回轉(zhuǎn)窯焚燒設(shè)備退火溫度模糊自適應(yīng)控制技術(shù)
2022-02-08 12:20:00武存喜
工業(yè)加熱 2022年12期
武存喜
(延安職業(yè)技術(shù)學(xué)院,陜西 延安 716000)
1 引 言
回轉(zhuǎn)窯[1]作為焚燒處理的高使用率設(shè)備,對(duì)廢物料的狀態(tài)、性質(zhì)等均具有較好的適應(yīng)性,能有效破壞廢物料中的有害物質(zhì),在預(yù)防二次污染中發(fā)揮著巨大作用,促進(jìn)社會(huì)生態(tài)文明建設(shè)與綠色發(fā)展更加深入。退火溫度對(duì)于回轉(zhuǎn)窯而言是一項(xiàng)至關(guān)重要的物理參數(shù)。只有精準(zhǔn)控制回轉(zhuǎn)窯退火溫度,才能充分燃燒廢物料,降低灰渣產(chǎn)生量,使該設(shè)備發(fā)揮出最大程度的焚燒作用。隨著智能時(shí)代來臨,多數(shù)行業(yè)領(lǐng)域已邁入智能控制階段。在眾多控制手段中,模糊控制技術(shù)[2]憑借易開發(fā)、易操作等特征,不僅促進(jìn)了工業(yè)生產(chǎn)發(fā)展,還引起了學(xué)術(shù)界的高度關(guān)注。模糊控制通過充分利用語言信息與數(shù)據(jù)信息,就能實(shí)現(xiàn)繁冗且復(fù)雜的非線性控制任務(wù)[3]。我國雖不及國外著手研究模糊控制理論的時(shí)間早,但發(fā)展快、效用好,尤其在探索溫度模糊控制的技術(shù)中,取得了較高成就,并廣泛應(yīng)用于各大領(lǐng)域。
劉塵塵采用Advanced RISC Machines微處理器,建立嵌入式自適應(yīng)溫度控制系統(tǒng),解決電阻爐超調(diào)量過大、調(diào)節(jié)時(shí)間過長(zhǎng)等問題[4];錢雅楠等提出了一種小超調(diào)量、高控制精度的果蔬溫室溫度智能自適應(yīng)控制手段[5];周正等為控制木材干燥窯溫度,根據(jù)模糊理論與木材干燥模型,構(gòu)建出響應(yīng)快、能耗低的模糊自適應(yīng)滑模控制器[6]。
基于上述調(diào)節(jié)控制技術(shù)的成熟優(yōu)勢(shì),本文面向回轉(zhuǎn)窯焚燒設(shè)備,對(duì)退火溫度模糊自適應(yīng)控制技術(shù)展開針對(duì)性研究。模型采用IF-THEN語句形式作為模糊條件與控制規(guī)則,有助于為自適應(yīng)的模糊推理提供更直接的判定依據(jù);引入自適應(yīng)理論,讓模型參數(shù)根據(jù)退火溫度的非線性、時(shí)變性及分布特征,自適應(yīng)地完成學(xué)習(xí)與調(diào)整,降低模型對(duì)模糊控制規(guī)則的依賴度,提升退火溫度控制精準(zhǔn)度。
2 回轉(zhuǎn)窯焚燒設(shè)備退火溫度控制依據(jù)
回轉(zhuǎn)窯焚燒設(shè)備是焚燒技術(shù)的關(guān)鍵設(shè)備與核心環(huán)節(jié),通常呈筒狀,爐襯為窯筒內(nèi)部澆筑的耐火材料或砌筑的耐火磚,基本組成包括煙室、加料管、窯筒體、傳動(dòng)裝置等。按一定傾斜角度安置回轉(zhuǎn)窯,電機(jī)驅(qū)動(dòng)齒輪旋轉(zhuǎn)設(shè)備,讓廢物料按照進(jìn)料方向,從進(jìn)料口緩慢移動(dòng)至出料口,生成的灰渣經(jīng)過冷卻系統(tǒng)冷卻后,掉入渣斗,通過水封除渣機(jī)排出。為達(dá)成高燃盡率與底渣熔融的高處理質(zhì)量[7],焚燒時(shí)長(zhǎng)一般需保持在1~2 h,運(yùn)行溫度要維持在850~1 450 ℃。設(shè)備運(yùn)行中的工藝流程包含烘干、熱解、焚燒、燃盡等四個(gè)階段,受多方面因素影響,為獲得精準(zhǔn)的控制結(jié)果,本文以爐膛體積、物料燃燒傳遞溫度和消耗熱量為依據(jù),獲得不同時(shí)刻下的目標(biāo)退火溫度。
基于回轉(zhuǎn)窯焚燒設(shè)備結(jié)構(gòu),設(shè)定爐膛體積為Vl,則通過式(1)確定焚燒設(shè)備直徑Dh:
(1)
式中:K為長(zhǎng)徑比系數(shù);爐膛體積由物料的進(jìn)入量、熱值及容積熱負(fù)荷決定。
假設(shè)空氣與燃料的帶入熱量、燃料低位時(shí)的發(fā)熱量、焚燒物料對(duì)附近物料的傳遞熱量、高溫分解反應(yīng)過程中的消耗熱量、輔助燃料的消耗熱量分別為Qk、Qr、Qd、Qc、Qf、Gf,則t時(shí)刻下,回轉(zhuǎn)窯焚燒設(shè)備的退火目標(biāo)溫度計(jì)算公式如下所示:
(2)
式中:Qb為焚燒不徹底的損失指數(shù);cx為物料比熱容,J/(kg·℃);α為過量空氣系數(shù)[8];Vy為焚燒煙霧體積;qv為容積熱負(fù)荷。
3 退火溫度模糊自適應(yīng)控制技術(shù)實(shí)現(xiàn)
3.1 回轉(zhuǎn)窯焚燒設(shè)備退火溫度數(shù)據(jù)采集與處理
利用紅外測(cè)溫設(shè)備[9]采集瞬態(tài)響應(yīng)的退火溫度動(dòng)態(tài)變化數(shù)據(jù),由硬線實(shí)時(shí)上傳至模擬量卡件,經(jīng)工業(yè)以太網(wǎng)傳輸?shù)缴衔粰C(jī),通過分散控制系統(tǒng)的記錄與辨識(shí),得到有效的溫度數(shù)值。
為降低環(huán)境等因素對(duì)溫度數(shù)據(jù)質(zhì)量的干擾與影響,式(3)為去除采集數(shù)據(jù)中含有的隨機(jī)噪聲:
(3)
式中:Em、Em-1為采集到的第m個(gè)與第m-1個(gè)溫度值;當(dāng)采樣值Em不可用時(shí),選用采樣值Em-1;Δdmax表示連續(xù)兩個(gè)采樣值間的最大誤差。
3.2 模糊自適應(yīng)控制模型
3.2.1 模糊控制模型
常用的模糊控制模型共分為模糊化、知識(shí)庫、模糊推理及清晰化四個(gè)部分。模糊控制模型遵循的模糊條件與控制規(guī)則為IF-THEN語句。當(dāng)模糊控制模型呈兩輸入單輸出模式時(shí),若語言變量是x、y、z(模糊輸入項(xiàng)是x、y,模糊控制項(xiàng)是z),Ai、Bi、Ci(i=1,2,…,n表示語言變量序數(shù))是各變量分別在模糊論域X、Y、Z上的值,則相關(guān)模糊控制規(guī)則的表示形式如下列條件方程組所示:
(4)
由此推導(dǎo)出語言變量值A(chǔ)i、Bi、Ci之間的關(guān)系,如下所示:
μRi=μAi∩Bi→Ci(x,y,z)
(5)
式中:μ()為語句關(guān)聯(lián)。
該模型在控制過程中涉及的基本運(yùn)算操作主要有模糊化運(yùn)算、句子連接運(yùn)算、合成運(yùn)算、清晰化運(yùn)算等,各運(yùn)算操作的實(shí)現(xiàn)公式分別為
x=Ξ(x0)
(6)
(7)
z=(x⊕y)°R
(8)
z0=Λ(z)
(9)
式中:x0、z0為語言變量與控制量的精準(zhǔn)項(xiàng);Ξ為模糊運(yùn)算符號(hào);R為模糊規(guī)則集;Υ為組合運(yùn)算符號(hào);⊕、°分別為語句間的連接與合成運(yùn)算符號(hào);Λ為清晰化運(yùn)算符號(hào)。
由于得到的清晰控制輸出z0位于模糊論域Z的區(qū)間里,故采用下列線性變換公式,將其從模糊論域Z=[zmin,zmax]尺度變換至合理控制U=[umin,umax]內(nèi),得到基于合理控制范圍的控制輸出z′:
(10)
式中:k為兩控制范圍的尺度變換因子,由下式解得:
(11)
3.2.2 自適應(yīng)優(yōu)化
為避免模型在控制回轉(zhuǎn)窯焚燒設(shè)備退火溫度時(shí)太過依賴模糊控制規(guī)則,讓模型參數(shù)能夠根據(jù)退火溫度的非線性、時(shí)變性及分布特征,自適應(yīng)地完成學(xué)習(xí)與調(diào)整,引入自適應(yīng)理論[10],構(gòu)建出圖1所示的模糊自適應(yīng)控制模型。該模型以偏差、偏差變化率及目標(biāo)退火溫度為依據(jù),按照模糊推理結(jié)果,自適應(yīng)調(diào)整模型的比例增益、積分增益、微分增益等參數(shù)值,將所得輸出作為回轉(zhuǎn)窯設(shè)備的輸入項(xiàng),達(dá)成退火溫度的精準(zhǔn)控制目標(biāo)。

圖1 模糊自適應(yīng)控制模型結(jié)構(gòu)示意圖
基于偏差e與偏差變化率ec,設(shè)定模型的比例增益KP、積分增益KI參數(shù)值為輸出結(jié)果,按照式(12)進(jìn)行自適應(yīng)調(diào)整:
(12)
式中:ΔKP、ΔKI分別為比例增益與積分增益的修正值;KP0、KI0分別為對(duì)應(yīng)參數(shù)的初始值。
已知t時(shí)刻的偏差et,采用積分式得出模糊自適應(yīng)控制模型當(dāng)前的控制結(jié)果Ht:
(13)
式中:dt為微積分因子。
對(duì)于自適應(yīng)優(yōu)化的模糊控制模型,模糊控制規(guī)則也有所改進(jìn)。假設(shè)比例增益、積分增益、微分增益等參數(shù)修正值的模糊子集均是{NB,NM,NS,ZE,PS,PM,PB},集合中的7個(gè)元素分別表示負(fù)大、負(fù)中、負(fù)小、零、正小、正中、正大,則對(duì)應(yīng)參數(shù)的模糊控制規(guī)則矩陣表達(dá)式分別如式(14)~式(16)所示。
模糊控制模型參數(shù)的自適應(yīng)調(diào)整流程具體描述如下:
(1)若偏差e的絕對(duì)值較大,為避免積分增益過分飽和,控制結(jié)果超調(diào)量過大,令參數(shù)KP取值較大、微分增益參數(shù)KD取值較小、KI取值零;
(14)
(15)
(16)
(2)若偏差e的絕對(duì)值較小,為降低靜態(tài)偏差,避免產(chǎn)生振蕩現(xiàn)象,令參數(shù)KP與KI取值較大,KD取值為變化率ec的相反數(shù);
(3)若偏差e與變化率ec的絕對(duì)值既不過大,也非較小,為確保響應(yīng)速度,降低超調(diào)量,令參數(shù)KP的取值較小,另外兩參數(shù)取值居中。
4 仿真測(cè)試
4.1 參數(shù)設(shè)置
按照表1所示參數(shù)值合理設(shè)置回轉(zhuǎn)窯焚燒設(shè)備與控制模型,充分發(fā)揮兩者的性能與作用,減小設(shè)備與模型本身對(duì)退火溫度控制效果的負(fù)面影響,使測(cè)試數(shù)據(jù)更具可靠性與說服力。
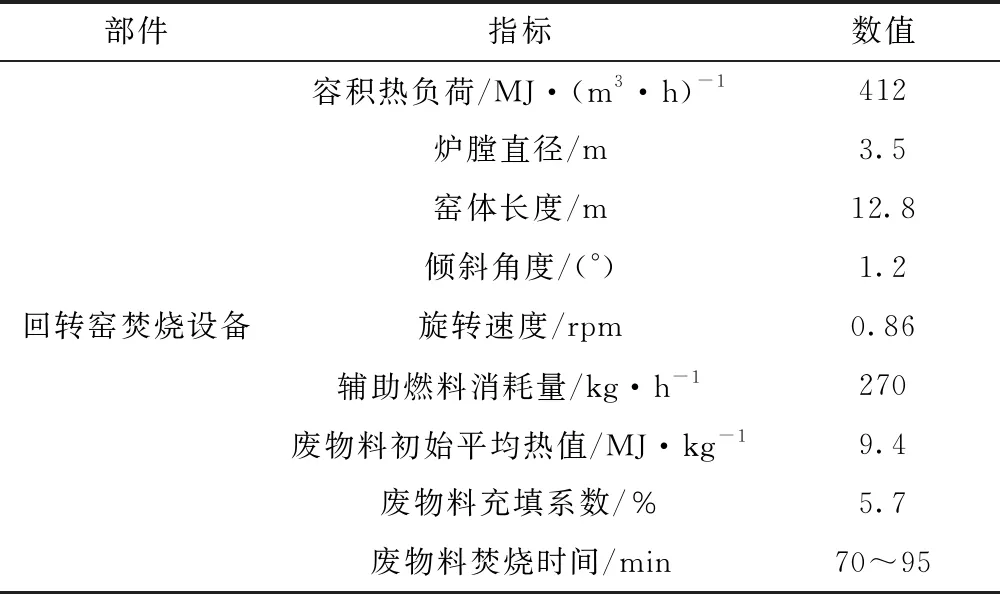
表1 回轉(zhuǎn)窯焚燒設(shè)備與控制模型主要參數(shù)
4.2 結(jié)果與分析
將本文模型的控制效果與嵌入式控制系統(tǒng)(文獻(xiàn)[4])、智能控制方法(文獻(xiàn)[5])、滑模控制器(文獻(xiàn)[6])等三種控制方法作對(duì)比,驗(yàn)證所建模型的溫控準(zhǔn)確性與免疫性。
4.2.1 準(zhǔn)確性分析
采用Simulation of Urban Mobility仿真軟件[11]模擬回轉(zhuǎn)窯焚燒設(shè)備退火溫度的控制過程,仿真曲線結(jié)果如圖2所示。根據(jù)升溫、恒溫、降溫不同階段,可以看出:四種方法均在短時(shí)間內(nèi)就進(jìn)入了平穩(wěn)狀態(tài),且未產(chǎn)生超調(diào)現(xiàn)象,在一定程度上有效減小了能耗;不同溫度控制階段的波動(dòng)幅度與偏差均較小,能使回轉(zhuǎn)窯焚燒設(shè)備的退火工藝需求得到很好的滿足;各方法控制溫度與期望溫度的高擬合程度說明,本文方法與對(duì)比方法均具備較強(qiáng)的退火溫度追蹤能力,可投入實(shí)際應(yīng)用。

圖2 不同控制方法的準(zhǔn)確性仿真示意圖
4.2.2 模糊自適應(yīng)控制模型的抗擾動(dòng)能力分析
實(shí)際的生產(chǎn)環(huán)境中有諸多不可避免的干擾,回轉(zhuǎn)窯焚燒設(shè)備的運(yùn)行工況也存在一定變化,故基于回轉(zhuǎn)窯退火溫度的恒溫狀態(tài),在第80 min手動(dòng)添加一個(gè)幅值為3%的干擾,模擬退火溫度控制的失配情況,如圖3所示。

圖3 不同控制方法的抗擾動(dòng)性仿真示意圖
從圖3中各方法對(duì)退火溫度的控制仿真結(jié)果可以看出:受到干擾后,本文模型以極小的超調(diào)量,快速恢復(fù)穩(wěn)定狀態(tài),且未產(chǎn)生穩(wěn)態(tài)誤差;而其他方法不僅波動(dòng)較大,振蕩現(xiàn)象明顯,而且需要花費(fèi)較長(zhǎng)時(shí)間才能逐漸還原為先前的穩(wěn)定狀態(tài),超調(diào)量也相對(duì)更大。該測(cè)試結(jié)論說明,本文模型根據(jù)回轉(zhuǎn)窯焚燒設(shè)備退火溫度的計(jì)算方式與降噪處理過的退火溫度動(dòng)態(tài)變化數(shù)據(jù),通過模糊化運(yùn)算等基本運(yùn)算操作與模糊推理,自適應(yīng)調(diào)整模型的比例增益、積分增益、微分增益等參數(shù)值,對(duì)擾動(dòng)具有較好的魯棒性,即便是退火溫度有所改變,也依舊能一直保持良好的平穩(wěn)控制狀態(tài)。
4.2.3 模糊自適應(yīng)控制模型的滯后性抑制能力分析
回轉(zhuǎn)窯焚燒設(shè)備通常存在一定的滯后性,故以回轉(zhuǎn)窯退火溫度的恒溫狀態(tài)為例,設(shè)定空燃比值是10.58,令設(shè)備在運(yùn)行至第93 min時(shí)出現(xiàn)顯著的滯后現(xiàn)象,得到圖4所示的不同方法滯后性抑制效果。
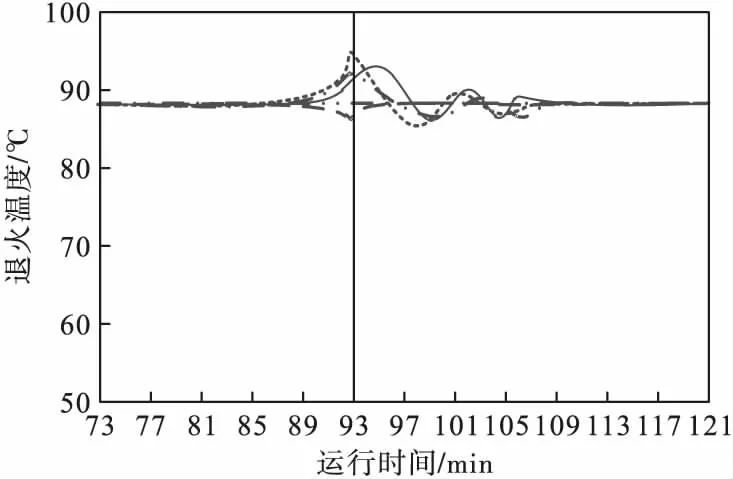
圖4 不同控制方法的抗滯后性仿真示意圖
綜合各方法的輸出曲線走勢(shì)可以看出:對(duì)比方法抑制回轉(zhuǎn)窯焚燒設(shè)備的滯后性時(shí),所需時(shí)間較長(zhǎng),在發(fā)生滯后現(xiàn)象后,曲線波動(dòng)幅度與超調(diào)量均較大;而本文模型不僅靜態(tài)偏差為零,始終沒有出現(xiàn)超調(diào)現(xiàn)象,而且曲線振蕩較小,響應(yīng)迅速,抑制用時(shí)更短。綜上所述,本文模型根據(jù)退火溫度的非線性、時(shí)變性及分布特征,以偏差與偏差變化率為依據(jù),自適應(yīng)地完成參數(shù)學(xué)習(xí)與調(diào)整,通過加強(qiáng)自適應(yīng)能力,賦予模型較強(qiáng)的穩(wěn)定性與抑制滯后性能力,使其完全能滿足回轉(zhuǎn)窯焚燒現(xiàn)場(chǎng)實(shí)時(shí)、精準(zhǔn)的控制需求。
5 結(jié) 論
由社會(huì)生產(chǎn)與日常生活產(chǎn)生的廢物料大肆污染著人們賴以生存的環(huán)境,焚燒作為一項(xiàng)重要的廢物料處理技術(shù),不斷加深著相關(guān)設(shè)備在焚化工作中的普及度,其中以回轉(zhuǎn)窯設(shè)備的應(yīng)用效果最為顯著,但該設(shè)備正處于起步階段,仍存在諸多關(guān)鍵技術(shù)有待設(shè)計(jì)與改進(jìn)。大量生成的廢物料對(duì)整體處理水平提出了新的挑戰(zhàn)高度,因此,為促進(jìn)焚燒事業(yè)進(jìn)步,推動(dòng)回轉(zhuǎn)窯焚燒設(shè)備發(fā)展,實(shí)現(xiàn)自動(dòng)化、智能化,提出退火溫度模糊自適應(yīng)控制技術(shù),提升焚燒處理效率,確保環(huán)境可持續(xù)發(fā)展。應(yīng)繼續(xù)針對(duì)控制技術(shù)的不足展開探討,拓展應(yīng)用前景與發(fā)展空間,比如:面向退火溫度的強(qiáng)耦合等組合干擾因素,分析模型的控制效果與抑制能力;將模型在具體的工程實(shí)踐中進(jìn)行推廣、應(yīng)用,根據(jù)設(shè)備的實(shí)際焚燒工況,做進(jìn)一步探索與研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
工業(yè)設(shè)計(jì)(2016年12期)2016-04-16 02:52:00
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
設(shè)備管理與維修(2015年12期)2015-04-09 06:57:00