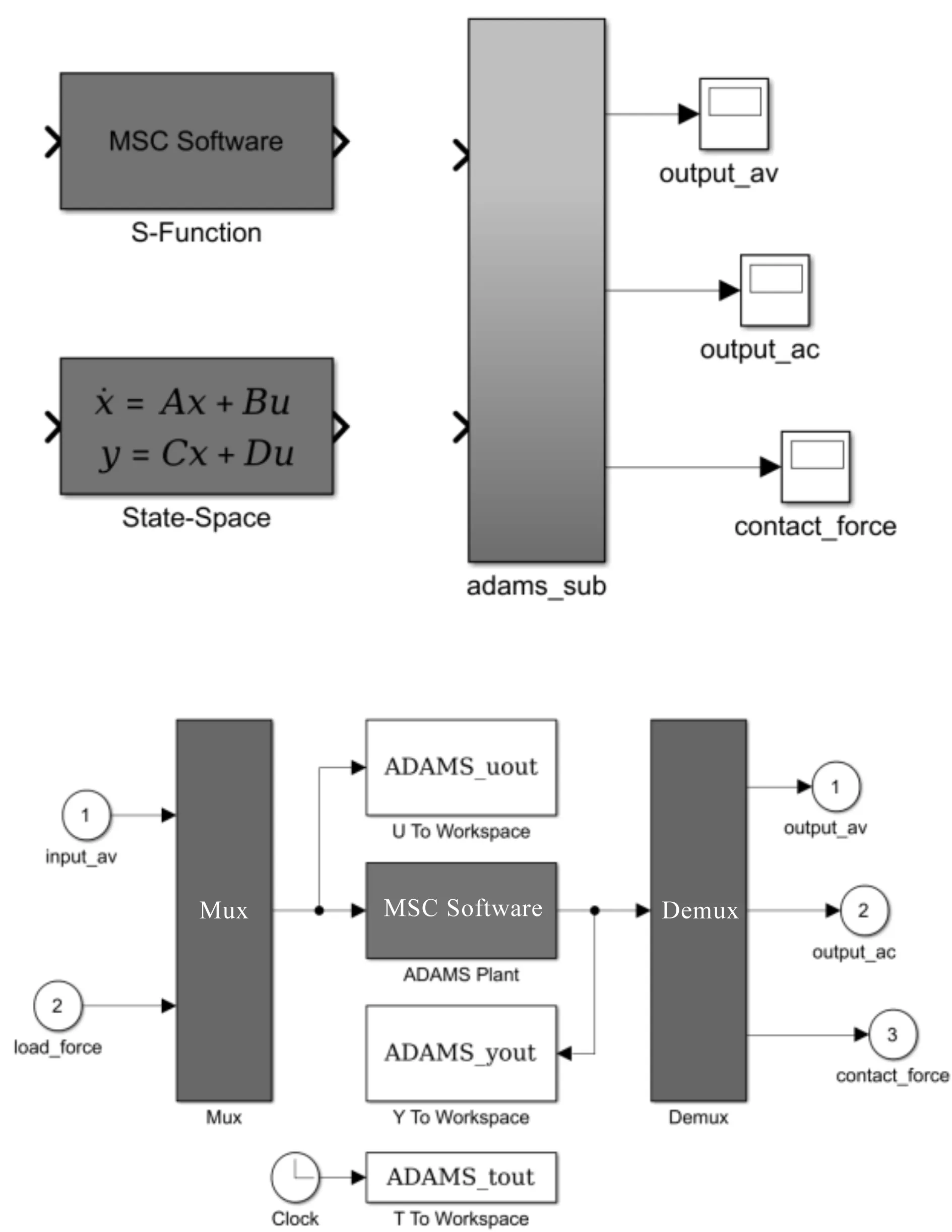
圖9 Adams sub模塊
筆者在A(yíng)DAMS Plant模塊中,設(shè)置Animation mode(動(dòng)畫(huà)模式)為interactive,即可看到仿真時(shí)相應(yīng)ADAMS機(jī)構(gòu)運(yùn)動(dòng)的動(dòng)畫(huà);Simulation mode(仿真模式)設(shè)置為continuous(連續(xù));ADAMS和MATLAB每次信息交換傳遞的時(shí)間設(shè)定為0.01 s,便于快速、準(zhǔn)確地進(jìn)行數(shù)據(jù)傳遞。
3 仿真結(jié)果分析
3.1 僅有恒值輸入的情況
當(dāng)只提供一個(gè)恒值信號(hào)時(shí),聯(lián)合仿真系統(tǒng)框圖如圖10所示。
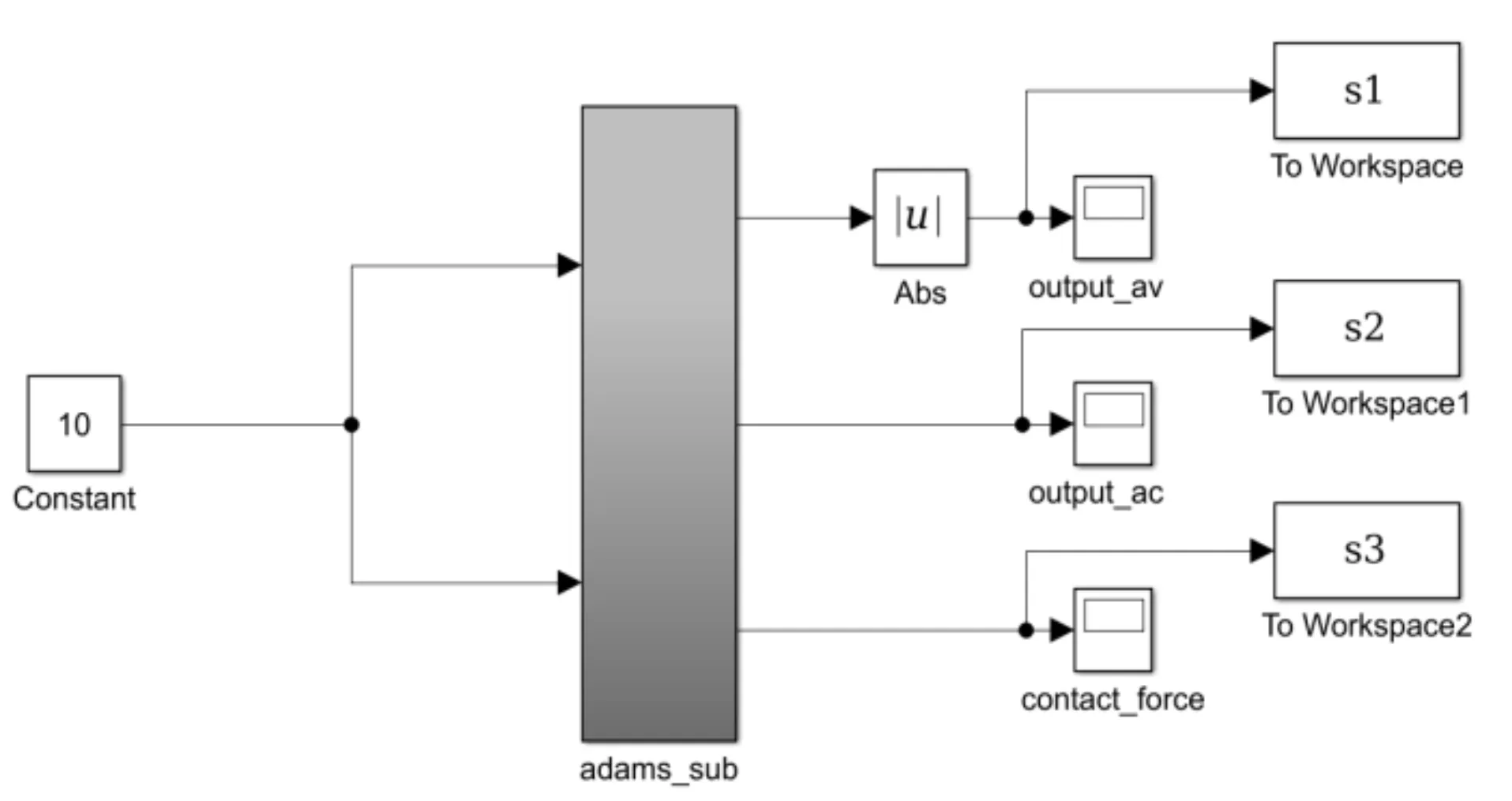
圖10 聯(lián)合仿真系統(tǒng)框圖
從動(dòng)輪的角速度仿真結(jié)果如圖11所示。

圖11 從動(dòng)輪角速度曲線(xiàn)
從圖11中可看出:當(dāng)主動(dòng)輪以某一角速度勻速轉(zhuǎn)動(dòng)時(shí),從動(dòng)輪以余弦函數(shù)的形式呈周期性轉(zhuǎn)動(dòng);且與理論分析出的曲線(xiàn)運(yùn)動(dòng)相比,運(yùn)用ADAMS和MATLAB聯(lián)合仿真得到的從動(dòng)輪運(yùn)動(dòng)曲線(xiàn)趨勢(shì)大體一致。該結(jié)果驗(yàn)證了聯(lián)合仿真的可行性、有效性;
而兩曲線(xiàn)運(yùn)動(dòng)的頻率略有差別,主要是因?yàn)辇X輪建模過(guò)程中的設(shè)計(jì)計(jì)算存在誤差,且裝配時(shí)兩個(gè)嚙合的齒之間存在一定間隙,使得兩曲線(xiàn)不能完全重合。
對(duì)非圓錐齒輪傳動(dòng)進(jìn)行分析、優(yōu)化時(shí),可忽略該誤差的影響。
從動(dòng)輪角加速度曲線(xiàn)如圖12所示。

圖12 從動(dòng)輪角加速度曲線(xiàn)
從圖12可以看出:在嚙合過(guò)程中,非圓錐齒輪角加速度曲線(xiàn)是周期性不斷變化的,當(dāng)主動(dòng)輪輸入轉(zhuǎn)速為10°/s時(shí),從動(dòng)輪角加速度可高達(dá)5000°/s2;再結(jié)合圖9中從動(dòng)輪角速度曲線(xiàn)的上下波動(dòng),說(shuō)明在傳動(dòng)過(guò)程中存在著不小的振動(dòng)和沖擊,這大大降低了非圓錐齒輪運(yùn)動(dòng)的平穩(wěn)性,縮短了使用壽命。
碰撞接觸力曲線(xiàn)如圖13所示。
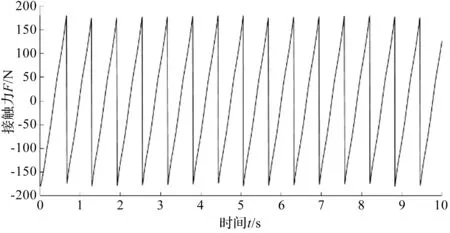
圖13 碰撞接觸力
圖13中,可以看到傳動(dòng)過(guò)程中,非圓錐齒輪兩個(gè)齒從進(jìn)入嚙合到脫開(kāi)的接觸力大小變化(正負(fù)號(hào)代表力的方向),最高碰撞接觸力約為175 N;當(dāng)一對(duì)齒脫離時(shí),便會(huì)有下一對(duì)齒進(jìn)入嚙合,如此循環(huán)往復(fù),從而使主動(dòng)輪帶著從動(dòng)輪連續(xù)轉(zhuǎn)動(dòng)。
該結(jié)果進(jìn)一步驗(yàn)證了聯(lián)合仿真的可行性和有效性。
3.2 PI控制模塊添加的情況
在連續(xù)系統(tǒng)中,PID是一種技術(shù)成熟、應(yīng)用廣泛的控制方式[28-30],其具有結(jié)構(gòu)簡(jiǎn)單、工作可靠、調(diào)整方便等優(yōu)點(diǎn),因而在工業(yè)中得到了廣泛應(yīng)用。
PID的控制規(guī)律為:
(8)
式中:e(t)—控制偏差;kp—比例系數(shù);Ti—積分時(shí)間常數(shù);Td—微分時(shí)間常數(shù)。
在PID控制中,比例環(huán)節(jié)可將控制系統(tǒng)的偏差信號(hào)按比例進(jìn)行放大或縮小;積分環(huán)節(jié)可消除靜差,使動(dòng)態(tài)響應(yīng)變得緩慢;微分環(huán)節(jié)可反映偏差信號(hào)變化趨勢(shì),并通過(guò)引入修正信號(hào)減少過(guò)渡過(guò)程的時(shí)間,降低超調(diào)量[31]。
其系統(tǒng)原理框圖如圖14所示。
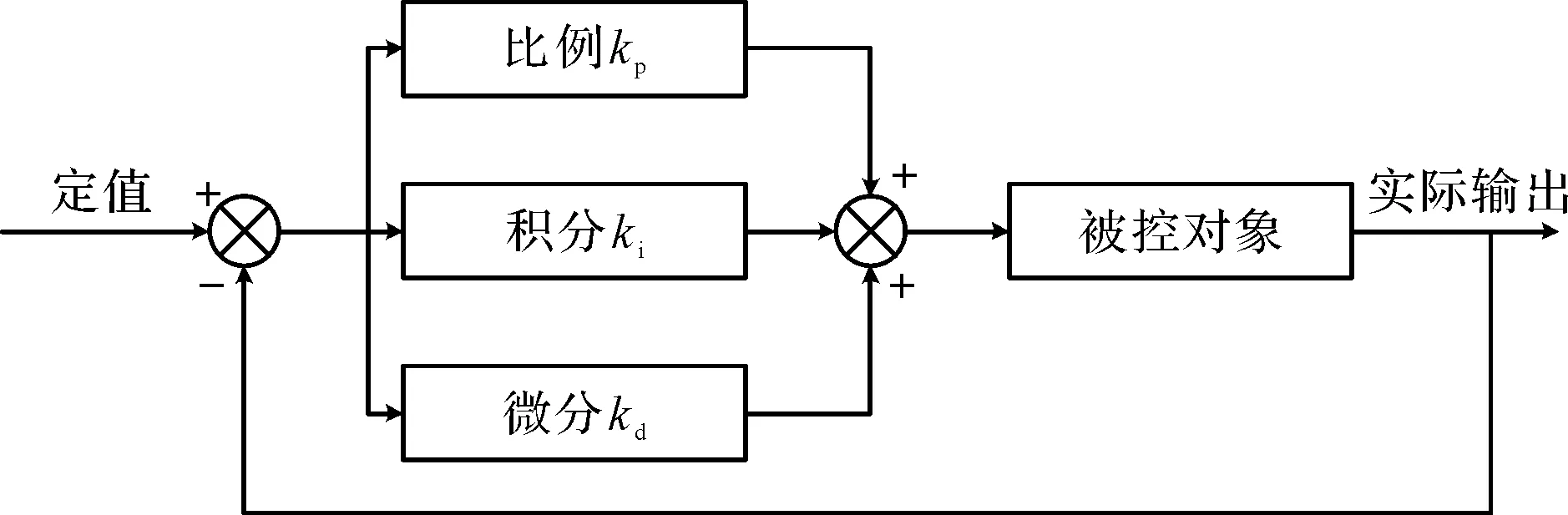
圖14 模擬PID控制系統(tǒng)原理框圖
由于非圓錐齒輪是變速比傳動(dòng),想要使傳動(dòng)過(guò)程運(yùn)行得更加平穩(wěn),實(shí)時(shí)控制調(diào)節(jié)主動(dòng)輪轉(zhuǎn)速是其中的一種方法。
筆者對(duì)非圓錐齒輪傳動(dòng)的主動(dòng)輪轉(zhuǎn)速進(jìn)行PI調(diào)節(jié)控制,其控制系統(tǒng)框圖如圖15所示。
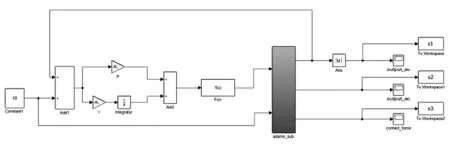
圖15 聯(lián)合仿真非圓錐齒輪傳動(dòng)控制系統(tǒng)結(jié)構(gòu)圖
通過(guò)調(diào)整比例系數(shù)kp和積分系數(shù)ki[32],筆者得到了控制后的從動(dòng)輪角速度如圖16所示。
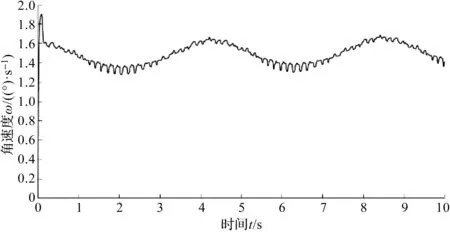
圖16 控制后從動(dòng)輪角速度曲線(xiàn)
從圖16中可看出:在添加PI控制后,從動(dòng)輪的運(yùn)動(dòng)趨勢(shì)沒(méi)有發(fā)生改變,仍是按余弦函數(shù)的形式周期性轉(zhuǎn)動(dòng);但與圖11相比,從動(dòng)輪角速度曲線(xiàn)的上下波動(dòng)幅值明顯減小,周期明顯增大,由周期和頻率呈反比例關(guān)系可知,其頻率減小。
角加速度曲線(xiàn)如圖17所示。
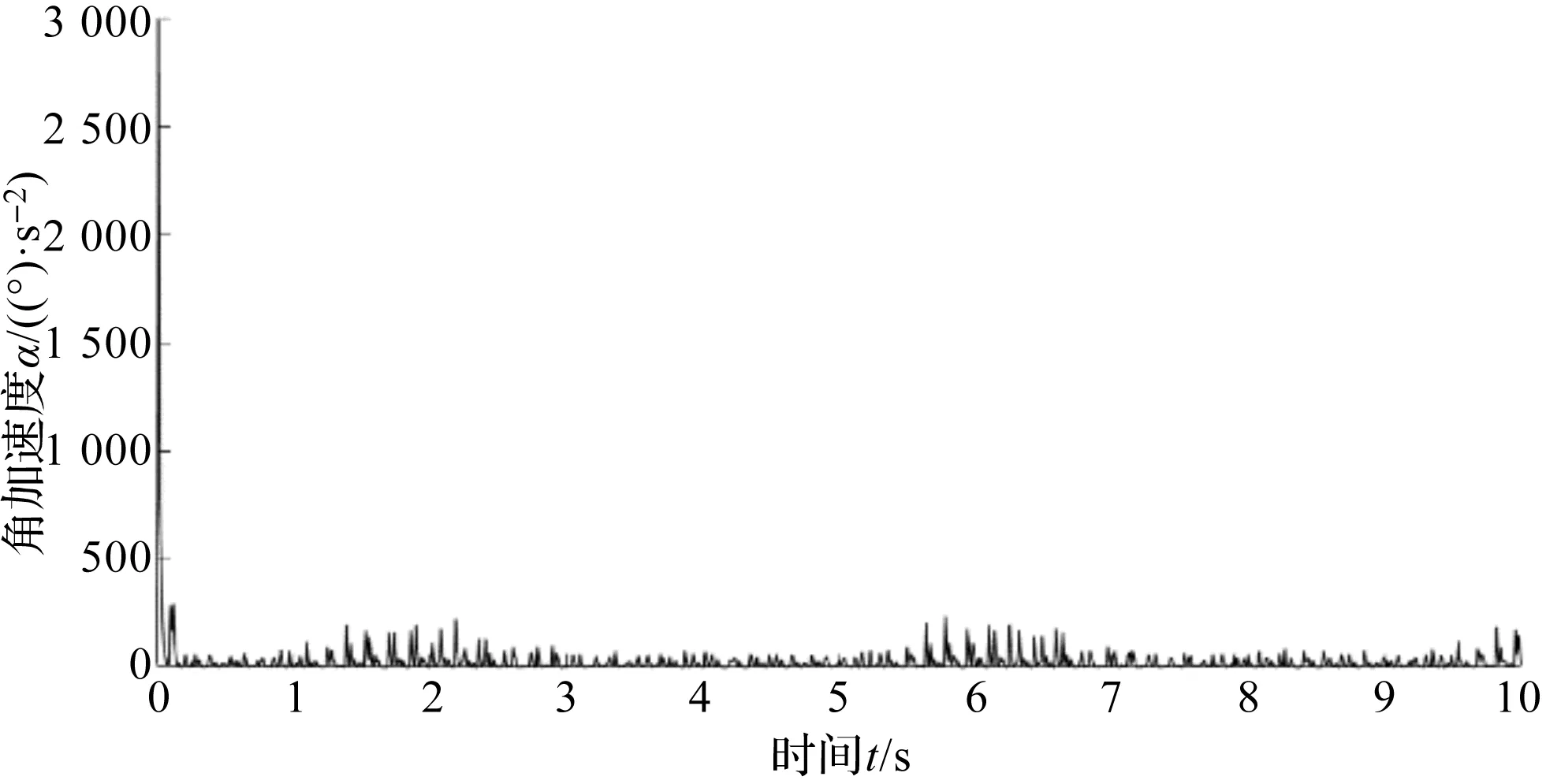
圖17 控制后從動(dòng)輪角加速度曲線(xiàn)
與圖12相比,圖17中的角加速度曲線(xiàn)的波動(dòng)范圍和頻率都明顯減小,即非圓錐齒輪在嚙合傳遞中的振動(dòng)、沖擊減小,運(yùn)行更加平穩(wěn)。該結(jié)果說(shuō)明,該控制方案具有可行性,為非圓錐齒輪傳動(dòng)的進(jìn)一步設(shè)計(jì)和優(yōu)化提供了一種新的方法,有利于非圓錐齒輪的應(yīng)用和推廣。
4 結(jié)束語(yǔ)
非圓錐齒輪機(jī)構(gòu)是一種新型的傳動(dòng)機(jī)構(gòu),既能實(shí)現(xiàn)相交軸變速比傳動(dòng),也能進(jìn)行軸向進(jìn)給運(yùn)動(dòng),具有一定的發(fā)展?jié)摿Α?/p>
為了減小非圓錐齒輪機(jī)構(gòu)傳動(dòng)過(guò)程中存在的振動(dòng)和沖擊,筆者采用ADAMS和MATLAB聯(lián)合仿真的方法,控制非圓錐齒輪副中主動(dòng)輪的轉(zhuǎn)速,從而降低嚙合傳動(dòng)中的振動(dòng)和沖擊。
具體研究步驟和結(jié)論如下:
(1)運(yùn)用MATLAB和UG軟件相結(jié)合的方法,建立了非圓錐齒輪模型,分析了階數(shù)和偏心率對(duì)傳動(dòng)比的影響,并得出結(jié)論,即階數(shù)增大,傳動(dòng)比曲線(xiàn)周期減小;偏心率增大,傳動(dòng)比曲線(xiàn)上下波動(dòng)的幅值增大;
(2)將裝配好的模型導(dǎo)入到ADAMS中,構(gòu)建齒輪機(jī)構(gòu)動(dòng)力學(xué)虛擬樣機(jī)模型,并設(shè)定輸入和輸出;通過(guò)ADAMS/Control接口與MATLAB/Simulink進(jìn)行數(shù)據(jù)傳遞,搭建起了非圓錐齒輪傳動(dòng)聯(lián)合仿真系統(tǒng);
(3)通過(guò)對(duì)仿真結(jié)果進(jìn)行對(duì)比,結(jié)果表明,添加構(gòu)建的PI控制系統(tǒng),可以有效地降低非圓錐齒輪傳動(dòng)中存在的振動(dòng)和沖擊。該結(jié)果驗(yàn)證了該控制策略的正確性、可行性。
聯(lián)合仿真技術(shù)為非圓錐齒輪傳動(dòng)性能的分析和優(yōu)化提供了一種新途徑。在后續(xù)的研究工作中,筆者將對(duì)非圓錐齒輪傳動(dòng)平穩(wěn)性的聯(lián)合仿真控制算法做進(jìn)一步的研究。
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19