基于改進YOLOV3的遙感圖像艦船目標檢測
2022-02-12 09:47:16何維娟
云南民族大學學報(自然科學版) 2022年1期
何維娟,江 濤,王 欣
(云南民族大學 數學與計算機科學學院,云南 昆明 650500)
隨著社會經濟發展,水上交通越來越繁忙,艦船之間會發生碰撞、翻倒和沉船等事故[1],因此,水上安全變成急需解決的一大問題.艦船是水上交通的重要載體,如何快速并準確地識別艦船位置和檢測艦船類型,對艦船水上安全航行和違法行為檢測等有重要的意義,近年來,研究人員在遙感圖像開發中進行了很多研究,公開的目標檢測數據集以及大量檢測算法相繼被提出,提高艦船檢測的準確率變成了艦船檢測的主要任務.隨著遙感技術的快速發展,目標檢測取得了很大的成功,但是在艦船遙感圖像中依舊存在很多難題,從當前艦船遙感圖像目標檢測的研究來看,存在以下幾個普遍的問題:艦船的種類較多并且大小不一,導致檢測難度增大;艦船檢測目標較小,使其所占像素點較少;艦船圖像的成像受天氣、岸邊建筑和光照等因素的影響,從而引起艦船物體視覺的改變.
傳統的船舶檢測方法是基于船舶自動識別系統和艦船特征[2-3],例如,Li等[4]提出了一種改進的空間聚類算法,從而來識別異常行為的艦船;Zhang等[5-6]利用AIS數據來判斷艦船是否碰撞,雖然這些研究在一定條件下都獲得了不錯的效果,但是在復雜的場景下實用性較差,在實際應用中,由于存在識別精度低、檢測速度慢等諸多問題,傳統的艦船檢測依舊難以達到理想的檢測效果.
近年來,在各種圖像識別[7]中,基于深度學習的方法可以分為2種:一種是一階段回歸方法,包括SSD[8]、YOLOV 1[9]、YOLOV 2[10]、YOLOV3[11]等;另一種是兩階段區域建議方法,包括R-CNN[12]、Fast R-CNN[13]、Faster R-CNN[14]、R-FCN[15]等.在這兩類目標檢測算法中,雖然在精度上兩階段算法更優于一階段算法,但是在檢測速度上卻又遠遠不足,因為兩階段檢測算法普遍存在特征提取耗時長,難以達到實時的效果.為此,本文選擇了一階段中兼具精度與速度都良好的YOLOV3算法為框架基礎進行研究,為提高艦船檢測的效果.對尺度特征進行改進.
1 YOLO V3基本原理
YOLOV3引入了FPN結構,使用了Darknet網絡.YOLOV3是從YOLOV1和YOLOV2發展來的,但該方法借鑒了SSD方法中的多尺度思想,在保留了YOLO系列方法采用單階段網絡進行高幀率檢測的同時,進一步具備了檢測微小目標和多尺度目標的能力.經過優化迭代,它與SSD一樣準確,但是比Faster R-CNN和SSD檢測速度更快,如圖1為Darknet-53網絡結構.
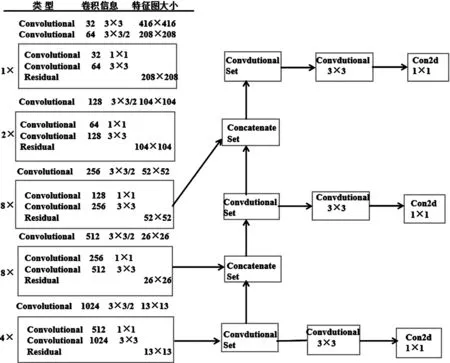
圖1 Darknet-53網絡結構
YOLOV3網絡將輸入的圖像分為S×S個網格,目標的中心點落在某個網格,則這個網格就預測該目標,YOLOV3網絡可預測3種不同的尺度,每一種規模的尺度都可預測3個邊界框,每個框除了要得到目標的位置(tx,ty,tw,th)外,還要預測置信度值.(tx,ty)是相對于預測框的位置,(tw,th)是相對于整體圖片的大小,因此都在(0,1)之間取值,得到的張量為S×S×[3×(4+1+n)],預測出的檢測框表示為:
(1)
式中:(x0,y0)為物體所在單元格的左上角坐標,(bx,by)檢測框的中心坐標,pw和ph分別為先驗框的寬度和高度,σ()為tx和ty歸一化到0~1;bw和bh分別為檢測框的寬度和高度.
2 改進YOLOV3的方法
2.1 艦船目標檢測過程
艦船的總體檢測過程如圖2所示,獲取艦船目標檢測數據集以后,通過標注獲得xml文件,將數據進行預處理,隨后輸入YOLOV3檢測網絡提取特征,最終得到檢測結果.
2.2 增加網絡檢測尺度
YOLOV3 算法使用的是DarkNet-53 網絡結構,通過將特征金字塔模型引入網絡,合并輸入圖像的淺層和高層特征,使該網絡結構能夠識別具有多尺度特征的圖像.該網絡主要由卷積層和池化層組成,配置的3個尺度的采樣特征圖,其中尺寸大小13×13的是下采樣特征圖,而尺寸大小分別為 52×52 、26×26的是上采樣特征圖.與單尺度特征識別相比,這種多尺度特征識別可以提高 YOLOV3 算法對不同尺度輸入圖像的適應性和檢測的準確率.
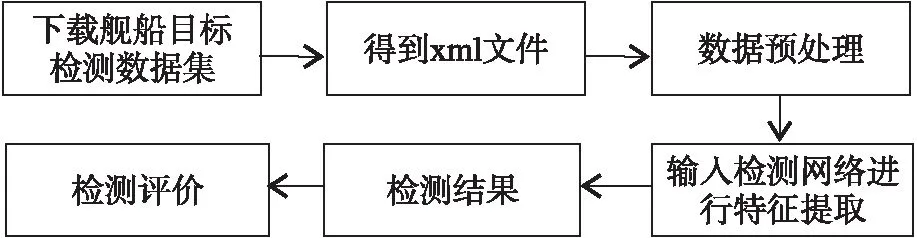
圖2 艦船目標檢測流程
通常,DarkNet-53 網絡對大目標物體具有理想的檢測效果,而對小目標物體的檢測效果則較低.為此,在對 YOLOV3 算法的原始研究的基礎上,文中將著重于改進多尺度特征檢測模塊,以提高識別圖像中較小的艦船準確度.為了實現這一目標,結合檢測目標的屬性,將原始算法中的 3 個尺度擴展為4 個尺度,通過K-means聚類方法來獲得錨,并從中選取12個錨點框,其尺寸分別為: (5, 4)、(6, 13)、(13, 6)、(23, 10,)、(10, 24)、(36, 18)、(17, 40)、(73, 32)、(33, 76)、(59,212)、(107,121)、(191, 73).
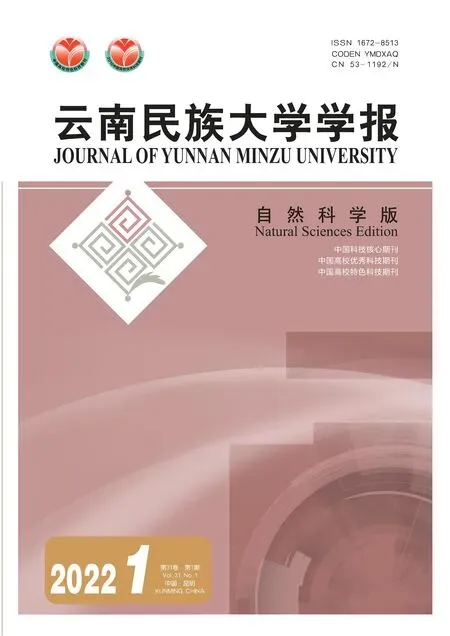
因此,特征檢測可以基于每個尺度上的 3 個不同的錨點框.改進后的多尺度特征預測的總體框架如圖 3 所示.圖3的檢測構架表明.此框架所做的改進主要是在YOLOV3-Darknet53的基礎上,將輸出的特征尺度由52×52增加到104×104,添加了一個104×104的特征尺度.

圖3 多尺度預測構架
3 實驗
在這一節中,使用自制的DSTD數據集,訓練了經典的YOLOV3算法,以及與改進的YOLOV3算法進行實驗,討論了改進的YOLOV3算法的可行性.
3.1 實驗平臺及參數設置
實驗使用了Windows10系統,其中硬件環境為:中央處理器Intel i7-8750H,內存32G,顯卡為顯存8G的NVIDIA GeForce RTX 2080.所有算法均基于Darknet-53在GPU下進行訓練和檢測.
文中除了特別說明以外,使用DSTD數據集所進行的訓練實驗中相關實驗參數如表1所示.
在YOLOV3算法下,訓練階段設置 batch為64,輸入圖像為416×416,學習率為 0.001,訓練迭代次數為 4 000,權重衰減為0.000 5,訓練過程得到正常收斂效果.

表1 實驗參數
3.2 數據集
數據集質量的高低直接影響檢測結果的好壞,現在常見的數據集都是面向自然場景下的多目標檢測任務,數據集中的單類目標場景往往很單一,相應目標數量也很少,針對特定場景和特定目標的數據集并不多見.因此,本文實驗選擇了自制的DSTD數據集,該數據集是面向遙感場景的大規模水面艦船目標檢測數據集,其主要來源為DIOR、DOTA、NWPU-VHR、TGRS-HRRSD-Dataset-master等幾個開源數據集,數據集中包含4 854張艦船圖片,87 076 個艦船實例.DSTD數據集具有針對性強、規模較大;目標尺寸變化大;圖片變化大;類內多樣性高等特點,DSTD數據集部分艦船圖像數據示例如圖4.
為了使進行實驗時訓練和測試數據分布具有充分的相似性,因此在4 854張DSTD艦船遙感圖像中,隨機獲得2 911幅艦船圖像當作訓練集,測試集為剩下的1 943幅圖片(表2).由于每幅圖片至少包含一艘艦船,有的一副圖片包含多艘艦船,因此,艦船目標數量不等于總的圖片數.

圖4 DSTD數據集部分艦船圖像數據示例

表2 艦船目標數據集
3.3 實驗結果
3.3.1 評價指標
本實驗結果使用召回率(Recall)、平均精度(AP)以及幀率(FPS)作為評價指標.
1) 召回率(Recall)
(2)
式中:TP和FN分別為預測正確的樣本數量和預測錯誤的樣本數量.
2) 平均精度(Average Precision,AP)

(3)
平均準確率定義為 P-R 曲線下方的面積.
3) 幀率(FPS) 目標檢測每秒可以檢測的幀數,使用此指標可以評估到目標檢的速度.
3.3.2 實驗結果
為了提高艦船遙感圖像目標檢測的檢測精度,分別用YOLOV3和改進后的YOLOV3對DSTD數據集進行訓練,并獲得各自的權重文件,YOLOV3模型訓練時,使用官方代碼和默認參數,YOLOV3算法和改進的YOLOV3算法對數據集進行訓練 4 000 次Batches,最后進行結果評估,模型訓練損失函數曲線如圖5所示.
如圖5所示,初始迭代損失(loss)高達5607,改進YOLOV3實驗的損失值在200多次時就下降至個位數.而YOLOV3的損失值在300多的時候才降為個位數,總體來說,本文實驗中YOLOV3和改進的YOLOV3的損失值差異并不是很明顯,曲線基本重合,但相對而言,改進的YOLOV3較YOLOV3學習能力更強,收斂速度更快,訓練效果更好.
圖5 損失函數
在對YOLOV3進行改進后,文中在測試數據集上進行了與YOLOV3的對比實驗,實驗結果如表3所示,由表中可以看出,在相同的實驗環境里,本節提出改進后的方法要比原始 YOLOV3 模型的速度稍慢一點,但是在識別精度上卻有很大的提高,YOLOV3算法精度為60.46%,改進的YOLOV3算法精度為72.56%,精度提高了12.1個百分點;YOLOV3的召回率為87.50%,改進后的YOLOV3的召回率可達到91.13%,提高了3.63%個百分點.改進后的YOLOV3能夠保持一定速度的基礎上使精度有很大的提高,綜合考慮,改進后的YOLOV3明顯優于原始YOLOV3模型.

表3 實驗對比結果
4 結語
本文針對艦船遙感圖像檢測中小目標檢測普遍存在精度較低的問題,以YOLOV3網絡模型為基礎,對YOLOV3中尺度的選擇進行優化及改進,實現了對艦船檢測的有效檢測,在自制具有規模較大、艦船目標較多等優點的DSTD遙感艦船目標檢測數據集上進行訓練以及對比測試,實驗結果表明,本文對YOLOV3中尺度的改進,與原始的YOLOV3算法相比,召回率提高了3.63%,精度提高了12.1 %.該艦船檢測方法有效地解決了由小目標問題引起的錯誤檢測和漏檢問題,相比于YOLOV3艦船檢測算法,在保證一定速度的前提下,擁有更高的艦船檢測準確率,為艦船檢測的研究奠定了基礎.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55