新能源汽車節能規劃與控制技術研究綜述
2022-02-01 12:36:14孫逢春
汽車安全與節能學報 2022年4期
孫 超 ,劉 波,孫逢春
(1.北京理工大學 電動車輛國家工程研究中心,北京100081,中國;2.北京理工大學 深圳汽車研究院,深圳518118,中國)
中國《新能源汽車產業發展規劃(2021—2035 年)》中指出,發展新能源汽車是中國從汽車大國邁向汽車強國的必由之路。新能源汽車以電驅動為主要特征,是實現交通節能減排和能源結構優化的重要途徑,包括純電動汽車(battery electric vehicle,BEV)、插電式混合動力(含增程式)汽車(plug-in hybrid and rangeextended electric vehicle,PHEV)和燃料電池汽車(fuel cell vehicle,FCV)[1]等。2022 年上半年,中國新能源汽車銷量為260 萬輛,同比增長129.2%,在新車市場的占有率達到21.6%,銷量占全球總銷量的61.6%[2]。美國、日本、歐盟等世界主要發達國家和經濟體也在積極推進汽車電動化轉型,發展新能源汽車已成為國際共識。新能源汽車節能技術能夠有效增加車輛續航里程并降低使用成本,對新能源汽車的高質量發展和推廣應用具有重要意義。除了提高動力電池比能量、電機效率和輕量化水平等方式,綜合運用運動規劃、智能控制和車聯網等技術手段[3-4],進一步提升新能源汽車的節能效果,是當前研究的重要課題。
新能源汽車節能規劃與控制包括節能路徑規劃(eco-routing)、節能車速規劃(eco-driving)、節能充電規劃(eco-charging)和能量管理(energy management),其技術體系如圖1 所示。圍繞節能目標,新能源汽車首先根據路網拓撲和路段能耗進行導航路徑規劃;然后根據導航路徑上的全局行駛約束進行長期車速規劃,并根據局部動態環境進行短期車速規劃;之后根據目標工況計算整車功率需求,具有多個動力來源的新能源汽車還需通過能量管理實現不同動力部件之間的功率分配;最后通過動力系統和轉向系統控制實現整車運動;針對充電問題,新能源汽車可以在行駛或停車時根據剩余電量進行充電選址或充電行為規劃。此外,由于新能源汽車節能規劃與控制的不同任務之間可能存在耦合關系,如PHEV 的節能車速規劃還涉及動力系統的能量管理,通過多任務集成與協同優化提升整體節能效果也日益受到眾多研究者的關注。
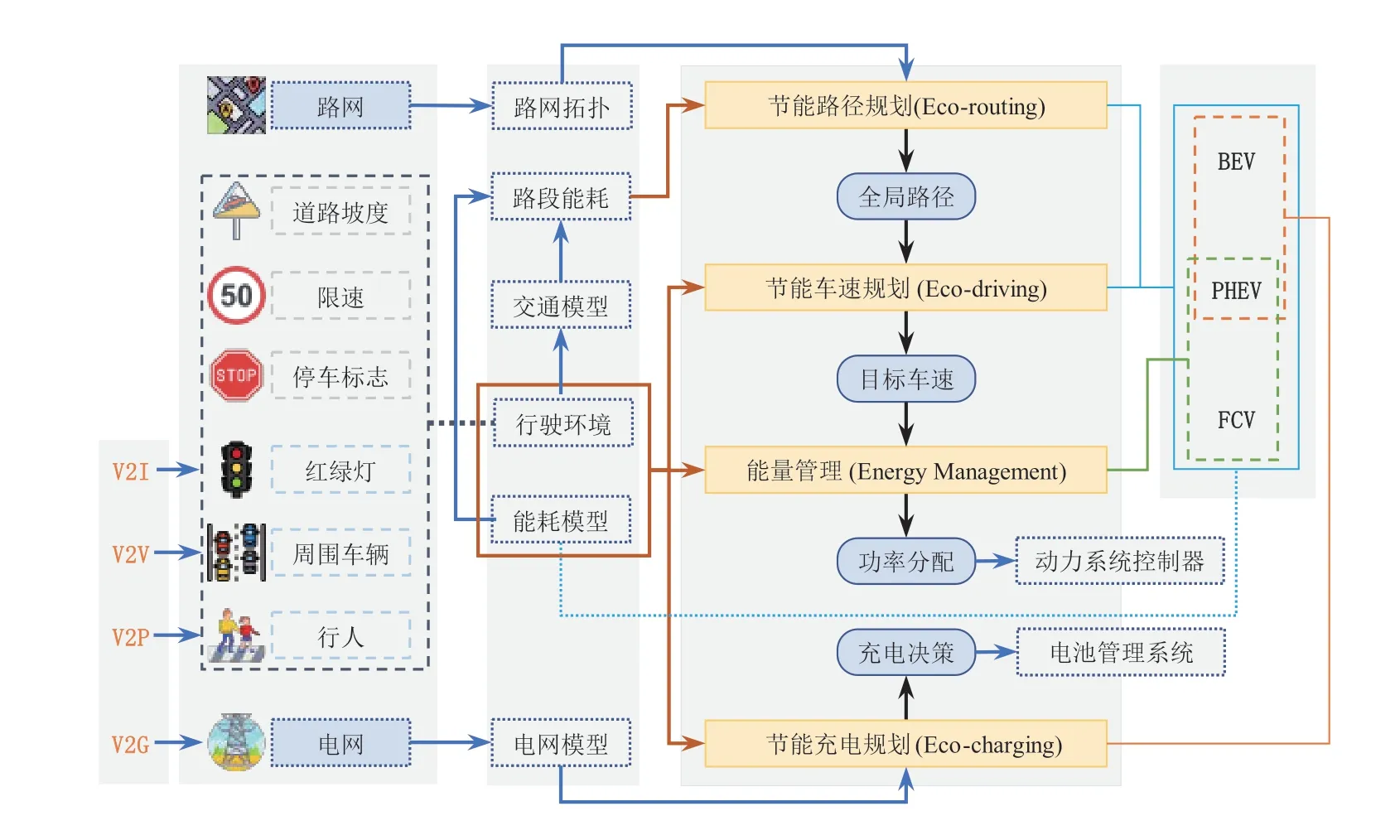
圖1 新能源汽車節能規劃與控制技術體系
當前,信息化和網聯化技術極大地增強了車輛的信息獲取能力[5],對新能源汽車節能規劃與控制技術的進步起到了重要推動作用。具備車聯網(vehicle-toeverything,V2X)通信能力的新能源汽車可通過車輛對基礎設施(vehicle-to-infrastructure,V2I)通信獲取信號燈和交通流狀態等信息,通過車輛對車輛(vehicle-tovehicle,V2V)通信和車輛對行人(vehicle-to-pedestrian,V2P)通信獲取周圍車輛和行人的運動狀態和意圖,從而進行更加精準的路徑規劃、車速規劃和能量管理。研究表明,網聯式汽車在高速場景下利用道路坡度和交通信息可節省3%~20%的能耗[6-7],在城市多交叉口場景下利用信號燈信息可節省10%~40%的能耗[8-9]。此外,車輛到電網(vehicle-to-grid,V2G)互動技術使新能源汽車成為電網中的可控充放電節點,在充電規劃中不僅可以實現削峰填谷、頻率調節和可再生能源的平穩集成,還能夠實現車輛和電網層面的能耗優化。
本文圍繞新能源汽車節能規劃與控制,對路徑規劃、車速規劃、充電規劃、能量管理和多任務集成優化技術的研究現狀進行綜述,并提出未來的發展趨勢。
1 節能路徑規劃
節能路徑規劃(eco-routing),即生態路由[10],是指基于路網信息,以車輛起止點之間能耗(或排放)最優為目標,在出行前或行程中規劃出滿足行車約束的行駛路線,從而實現節能減排的技術,相關研究如表1 匯總所示。在不同的路網拓撲和交通條件下,相比最短時間路徑,節能路徑往往能夠降低3%~15%的能耗,并可同步減少排放(如CO2、CO、HC 和NOx)高達20%左右[11-14]。使用多目標節能路徑規劃方法不僅能夠降低能耗和排放,還可以有效縮短行駛時間[15]。此外,傳統內燃機汽車(internal combustion engine vehicle,ICEV)的節能路徑規劃和車速規劃技術對新能源汽車具有借鑒意義,因此本文也將其作為研究對象進行討論。需要注意的是,新能源汽車動力系統更為復雜,對問題的建模和求解提出了更高的要求。本節充分調研了BEV 和ICEV 的節能路徑規劃研究進展。PHEV 和FCV 的節能路徑規劃與動力系統能量管理強耦合,因此在第5 節進行介紹。

表1 節能路徑規劃研究
1.1 問題描述
路網拓撲結構可以用加權的原始圖或伴隨圖表示,圖中每條邊的權重表示能耗高低。在原始圖中,節點和邊分別表示路口和路段。為了提高模型表征能力,伴隨圖將原始圖中的節點轉化為多個與車輛運動行為相關的邊,并將原始圖中的邊作為節點。節能路徑規劃問題可以描述為加權圖上的最短路徑問題,并進一步建模為二元整數規劃(integer programming,IP)問題。控制變量為選路決策,表示對每個路段的選擇與否。約束條件包括固定的到達時間[12]、隨機概率描述的到達時間[16]、動力電池荷電狀態(state of charge,SOC)或能量狀態(state of energy,SOE)以及CO2排放[17]等。Lagrange 松弛技術可以將約束放寬并作為Lagrange 項添加到目標函數中,從而將原約束優化問題轉化為無約束多目標優化問題。不同優化目標下的最優路徑之間存在一定的聯系。根據碳平衡關系,CO2排放最低路徑通常與油耗最低路徑相同,但與NOx排放最低路徑往往不同[18]。能耗最低路徑通常也能減少行駛距離[11],但可能會增加行駛時間[19]。
為實現節能目標,建立準確的路段能耗模型十分關鍵[20]。M.Kubi?ka 等[21]復現并比較了已有路徑規劃方法下的能耗最低路線、距離最短路線和速度最快路線,發現不準確的路段能耗模型可能導致錯誤的結論。路段能耗取決于車輛能耗特性、工況、天氣和道路坡度等。車輛能耗特性通常用微觀能耗模型表示,如針對ICEV 的CMEM[22]、VT-Micro[23]、VT-CPFM[24]等油耗/排放模型[25],針對BEV 的考慮再生制動效率的VT-CPEM[26]等電耗模型。一方面,路段能耗可以通過神經網絡(neural network,NN)或線性回歸等方式進行擬合[27]。比如,C.De Cauwer 等[28]以交通、天氣和道路信息作為NN 的輸入,預測正/負單位里程動能變化量和有效車速,然后將其和路段長度等信息輸入線性回歸模型,實現了BEV 路段電耗估計。另一方面,路段能耗可以用已有的微觀能耗模型表示,并且非常依賴車速和加速度等工況信息。早期的部分研究假設車輛在每個路段勻速行駛且相鄰路段間的速度可以跳變[29],通過工況簡化降低了問題復雜度,但是難以達到最優效果。為了體現速度的連續性,M.Y.Nie 和LI Qianfei[17]假設車輛在路段交界處以勻加減速模式行駛。在此基礎上,G.De Nunzio 等[13]提出的BEV 路段能耗模型還考慮了信號燈等交通基礎設施引起的加速度項,相比基于平均速度的能耗模型,降低了27%的能耗估計誤差。
1.2 方法分類
節能路徑規劃方法分為圖搜索算法、數學規劃算法和元啟發式算法。圖搜索算法在加權圖中搜索代價最小的路徑,具有多項式時間復雜度,適用于無約束最短路徑問題。針對有約束路徑規劃問題,數學規劃算法和元啟發式算法是常用的解決方案。數學規劃算法能夠獲得精確解,還可以解決隨機優化問題,但計算成本較高。元啟發式算法是一種獨立于具體問題的通用啟發式策略,通過權衡全局搜索和局部搜索,能夠在可接受的計算開銷下得到問題的近似解,具有良好的魯棒性、可擴展性和并行計算能力。
1.2.1 圖搜索算法
用于節能路徑規劃的圖搜索算法有Dijkstra、A*和Bellman-Ford 等算法。Dijkstra 采用貪心策略選取未被訪問的最小權值節點,然后對其臨邊進行松弛操作,求解速度快,但要求圖中無負權邊。因此,Dijkstra 常用于以最短距離或最短時間為目標的傳統路徑規劃和面向ICEV 的節能路徑規劃[18]。A*是Dijkstra 算法的擴展,采用啟發式函數估計下一節點到目標節點的代價。胡林等[30]提出了一種考慮信號燈的路徑規劃方法,將通過信號燈路口的交通流近似分為4 個階段,并結合信號燈信息和階段通行能耗,使用A*算法求解最優路徑。Bellman-Ford 算法需要對所有邊進行松弛操作,計算量高于Dijkstra。但是憑借適用于負權圖的獨特優勢,Bellman-Ford 算法在新能源汽車節能路徑規劃中得到了廣泛應用[13,31]。實車試驗表明,基于Bellman-Ford 算法的BEV 節能路徑規劃能夠增加12%的續航里程[32]。此外,為了使圖搜索算法能夠處理時間約束,K 則最短路徑算法基于圖搜索尋找代價最小的前K 條路經直至滿足約束[12],但計算量也因此顯著增加。
1.2.2 數學規劃算法
用于節能路徑規劃的數學規劃算法主要涉及整數規劃和凸優化方法。整數規劃問題是一類非線性非凸的NP 完全問題,計算復雜度較高,可以使用分支定界法、割平面法或相應的數值求解器進行求解。M.Y.Nie 和LI Qianfei[17]考慮CO2排放約束,使用求解器CPLEX 求解能耗和時間雙目標最優路徑規劃問題。為了降低計算難度,整數規劃問題可以在合適的條件下轉化為更易求解的凸問題。凸問題是定義在凸集中的凸函數最優化問題,其局部最小值必為全局最小值,因此在計算效率上具有顯著優勢。SUN Jie 和X.H.Liu[33]基于Markov 決策過程建立單一目標最優的隨機節能路徑規劃問題,并將其轉化為有約束的線性規劃(linear programming,LP)問題,最后采用標準方法求解。假設路段能耗符合正態分布,YI Zonggen 和H.P.Bauer[34]提出了一種隨機能耗感知的節能路徑規劃框架,通過凸松弛和變換將原問題轉化為二階錐規劃(second-order cone programming,SOCP)問題,并采用內點法(interior point method,IPM)得到了最優解。
1.2.3 元啟發式算法
用于節能路徑規劃的元啟發式算法包括遺傳算法(genetic algorithm,GA)、粒子群算法(particle swarm optimization,PSO)和蟻群算法(ant colony optimization,ACO)等,其中GA 和PSO 算法流程對比如圖2 所示。元啟發式算法能夠在較短時間內獲得問題的近似解,能夠用于大規模路網的節能路徑優化問題。R.Abousleiman 和O.Rawashdeh[35]考慮動力電池SOC 約束,首次使用PSO 算法解決BEV 節能路徑規劃問題,結果相比谷歌地圖和MapQuest 節能9.2%以上,相比Bellman-Ford 算法大幅提升了計算效率。M.Richter 等[36]在城市交通場景下使用ACO 算法對不同車型的節能路徑規劃問題進行了研究。結果表明,與距離最短路徑相比,ICEV 和BEV 的節能路徑分別能夠降低2.8%和8.5%的能量消耗。
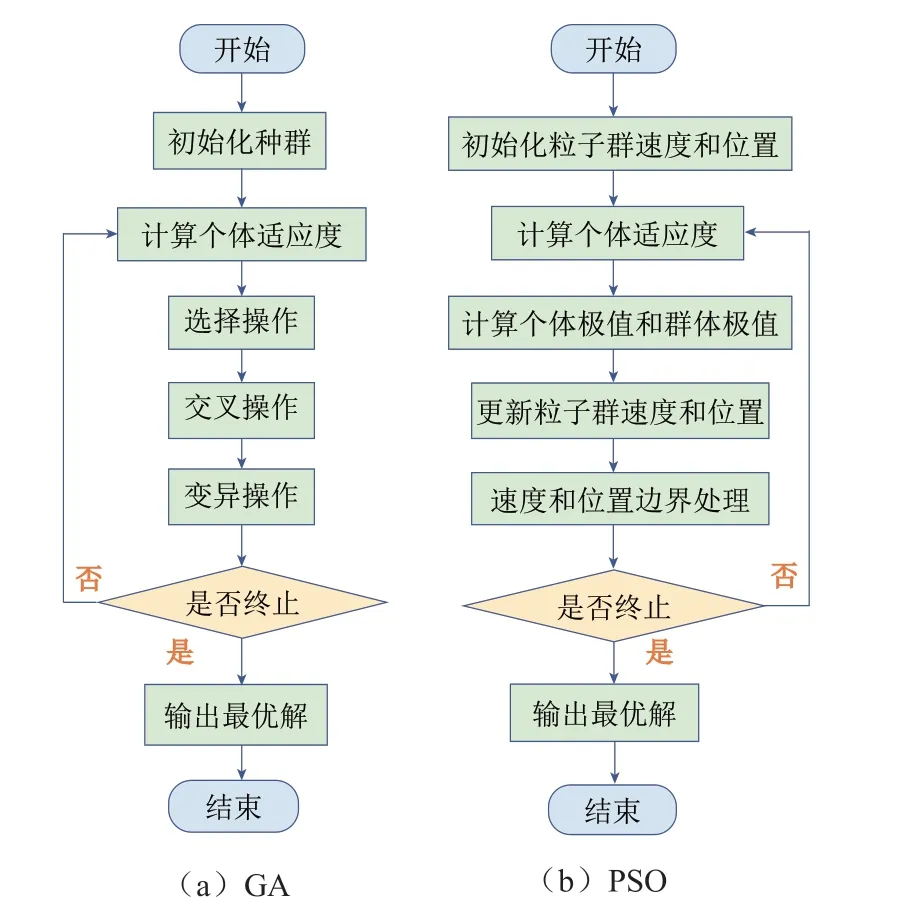
圖2 GA 和PSO 算法流程對比
2 節能車速規劃
節能車速規劃(eco-driving),即生態駕駛[37],是指在行駛環境和車輛動力系統約束下[38],規劃出能耗最優車速軌跡的技術,相關研究如表2 匯總所示。
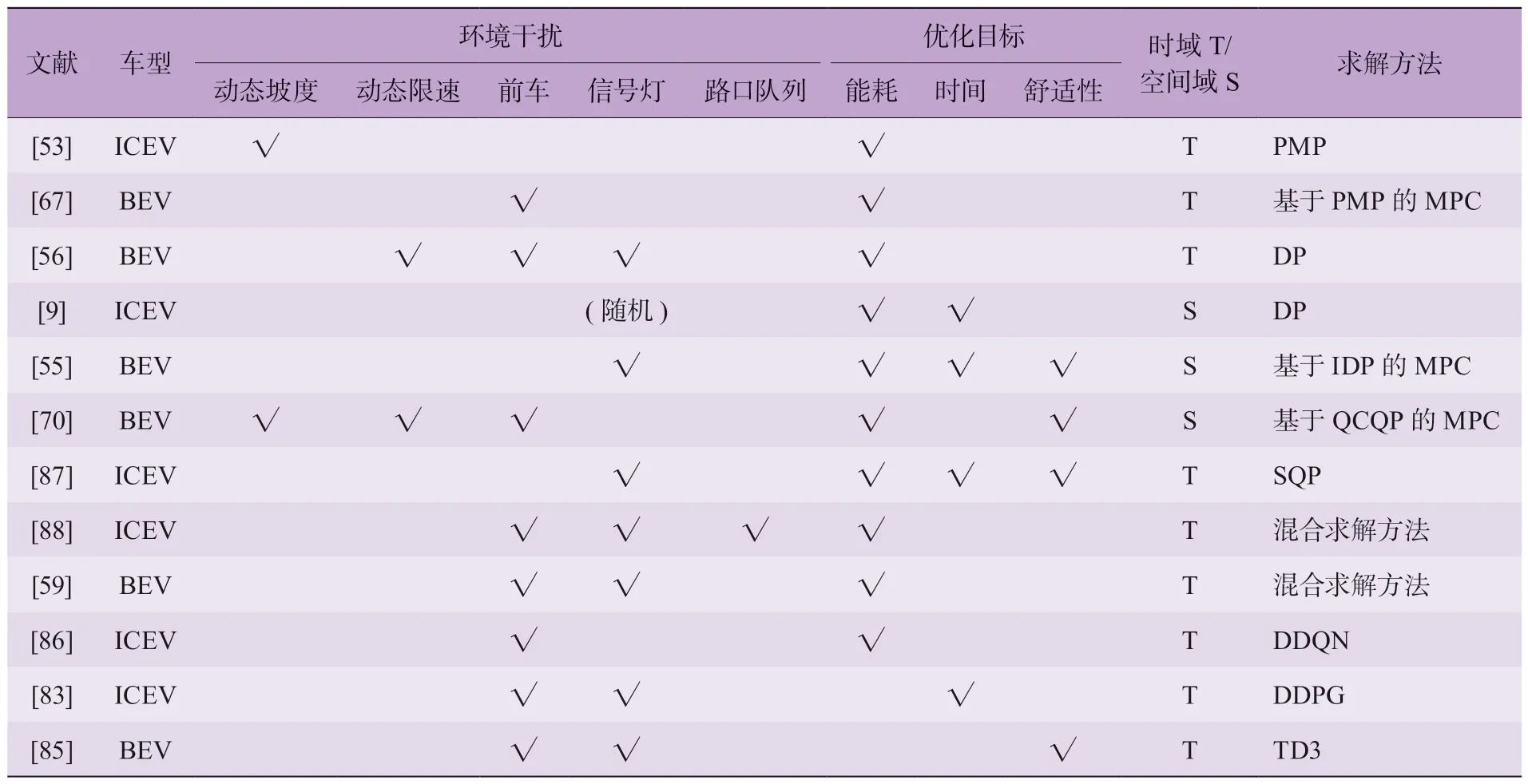
表2 節能車速規劃研究
規劃得到的最優車速可以通過人機交互界面顯示給人類駕駛員,也可以直接輸出給車速跟蹤控制器。研究表明,在不同的交通條件下,生態駕駛往往可以降低10%~30%的能耗和20%~30%的排放[37]。典型的應用場景如車輛借助V2I 通信獲取前方信號燈的相位和配時(signal phase and timing,SPaT)信息,通過及時調整車速實現在綠燈窗口平穩通行,從而減少頻繁加減速行為和能量損失。隨著市場滲透率的增加,網聯式汽車可以從以個體為中心的路權競爭轉向注重車群整體利益的相互合作,通過信息共享和協同控制進一步提升節能效果[39]。在交通層面,節能車速規劃還能夠抑制交通流震蕩,緩解城市道路交通擁堵。本節主要針對BEV 和ICEV 的節能車速規劃問題和方法進行分析研究。
2.1 問題描述
車輛的行駛場景分為城市和高速,可以細化為跟車、匝道合流和路口通行等,如圖3 所示。環境干擾包括道路坡度[40]、限速、前車和信號燈等,可以構成跟車無碰撞和不違反交通規則等約束。在跟車場景中,自車可以通過自適應巡航控制(adaptive cruise control,ACC)系統實現。為了提高節能效果,ACC 還能夠借助V2V 通信或預測技術獲取前車速度和道路坡度[41]等信息,從而提前對自車速度進行適應性調整[42]。在匝道合流場景中,主路和匝道上的車輛首先在控制區域調整車速,然后在合流區域完成匯入。不同于單車道的情況,多車道主路或匝道上的車輛首先需要進行換道決策,然后進行縱向車速優化[43]。
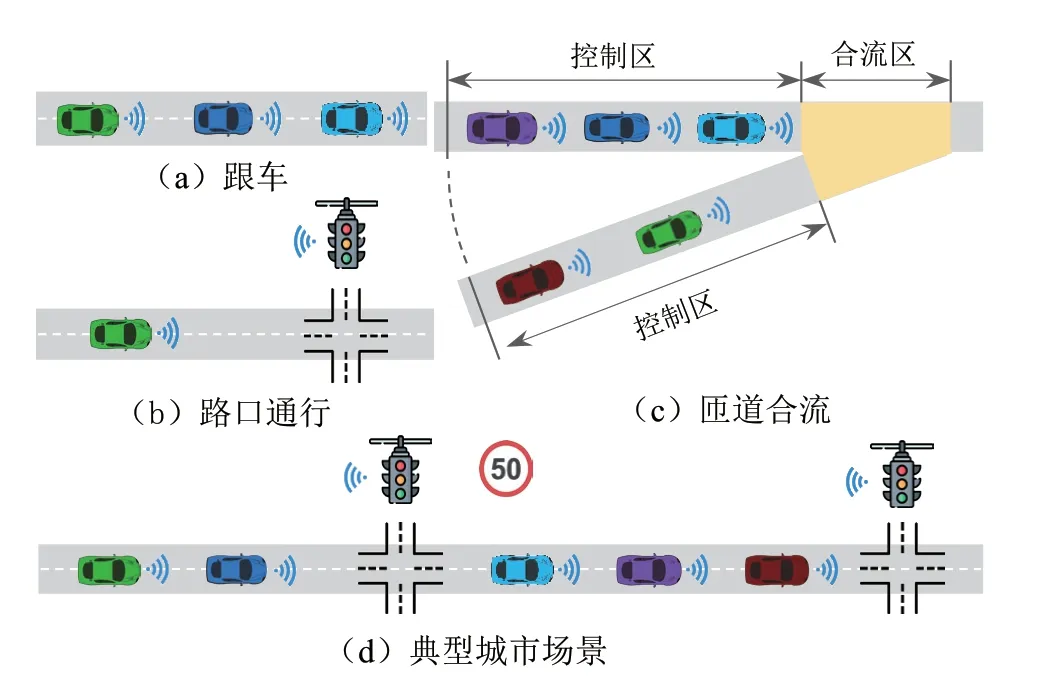
圖3 節能車速規劃場景示意
在信號燈路口通行場景中,時空不連續的信號燈約束增加了問題復雜度,相應的節能車速規劃方法也叫做節能接近和駛離策略[44]或綠燈最優速度建議[45]等。基于V2I 通信,多燈感知利用行駛路線前方多個路口信號燈的位置和SPaT 信息進行車速規劃,能夠實現比單燈感知更好的節能效果[46-47]。在多數研究中,信號燈SPaT 被視為確定性變量,但實際上可能受到隨機因素的影響。為了描述信號燈的不確定性,歷史定時數據被用于獲取有效紅燈持續時間的概率分布[9],并結合實時相位數據進行綠燈概率預測[48]。此外,信號燈路口等待隊列也會對車輛行駛造成影響,可以基于交通流預測集成到擴展的信號燈模型中[49-50]。
節能車速規劃問題的優化指標主要為能耗,還包括行駛時間和舒適性等。根據能量傳遞路徑的不同,車輛能耗分為輪端能耗和動力系統能耗。使用輪端能耗忽略了動力傳動系統的功率損失,能夠簡化問題但同時會降低結果的最優性。除了發動機MAP、VT-Micro和VT-CPEM 等模型,車輛能耗還可以表示為車速和加速度[51]、車速和電機轉矩[52]以及車速和發動機轉矩[53]的多項式函數。無環境約束的車速優化結果表明,以輪端能耗為優化目標時,節能的關鍵是降低風阻,要求車輛在較低的恒定速度行駛;以簡化的動力系統能耗為優化目標時,ICEV 的最優模式為加速-滑行,BEV的最優車速為時間的拋物線函數[54]。此外,少數研究還在優化目標中考慮了動力電池的容量衰退[55]。
節能車速規劃問題可以在時域或空間域進行描述。時域狀態量一般為行駛距離和車速,空間域狀態量一般為行駛時間和車速。引入Boolean 狀態還可以限制部件功率或轉矩變動,進而提高舒適性[56]或部件壽命。控制量一般為加速度,可以延伸到力或轉矩,并分為驅動和制動模式,比如輪端的驅動加速度和制動減速度[57]、ICEV 的發動機轉矩和機械制動力/力矩[58]、BEV 的電機轉矩[59]等。傳動系統的擋位可以假設為恒定[60]或由給定規則[61]確定,也可以作為控制變量進行優化[62]。
節能車速規劃問題的控制對象分為單車和多車,對應單車生態駕駛和協同生態駕駛[63],后者可以由集中式或分布式控制實現。協同生態駕駛的典型應用場景包括跟車協同控制和匝道合流協同控制[64]等。在節能跟車場景中,車輛編隊控制或協同自適應巡航控制(cooperative adaptive cruise control,CACC)基 于V2V信息共享,能夠在滿足碰撞安全和隊列穩定性的同時降低車隊的整體能耗。CACC 還可以考慮其他干擾因素,擴展到信號燈路口通行等場景[65]。在效果驗證方面,現有研究大多使用仿真軟件,少數進行了實車實驗[55,61,66]。
2.2 方法分類
節能車速規劃方法包括解析優化方法、數值優化方法、混合求解方法和強化學習方法。解析優化方法基于Pontryagin極小值原理(Pontryagin’s minimum principle,PMP)獲得最優控制的必要條件,并進一步推導出解析解,計算效率高,實時性好,但是高度依賴理想假設,僅適用于相對簡單的行駛場景。數值優化方法將變量離散化,通過網格搜索或梯度下降等方式迭代獲得數值解,問題適用面廣,但是相比于解析優化方法,計算量顯著增加。混合求解方法具有復雜的框架,多用于處理包含信號燈干擾的節能車速優化問題。強化學習(reinforcement learning,RL)基于Markov 決策過程,通過智能體與環境的互動實現累積回報最大化,在復雜決策問題中表現出色,但是需要不斷探索和試錯,具有很高的訓練代價,尤其是隨著場景數量的增多,RL 的訓練成本會急劇增加。此外,模型預測控制(model predictive control,MPC)作為一種高效的滾動時域優化框架,在節能車速規劃問題中得到了廣泛應用。
2.2.1 解析優化方法
解析優化方法計算速度快,但要求節能車速規劃問題具有簡潔的形式。當坡度動態變化時,E.Ozatay等[53]基于線性的能耗模型和縱向動力學模型得到解析解,算法計算效率達到了動態規劃(dynamic programming,DP)的320~560 倍。在跟車場景中,解析方法在不增加行程時間的前提下顯著降低了BEV 能耗,但需要很多理想條件,如前車在優化時域內保持恒定加速度、無控制變量約束、無機械制動力、忽略傳動系統和動力電池的能量損失[67]。針對高速公路場景,J.Rios-Torres 和A.A.Malikopoulos[68]將網聯式車輛協同匝道匯入問題表述為無約束最優控制問題,并使用Hamilton 分析推導出解析解,提高了燃油經濟性和通行效率。
2.2.2 數值優化方法
用于節能車速規劃的數值優化方法包括DP、凸優化和序列二次規劃(sequential quadratic programming,SQP)等。DP 適用于具有最優子結構性質的復雜非線性優化問題,能夠得到全局最優解,因此經常作為其他方法的基準,但計算效率受限于狀態變量和控制變量的維數。DP 對節能車速規劃問題的適用性強,可以在時域和空間域靈活建模,因此可用于復雜行駛場景下的多約束多目標優化。ZENG Xiangrui 和WANG Junmin[56]在8 km 仿真道路上考慮道路曲率、限速、停車標志、前車和信號燈等干擾,使用DP 得到了BEV 的最優行駛車速,但計算時間長達10 h。為了提高DP 的計算效率,迭代動態規劃(iterative dynamic programming,IDP)通過迭代逐步縮小變量搜索范圍,在節能車速優化中得到了應用[55,69]。此外,云計算支撐的DP 算法相比車載計算可以降低2 個數量級的計算時間[61]。
凸優化主要包括二次規劃(quadratic programming,QP)、二次約束二次規劃(quadratically constrained quadratic programming,QCQP)和SOCP。由于動力系統能耗的非線性和行駛約束的多樣性,原始的節能車速規劃問題一般是非凸的。為了將原問題轉化為凸問題,凸近似和凸松弛是常用的技術手段,并且空間域建模能夠更方便地處理隨距離變化的道路坡度和限速。O.Borsboom 等[62]通過使用二次多項式表示無極變速器和電機的功率損失,將BEV 賽車圈速優化問題轉化為SOCP 問題并實現快速求解。在節能跟車場景中,JIA Yanzhao 等[70]將多目標車速優化問題中的非線性等式約束松弛為二次不等式約束,提出了一個基于QCQP 的空間域MPC 算法,取得了與基于DP 的MPC算法相近的節能效果。
SQP 基于Taylor 展開將原復雜非線性優化問題在迭代點處轉化為相對簡單的QP 問題,并將求解結果作為原問題的下一迭代方向,直至收斂。SQP 計算效率高,收斂性好,邊界搜索能力強,是求解中小規模非線性優化問題的常用方法,一般用于時域建模的節能車速規劃問題[71]。面向考慮動態坡度和動態限速的100 km級別超長距離行駛任務,A.Hamednia 等[72]提出了一個高效的節能車速分層優化框架,將原混合整數非線性規劃問題轉化為上層非線性優化問題和下層擋位優化問題,在對下層問題進行離線優化的基礎上,通過PMP 分析降低上層問題的狀態變量維數,最后使用基于SQP 的MPC 算法求解最優加加速度和制動力。
2.2.3 混合求解方法
節能車速規劃的混合求解方法大多應用于信號燈路口通行場景,主要分為兩階段優化[52,59,73]和恒定模式優化[46,74-75]。兩階段優化方法首先確定最佳的綠燈通行窗口或通行時間,然后進行車速軌跡優化,通過問題分解大大降低了計算復雜度[76]。DONG Haoxuan 等[55]提出了一種適用于多信號燈通行場景的兩階段生態駕駛策略,首先將綠燈通行問題轉化為時間最短的路徑路徑問題,并使用A*算法搜索最佳綠燈窗口,然后以降低能耗和動力電池容量衰退為目標,在MPC 框架下使用IDP 求解最優車速。恒定模式優化方法通常按照車輛通過信號燈路口的不同情況進行分類,并基于經驗規則假設車速由勻加速、勻速和勻減速等運動模式組成,通過計算相應類別和模式下的最優曲線參數確定車速軌跡。M.Alsabaan 等[75]提出了一個綜合的車速優化框架,基于4 種可能的交叉口通行場景,使用有效的啟發表達式計算近似最優的參考速度,有效降低了油耗和CO2排放。
2.2.4 強化學習方法
RL 在面向自動駕駛的車速優化、換道決策以及橫縱向聯合控制等方面得到了廣泛研究[77-78],包括傳統RL 算法和深度強化學習(deep reinforcement learning,DRL)算法。傳統RL 算法采用離散Q 表記錄動作價值函數,受限于問題維數和離散精度,包括Q-learning和SARSA 等。Q-learning 算法在考慮道路坡度的BEV跟車控制中實現了93.8%的DP 最優節能效果[79],并在ICEV 信號燈路口通行場景中降低了CO2排放、停車時間和次數[80]。DRL 算法通過引入深度NN 克服了傳統RL 算法難以處理高維輸入的缺陷,包括深度Q 網絡(deep Q-network,DQN)、深度確定性策略梯度(deep deterministic policy gradient,DDPG)、近端策略優化(proximal policy optimization,PPO)和軟演員-評論家(soft actor-critic,SAC)算法等。其中,DDPG 算法結合了DQN 算法與確定性策略梯度算法,能夠實現連續動作輸出,在跟車[81-82]和信號燈路口通行[83]場景中取得了良好的控制效果。GUO Qiangqiang 等[84]還提出了一種包含DQN 和DDPG 的混合DRL 方法,實現了智能網聯汽車的橫縱向聯合控制。雙DQN(double DQN,DDQN)和雙延遲DDPG(twin delayed DDPG,TD3)算法能夠抑制值函數的過估計,進一步拓展了DRL 算法在節能車速優化領域的應用前景[85-86]。研究表明,基于TD3 的城市場景生態駕駛算法與智能駕駛員模型相比能夠提升19%的節能效果[85]。
3 節能充電規劃
節能充電規劃(eco-charging)是指在動力電池和電網約束下,對新能源汽車的充放電行為進行合理規劃,從而實現用戶成本和電網性能優化的技術,相關研究如表3 匯總所示。充電規劃由最初的無序充電過渡到單向有序充電(V1G),最終向雙向V2G 智能充電發展。如圖4 所示,新能源汽車通過V2G 設備接受負荷聚合商提供的充電服務,從而實現與電網的互動。負荷聚合商是新興的電力市場參與方,負責向電力公司提供需求響應資源,并向用戶收取或支付充放電費用。V2G不僅能夠實現電網負荷的削峰填谷,還能夠降低風力和光伏等可再生能源的間歇性對電網造成的沖擊,提高電網的可再生能源消納能力[89]。研究表明,V1G 和V2G 充電策略相比無序充電可以降低32%和39%以上的充電成本[90]。車輛到家庭(vehicle-to-home,V2H)技術和車輛到大樓(vehicle-to-building,V2B)技術是V2G的變種,適用于新能源汽車作為儲能中心的微電網環境,能夠降低區域運行所需的電力成本。
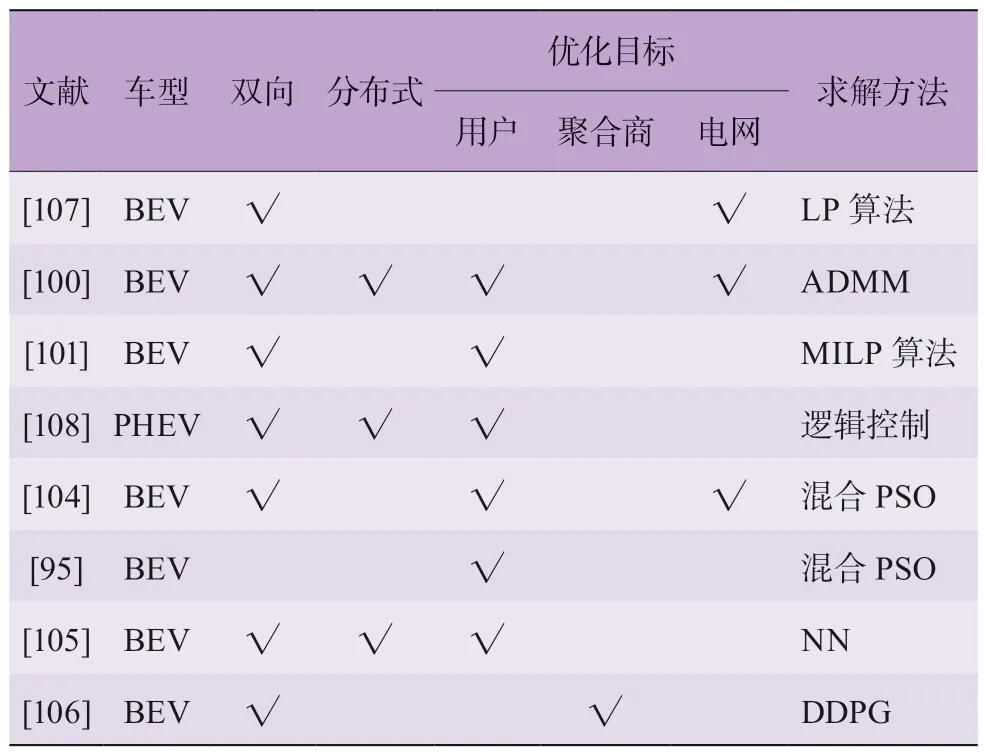
表3 節能充電規劃研究
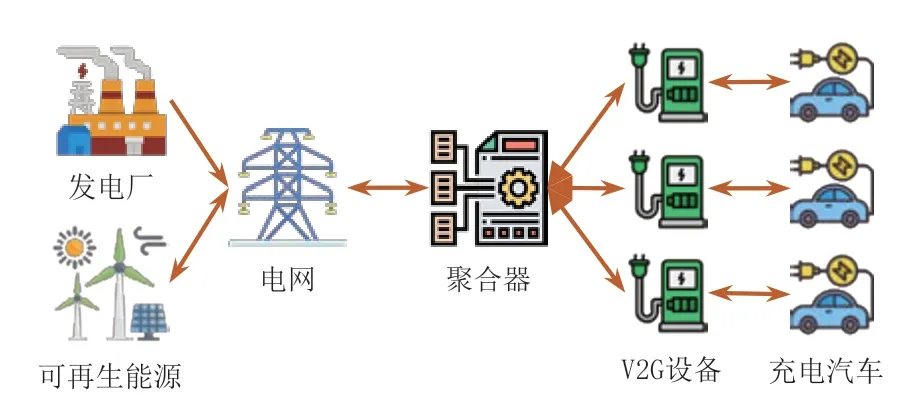
圖4 節能充電規劃場景示意
3.1 問題描述
大規模新能源汽車接入電網帶來的充電負荷具有隨機性和分散性[91],會對配電網電壓、損耗和三相平衡帶來不良影響,因此有必要對新能源汽車充電進行有序規劃與調度。節能充電規劃涉及充電用戶、聚合商和電網三方,對應不同的研究層面和優化目標。在單一新能源汽車充電控制中,用戶希望到達充電樁所需時間和充電排隊時間短、充電速度快且費用低。在多車或車群充電控制中,聚合商希望在服務能力內用戶訂單多、整體效益高。在多聚合器層面的充電控制中,電網希望負荷平穩均衡、波動小。此外,電價是充電規劃的關鍵影響因素,優化充電定價方案可以有效降低用戶充電成本和充電站的服務丟失率[92]。
在功率流向方面,單向V1G 假設電能僅可以從電網流向電動汽車,而雙向V2G 還允許電動汽車向電網饋電。與單向模型相比,雙向模型不僅支持更高的電動汽車滲透率和可再生能源融入水平[93],還可以為充電車主提供額外的收入[90]。
在控制方式方面,節能充電規劃分為集中式和分布式。在集中式控制中,聚合器收集電動汽車的動力電池參數和充電需求,并結合可用的充電時段等信息對群體充電任務進行優化。在分布式控制中,電動汽車根據聚合器的信息并結合自身需求進行個體充電優化[94]。集中式控制能夠在所有信息可用的情況下計算出最優調度方案,但難以滿足實時性要求。分布式控制可擴展性強,優化難度有效降低,適用于大規模新能源汽車的充電調度。
在車輛移動性方面,節能充電規劃可以針對移動車輛和靜止車輛。移動車輛需要考慮行駛速度和到充電設施的距離及其對SOC 的影響[94],更精確的速度控制有利于緩解充電擁塞和等待時間[95]。隨著無線充電技術的發展,車輛移動感知充電還可以借助車與車之間的能量傳遞完成[96]。此外,充電方式和條件也是需要考慮的因素。研究表明,使用脈沖充電而非連續充電可以降低動力電池冷卻的能量消耗[97],且適合充電的最佳SOC 區間為20%~80%[98]。
3.2 方法分類
節能充電規劃方法分為數學規劃算法、元啟發式算法和數據驅動的方法等。數學規劃算法基于對問題的準確建模,能夠獲得精確解,但求解速度對問題的規模和非線性特征十分敏感。元啟發式算法能夠平衡計算時間,實現對大規模優化問題的近似求解,并且適用于充電速率、充電狀態、定價和負荷曲線等信息不充分的情況[93]。數據驅動的方法從大量訓練數據中學習最優策略,具有實時應用潛力,能夠用于復雜非線性問題,但是對數據質量要求高,訓練時間長。
3.2.1 數學規劃算法
用于節能充電規劃的數學規劃算法主要包括凸優化和混合整數規劃算法。凸優化算法適用于不考慮車輛移動特性和交流潮流非線性等式約束的節能充電規劃問題,一般能夠在多項式時間內得到全局最優解。考慮BEV 充電速率、最大充電成本和電網容量約束,LP 算法被用于求解以聚合商收益或用戶充電成本為目標的靜態充電調度問題[99]。J.Rivera 等[100]提出了一種可擴展分布式凸優化框架,針對QP 形式的聚合器優化子問題和電動汽車充電優化子問題,使用交替方向乘子法(alternating direction method of multipliers,ADMM)進行求解。
混合整數規劃問題是一種同時包含連續和離散控制變量的NP 難問題,具有很高的計算復雜度,難以用于大規模系統的充電優化,分為混合整數線性規劃(mixed-integer linear programming,MILP)和混合整數非線性規劃(mixed-integer nonlinear programming,MINLP)。在MPC 框 架 下,R.Iacobucci 等[101]使 用MILP 算法對共享BEV 的運輸服務和充電行為進行優化,在不顯著影響等待時間的情況下大幅降低了充電成本。針對不平衡配電系統中電動汽車協調充電問題,F.J.Franco 等[102]通過對非線性的負載電流、有功和無功功率、電壓和電流約束進行分段線性近似,將原MINLP 問題簡化為MILP 問題,從而降低了求解難度。
3.2.2 元啟發式算法
元啟發式算法能夠平衡求解精度和計算時間,在非凸充電優化問題中廣泛應用。考慮充電站的物理和功率約束,ACO 算法被用于最小化充電延遲的電動汽車單向充電調度[103]。得益于良好的擴展性,不同元啟發式算法還可以相互結合,通過優勢互補提高全局搜索能力。一種改進的PSO 算法采用Gauss 變異迫使某些粒子發生突變,并應用退火機制使粒子以一定概率接受不利突變,被用于求解電網運行和動力電池容量約束的BEV 充放電問題[104]。K.A.Kalakanti 和S.Rao[95]提出了一種PSO 與螢火蟲算法相結合的混合元啟發式算法,用于考慮充電站快充和慢充選項的BEV 充電調度,實現了比單一算法更好的性能。
3.2.3 數據驅動的方法
用于節能充電規劃的數據驅動方法主要包括監督學習算法和DRL 算法。監督學習基于帶標簽的最優數據集,采用NN 和決策樹等模型進行訓練。以時間、能耗和SOC 為輸入,NN 模型可以為BEV 充電推薦不同的運行模式,如V1G、V2G 或閑置[105]。但是,大量標簽樣本的獲取和標注存在挑戰。DRL 通過智能體和環境的不斷互動自行產生樣本數據并能夠覆蓋更多的情況,擺脫了對標簽的依賴,在序列決策問題中表現出更強的學習能力。DING Tao 等[106]考慮用戶行為和環境變化的不確定性,利用DDPG 算法求解最優充電策略,在滿足電網約束的同時實現了聚合商利潤的最大化。
4 能量管理
能量管理(energy management)是指根據整車功率需求,在滿足動力系統約束的條件下對不同動力源進行功率分配,從而提高能量效率和部件壽命的技術。為了跟蹤節能車速規劃層輸出的目標車速,PHEV 和FCV等混合能源電動汽車需要采用分層控制架構[109],包含上層能量管理監督控制和下層動力系統部件控制。工況是影響整車功率需求的關鍵因素,對能量管理至關重要。通過瞬時工況識別、未來工況預測和全局工況估計等技術手段,能量管理策略(energy management strategy,EMS)可以利用豐富的工況信息,顯著提升節能水平[110]。
在混合能源電動汽車中,混合動力汽車(hybrid electric vehicle,HEV)是PHEV 的技術基礎,因此本節也將其作為研究對象進行討論。HEV 和FCV 的動力傳動系統構型如圖5 所示。HEV 包含發動機、電機和動力電池等,分為串聯式(series X,S-X)、并聯式(parallel X,P-X)和混聯式。增程式混合動力汽車是一種串聯式構型的PHEV。混聯式HEV分為功率分流式(power-split X,PS-X)和串并聯式(series-parallel X,SP-X)。FCV 以燃料電池(fuel cell,FC)為主能量源,還需配置動力電池(battery,B)和/或超級電容(super capacitor,SC)以克服燃料電池功率響應慢的缺點,分為FC/B、FC/SC和FC/B/SC 等構型。動力電池可外接充電的FCV 叫做插電式燃料電池汽車(plug-in FCV,PFCV)。
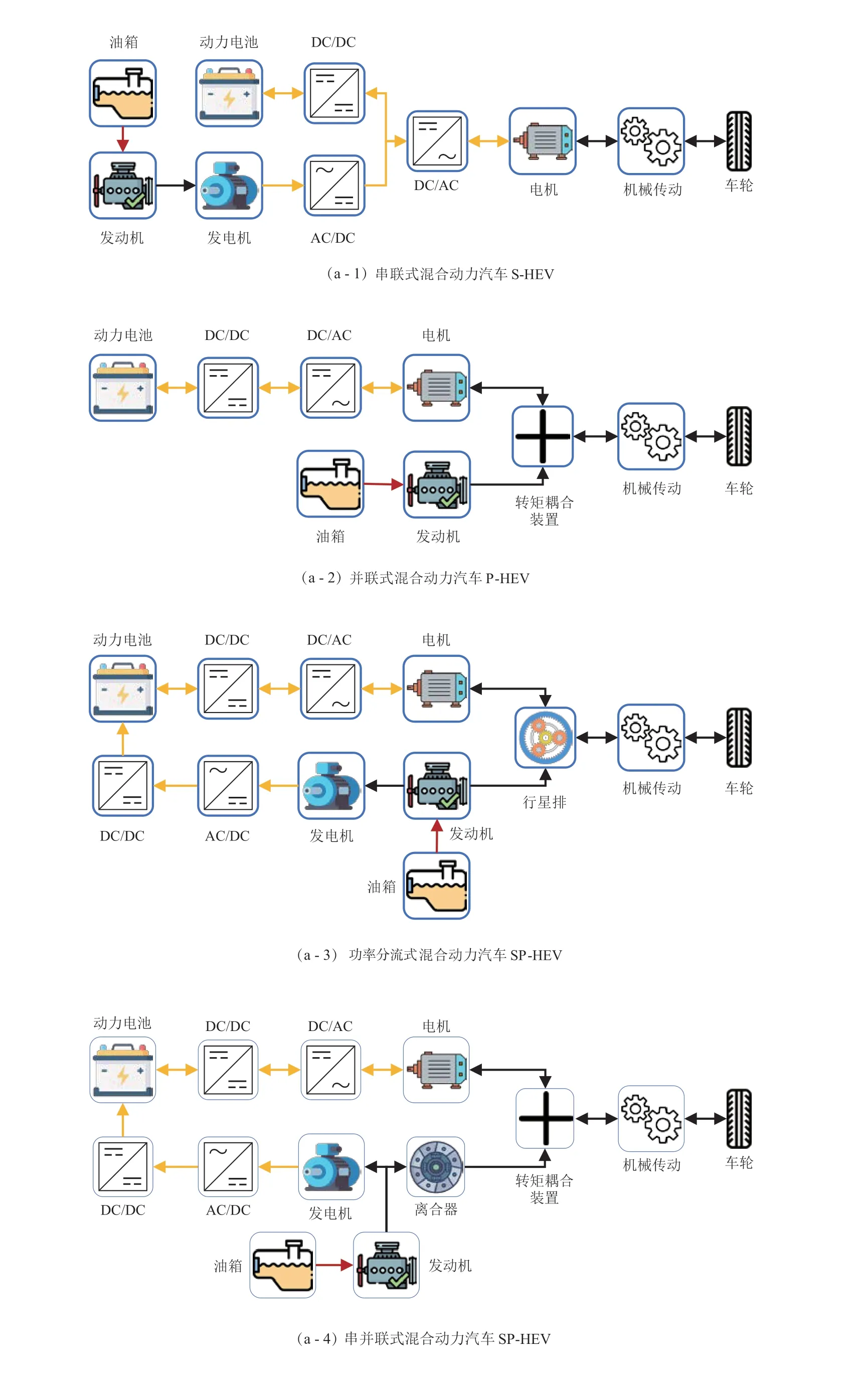
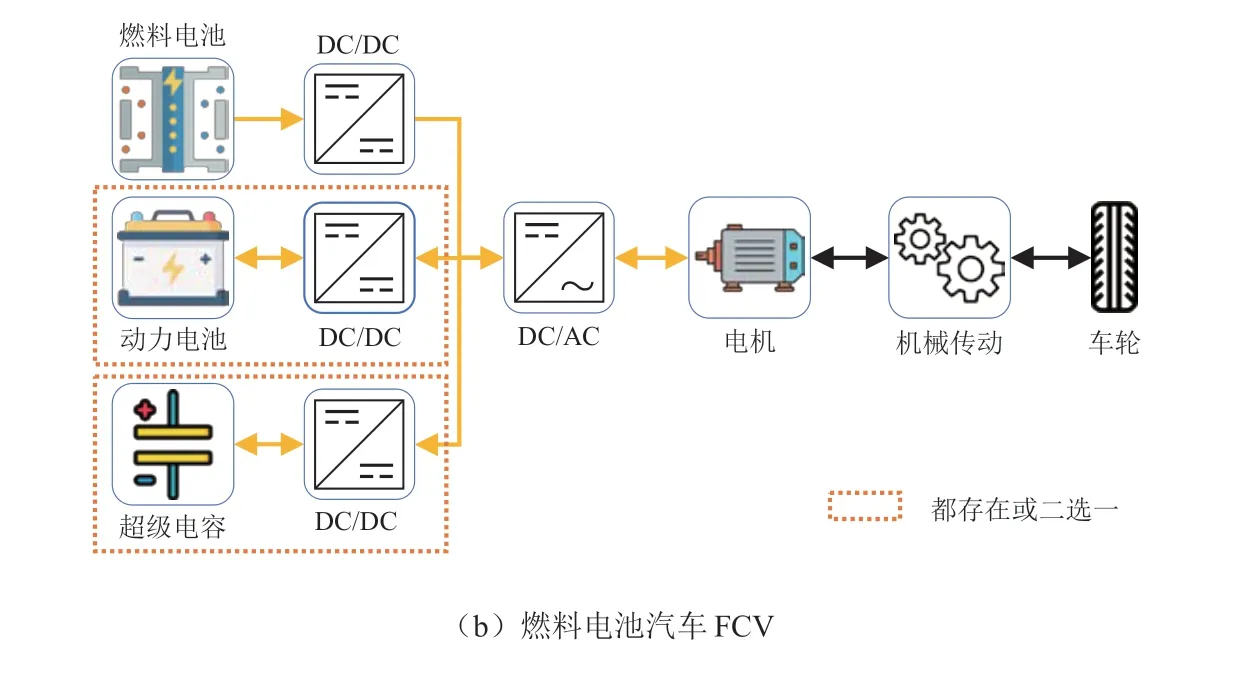
圖5 HEV 和FCV 的動力傳動系統構型
4.1 問題描述
能量管理問題的輸入是整車功率需求,狀態變量一般是動力電池SOC/SOE,控制變量包括擋位和部件功率/轉矩等,其中擋位、發動機啟停或燃料電池啟停等離散控制變量可以由外部程序確定[111],也可以和部件功率等連續控制變量一同優化。整車功率需求與車速、加速度和道路坡度等工況信息相關,受到駕駛員以及包括前車和信號燈等道路交通環境的影響。通過工況識別和預測等技術獲取更加準確和豐富的需求功率能夠有效提升能量管理的節能控制效果。駕駛風格[112]和工況特征識別可以提高能量管理控制的自適應能力,車速、道路坡度和駕駛意圖預測能夠提供未來短期行駛信息并用于預測能量管理控制。此外,對于公交車或擺渡車等具有固定行駛路線的車輛,全局工況構建可以估計駕駛周期內的整條工況,進而實現更加高效的動力電池全局電量規劃[113]。
能耗是能量管理問題的主要優化指標,包括發動機油耗、動力電池電耗和燃料電池氫耗。PHEV/HEV油耗與發動機轉速和轉矩有關,一般用發動機MAP表示,也可以使用函數擬合,比如PHEV 油耗可以擬合為動力電池電流的二次函數[114]。FCV 氫耗與燃料電池系統凈功率有關,可以結合效率曲線進行計算。除了對車輛能耗進行優化,現有研究還開始關注動力電池和燃料電池的循環壽命。動力電池壽命的影響因素包括充放電倍率、操作溫度和放電深度等,其退化模型分為電化學模型、數據驅動的模型和半經驗模型[115]。比如,一種磷酸鐵鋰電池的半經驗容量衰退模型可以表示為活化能、通用氣體常數、溫度和總安時通量的擬合函數[116]。燃料電池壽命受工況影響很大,其退化模型分為基于物理的模型、數據驅動的模型和混合模型[117]。比如,燃料電池電壓退化率可以表示為大范圍負載變化次數、啟停次數、怠速時間和高功率負載時間的線性函數[118]。
4.2 方法分類
能量管理方法分為基于規則的方法、基于模型的方法和數據驅動的方法。基于規則的方法使用專家經驗設計邏輯規則,實時性好,在工業界廣泛應用,但難以達到最優的節能效果。基于模型的方法依賴于面向控制的車輛動力傳動系統模型,需要建立能量管理最優控制問題并使用優化算法進行求解,實時性較差,但節能效果更佳。數據驅動的方法無需控制對象的數學模型,對高維復雜問題的適用性強,實時性較好,具有可遷移能力,是近年來的研究熱點,但是需要大量數據樣本,訓練成本高,且難以保證動力電池SOC的安全性約束。
4.2.1 基于規則的方法
基于規則的方法分為確定性規則和模糊規則,典型代表是適用于PHEV 的電量耗盡-電量維持(charge depleting-charge sustaining,CD-CS)策略。豐富的駕駛信息,如駕駛員風格、行駛里程、道路類型、坡度和限速等,可以用于估計動力電池剩余電量,從而為規則的設計提供指導[119-120]。進一步地,基于DP、GA 和PMP 等優化算法求解得到的能量管理數據,提取關鍵的閾值參數并用于規則制定[121-124],能夠有效提升規則策略的節能效果。PENG Jiankun 等[123]根據DP 優化結果對PHEV 的發動機工作區進行重新校準,硬件在環(hardware in the loop,HIL)實驗結果表明,所提方法相比校準前分別降低了10.45%和4.75%的油耗和電耗。此外,工況識別和預測可以提升規則策略的工況自適應能力。YIN He 等[125]提出了一種針對電池/超級電容混合儲能電動汽車的自適應模糊邏輯控制策略,根據歷史駕駛模式在線調整最優的模糊隸屬函數,并通過HIL 驗證了算法的良好性能。
4.2.2 基于模型的方法
基于模型的方法分為全局優化方法、瞬時優化方法和滾動時域優化方法。全局優化方法能夠在全局工況已知的條件下得到最優控制序列,一般具有較高的計算成本,包括DP、元啟發式算法和凸優化算法等。瞬時優化方法根據瞬時工況進行實時優化,可以通過工況識別等方式提高自適應能力,包括PMP 和等效消耗最小策略(equivalent consumption minimization strategy,ECMS)。滾動時域優化方法的典型代表是MPC,基于未來短期工況預測對有限時域內的功率分配問題進行滾動優化,計算量較大,但在迅速提升的車載算力支撐下未來具有廣闊的應用前景。
1)全局優化方法。DP 具有全局最優性,對問題的復雜非線性特征不敏感,其反向計算過程面臨維數災難的問題,經常作為其他EMS 的對比基準或輔助方法。現有基于DP 的能量管理開源方案主要使用Matlab 進行開發,包括通用的確定性DP 函數[126]、針對FC/B/SC 的DP 算法GUI[127]以及面向新能源汽車的標準化DP 軟件包[128]。后者解決了DP 在新能源汽車應用中的維數災難和標準化等問題,提高了計算效率和計算精度。
元啟發式算法具有很強的通用性和魯棒性,包括GA[129]、PSO 算法和模擬退火法(simulated annealing,SA)[130]等。M.Wieczorek 和M.Lewandowski[131]將 動力電池和超級電容的功率表示為需求功率的連續函數,并使用GA 優化擬合系數,顯著延長了動力電池循環壽命。為了提高搜索效率,現有研究利用規則限制變量搜索空間[132]或對元啟發式算法進行改進。針對考慮換擋控制的P-HEV 能量管理問題,CHEN Syuan-Yi 等[133]提出了一種收斂速度更快、更平滑的動態PSO 算法并通過HIL 驗證了算法實時性和有效性。
凸優化算法計算性能好,在PHEV/HEV、FC/B[134]和混合儲能電動汽車[135]的能量管理中得到了應用,但是需要對原問題進行凸化處理。P.Elbert 等[136]首先分析得出S-HEV 發動機的最佳啟動條件是需求功率超過某個非恒定閾值,進而將原混合整數規劃問題轉化為凸問題,并使用凸優化算法迭代求解最佳功率分配。S.East 和M.Cannon[111]以P-PHEV的SOE為狀態變量,使用二次多項式擬合發動機油耗和電機輸入功率,并假設動力電池參數不隨SOC 變化,將原問題轉化為凸優化問題,最后使用ADMM 和IPM 進行求解。
2)瞬時優化方法。PMP 通過構建包含協態λ的Hamilton 函數,推導出最優控制的必要條件,并根據實時λ確定最優功率分配。ECMS 來自于工程經驗,使用等效因子(equivalent factor,EF)將瞬時電耗補償為油耗,進而得到最優控制,可以由PMP 導出[137]。PMP 分析結果表明,最優λ是與工況和動力電池特性相關的時變參數。因此,為了實現工況自適應,λ和EF 需要實時更新,相應的方法分別稱為自適應PMP(adaptive PMP,A-PMP)和自適應ECMS(adaptive ECMS,A-ECMS)。C.Musardo 等[138]最早提出了一種A-ECMS 方法,根據不同工況實時估計EF。在后續研究中,EF 的實時優化使用了NN[139]和解析算法[140],還可以基于發動機狀態進行二次修正[141]。在A-PMP 方法中,λ的在線更新可以基于不同工況下SOC 變化量與λ的平均關系曲線[142]或離線計算的最優工況片段特征-λ關系表[143]。但是,當車輛工作在較窄的SOC 區間時,由于動力電池的開路電壓和內阻接近恒定,最優λ可以近似為恒定值[144]。
3)滾動時域優化方法。MPC 是預測能量管理的基本框架,包含工況預測、滾動優化和反饋控制等過程,相關研究如表4 匯總所示。在常規MPC 控制策略的基礎上,分層MPC 方法引入了全局SOC 規劃層,以實現PHEV 和PFCV 動力電池電量的全局合理分配。全局SOC 規劃層基于交通流或歷史行駛數據進行全局工況構建,生成SOC 參考軌跡并用于下層MPC跟蹤控制。工況預測方法包括Markov 鏈(Markov chain,MC)、ARIMA[145]和NN 等。其中,NN 預測模型分為徑向基函數神經網絡(radial basis function neural network,RBF-NN)、多層感知器(multilayer perceptron,MLP)、循環神經網絡(recurrent neural network,RNN)和Informer 模型[59]等。研究表明,NN 具有良好的預測效果和計算效率[146],還可以進一步結合GA[147]和小波變換[148]以提升預測性能。SOC 規劃方法包括基于簡單規則的距離分配法[147,149-150]、基于簡化能量平衡模型的DP[151]和基于最優數據訓練的NN[113]等。滾動優化方法除DP 和PMP 方法外,還包括隨機動態規劃(stochastic dynamic programming,SDP)[152]、QP[153]和SQP[147,154]等。

表4 基于MPC 的預測能量管理研究
4.2.3 數據驅動的方法
用于能量管理的數據驅動方法主要包括監督學習和RL 算法。在監督學習中,最優訓練數據可以使用DP[155-157]和GA[158]等全局優化方法獲得,學習器一般為MLP 形式的NN。由于工況的多樣性,單個NN模型很難適用于所有工況類型。為了增強NN 的工況自適應能力,M.P.Munoz 等[159]針對多條工況訓練相應的NN,并選取其中2 個適應性強的NN 分別用于城市和高速工況的FC/B 能量管理。進一步地,L.Y.Murphey 等[155]首先對11 類包含道路類型和擁堵程度的駕駛環境以及5 類駕駛趨勢進行預測,然后以PSHEV 的車速、SOC、需求功率和駕駛趨勢為輸入,針對不同的駕駛環境和控制變量分別訓練相應的NN,相比原始EMS 節省了3%~20%的油耗。
不同于監督學習算法對最優數據集的依賴,RL 算法,尤其是DRL 算法,可以從環境中主動學習最優策略,是能量管理領域的研究熱點。LI Yuecheng 等[160]針對雙電機四驅S-HEV,由累計行程信息確定參考SOC,并使用DDPG 算法進行前后軸電機的功率分配,實現了比MPC 更高的計算效率,但是針對單條標準工況的離線訓練需要將近10 min 才能收斂。高昂的訓練成本不利于通用EMS 的開發,通過經驗嵌入或知識遷移提高DRL 模型的訓練效率和泛化能力是潛在的研究方向。利用發動機在最佳曲線工作等經驗規則,可以有效提高DRL 智能體的探索效率,降低問題復雜度和訓練代價[161]。進一步地,遷移學習能夠將基于DRL 的EMS 在構型相異的HEV 之間進行傳遞,且收斂效率與基準方法相比提升了近70%[162]。
5 多任務集成優化
新能源汽車的節能規劃與控制本質上是多項節能技術的相互耦合和集成,但由于問題的復雜性,多數研究通常會將其解耦為路徑規劃、車速規劃、充電規劃和動力系統能量管理等子問題。相比子任務優化問題,多任務集成優化問題雖然控制維度和計算復雜度更高,但不僅更符合實際情況,還可以挖掘更多的節能潛力。如BEV 的節能充電導航同時涉及路徑規劃和充電規劃,PHEV 和FCV 節能車速規劃是后續動力系統能量管理的需求輸入模塊。新能源汽車多任務集成優化問題可以采用耦合優化或解耦優化方法求解。耦合優化方法將集成問題建模為單個優化問題并在統一的優化架構下求解,具有全局最優性,但難以實現和部署。解耦優化方法將集成問題分解為多個子問題并通過順序優化或分層迭代等方式進行求解,降低了計算復雜度,能夠以一定的最優性損失實現計算效率的大幅提升。
5.1 路徑規劃和充電規劃集成優化
新能源汽車充電路徑導航涉及路徑規劃和充電規劃,可以建模為混合整數規劃問題,優化指標包括行駛時間、充放電時間、充電成本和V2G 收益等,控制變量包含路徑決策和充放電決策,相關研究如表5 匯總所示。耦合優化方法同時求解最優路徑和充電功率,包括自適應Dijkstra[163]、A*[164]、MILP[165]和MINLP[166-167]求解器以及混合元啟發式算法[168-169]等。YI Zonggen等[167]基于數據驅動的能耗模型,以旅行時間和最終電量為約束,利用MINLP 求解器SCIP 得到電耗成本最低的BEV 車隊行駛路徑和充電策略,證明了環境溫度對能耗和充電需求存在顯著影響。使用解耦優化方法,YAO Canqi 等[170]通過雙線性解耦和松弛操作,將原問題分解為2 個LP 形式的子問題,即優化出行時間、費用和服務收益的路徑規劃與優化充電時間和成本的充電規劃,并在多項式時間內獲得了近似最優解。
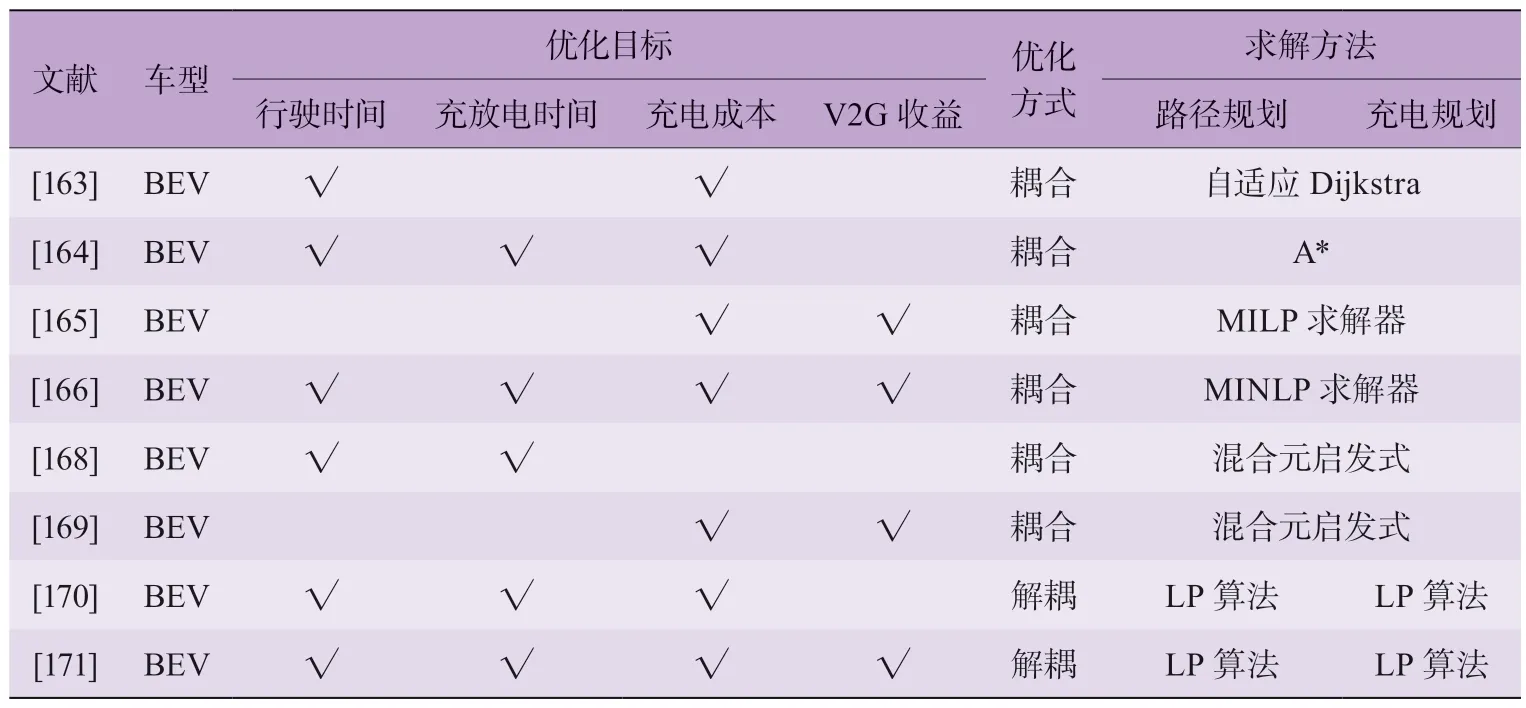
表5 路徑規劃和充電規劃集成優化研究
5.2 路徑規劃和能量管理集成優化
混合能源電動汽車的節能路徑規劃需要評估動力系統能耗,是一種以路徑規劃為主并融合能量管理的集成優化問題,可以建模為混合整數規劃問題,控制變量包含路徑和動力系統能耗估計決策,相關研究如表6 匯總所示。動力系統能耗可以通過基于模式優化或功率分配的能量管理進行計算。模式優化主要針對PHEV,假設車輛在給定模式和工況類型下具有固定的單位里程油耗和電耗[172-173],無需進行動力傳動系統建模,實現了問題簡化,包括純電驅動模式、發動機驅動模式、電量維持模式和混合驅動模式等[174]。
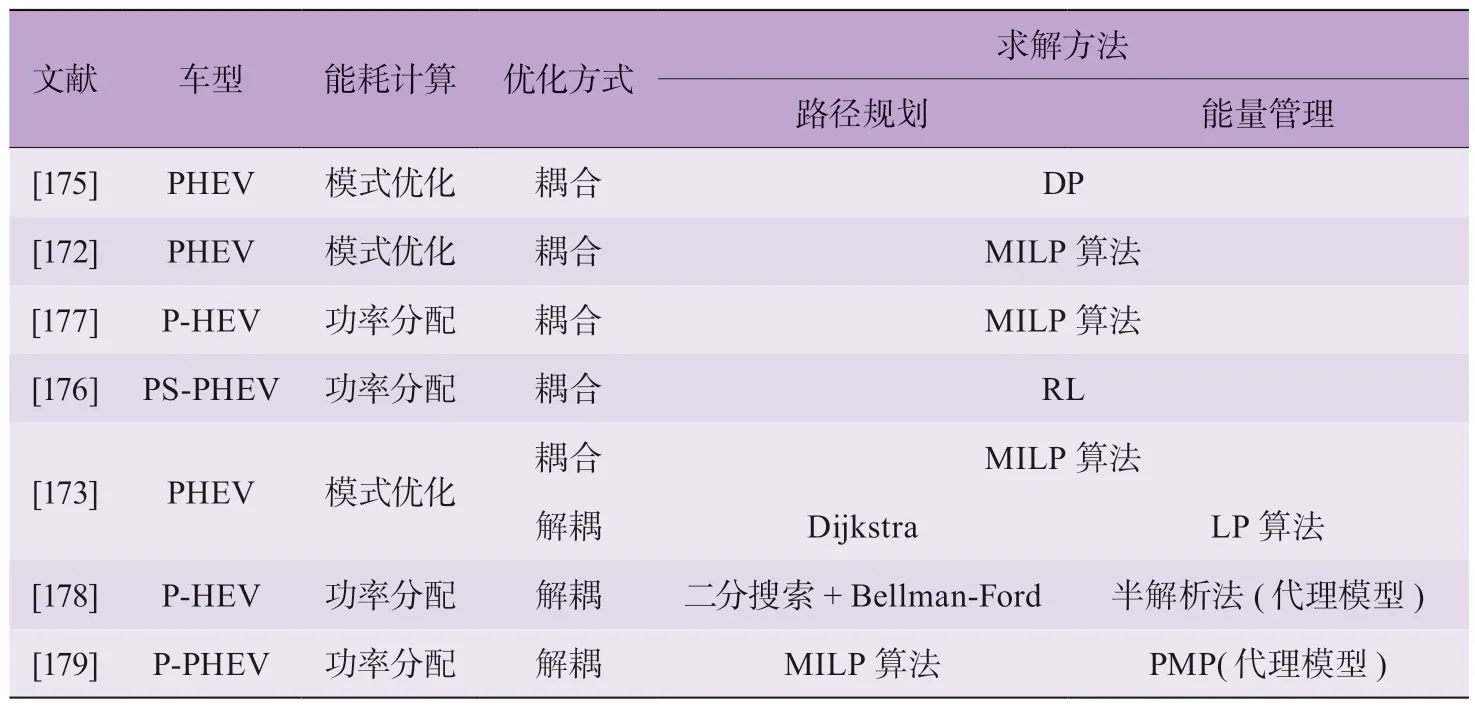
表6 路徑規劃和能量管理集成優化研究
耦合優化方法同時進行路徑決策和動力系統能量管理,包括DP[175]、RL[176]和MILP 算法[172,177]等。A.Caspari 等[177]假設車輛以道路限速勻速行駛,采用機械與數據驅動的混合模型將原混合整數二次規劃問題簡化為MILP 問題,求解效率提高了近105 倍。解耦優化方法可以分層依次求解路徑規劃和能量管理子問題,也可以將能量管理子問題的優化結果作為能耗代理模型集成到路徑規劃子問題中。A.Houshmand 等[173]首先使用Dijkstra 算法選取最優路徑,然后利用LP 算法求解PHEV 動力系統不同工作模式之間的最優切換策略。G.De Nunzio等[178]將能量管理優化得到的P-HEV路段油耗作為SOC 變化量的函數,使用二分搜索和Bellman-Ford 算法計算滿足SOC 約束的最優路徑。
5.3 車速規劃和能量管理集成優化
混合能源電動汽車的節能車速規劃需要優化動力系統能耗,控制變量包括車輛運動和動力系統功率分配決策,相關研究如表7 匯總所示。該類問題主要面向PHEV/HEV[180]和FCV,少數涉及雙電機四驅BEV[181-182]。除了動態坡度、動態限速、前車和信號燈,有些研究還考慮了后車和動態滾阻系數等其他干擾[183]。車速規劃和能量管理集成優化方法主要包括凸優化、DP、MPC 和DRL 算法。凸優化在耦合優化框架下一般僅考慮動態坡度干擾,并通過凸近似和凸松弛將原非凸問題轉化為空間域SOCP 問題[184-185],在解耦優化框架下可以是單層凸化[183,186]或雙層凸化[187-188]。DP 可以通過輔助方法降低問題維數并提高計算效率,如分別借助PMP 和NN 減少狀態變量[189]和控制變量[190]的個數。MPC 在耦合優化和解耦優化中均有應用,如基于連續/廣義最小殘差法(continuation/generalized minimum residual,C/GMRES)的雙MPC 切換策略[191]以及基于快速投影梯度法(projection gradient method,PGM)和QP 算法的分層策略[183]。DRL 算法適用于多種駕駛場景,如考慮動態限速、前車和信號燈約束的P-HEV 城市生態駕駛[192]以及五車環境下的PS-PHEV匝道合流[193]等。
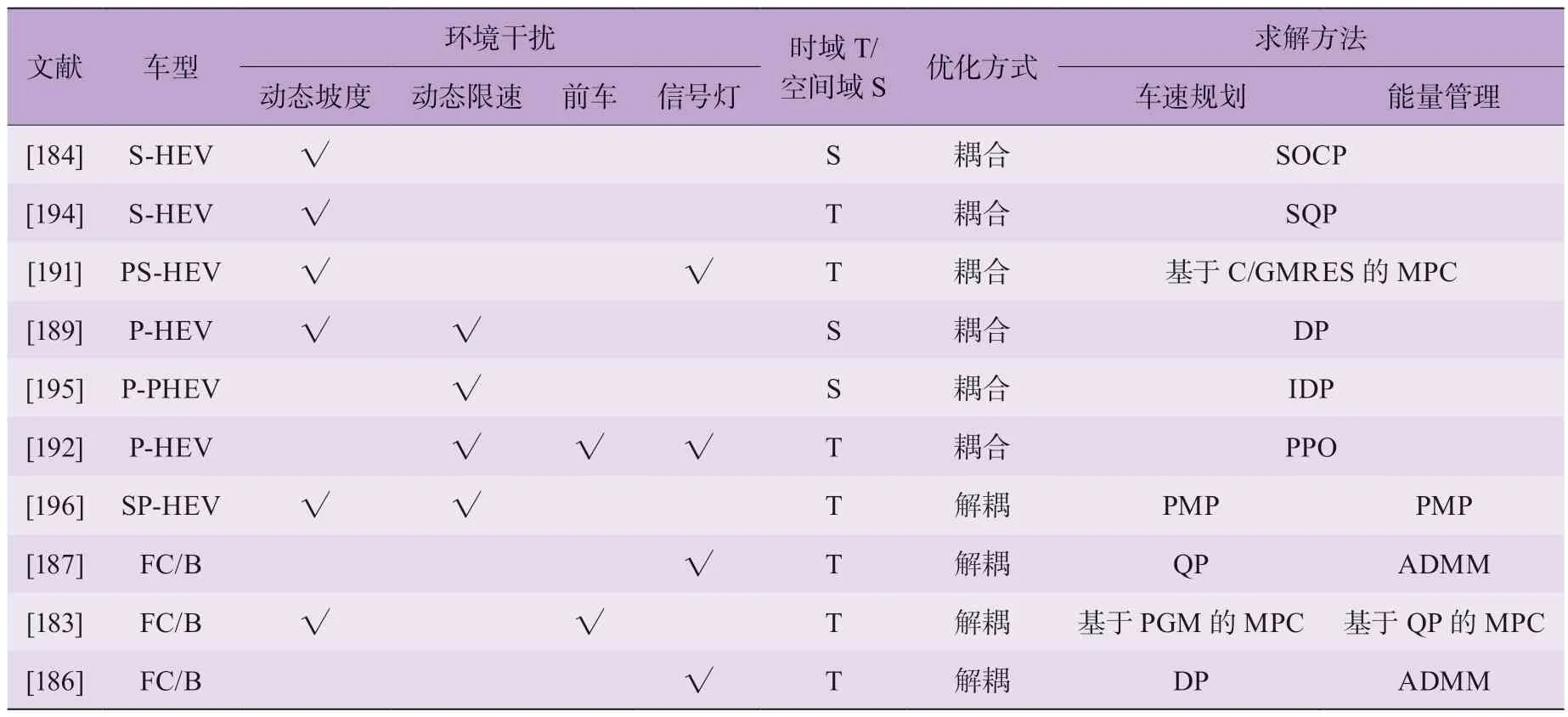
表7 車速規劃和能量管理集成優化研究
6 節能規劃與控制技術發展趨勢
新能源汽車節能規劃與控制技術是近15 年來一直被持續關注的重要學術領域和產業技術,北京理工大學電動車輛國家工程研究中心在該領域開展了系統研究,成果在宇通、廣汽、現代和比亞迪等車輛上得到了應用,涉及BEV、PHEV 和FCV 等多種車型。節能車速規劃面向復雜交通場景,考慮多信號燈[47,59]、不確定性信號相位[9]、路口隊列和交通流[50]等因素,研究團隊提出了有效、魯棒和計算效率高的車速規劃系統方法,包括了基于優化和機器學習的多種探索和實踐。對于能量管理問題,研究團隊提出了引導式MPC 節能規劃與控制理論[151]以及基于NN 的車速工況預測方法[146],并通過將FCV 能量管理問題凸化實現了凸優化方法在該動力系統構型下的拓展[134]。進一步地,在車速規劃和能量管理集成優化方面,研究團隊面向跟車[181-182]和信號燈通行[186-187]等復雜場景問題設計了融合凸優化的解耦優化求解方法,實現了節能效果與計算效率的平衡。
當前,復雜的行車環境和多樣化的控制需求對節能規劃與控制技術的實時性、魯棒性和高效性提出了更高要求。在智能化技術和V2X 通信的快速發展和支撐下,新能源汽車節能規劃與控制技術未來可能的重要發展趨勢如下:
1)考慮環境時變性和行為隨機性的新問題。現實交通環境受到各類交通參與者、道路條件和交通控制信號的影響,是動態變化且包含隨機因素的復雜人-車-路耦合系統。以往的新能源汽車節能規劃與控制技術對環境的時變性和隨機性考慮不足,往往做出靜態或準靜態場景假設,但相關技術的產業化落地需要充分考慮現實交通環境的復雜性。
2)運用先進預測和高效求解等手段的新算法。為了表征時變隨機的復雜交通環境,先進預測技術可以基于數據驅動和類人推理等方式學習微觀個體行為和宏觀交通行為的演變規律并對其進行精準預測,進而服務于新能源汽車的節能規劃與控制。另一方面,時變隨機的交通環境增加了節能規劃與控制問題的復雜度,開發更加高效的求解算法也至關重要。
3)系統解決多車多任務多維度問題的新方法。在智能網聯技術同步快速發展的趨勢下,多車協同的多任務集成優化問題尚未被充分考慮和研究。這是由于多維度耦合給問題建模、求解、驗證和實驗等各個研究環節帶來了困難,且智能汽車與非智能汽車的長期共存也增加了場景的多樣性。當前尚缺乏綜合考慮多車多任務多維度優化的系統性新方法。
4)在真實場景下可復制推廣的新應用。現有節能規劃與控制研究大多基于仿真環境開展,經過實車實驗和驗證的成果數量有限,在現實場景中的應用仍然面臨諸多阻礙[197],如V2X 通信面臨時延、丟包和信息安全等問題,V2G 充電會對電池耐久性造成不良影響。將理論研究成果進行工程化開發,以實現可復制的規模化應用具有重要現實意義。
7 總結
新能源汽車對降低交通領域的化石能源消耗和溫室氣體排放具有重要意義,已經成為全球的發展共識。本文對新能源汽車節能路徑規劃、節能車速規劃、節能充電規劃、能量管理以及相應的多任務集成優化技術進行了系統調研,深入分析并總結了現有研究問題的關鍵特征與研究方法的主要特點,指出在智能化和網聯化技術背景下,新能源汽車節能規劃與控制技術能夠有效提高能量使用效率,是當前和未來長期的研究熱點;但對動態隨機交通場景考慮不足,多任務集成與多車協同優化不夠深入,且產業化應用仍面臨較大挑戰;為滿足新能源汽車的高水平發展需求,未來的研究趨勢與重點為:1)考慮環境時變性和行為隨機性的新問題;2)運用先進預測和高效求解等手段的新算法;3)系統解決多車多任務多維度問題的新方法;4)在真實場景下可復制推廣的新應用。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
Coco薇(2016年2期)2016-03-22 02:42:52
中國工程咨詢(2016年4期)2016-02-14 07:28:28
Coco薇(2015年1期)2015-08-13 02:47:34
