車路協同下基于間隙理論的交叉口智能控制策略 *
2022-02-10 01:44:38潘福全張麗霞楊金順楊曉霞
重慶交通大學學報(自然科學版) 2022年1期
關鍵詞:智能
潘福全,張 游,張麗霞,楊金順,楊曉霞
(青島理工大學 機械與汽車工程學院,山東 青島 266520)
0 引 言
自交通指揮信號燈設計出現以來,世界上道路交叉口普遍用該種信號燈來對交通流進行管控,“紅燈停,綠燈行”的交叉口通行觀念也早已深入人心。隨著車路協同與智能駕駛技術的出現,傳統的交通控制方式已不再適應智能交通時代的發展。信號燈控制系統在常年應用過程中也逐漸暴露出一些問題與弊端,主要體現在以下兩個方面。
1)信號配時固定化。目前我國大多數信號燈控制系統運行方案都是按照一定規律進行運作的,當道路車流量突增時,現有信號燈控制模式不能及時有效地調配車流,無法適應實際通行需求,且存在部分車道在綠燈時間無車通行,出現“多等少”或空道占時現象,造成不必要的出行延誤[1]。
2)易受外界因素影響。當遇大霧、暴雨等惡劣天氣或后方小型車輛遇到前方大型車輛遮擋視野等時,信號燈系統無法向待行車輛及時準確地傳達信息指令。
隨著大數據、云計算、5G、人工智能等前沿技術向各個行業不斷滲透,交通領域也迎來了全面深化變革,這些技術將有力推動智慧交通實現數字化、網聯化、智能化的升級[2]。在智能交通基礎設施布局建設完備條件下,車路協同技術將使道路上的車輛與周圍環境緊密融合,通過運用一系列車載傳感器等先進的電子設備實時感知道路狀態,并將有效信息傳遞給ITS(intelligent transportation system)控制中心和車載控制單元,從而實現車與車、車與路、車與人、車與云的實時信息交互,為駕駛出行提供更加便捷、高效、安全的服務[3]。在這樣一種高度智能化的交通生態體系中[4],對出行者困擾已久的交通擁堵問題勢必會得到一定緩解。而道路交叉口作為最容易產生延誤與擁堵的地點,其控制系統的變革也勢在必行。
間隙理論基本思想是通過預先調整跟馳車輛之間的行車間距,使得沖突方向車輛能從該間隙中安全穿過,從而實現不停車通過交叉口的目的[5]。目前,國內外相關學者基于該理論對車路協同環境下的交叉口控制方法進行了大量研究。ZHANG Yi等[6]設計了一種車聯網環境下基于交通信號和路況狀態的行車速度引導方法,并開發了單車速度引導模型和多車協同速度引導模型,以減少交叉口處的行車延誤與停車次數,提高交通控制效率;鹿應榮等[7]提出了一種車聯網環境下不改變交叉口原有信號配時的車速控制策略,實現車輛高效平滑地通過道路交叉口,并在雙向兩車道的十字交叉口進行了模擬仿真,結果表明該速度控制策略能有效降低車輛通過路口的平均行程時間;劉歡等[8]對車路協同環境下網聯車輛通過交叉口時勻速、加速、減速、跟馳這4種情況分別進行了分析,提出了不停車輛通過交叉口的速度引導數學模型,并基于VISSIM進行了仿真驗證,結果表明該速度引導策略可大幅降低車輛延誤時間,能夠提高交叉口通行效率;R.TACHET等[9]提出的基于間隙控制的交叉口管理系統SIs(slot-based intersections)作為未來城市的智能交通基礎設施,并在構建的框架內將其與交通燈系統控制性能進行對比,結果表明SIs系統能實現交叉口通行能力翻倍,可顯著降低延誤;M.AMIRGHOLY等[10]提出一種自主通信車輛協同控制策略,使交叉口處各向車隊間的車頭時距能滿足交叉方向上的車隊安全穿行,并構建了智能交叉口交通優化控制隨機分析模型,驗證表明該策略能夠使交叉口通行能力提高138%;柴琳果等[11]在SIs間隙控制方法的基礎上進行了改進優化,利用LOOSE(location optimization on sequence evaluation)和COMPACT(cooperative optimization method for previous allocation comparatively transforming)算法對即將進入交叉口的車輛狀態進行計算分析,并做出對應的車輛控制決策,從而使交通流在無需減速停車的情況下能安全通過交叉口,該方法不僅能提高通行效率,而且適用性更加廣泛;常玉林等[12]在車聯網環境下,提出了基于間隙優化的無信號交叉口控制方法,以次路車能順利穿越車流量較大的主路為目標構建了相應的控制模型,并驗證該方法可提高交叉口通行效率,減少主路車流延誤時間。
上述基于間隙理論的交叉口控制研究多是解決車輛的通行時間沖突,對交叉口內部的沖突點分析較為缺乏。筆者以典型十字型交叉口作為研究對象,基于間隙理論對交叉口沖突消解問題進行深入分析,提出一種車路協同環境下的交叉口智能控制策略,旨在使交叉口各方向車輛可依次交替穿插通過各沖突點,實現不停車通過交叉口,減少由交通控制裝置所引起的固定延誤,提高通行效率。
1 問題描述
傳統信號燈交叉口控制系統是通過“斷面式”的時間分離,使相互沖突的交通流在不同時間區段分批次通過交叉口,這種控制方法在一定程度上造成了通行時間浪費,增加車輛行車延誤。實際上,交叉口車流沖突僅僅存在于局部的沖突點區域內,若采用一種“流體式”的時間分離方法,即沖突車流按照秩序依次交替穿插通過沖突點,不僅可保證行車安全,而且能大幅提升交叉口通行效率。
在車路協同環境下,交叉口遠程控制中心可通過信息感知和智能決策對沖突車流進行協調管控。基于間隙理論的交叉口智能控制理念如圖1。當主次路車輛進入交叉口控制區域時,各向車輛均提前調整當前行車狀態,增大或縮小與前車之間距離以達到最優行車間隙Ui和U′j,從而滿足主次路車輛在無碰撞條件下不停車通過交叉口的通行需求。

圖1 問題描述宏觀示意Fig. 1 Macro diagram of the problem description
基于該控制理念,主次路車輛在沖突點區域的通行演繹如圖2。圖2中:當主路Ⅰ號車完全駛離沖突點區域時,次路Ⅱ號車開始進入沖突點區域;當次路Ⅱ號車完全駛離沖突點區域時,主路Ⅲ號車開始進入沖突點區域,即主次路車輛交替穿插通過沖突點區域,實現交叉口沖突消解。

圖2 問題描述微觀示意Fig. 2 Microscopic diagram of the problem description
2 交叉口智能控制系統設計
2.1 前提假設
1)道路交通實現“聰明的車”和“智慧的路”,車載單元與路側單元等基礎硬件設施布局完備,數據信息傳輸速度與精準度、信號覆蓋范圍、抗干擾能力等滿足要求。
2)交叉口控制中心具有強大的信息分析處理能力,能及時準確做出決策判斷。
3)道路為機動車專用通道,不存在非機動車輛與行人等干擾問題。
4)交叉口通行的車輛類型為普通小型汽車,暫不考慮大中型客貨運車、公交車等。
5)交叉口路段各功能區長度范圍合適,車輛能在各功能區內完成相應的駕駛操作。
6)車輛在進入交叉口前后不允許進行合流與分流,即各向車輛均按照預設行車軌跡在相應的獨立車道行駛。
7)車輛在交叉口通行過程中,均是沿各車道中心線行駛,且左轉車輛交叉口內行車軌跡為1/4圓弧[13]。
2.2 路段功能區劃分
按照該控制系統設計方案,道路交叉口附近不同距離路段被劃分為不同功能區。車路協同環境下道路交叉口各路段的信號控制功能區與傳統意義上的交叉口功能區不同,其存在意義是為了對進入或即將進入交叉口的車輛進行實時管控[14]。根據功能與用途不同,將交叉口附近各路段劃分為變道區、調控區、緩沖區和穿行區這4個部分,如圖3。在不同路段區域范圍內,車載單元、路側單元與交叉口控制中心各自執行相應的信息交互,實現智能化、精細化交通管控。
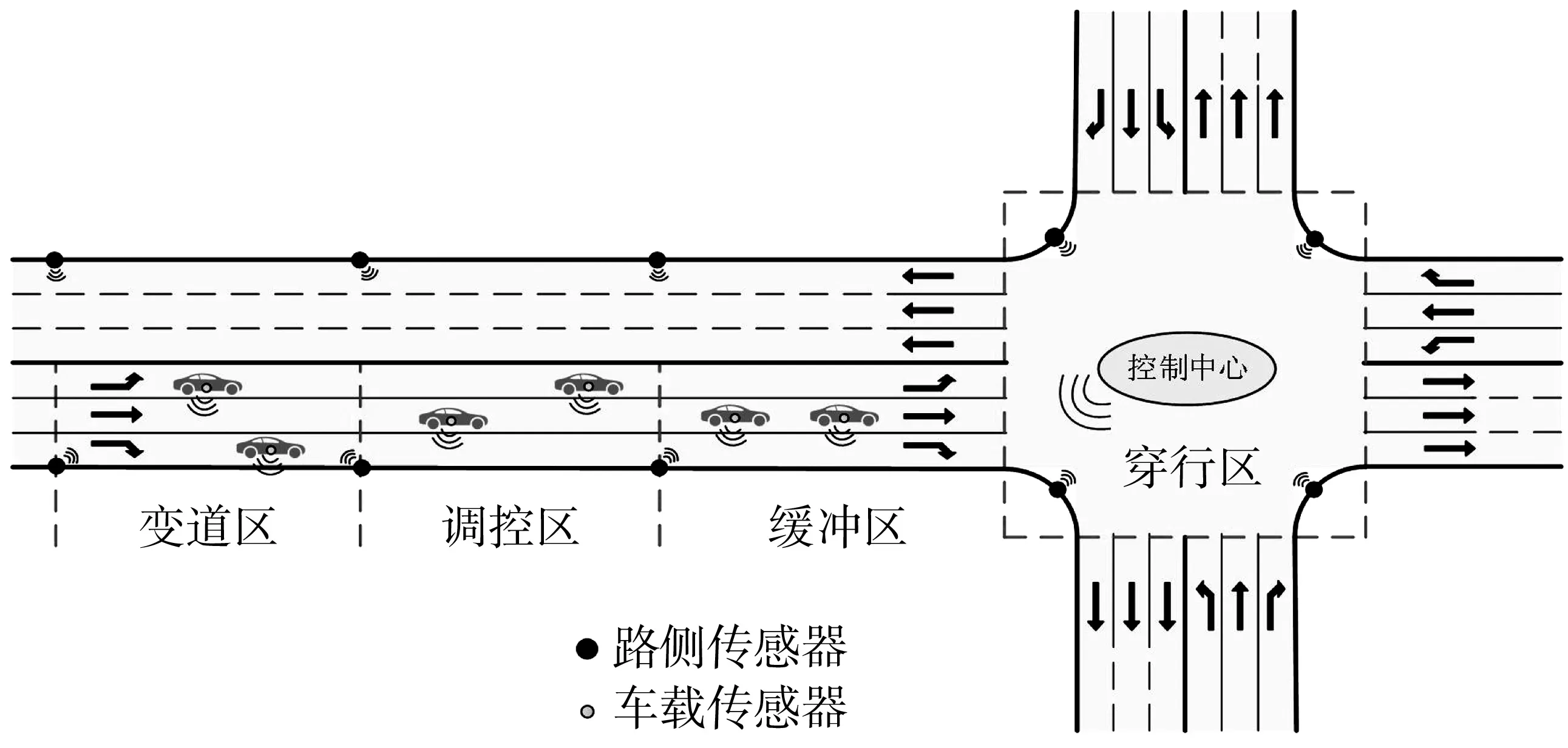
圖3 車路協同環境下交叉口路段功能區Fig. 3 Functional area of intersection under vehicle-infrastructurecooperative environment
2.2.1 變道區
在此路段內各車輛按照行進方向提前變道至對應的導向車道;路側傳感器對本區各車道待通行車輛的行進信息進行實時監測,并將檢測到的各車道交通相關數據發送至交叉口控制中心。
2.2.2 調控區
待通行車輛在此區段內接收來自交叉口控制中心發布的指令信號;車輛控制單元在接收到指令后調整當前行車速度,控制與前方車輛之間的行車間距至最優間隙,以滿足相互沖突的車輛交替穿插通過交叉口沖突點的條件。
2.2.3 緩沖區
車輛進入緩沖區后均已達到控制中心指令要求的行車狀態,并以當前狀態勻速行進。
2.2.4 穿行區
車輛以允許的最優速度進入交叉口,按照控制中心指令實時調整行車狀態,依次通過行駛路徑上的各個沖突點,完成交替穿插通行。
2.3 控制策略
在車路協同環境下,道路上的行駛車輛通過車載傳感器感知周邊局部環境狀況,獲得道路上其他車輛的位置、駛向等信息,并通過自身車載單元向外界發送本車的各項運動信息[15]。路側傳感器可監測道路安全狀況、路面濕滑狀態等,同時接收局部區域內各個車載單元發送的動態信息,檢測道路各車道的車流量、車道占有率、及車輛行車軌跡等道路信息[16]。基于上述兩個模塊采集到的交通數據信息,控制中心進行數據處理分析并做出決策判斷。
當車輛駛入交叉口控制區域時,控制中心根據車輛預設行車軌跡,判斷其在交叉口穿行區內是否存在交通沖突。若無沖突,位于調控區的車輛按照控制中心指令快速行進,在無沖突干擾條件下安全通過交叉口。若存在沖突,控制中心識別確認出沖突點位置,并計算各沖突點對應的最優行車間隙,車輛根據第一個沖突點最優行車間隙在調控區內調整當前行車狀態,完成與前車之間的距離控制,并保持該狀態駛入穿行區。車輛每通過一個沖突點,對行車間隙進行一次調整,直至通過穿行區內所有沖突點。圖4為系統控制流程;圖5為車輛調控過程。
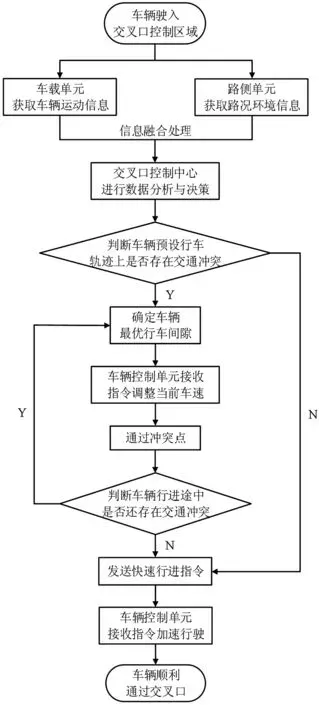
圖4 系統控制流程Fig. 4 System control flow chart

圖5 車輛調控過程Fig. 5 Vehicle control process
3 控制模型
3.1 行車間隙控制模型
選取較為典型的雙向六車道十字型交叉口進行分析。以交叉口中心點O為坐標軸原點建立直角坐標系,如圖6。
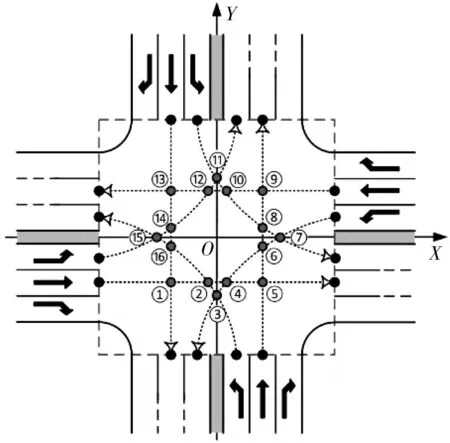
圖6 雙向六車道十字型交叉口沖突示意Fig. 6 Illustration of the conflict at two-way six-lane intersection
根據車輛行駛軌跡不同,可以把圖6中的16個沖突點分為3類:
筆者分別以①、②、③為例,對直行和左轉車輛經過3種類型沖突點處最優行車間隙進行分析。假設沖突點上的車輛通過順序為第j輛車、第i輛車、第j+1輛車、第i+1輛車,如圖7。
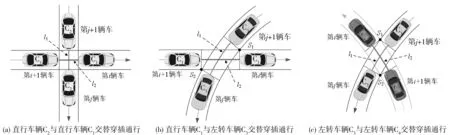
圖7 沖突車輛交替穿插通行示意Fig. 7 Schematic diagram of alternately intenspersing traffic of conflicting vehicles
車輛交替穿插通過沖突點的次序為:當前一輛車完全駛離沖突點區域時,后車恰好開始進入沖突點區域。在車輛行駛過程中為保持行車間隙不變,同一駛向的車輛在通過沖突點前速度相同,即vj=vj+1,vi=vi+1。
行車間隙控制模型目標函數為車輛交替穿插通過沖突點時的安全行車間隙最小,其表達如式(1)、式(2):
(1)
(2)
式中:Ui-(j+1)為第i輛車通過沖突點時,第j+1輛車和前車(即第j輛車)之間的行車間隙,m;U(j+1)-(i+1)為第j+1輛車穿插通過沖突點時,第i+1輛車和前車(即第i輛車)之間的行車間隙,m;vi為第i輛車通過沖突點時的行駛速度,m/s;l1為沖突點區域對j方向車輛的作用距離,m;l2為沖突點區域對i方向車輛的作用距離,m;s為車輛長度,s=5 m。
行車間隙控制模型的約束條件如式(3)~式(5):
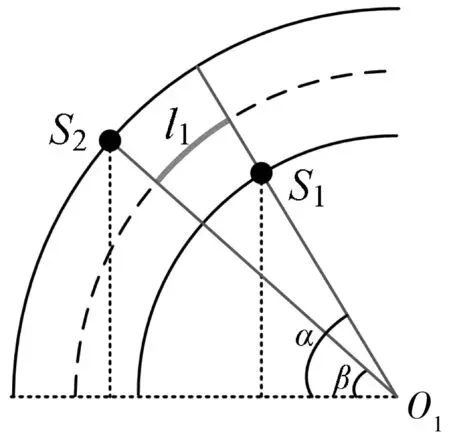
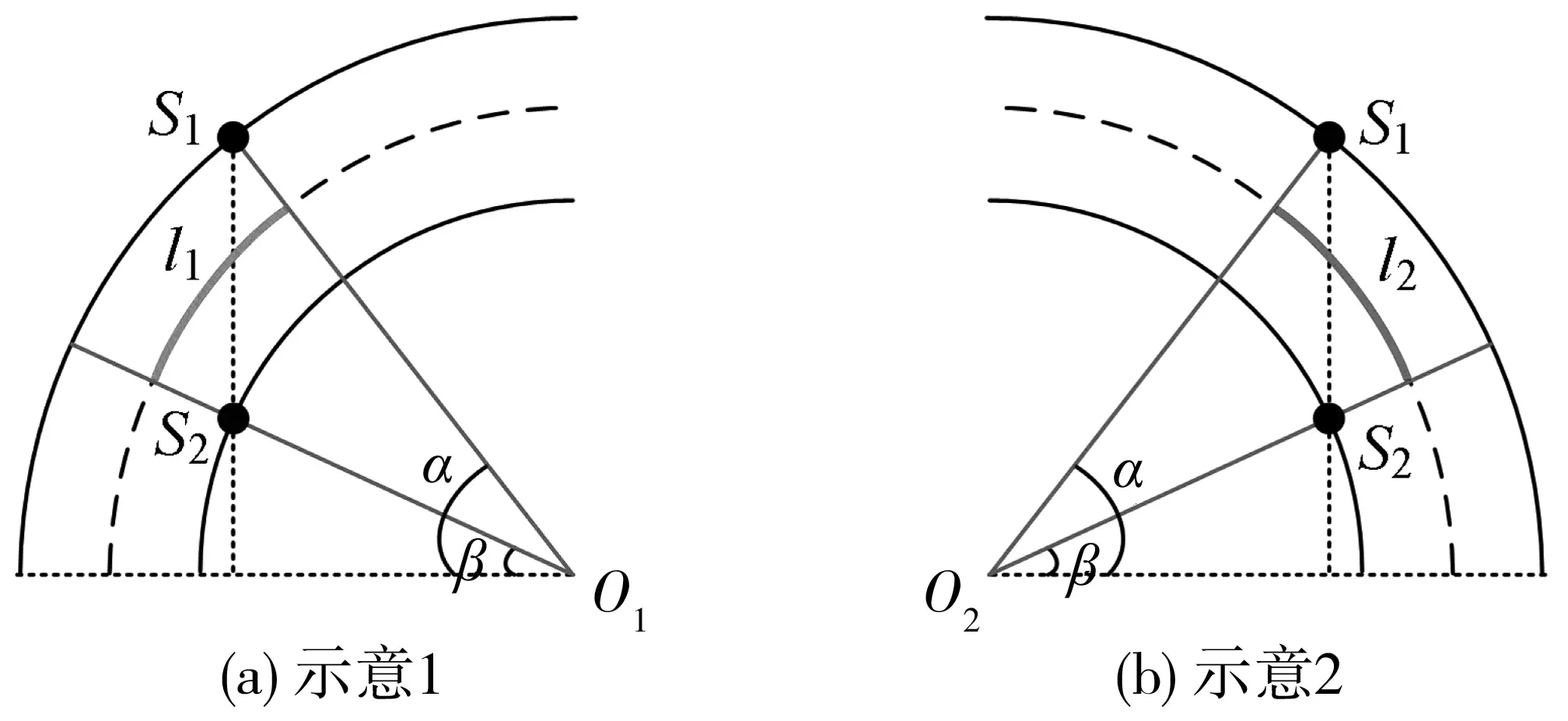
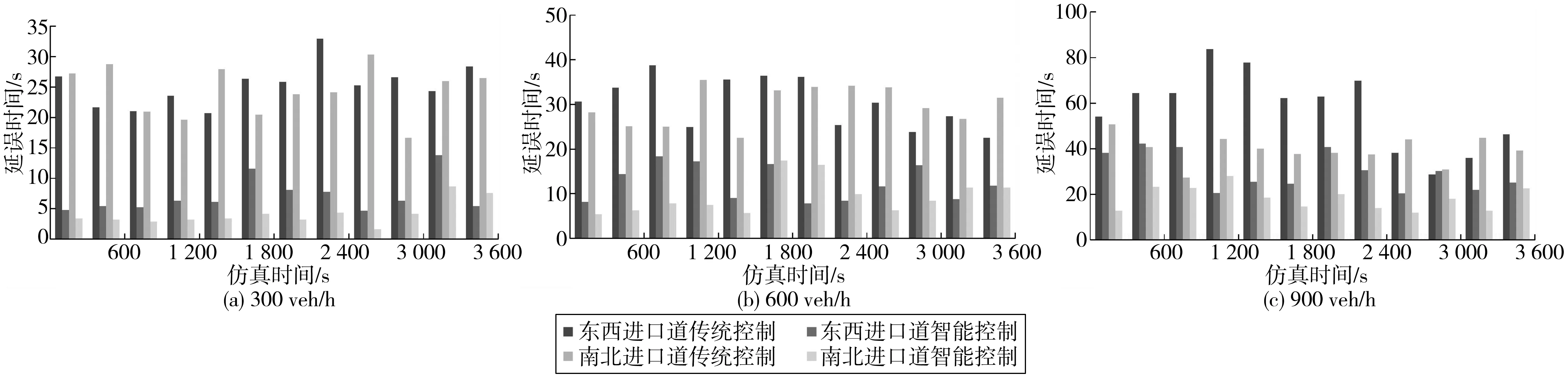
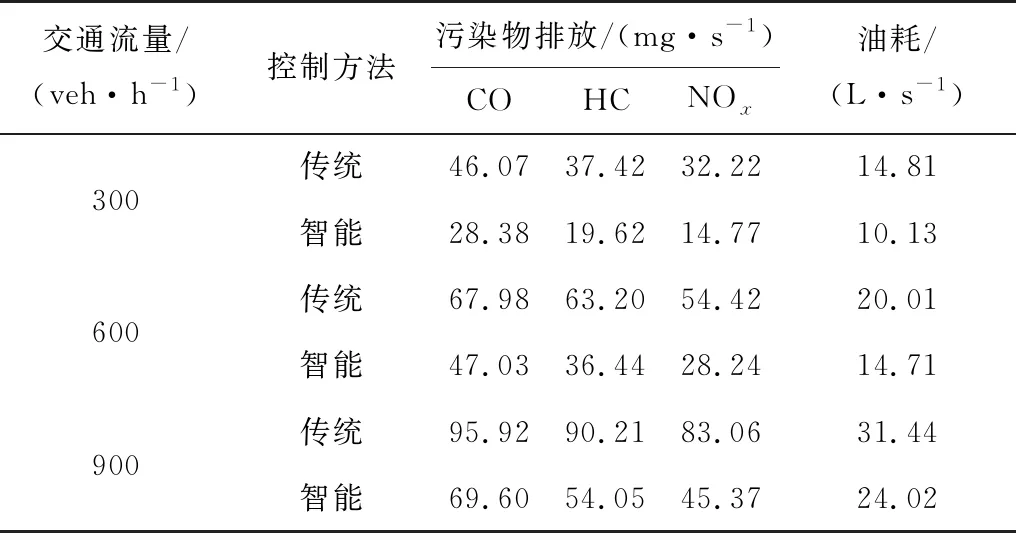
0≤v直 (3) 0≤v左 (4) (5) 式中:v直、v左分別為直行和左轉車輛在交叉口控制區域內的行駛速度,m/s;v限為交叉口路段車輛最高限速,m/s;k為道路狀況、車輛技術狀況及環境因素等影響車輛安全行駛的綜合系數;g為重力加速度,m/s2;μmax為道路路面的最大靜摩擦系數;r為左轉車輛的轉彎半徑,m。 3.1.1 直行與直行沖突點 沖突點處的車輛通行示意如圖7(a),則有式(6): l1=l2=w+2d (6) 式中:w為車輛寬度,m;d為車輛側向凈空寬度,m。 3.1.2 直行與左轉沖突點 沖突點處的車輛通行示意見圖7(b)。結合圖6所建坐標系可得碰撞點S1、S2坐標: 沖突區域作用距離微觀示意如圖8。通過幾何計算可得式(7)~式(10): (7) (8) (9) (10) 式中:l為道路車道的寬度,m;α和β分別為轉彎車輛沖突區邊界點與轉彎圓心的夾角,(°)。 圖8 沖突區域作用距離微觀示意Fig. 8 Microscopic diagram of conflict zone action distance 3.1.3 左轉與左轉沖突點 沖突點處的車輛通行示意見圖7(c)。結合圖6所建坐標系可求得碰撞點S1、S2坐標: 沖突區域作用距離微觀示意如圖9。通過幾何計算可得式(11)~式(13): (11) (12) (13) 通過沖突區域作用距離分析,可得式(14)~(19): (14) (15) (16) (17) (18) (19) 式中:UW直-N直、UN直-W直分別為X、Y方向直行車輛交替穿插通過沖突點時的最優行車間隙,m;UW直-E左、UE左-W直分別為X、Y方向直行和左轉車輛交替穿插通過沖突點時的最優行車間隙,m;US左-E左、UE左-S左分別為X、Y方向左轉車輛交替穿插通過沖突點時的最優行車間隙,m;vN直、vW直、vE左、vS左分別為Z方向上直行或左轉車輛通過沖突點時的行駛速度,m/s。 圖9 沖突區域作用距離微觀示意Fig. 9 Microscopic diagram of conflict zone action distance 交叉口控制中心根據預先感知的車輛行駛狀態信息分析預測交叉口車流沖突,運用行車間隙控制模型實時進行車輛通行間隙運算,并通過車輛狀態動態調整的方式使車輛之間達到最優行車間隙,從而實現交叉口的智能控制。 3.2.1 調控區內的車輛狀態調整 車流在經過交叉口時一般具有明顯的車隊特征[17],即相沖突的兩路車流均是以車隊形式交替穿插通過沖突點的。當某進口道有一股車流W進入到交叉口控制區域時,控制中心將其分為若干個連續的子車隊W1,W2,…,Wm,并以子車隊為單位進行車輛狀態調整。其中:每個子車隊中所有車輛在交叉口穿行區內遇到的沖突狀況相同。 如Wk子車隊中包含n輛車,當車隊中車輛進入到交叉口調控區路段后,需將車輛從當前的行駛狀態A調整至目標狀態B,使車輛與前車之間形成最優行車間隙。目標狀態包括車輛位置、速度、加速度、調整時間和與前車的行車間隙,調整過程如下: 其中:xai、vai、aai、tai、uai分別為子車隊第i(i=1,2,…,m)輛車在交叉口調控區的初始位置、行駛速度、設定加速度、進入調控區時間、與前車的行車間隙;xbi、vb、ub分別為車輛目標狀態下在交叉口調控區的位置、目標速度、目標最優行車間隙;tbi為完成狀態調整后的時間。 在目標狀態下屬于同一子車隊中的車輛均保持相同最優行車間隙勻速行進,故加速度為0。視車輛在本階段狀態調整中做勻加/減速行駛,則車輛狀態調整時間Δti如式(20): (20) 因車輛需要在交叉口調控區長度范圍內完成狀態調整,故狀態調整時間的約束條件如式(21): (21) 式中:l調控為交叉口調控區長度,m。 3.2.2 穿行區內的車輛狀態調整 當Wk子車隊中車輛在調控區內完成狀態調整,并保持一定狀態通過穿行區內的第一個沖突點后,由于后續沖突點上車輛行駛狀況有所改變,故需對子車隊中車輛的行駛狀態繼續進行微調,調整過程如下: 其中:B為上一階段的目標狀態,亦為本階段車輛行駛的初始狀態;C為車輛調整的過程狀態;D為車輛調整的目標狀態。vd、ub分別為本階段狀態調整時的初始速度和初始行車間隙;vci、aci、uci分別為第i輛車狀態調整過程中的速度、加速度和行車間隙;vd為狀態調整的目標速度;ud為狀態調整的目標行車間隙,即車輛通過下一個沖突點時與前車之間最優行車間隙。 視車輛在本階段狀態調整中同樣做勻加/減速行駛,則車輛狀態調整時間Δt′i如式(22): (22) 式中:v0為車輛的初始速度。 此階段車輛需在到達下一個沖突點前完成狀態調整,故狀態調整時間約束條件如式(23): (23) 式中:l沖-沖為車輛行駛路徑上兩沖突點之間距離。 在Vissim仿真環境中構建雙向六車道十字交叉口,通過MATLAB調用COM接口[18-19],將筆者提出的控制方法與傳統信號燈控制進行對比分析。信號燈控制方法采用二相位定時信號控制,周期時間T=100 s,其中各相位綠燈時長45 s,綠燈間隔5 s,車輛跟馳最小安全距離設為5 m。車路協環境下的交叉口路段控制區域范圍設定為700 m,其中變道區長度為100 m,調控區為400 m,緩沖區為200 m。交叉口各方向進口道均為1左轉、1直行和1右轉,每條車道寬為3.5 m,左轉車輛轉彎半徑為15.75 m。道路最高限速60 km/h,最低限速10 km/h。仿真預熱時間600 s,仿真時長3 600 s。 仿真中設定東西進口道左轉、直行、右轉交通流量分配比例為3∶5∶2,南北進口道左轉、直行、右轉交通流量分配比例為4∶3∶3,分別對不同交通流量下兩種方法的控制效果進行仿真評價。 4.1.1 車輛行程時間 圖10為不同交通流量下東西進口道和南北進口道車輛行程時間對比結果。當交通流量分別為300、600、900 veh/h時,東西進口道車輛行程時間分別縮短44.47%、38.19%、35.07%,南北進口道車輛行程時間分別縮短44.15%、40.53%、35.57%。由于智能控制下交叉口車輛無需怠速停車,故通過交叉口行程時間得到顯著縮短;車輛一直處于行駛狀態,故智能控制下車輛行程時間波動也較小。 4.1.2 車輛延誤時間 東西進口道和南北進口道車輛平均延誤時間對比結果見圖11。當交通流量為300 veh/h時,傳統控制下的車輛在一個信號燈周期內即可通過交叉口,此時車輛平均延誤時間較短。隨著交通流量增加,傳統控制下交叉口排隊車輛增多,造成更多停車延誤同時,使得車輛排隊等候時間也越來越長。在智能控制下,車輛是在行進中通過車速動態調整來避免交通沖突,當交通流量較大時,車輛通行速度減慢,故延誤時間有所增長。由于智能控制下車輛無需進行頻繁的啟停行為,因此車輛延誤較傳統控制能大幅降低。當交通流量分別為300、600、900 veh/h時,東西進口道車輛平均延誤時間分別降低71.82%、59.37%、47.57%,南北進口道車輛平均延誤時間分別降低82.95%、68.23%、53.85%。 圖10 不同交通流量下車輛行程時間對比Fig. 10 Comparison of vehicle travel time under different traffic flows 圖11 不同交通流量下車輛平均延誤時間對比Fig. 11 Comparison of average vehicle delay under different traffic flows 運用VT-Micro模型(virginal tech microscopic emission model)[20]對兩種控制方法下的車輛主要污染物排放與油耗情況進行對比,仿真評價得出的相關數據如表1。 表1 不同控制方法下車輛污染物排放與油耗對比Table 1 Comparison of vehicle pollutant emission and fuelconsumption with different control methods 由表1結果可看出:交叉口智能控制下車輛污染物排放與油耗均得到有效減少。例如在低車流密度(300 veh/h)環境下,智能控制交叉口車輛通過調整最優行車間隙,能以穩定的車速快速通過交叉口,因此經濟與環境效益提升較大,CO、HC和NOx排放分別減少了38.4%,47.6%,54.2%,車輛油耗降低了31.6%。隨著車流密度增大,為保持最優行車間隙,智能控制下交叉口車輛需以較低車速行駛,故效益提升幅度稍有降低。 筆者提出了一種車路協同環境下的交叉口智能控制策略,對交叉口路段功能區進行了定義劃分,在綜合考慮效率與安全前提下,設計了基于間隙理論的交叉口智能協調控制工作流程,建立了交叉口沖突區域范圍計算模型,并由此提出車輛行車間隙控制與車輛狀態調整模型。仿真結果表明:該智能控制方法能使車路協同環境下的車輛不停車安全通過交叉口,所建模型合理有效,不僅可提高車輛在交叉口區域的通行效率,且能有效降低油耗與污染物排放。 需要注意的是,所提出的控制策略是基于較為理想的交通環境下展開,交叉口智能控制的實現還將依賴于車聯網與智能駕駛技術發展,以及未來智能交通基礎設施的布局建設。由于交叉口區域的環境復雜性與多變性,在后續工作中還需進一步開展深入研究。
3.2 車輛狀態調整
4 仿真分析
4.1 車輛通行效率對比分析

4.2 經濟與環境效益對比分析
5 結 語
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06小學科學(學生版)(2020年12期)2021-01-08 09:28:04裝備制造技術(2020年4期)2020-12-25 05:26:24表面工程與再制造(2019年6期)2019-08-24 06:40:04文苑(2018年23期)2018-12-14 01:06:06文苑(2018年19期)2018-11-09 01:30:14文苑(2018年17期)2018-11-09 01:29:26文苑(2018年21期)2018-11-09 01:22:32商周刊(2018年18期)2018-09-21 09:14:46能源(2018年4期)2018-05-19 01:53:44
