實現高速精密成形的電磁懸浮直線驅動新方式
2022-02-01 03:26:30梁錦濤盧亮王丁磊
鍛壓裝備與制造技術 2022年6期
關鍵詞:結構
梁錦濤,盧亮,王丁磊
(西安電子科技大學 機電工程學院,陜西 西安 710071)
為滿足成形工藝設備在精密性和高效率方面越來越高的要求,由永磁直線電機(Permanent Magnet Linear Motor,PMLM)直接驅動工件和模具的方式能克服傳統傳動機構產生的誤差和慣性[1]。本課題組一直致力于電磁直線驅動高速壓力機的設計理論和樣機試驗研究,并取得一定進展[2,3],定位精度可達到5 m,最高速度可達2m/s,最大加速度10m/s2,最大行程達500mm。然而傳統直線導軌滑塊的導向結構仍存在較大的摩擦阻力,限制了直線運動精度和動態響應速度的進一步提升。
無接觸的懸浮導向技術能消除滑動摩擦力,獲得超高的精度,且無噪聲、無磨損、無死區效應。已在集成電路光刻機、納米制造等高精度定位場合得到廣泛應用[4,5]。載荷較大的懸浮導向方式主要為氣浮和磁懸浮兩種,相比氣浮導向,磁懸浮支撐剛度更大、控制更靈活精確、適用范圍更廣,運行和維護費用更低。因此,引入無機械接觸的磁懸浮技術并與大行程直線電機驅動技術相結合,將是實現高速壓力機、微成形設備等高精尖應用場合的理想驅動方式。
本文首先探討了實現精密直線進給的電磁直線驅動方式,在此基礎上介紹磁懸浮運動平臺的基本類型和工作方式,并對國內外開發出的磁懸浮運動平臺進行分析比較。最后分析適用于精密成形的電磁懸浮直線驅動新方式。
1 電磁直線驅動方式
為了滿足塑性成形工藝在結構、精度(動態跟蹤和靜態定位)、動態響應(速度和加速度)、輸出力等方面越來越高的要求,應采用新型的直線驅動技術,取代傳統的電機+旋轉直線變換機構、液壓或氣壓等驅動源。以下分別對目前研究應用較為成熟的幾種新型直線驅動電機進行對比介紹。
1.1 永磁直線電機
目前常用的PMLM是在旋轉永磁同步電機的基礎上變換而來,理論上每種旋轉電機結構都有對應的直線形式。如分數槽集中繞組式PMLM[6]、橫向磁場PMLM[7]、開關磁通PMLM[8]等。作者已在之前文獻[1]中探討了PMLM直驅式機械壓力機等成形設備的結構方式,目前各類PMLM驅動技術已日趨成熟并得到廣泛應用,此處不再贅述。
1.2 超聲直線電機
超聲直線電機(Ultrasonic Linear Motor,ULM)通過壓電材料的逆壓電效應而激發出彈性體的超聲振動,并在定子和動子之間產生摩擦耦合,由彈性體的微幅振動轉換為動子輸出直線運動[9]。壓電驅動使得直線位移定位精度可達納米級別,并且結構簡單成本較低,使其在精密定位中得到廣泛的應用[10,11]。但是,由于采用摩擦傳動,ULM驅動也有著非常明顯的缺陷,包括:材料磨損大,耐用性差;驅動行程較短,通常小于100m;驅動功率較低,難以超過100W;推力特性軟,控制難度較大等。
為了提高ULM的驅動范圍,可采用宏—微兩級結構,即采用PMLM實現大范圍驅動和粗定位,再由ULM進行精密定位。能實現毫米級長行程驅動,并且定位精度在納米級別,使其能應用在微機電系統、精密光學系統和納米加工等精度定位平臺[12,13]。但是,該方式會增加了系統結構和控制的復雜性,削弱系統動態響應速度。
1.3 音圈直線電機
音圈直線電機(Linear Voice Coil Motor,LVCM)基于安培力原理直接實現直線運動,具有圓筒型、平板型、矩型等結構[14]。其中筒型結構最具代表性,帶芯軸的圓筒內徑裝有環形永磁體產生徑向磁場,鐵磁芯軸上套裝有管狀線圈及其支撐套筒,線圈通電產生與電流大小等比例的軸向電磁力。LVCM 可設計為動圈式或動磁式;為了提高輸出力,可在芯軸上增加一套環形永磁體,實現雙層勵磁結構[15]。LVCM電磁力能達到1000N,行程可設計為幾微米至數百毫米范圍內,運動頻率可達到1kHz 及以上,定位精度可控制到5nm。在光刻機、掃描探針顯微鏡、微納加工等精密定位場合有著廣泛的應用[16,17]。如下表1 所示為國內外生產廠商制造的LVCM 系列產品參數。動音圈式LVCM隨著輸出力矩增大,損耗發熱量平方式遞增,熱變形容易導致定位精度大大下降。另外,隨著需求的行程增長,LVCM 的永磁體用量大大增加,并且結構靈活性降低。因此,難以同時實現大推力和大行程的驅動要求。
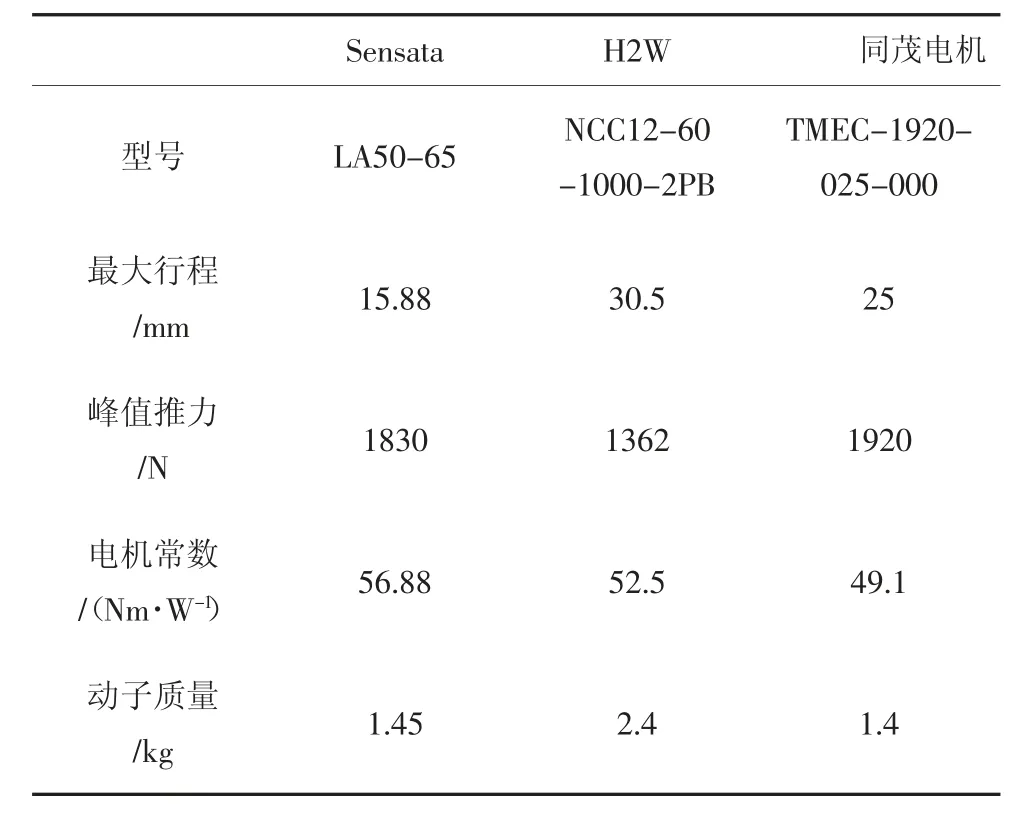
表1 LVCM 的國內外代表性產品
1.4 平面電機(Planar motor)
采用X-Y 雙軸直線電機的進給平臺難以消除層疊式結構帶來的阿貝誤差。可采用共平面結構,即平面電機(Planar motor),在工作臺上安裝數個電磁驅動單元實現二維平面甚至多自由度的運動。
與直線電機類似,根據電磁力產生原理將平面電機大致上可分為直流型、感應型、同步型和磁阻型等4 類。采用永磁勵磁性能更高,因此主流平面電機通常由永磁陣列、線圈陣列和支撐結構、定位檢測組件等組成[18]。根據永磁陣列和線圈陣列的結構形式可將平面電機劃分為一維陣列組合式,二維陣列對稱式和混合陣列式等。
典型的一維陣列組合式平面電機結構如圖1 所示,工作臺集成4 組相互垂直的一維PMLM[19]。兩組產生X 軸推力,兩組產生Y 軸推力,各自獨立控制XY 兩個方向運動,避免復雜的電磁耦合問題。但共平面結構限制了PMLM的電磁場范圍,使工作臺運動行程較小。
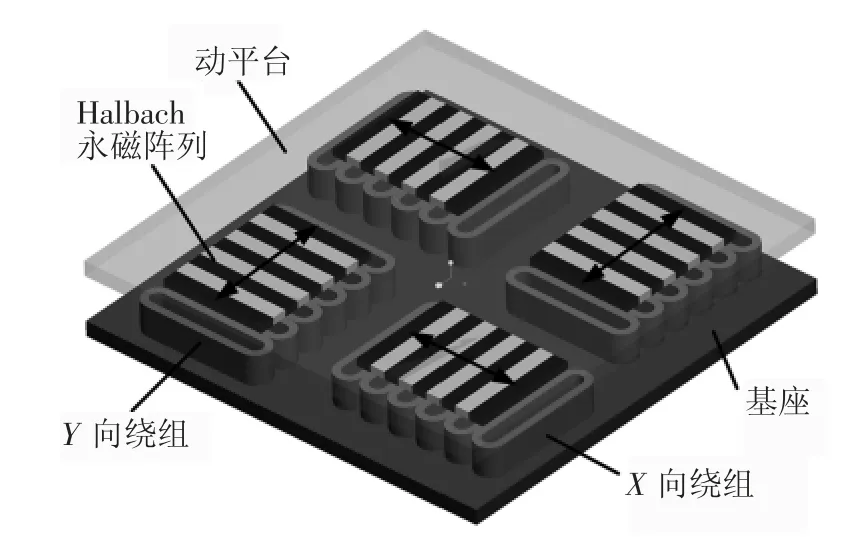
圖1 一維陣列組合式平面電機結構
二維陣列對稱式平面電機根據動子類型可分為動磁式和動圈式,如圖2 所示。勵磁永磁體可采用Halbach、Asakawa 等各類新型永磁陣列[20,21]。矩形線圈構成二維線圈陣列,利用復合電流驅動,可直接實現XY 二維平面運動。但由于需要同時控制各方向電磁力,電磁場耦合情況非常復雜,需要進行精確的解耦控制。
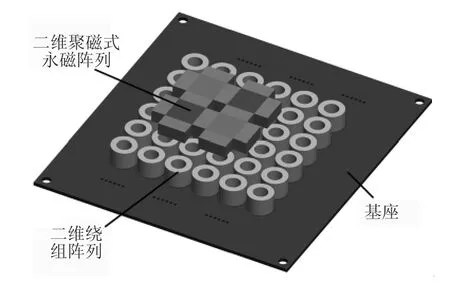
圖2 二維陣列組合式平面電機結構
混合陣列式復合了一維/二維的線圈和永磁體結構,形式種類多樣。例如荷蘭、韓國等多個學者提出的動圈式平面電機[22,23],由4 組相互垂直的一維線圈陣列作動子,二維永磁陣列作定子。如圖3 所示,該結構可避免復雜的耦合控制。國內清華大學朱煜教授團隊研制了一種有槽永磁動圈式PM[24],鐵心設計有X、Y 方向雙層槽,分別繞制三相同步電樞線圈,控制X、Y 方向推力和運動,能大大提高輸出推力密度和功率。日本東京大學的Ueda 提出了一種動磁式大范圍運動PM,其中X、Y 雙層定子電樞線圈直接印制在PCB 電路板上[25],結構緊湊,控制精度高。
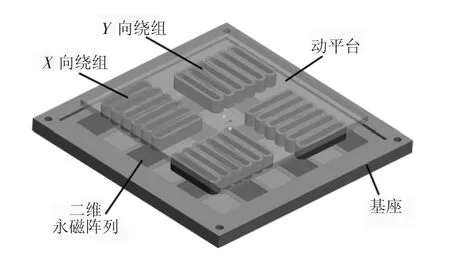
圖3 混合陣列式平面電機結構
為提高定位精度,上述平面電機可由氣浮軸承,靜壓軸承等支撐機構進行導向;也可以直接利用電磁單元陣列產生Z 軸向懸浮力實現磁懸浮。下面將結合磁懸浮原理及結構,對電磁懸浮的直線和平面驅動進行介紹。
2 磁懸浮驅動原理與結構
2.1 磁懸浮工作原理
磁懸浮是通過勵磁磁場和電樞電流之間相互作用產生的電磁力抵消被控對象的重力而懸浮空中的一種技術,根據不同的工作原理,磁懸浮可分為電磁鐵吸力懸浮(Electromagnetic Suspension,EMS)、電動型斥力懸浮(Electrodynamics suspension,EDS)、永磁相斥懸浮(Permanent Repulsive Suspension,PRS)和高溫超導磁懸浮(High-Temperature Superconducting Magnetic Levitation,HTS-Maglev)等。
其中EMS 最為常見,通常由電磁鐵和導磁材料組成。對電磁鐵通入電流后,電磁鐵與導磁材料之間產生電磁吸力,控制通電電流可調節電磁吸力大小使其與重力平衡而懸浮[26]。PRS 則較為簡單,由永磁體之間同性相斥異性相吸原則實現懸浮。但由于永磁體磁場不可控,可增加勵磁繞組對磁場進行調節[27]。EDS 利用短路繞組與永磁體或勵磁繞組之間的相對運動,在短路繞組內產生的渦流感應磁場與勵磁磁場方向相反,從此產生電磁斥力來實現懸浮[28]。斥力大小與磁感應強度及導體切割磁力線的速度有關,通過控制相關電磁參數可調節懸浮斥力。HTS-Maglev 根據超導體的磁通釘扎特性及抗磁性,當HTS 處在超導態并置于磁場梯度內時,HTS 表面會產生感應電流。與EDS 相似,在HTS 和勵磁體之間產生懸浮斥力。由于HTS 電阻為0,故產生的感應電流會一直存在且穩定,但HTS-Maglev 需要配備一套昂貴的超導低溫系統。目前關于HTS-Maglev 的研究主要聚焦在磁懸浮列車、電磁發射系統等領域[29,30]。
2.2 磁懸浮直線驅動結構
上述磁懸浮類型均可結合直線電機實現大行程無摩擦直線進給運動,結構形式包括磁懸浮軸承式、懸浮導向平板式等。如圖4 所示為由一對桿磁懸浮軸承取代傳統直線導軌的PMLM,利用EDS 產生電磁斥力實現套筒對導桿的同軸懸浮。平板式結構除需提供縱向EMS 懸浮力,還需提供一對電磁鐵調節橫向導向力。如圖5 所示,EMS 磁懸浮列車均采用該結構方式[31]。另外,亦可直接由PMLM控制繞組的d軸電流產生縱向懸浮力。
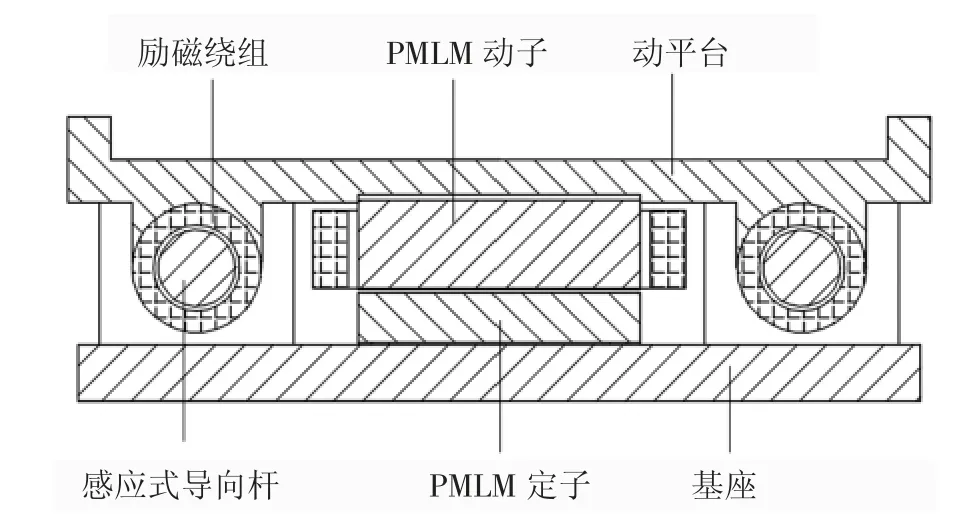
圖4 磁懸浮軸承式PMLM結構
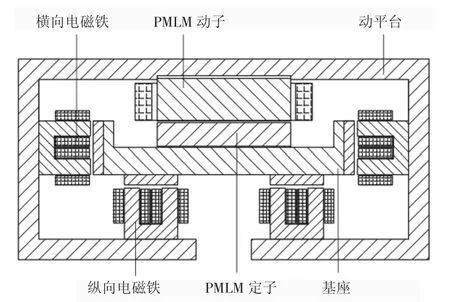
圖5 懸浮導向平板式PMLM結構
2.3 多自由度磁懸浮驅動結構
磁懸浮結合平面電機除能實現平面無接觸懸浮驅動外,靈活控制多個電磁模塊電磁力能實現空間6自由度(Degree of freedom,DOF)的懸浮驅動,即在直角坐標系Oxyz 下x、y、z 三個方向的平動,以及繞Sx、Sy、Sz三個軸的轉動θx、θy、θz。如圖6 所示的四個共平臺驅動的PMLM模塊。除實現的平面運動Sx、Sy、Sz外,四PMLM產生同方向z 軸電磁力可實現z向微動Sz,x,y 相同方向的兩PMLM產生相反方向z向電磁力,即可分別實現繞x、y 軸旋轉運動θx、θy。該模式可在單一平臺上進行多DOF 的超精密位移控制,且動態響應極快,但運動范圍相對較小。適合構建納米精度級別的微動工作平臺,如光刻機的定位平臺、掃描探針顯微鏡等。
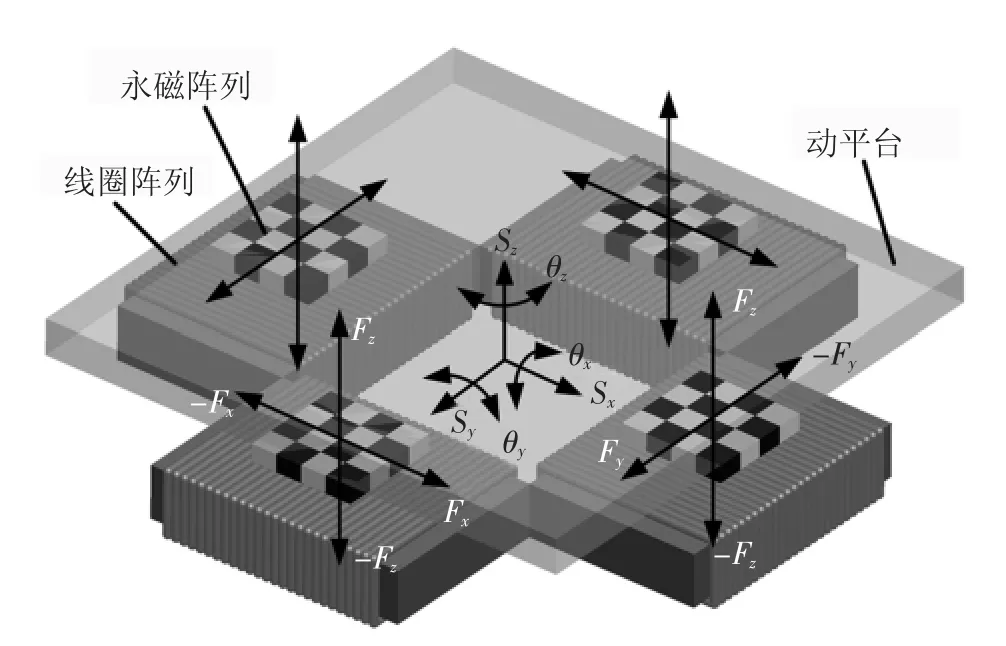
圖6 懸浮力耦合推力驅動多DOF 微動平臺
這種懸浮力及推力由同一模塊產生的驅動方式存在強烈的非線性電磁耦合,控制算法十分復雜。但結構簡單緊湊,加工裝配較為容易。另一種方式是懸浮力和推力分別由各自獨立模塊實現,如圖7 所示。PMLM只產生推力,懸浮力由電磁鐵產生。使其直接在機械結構上對懸浮力和推力進行解耦,控制方法較為簡單,不足之處在于組成結構復雜,加工精度要求較高,裝配較為困難。
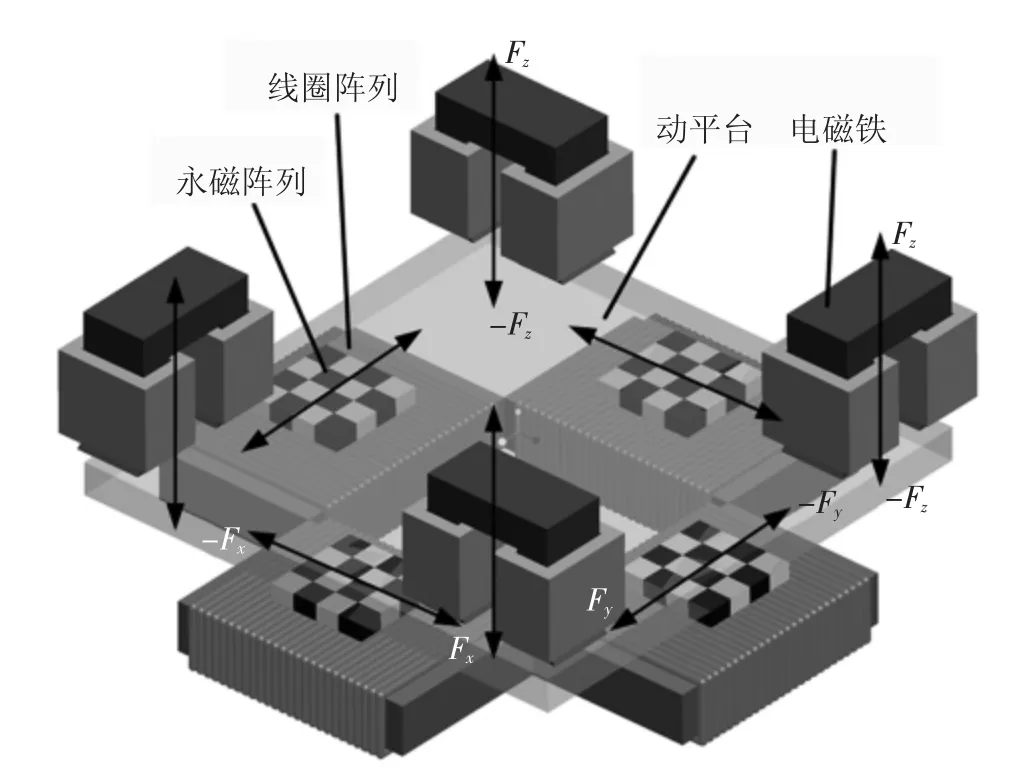
圖7 懸浮力獨立控制多DOF 微動平臺
3 電磁懸浮驅動的國內外研究
以下結合電磁懸浮直線驅動的國內外研究情況,分析其應用場合及優缺點。
20 世紀末,美國科研機構開始了集成電路光刻機的磁懸浮精密定位平臺的相關研究工作。1997年,麻省理工學院的Trumper 教授團隊研發了世界上第一臺6 DOF 高精度磁懸浮平臺[31]。工作臺由4 個直線電機模塊同步驅動,電機的Halbach 永磁陣列安裝在工作臺底部,對應的定子線圈安裝在永磁陣列下方的基座上。每個直線電機均能提供垂直懸浮力和水平方向(x 或y,由線圈繞線方向決定)的推力,使工作臺懸浮在基座定子上,實現用于晶圓定位的x-y平面50mm×50mm 位移,定位誤差在5nm(RMS)內,加速度可超過1g。通過4 電機相互配合還能實現其他自由度的微動用于光刻聚焦對準。
參考了Trumper 教授團隊的設計和理論,北卡羅來納大學夏洛特分校的精密測量中心在1999 年搭建了一套用于掃描探針顯微鏡的長行程掃描平臺(Long-range scanning stage,LORS)[32]。同樣采用4個懸浮直線電機實現6-DOF 運動,25mm×25mm×0.1mm 的移動范圍,定位精度在10nm 以內。2007年,該中心聯合加州大學洛杉磯分校等多所高校研制了用于納米加工制造的新一代磁懸浮平臺-多尺度對準定位系統(Multi Scale Alignment &Positioning System,MAPS)[33]。
俄亥俄州立大學的Menq 教授團隊也先后研制了多臺6-DOF 磁懸浮平臺(Magnetic Suspension Stage,MSS),第一臺采用10 個電磁致動器對懸浮動子進行控制,其中4 個用于垂直致動,6 個用于水平致動[34]。其動子移動范圍為3.0×3.0×1.8mm3,位置跟蹤誤差在±10 nm 內。在此基礎上進行改進,采用4 個直流直線電機提升水平驅動性能,定位跟蹤誤差縮小至±5nm 內[35]。新一代的微型6 軸磁懸浮平臺(magnetic levitation stage,MLS)采用洛倫茲力原理[36],只有CD 唱片大小,重量僅350g。采用3 個微型雙軸直線致動器實現動平臺的懸浮和驅動,上平移動范圍為2×2×2mm,轉動范圍為4° ×4° ×4°,定位精度高,x、y、z 誤差分別為1.1nm(RMS)、0.74 nm(RMS)4.4 nm(RMS)。
Trumper 教授團隊的Kim 博士畢業后在德克薩斯農工大學研制了多套納米級高精度微定位平臺。第一代為Δ 型平臺,Δ 型動平臺的三個邊分別由3 個致動器用于水平向運動;Δ 型動平臺的底部由3 個致動器用于垂直向運動[37]。x-y-z 平移范圍300mm,各軸轉動角范圍3.5mrad,定位精度高于5±2nm。每個致動器的動子只有磁鋼,定子無鐵心,平臺結構簡單緊湊。其后設計了第二代Y 型平臺,其與Δ型動平臺類似,由6 個致動器實現6DOF 驅動,但其水平移動范圍可擴展到5mm×5mm[38]。
此外,德國、荷蘭、日本、新加坡等發達國家科研機構均有磁懸浮電磁驅動平臺的相關研究和樣機實驗[39-41]。
國內對磁懸浮驅動技術的研究起步于21 世紀初。西安交通大學的李黎川教授采用一對三磁極電磁鐵控制工作臺的3 個自由度(z,θx,θy),另外3個自由度(x,y,θz)由平面電機控制[42]。梅雪松教授團隊先后研究了多個懸浮與驅動相互獨立的精密定位平臺[43,44],其中一種的定子由12 個空心線圈組成懸浮繞組,在懸浮繞組中心有4 個相互垂直的推力繞組,對應由36 塊永磁體作動子;另一種結構懸浮和驅動均采用電磁吸力方式,在動子上方布置4個U 型電磁鐵實現動子懸浮;在動子水平四周布置8 個水平驅動線圈實現動子平動。浙江理工大學的陳本永教授團隊設計了一種磁懸浮運動平臺[45],通過四組永磁陣列和定子繞組模塊之間產生的電磁力作用下,運動平臺實現6 個自由度(x,y,z,θx,θy,θz)的微運動。
中南大學的段吉安教授團隊研究了磁懸浮直線運動平臺[46],在懸浮體內對稱安裝六對電磁鐵實現差動式雙電磁力控制,使懸浮體穩定懸浮在定子基座上,直線電機驅動懸浮體沿基座方向進給,實現高精度無接觸式直線驅動。在X 軸的基礎上可疊加一套相同系統,形成X-Y 雙軸運動平臺[47]。
沈陽工業大學的藍益鵬副教授提出了一種雙繞組動圈式磁懸浮PMLM[48]。設計初級動子槽上有兩套獨立繞組,推力繞組輸出電磁推力,懸浮繞組產生磁懸浮力,無需額外增加懸浮作用模塊。隨后又提出了一種可控勵磁磁懸浮PMLM[49],把磁懸浮PMLM中定子的永磁勵磁替換為電勵磁繞組,勵磁繞組同時產生懸浮力,而推力繞組仍設置在次級動子上產生電磁推力。
北京理工大學研發了一種新型磁懸浮二維定位平臺[50,51]。兩組Halbach 永磁陣列和平面線圈布置在移動平臺上側面的X 軸方向;另兩組布置在平臺下側面的Y 軸方向,形成“雙層驅動+夾層結構”,實現平臺的6 自由度運動。
4 塑性成形的電磁懸浮直線驅動
綜上所述,電磁懸浮直線驅動各類成形裝備能突破傳統驅動方式的限制,實現高沖壓速度、微納級精度的塑性成形工藝。長行程大力矩的磁懸浮PMLM適合單自由度的沖頭或模具驅動,實現沖裁、拉深、鉚接、擠壓等工藝。但具體采用何種電磁驅動及懸浮結構,需要根據具體的成形工藝需求進行設計分析。
如圖8 所示為本課題組設計的一種電磁懸浮直線驅動沖頭結構。PMLM采用雙定子單動子結構,一方可以提高驅動力密度,另一方面雙邊法向吸力可以相互抵消,從而降低懸浮導向力。采用混合式磁懸浮結構,其中前后兩側通過PMLM的電樞繞組控制d 軸電流實現前后位置定位及導向;左右兩側通過獨立電磁鐵模塊控制左右位置定位及導向。模具直接安裝在動子上實現直線往復的沖壓工藝。

圖8 電磁懸浮直線驅動沖頭結構
如圖9 所示,采用X-Y 雙軸PMLM實現雙輥夾持漸進式旋壓成形工藝。但由于雙輥旋壓頭模具重量較大,并且X 軸的承重比Y 軸更大。若采用磁懸浮對PMLM導向,需要較大的懸浮電磁鐵結構尺寸。因此,可采用磁懸浮平面電機結構,通過共平面降低設備復雜程度。
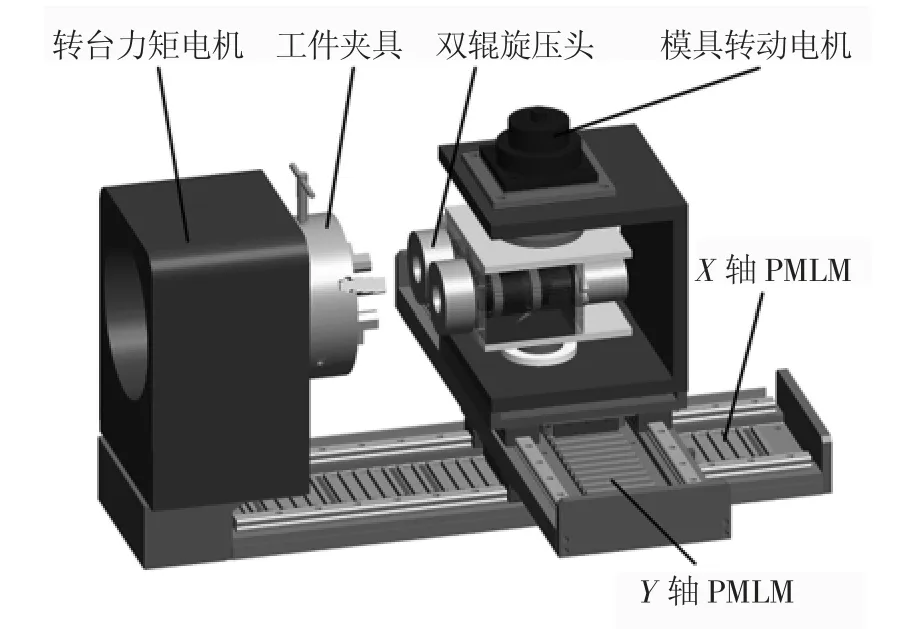
圖9 雙輥夾持旋壓成形設備直驅式結構
對于復雜的成形工藝,需要對工件和模具的多個自由度進行驅動,如圖10 所示為電磁直驅式實現輥軋、旋鍛、徑向鍛等復合成形設備。采用雙邊結構的磁懸浮PMLM對模具徑向進給,并結合直驅式旋轉力矩電機實現模具的旋轉—直線復合運動;采用四邊結構的磁懸浮PMLM實現工件軸向進給。

圖10 直驅式多自由度復合成形設備結構
相比磁懸浮直線模塊,多DOF 磁懸浮微動平臺行程較短,但精度更高,適合納米級精度的微成形工藝。本課題組將在后續工作中,研究用于微成形的電磁懸浮直線驅動理論。
5 結語
在直線驅動的基礎上配置磁懸浮提高成形驅動的動態速度和定位精度,滿足高速精密成形工藝需求。本文在介紹直線驅動和磁懸浮拓撲結構、工作原理、國內外研究現狀的基礎上,分析比較各種驅動結構的優缺點,并針對單自由度、雙自由度以及多自由度的成形工藝,提出電磁懸浮直線驅動的新方式。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50