考慮因素交互作用的車—車事故嚴重程度分析
2022-02-01 12:36:22張道文王朝健黎華惠
汽車安全與節能學報 2022年4期
張道文 ,王朝健,蔣 駿,黎華惠
(1.西華大學 汽車與交通學院,成都 610039,中國;2.汽車測控與安全四川省重點實驗室,成都 610039,中國;3.四川省新能源汽車智能控制與仿真測試技術工程研究中心,成都 610039,中國;4.成都工業職業技術學院,成都 610218,中國)
2020 年,中國大陸機動車導致的交通事故數達21.1 萬起,造成5.6 萬人死亡、21.4 萬人受傷和12.28億元直接財產損失[1]。交通事故可以分為車與人事故、車與二輪車或三輪車事故以及單車事故(即本車事故)、車對車(V2V)事故(以下又稱雙車事故)、多車事故。V2V 事故嚴重程度不僅取決于己方駕駛員和車輛的特征,還取決于對方駕駛員和車輛的特征[2],且V2V 事故的占比高于其他事故類型[3]。因此研究雙車事故嚴重程度的關鍵因素,以及因素的交互作用對致死事故率的影響,對預防V2V 事故和降低駕乘人員的傷亡具有重要意義。
對V2V 事故的研究主要基于Logit 模型(Logit model)、Probit 模型(Probit model)等線性模型而限制了邏輯相關變量的引入。C.Duncan 等[4]采用有序Probit 模型(ordered Probit model),研究了V2V 事故中乘用車駕駛員損傷嚴重程度的影響因素。G.A.Torr?o 等[5]采用Logit 模型發現了V2V 事故中,對方汽車的發動機排量是重要影響因素。賈雄文[3]利用二項有序Probit 模型(bivariate ordered Probit,BOP),研究了國內V2V 事故受傷嚴重程度的關鍵影響因素。隨后賈雄文等[6]利用BOP 模型,研究了道路環境因素對V2V 事故嚴重程度的影響,發現道路等級的提升會降低駕駛員的受傷程度。蔣欣國等[7]利用廣義有序Logit模型(generalized ordered Logit),研究了雙方駕駛員的危險行為對V2V 事故的影響,發現超速和其他行為同時存在時對事故后果有顯著影響。王健宇等[8]基于多項Logistic 回歸模型(multinomial Logistic regression,MNL),研究了V2V 事故嚴重程度的影響因素及機理,探索了在不同嚴重程度的交通事故中影響因素存在的差異性。一些學者研究V2V 事故時,駕駛員因素一般僅考慮了受傷更嚴重的一方駕駛員;主要基于單因素分析,沒有考慮因素的交互作用,而交通事故是多風險因素對事故傷亡的綜合效應。
針對因素交互作用對事故嚴重程度的研究,有學者利用Shapley 加和解釋(Shapley additive explanations,SHAP)結合XGBoost[9]、LightGBM[10]等模型,但這種方法只能分析2 個因素的交互效應對事故后果的影響趨勢,不能量化分析[9]。有學者提出利用N-K 模型量化多種因素的交互作用對事故后果的影響[11],但N-K模型只能解決因素之間的整體交互效應,不能分析因素具體狀態值的交互效應。有學者利用故障樹[12]、關聯規則[16]提取具有強耦合度的規則,但這些方法也不能具體量化規則對事故后果的影響程度。
Bayes 網絡(Bayesian networks,BN)模型具有高解釋度的優勢,已應用于交通安全的研究[14]。它能量化單因素以及多因素的交互作用對事故后果的影響,但多因素分析時,會面臨因素組合過多、主觀定義的組合耦合度低甚至為不可能事件等問題,而關聯規則剛好能彌補這一缺陷。
本文運用Bayes 網建立考慮風險因素交互作用的V2V 事故嚴重程度模型。定量分析關鍵影響因素、雙因素的交互作用對致死事故率的影響,結合關聯規則方法挖掘高頻率和強耦合度的規則,探究多因素交互作用下對致死事故率的影響,以期明確V2V 事故的預防重點,從而實施精準的防控策略。
1 方 法
1.1 Bayes 網絡
Bayes 網絡(BN)是一種描述變量間不確定因果關系的網絡模型,能很好地捕捉變量之間的潛在影響關系,有結構學習和參數學習2 個部分。當隨機變量有n個時,變量之間的關系可以由一個聯合概率分布表示:

式中:X1、X2、…、Xn為隨機變量;parent(Xi)為隨機變 量Xi的全部父節點集合。當(parent(Xi)=? 時,parent[Xi|parent(Xi)]是邊緣分布P(Xi)。
結構學習中,增強樸素Bayes(augmented naive Bayes,ANB)算法克服了傳統樸素Bayes 算法中因素局部獨立性的限制、應用廣泛[15]。完整數據的參數學習通常利用最大似然估計,定義如下:
P(|θ=θ0)表示參數θ的某個取值θ0與數據的擬合程度,取值越大說明θ0與數據的擬合程度越高。給定θ,數據的條件概率P(|θ)稱為θ的似然度:

令L(|θ)達到最大值時的取值θ*為參數θ的最大似然估計(maximum likelihood estimation,MLE):

1.2 關聯規則
關聯規則算法可以挖掘要素之間的內在聯系,用X≥Y表示,X為前項,Y為后項。一般有支持度和置信度2 個衡量指標。
支持度指X和Y的同時出現的概率,用support(X≥Y)表示,置信度指出現后,出現的概率,用confidence(X≥Y)=P(Y|X)表示。支持度越高表示前項出現的概率越高,置信度越高代表前項發生,后項出現的概率越高[16]。
1.3 驗證
常用的驗證方法有K折交叉驗證、接受者操作特性曲線(receiver operator characteristic,ROC 曲線)和ROC 曲線下的面積(area under curve,AUC)。K折交叉驗證將數據集劃分為K個大小相等的部分,K-1 部分用于訓練,最后K個部分用于測試,這個過程重復K次[15]。留一法(leave one out,LOO)是K折交叉驗證的極端情況,它將數據集的n-1 條數據用于訓練,最后一條數據用于測試,這個過程重復n次,驗證過程沒有隨機因素的影響,結果穩定[17]。
2 數據處理及模型建立
2.1 數據處理
(中國)國家車輛事故深度調查體系(national automobile accident in-depth investigation system,NAIS)由(中國)國家市場監督管理總局缺陷產品管理中心聯合中國8 所高校、多家交通司法鑒定中心共同建立[18]。事故數據覆蓋了中國大陸7 個地域,已有學者利用該數據庫進行了相關研究并取得了成果[19-21]。
對樣本進行以下初步篩選:
1)剔除由于研究對象為V2V 事故,需涉及行人、機動二三輪車、非機動二三輪車、V2V 和多車的事故;
2)剔除與研究無關的字段,同時剔除剩余字段中不完整的數據;
3)由于高速公路為封閉式道路管理,有別與其他道路,因此剔除涉及高速公路的案例[22];
4)刪除剩余事故中的特殊案例,例如靜止車輛由于制動失效導致的事故、車輛自燃導致的事故。最終剩下583 例事故。
2.2 變量選取
交通事故的影響因素眾多,總體可分為人、車、路和環境4 個方面。人的方面主要包括駕駛人的心理因素和生理因素,例如駕駛人的年齡、性別和狀態等因素會影響駕駛員的感知能力和反應能力;車是人的載體,車輛的類型和安全技術狀況會間接影響事故后果,而駕駛人對車輛的控制會直接影響車輛的運動狀態;道路是交通的載體,主要包括發生地點、行政等級和路面狀況等因素;環境通過影響人、車和路方面而間接影響事故的發生,一般指自然環境的因素,例如天氣狀況、事故發生的時段。
考慮以往研究的變量選取并結合NAIS 數據庫的字段特征,從人、車、路和環境4 個方面選取17 個變量(包括影響因素和事故嚴重程度)[3,6,11,27],分為過失方因素(L1-L5)、受害方因素(I1-I5)、道路因素(R1-R4)、環境因素(E1-E2)和事故嚴重程度(Sev),各變量取值及離散情況見表1。

表1 變量取值及離散情況
2.3 結構建立
運用GeNIe3.0 軟件進行結構學習和參數學習,得到V2V 事故嚴重程度分析模型的Bayes 網絡結構圖,一共包括17 個節點和29 條邊,如圖1 所示。其中:每一個節點代表一個變量,節點之間的連線代表變量之間具有直接依賴關系,如天氣狀況(E1)與路面狀況(R2)有直接依賴關系。
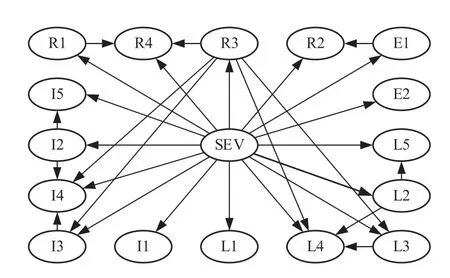
圖1 Bayes 網絡結構圖
2.4 模型驗證
利用留一法進行模型驗證,模型的準確率為81.3%,若準確率達80%,代表預測效果較好[24]。ROC 曲線下的面積(AUC)為0.81,表明算法的魯棒性較好,因此V2V 事故嚴重程度分析模型較合理。接受者操作特性曲線(ROC 曲線)和AUC 如圖2 所示。

圖2 ROC 曲線和AUC
3 推理分析
3.1 關鍵因素分析
為探究事故嚴重程度的關鍵影響因素,基于Bayes網絡構建的分析模型,輸入每個變量的各個取值狀態(對于每一個變量,其中一個取值的概率被設置為100%,同一變量的其他取值被設置為0%,例如過失方性別為男性,則女性的概率為0%),然后更新整個模型,觀察該變量的不同取值下致死事故率的變化。其中每個變量的不同取值狀態對致死事故率的最大影響幅度見表2。
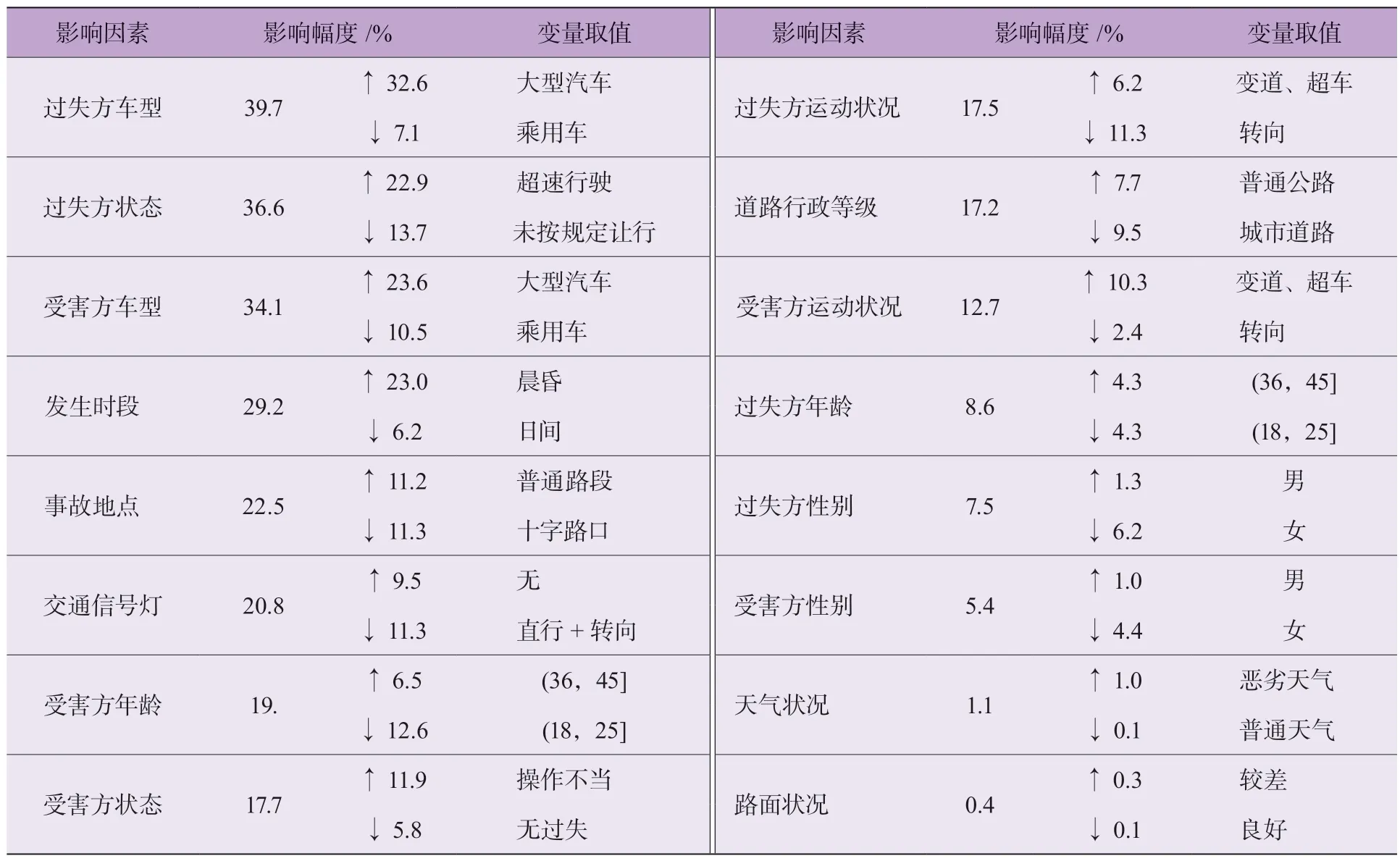
表2 各因素對致死事故率的影響幅度
“↑”代表取值對致死事故率的最大增幅;“↓”代表取值對致死事故率的最大降幅。例如過失方車型(因素L5)對致死事故率的影響幅度為39.7%,其中大型汽車因素會提高32.6%致死事故率(后文涉及的提高與降低均是相較于致死事故率的先驗概率),乘用車因素會降低7.1%致死事故率。
由表2 可知,L5、L3、I5、E2、R3、R4 等因素對致死事故率的影響幅度均超過20%,是引發致死事故的關鍵因素。過失方或受害方為大型汽車、過失方超速行駛會顯著提高致死事故率[7];調整模型發現夜間(4.5%)的致死事故率高于日間[25]。發生在晨昏的事故占比僅6%,但該時段一旦發生事故,致死事故率會提高23%,相反發生在日間的事故占比最高,但致死事故率會降低6.2%。可能是晨昏車流量小,駕駛員警惕較低,導致行駛速度較快,而日間車流量大且行車視距較好,駕駛員更加謹慎[3];普通路段和十字路口的事故占比較高,但十字路口比普通路段的致死事故率低22.5%[23];設立信號燈能降低致死事故率,設立直行+轉向交通信號燈路段比無交通信號燈路段的致死事故率低20.8%,這是因為交通信號燈對駕駛員有警示作用,能降低交通沖突程度[23]。
(36,45]歲的駕駛員會略微提高致死事故率,而(18,25]歲的駕駛員會降低致死事故率。Lee C[25]指出30 歲以下的年輕司機在碰撞中受傷程度會降低,并且(18,25]歲的青年駕駛員由于駕駛經驗不豐富,警惕性反而更高;過失方或受害方的轉向行為均會降低致死事故率,但過失方的轉向行為降低幅度更大,可能是因為過失方處于轉向時,能更好的提前發現碰撞目標,實施主動避險行為;普通公路比城市路段的致死事故率高17.2%。男性駕駛員、惡劣天氣和較差的路面狀況等因素都會提升致死事故率,但影響程度較小。
3.2 二維推理分析
為考察雙因素的聯合效應對致死事故率的影響,以致死事故率的影響幅度中最大的因素L5 與其余關鍵因素進行組合分析,觀察2 個變量的不同取值組合的致死事故率,各組合的聯合效應見圖3。其中縱坐標底部為過失方車型的變量取值,縱坐標中部為其余關鍵因素的變量取值,橫坐標為該組合的致死事故率。
由圖3 可知:因素交互作用下,因素的聯合效應顯著。例如相較于過失方為乘用車,過失方為大型汽車與其余關鍵因素的交互作用更容易引發致死事故,尤其是駕駛員處于超速行駛或處于晨昏時段,因此建議大型汽車強制裝配超速報警裝置,并且駕駛員在晨昏等光線不好的環境要提高駕駛警惕;因素的聯合效應影響高于各自邊際效應之和。例如過失方為大型汽車且發生于普通路段時,致死事故率提高的邊際效應之和為42.1%,而聯合效應之和為44.4%。
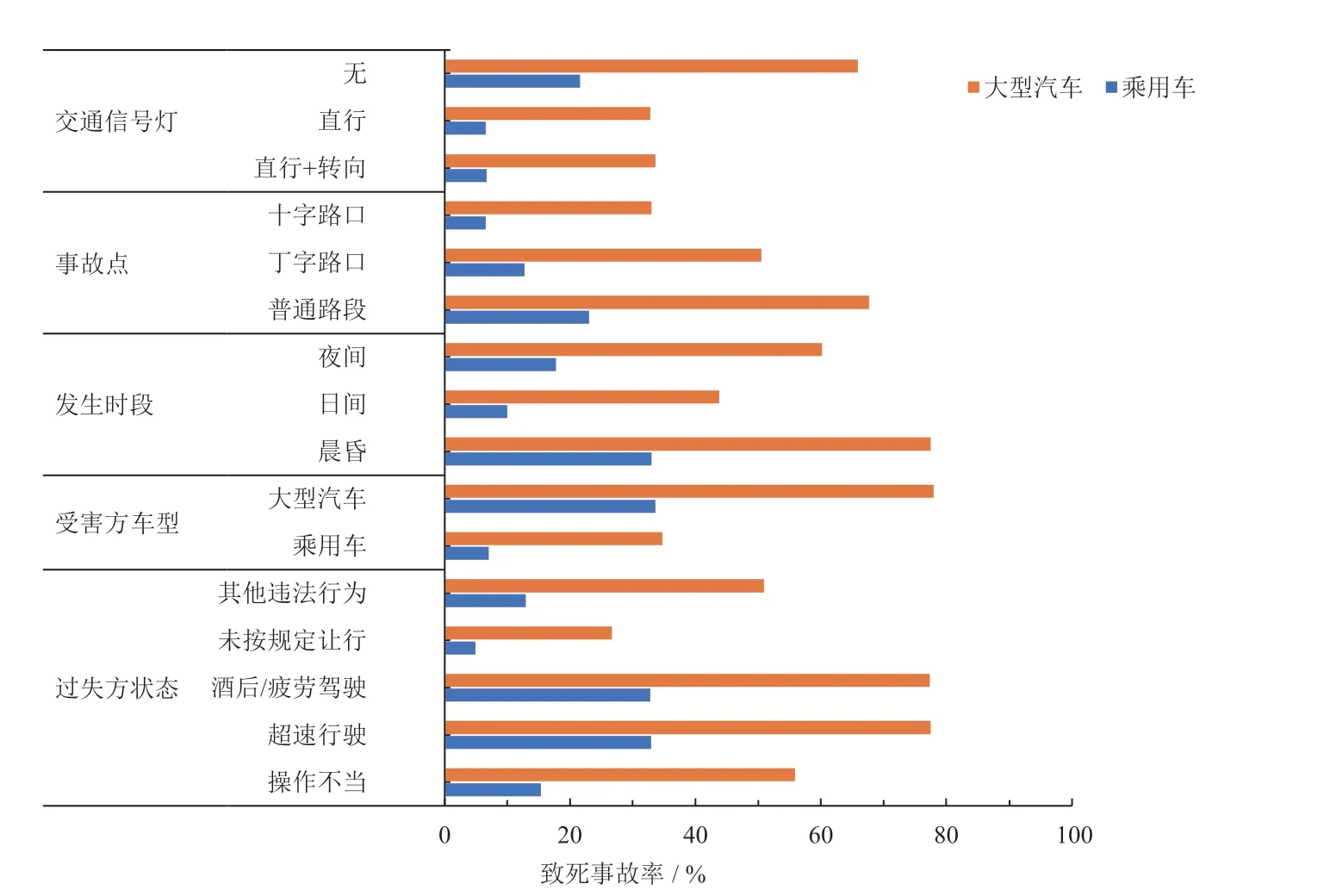
圖3 過失方車型和其余關鍵因素的聯合效應
3.3 多維推理分析
交通事故是多風險因素對事故傷亡的綜合效應,但面臨因素取值的組合過多、主觀定義的組合耦合度低甚至為不可能事件等問題。因此利用SPSS Modeler軟件的關聯規則挖掘關鍵因素中高頻率與強耦合度的規則,將關聯規則輸出的規則中各個變量的取值,作為Bayes 網絡分析模型中每個變量的輸入,計算各個規則的致死事故率的變化。為了挖掘高頻率和強耦合度的規則,設定最低支持度為20%和最低置信度為80%,剔除前后項內容相同的規則后,最終得到10 條規則見表3。
表3 可知:規則1 的支持度最高,說明該組合出現的頻率較高,但此時致死事故率會下降18.3%。這和C.Lee[25]結論類似,小型車之間的碰撞增加了非致死事故率,并且車輛在通過交叉口時的車速較低,因此降低了致死事故率[26];規則2 出現的頻率較高,會小幅度提升致死事故率;與規則2 類似的是規則5,但規則5 發生時會增加42.6%的致死事故率,這是由于受害方為大型汽車時,盡管會降低受害方駕駛員的致死率,但會顯著提高過失方駕駛員的致死率[23];規則7是唯一含夜間的高耦合規則,這種事故容易發生在無交通信號燈的普通路段,并會提高21.7%的致死事故率。這極大可能是因為夜間車流量低、無交通信號燈的警示,并且普通路段的干擾小,此時汽車的行駛速度較快,加上夜間視野差,導致發生緊急情況時駕駛員的避撞時間不足。
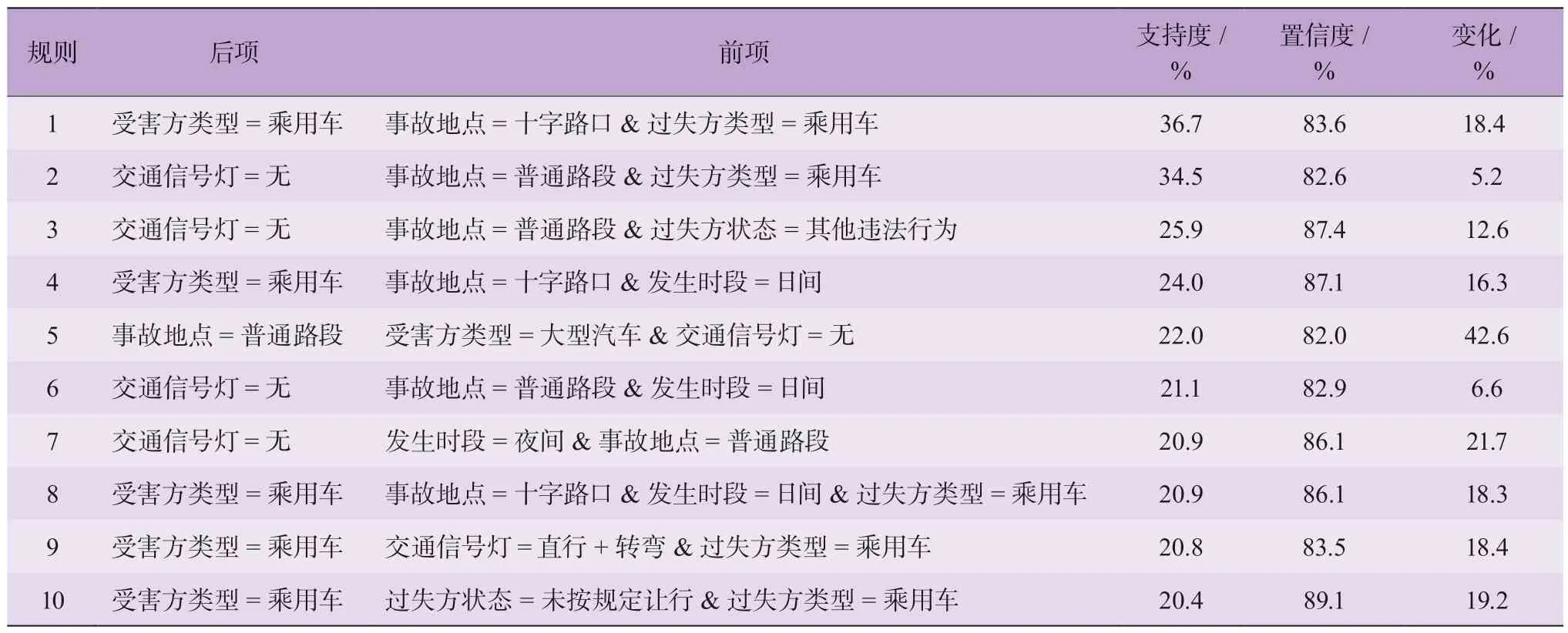
表3 高頻率與高耦合規則集對致死事故率的影響
4 結論
本文以NAIS 數據庫的雙車事故為樣本,利用Bayes 網絡和關聯規則方法,研究了V2V 事故嚴重程度的關鍵影響因素,以及關鍵因素的交互作用對致死事故率的影響。主要結論如下:
1)過失方車型、過失方狀態、受害方車型、發生時段、事故地點、交通信號燈等因素,是致死事故率的關鍵影響因素。
2)因素交互作用下,因素的聯合效應顯著,并且影響高于各自邊際效應和。過失方為大型汽車且處于超速行駛會提升55%的致死事故發生率,因此建議大型汽車強制裝配超速報警裝置;駕駛員在晨昏時段,要提高駕駛警惕。
3)在十字路口兩輛乘用車發生事故的頻率較高,但致死事故率相較于致死事故率的先驗概率會降低18.4%;大型汽車在無交通信號燈的普通路段發生事故,會提高42.6%的致死事故率。
4)數據采集的困難導致數據和字段有限,沒有充分考慮到車流量、汽車安全狀況和管理方面等因素,可能會對研究結果產生一定影響,有待進一步研究。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
汽車實用技術(2022年4期)2022-03-07 06:07:20
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
當代陜西(2021年2期)2021-03-29 07:41:24
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
中國塑料(2016年3期)2016-06-15 20:30:00
公民與法治(2016年4期)2016-05-17 04:09:26
