基于局部勢場A算法和動態窗口法的農用輪式機器人路徑規劃
2022-02-15 14:47:16劉順閆榮蘭臺浩嬌姜春陽許立成王克凱
江蘇農業科學 2022年2期
關鍵詞:移動機器人
劉順 閆榮蘭 臺浩嬌 姜春陽 許立成 王克凱





摘要:針對未知農業生產環境中,現有移動機器人路徑規劃方法實時性差和適應性弱等問題。在視覺傳感器實時定位和地圖構建的基礎上,提出一種混合規劃方法用于農用輪式機器人。在全局路徑規劃中使用局部勢場A*算法進行路徑規劃,在局部路徑修正中使用改進的動態窗口法進行路徑修正。通過仿真將提出的混合路徑規劃方法與傳統路徑規劃方法進行比較,驗證該方法的優越性和魯棒性。結果表明,相對于傳統路徑規劃方法,混合路徑規劃方法通行代價降低63.89%,在保持最大偏移不變的情況下,搜索時間節省27.01%。該混合路徑規劃方法可以實現未知環境的規劃路徑,有很好的壁障和路徑規劃能力,具有一定的應用價值。
關鍵詞:移動機器人;局部勢場A*算法;動態窗口法;混合路徑規劃方法;視覺傳感器
中圖分類號:S24;TP242 ??文獻標志碼: A
文章編號:1002-1302(2022)02-0192-06
收稿日期:2021-05-17
基金項目:河北省青年科學支持基金(編號:18HB01661)。
作者簡介:劉 順(1988—),男,河北正定人,工程師,主要從事農業自動控制等研究。E-mail:hbjyls@126.com。
隨著農業智能技術的不斷發展,農業機器人領域越來越受到重視。它是一種以農業生產任務為主要目的,同時具有信息識別、路線識別、人工智能等前沿技術于一身,可以解決大量農業生產力的不足[1]。輪式移動機器人以其運動穩定靈活、能耗低、結構簡單等優點,在農業領域廣泛應用[2]。農業機器人可以利用自動導航技術實現施肥、噴灑和除草等智能農業作業,而路徑規劃是自主導航的重要基礎。因此,對農用輪式機器人的路徑規劃方法進行研究具有重要的現實意義。近年來,國內外對輪式移動機器人的路線規劃方法進行了大量的研究,并獲得許多優異的成果。李鳳玲等提出一種適用于未知環境的路徑規劃方法,通過相機獲取周圍環境信息,通過螢火蟲算法進行路徑規劃,以幫助機器人找到最佳路線并避免障礙物,仿真結果表明該算法具有有效性和實時性[3]。吳東林等設計一種基于人工勢場法的采摘機器人動態路徑規劃系統,并對系統方法進行仿真分析,發現該系統優化效果明顯,具有良好的避障和路徑規劃能力[4]。雷蕾等提出一種基于啟發式搜索算法的自動揀選機器人路徑規劃方法,通過改進的A*算法進行路徑規劃,發現改進的A*算法可以明顯改善采摘機器人的行進路徑,并使規劃路徑更平滑[5]。李國輝提出一種用于農業機器人的壁障路徑智能規劃方法,通過分析農用機器人的運動系統結構和定位原理,建立農用機器人的運動模型,完成避障路徑規劃的結構設計,將模糊控制算法用于合理規劃農業機器人的避障過程,發現農業機器人可以成功避開障礙物[6]。上述研究存在算法復雜、內存開銷大、實時性差等問題,但這些研究仍為農業輪式機器人的路徑規劃方法提供了理論依據。本研究提出一種混合路徑規劃方法用于農用輪式機器人。全局路徑規劃使用局部勢場A*(local potential field A*,LPF-A*)算法,而局部路徑校正使用自適應參數動態窗口方法(adaptive parameters dynamic window approach,APDWA),應用混合規劃算法可以有效避開周圍的障礙,找到最優到達目標點的路徑。
1 系統結構
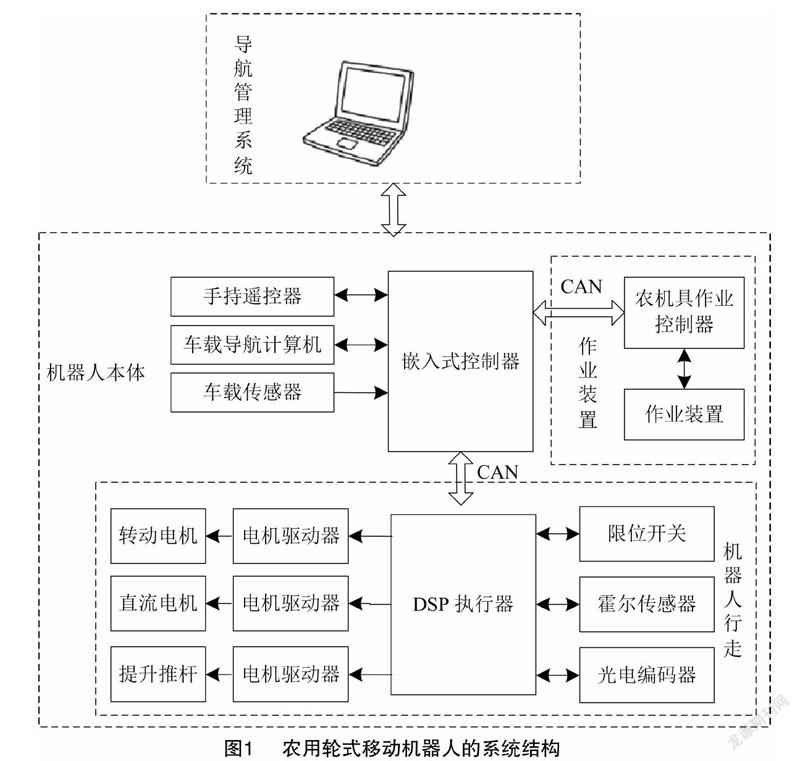
農用輪式移動機器人路徑規劃方法的設計與移動機器人測試平臺密不可分,因此,本研究須要建立一種可在農業環境下運行的輪式移動機器人的原型[7]。輪式移動機器人原型采用開放式結構和控制系統,可安裝不同的農具進行不同的作業。圖1為農用輪式移動機器人的系統結構,該系統分為導航管理系統和機器人主體2個部分。導航管理系統具有遠程控制機器人的功能,但側重于設置機器人的自主運動參數、自主作業并監視機器人的運動狀態。機器人主體由控制系統、行走部分和操作裝置3個部分組成,負責分解、協調和執行任務[8]。
2 混合路徑規劃方法
機器人環境用柵格法表示[9]。在生成的柵格地圖中,全局路徑規劃使用LPF-A*算法,而APDWA算法用于局部障礙物碰撞檢測和局部路徑修改。
2.1 LPF-A*全局路徑規劃
2.1.1 A*算法原理
A*算法通過啟發式函數對路徑的代價進行估算,采用代價最低的節點作為下一個擴展節點[10]。代價函數為
f(n)=g(n)+h(n)。(1)
式中:f(n)表示搜索節點的代價函數;g(n)、h(n)分別表示實際代價值(起點-搜索節點)和評估代價值(搜索節點-終點)。
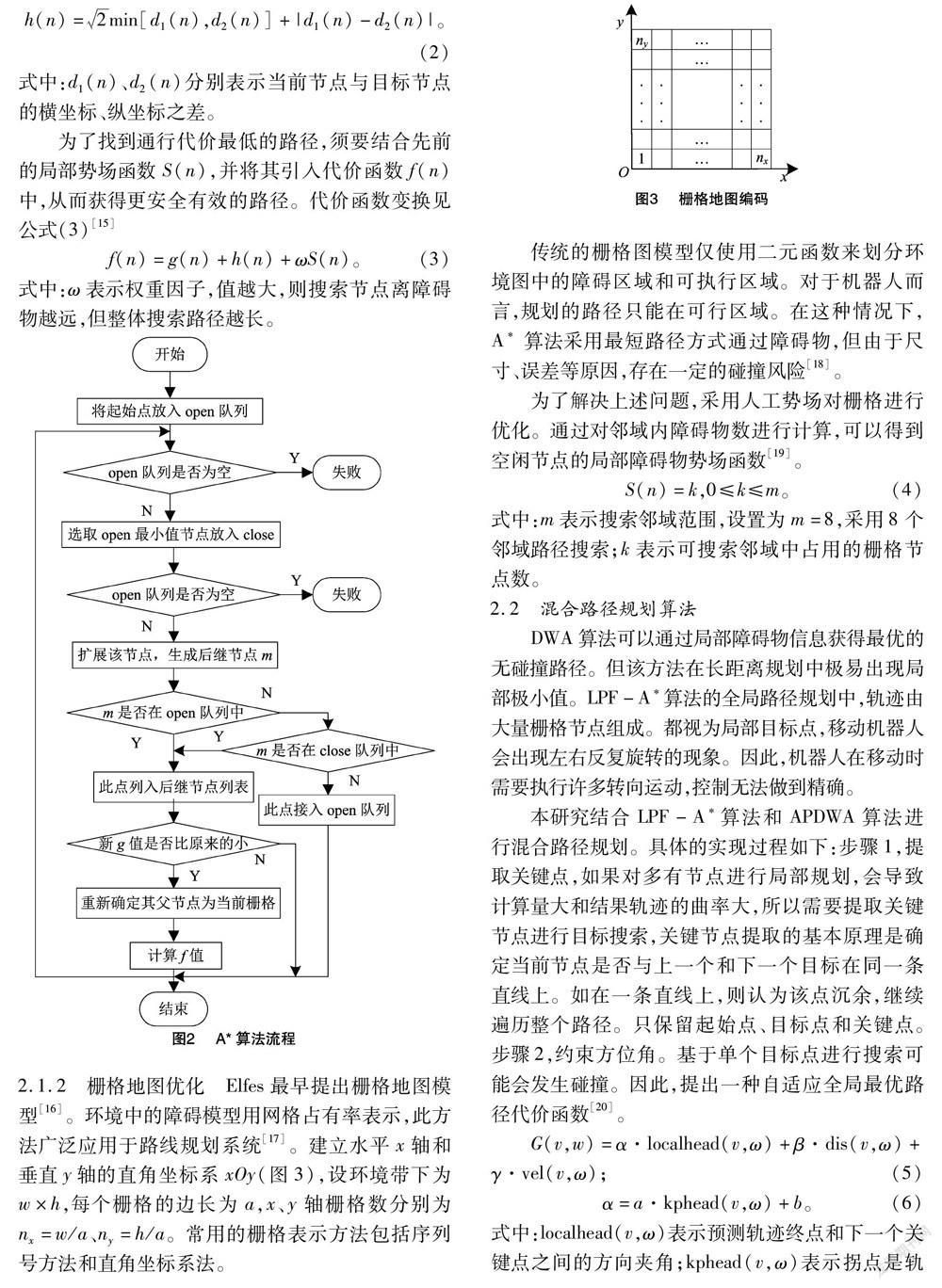
A*算法運行時,有2個列表(open和close),未訪問的節點在open列表中,已訪問的節點在close列表中[11]。具體算法步驟如下:步驟1,當前節點為起點,加入close列表,設open列表為空。步驟2,確定當前節點是否為目標節點。如果是,則規劃完成[12];如果不是,請繼續下一步。步驟3,獲取與當前節點相鄰的8個節點位置,并在每個節點上執行以下操作。(1)判斷節點是否加入close列表。如果是,則忽略;如果不是,請繼續下一步。(2)判斷節點是否加入open列表,如果是,則重新計算g值。如果g值小于原始值,則用父節點替換當前節點,對g值和f值重新計算,轉到步驟4,否則繼續下一步。(3)創建1個新節點,并計算新節點的g值、h值和f值,用父節點替換當前節點[12]。步驟4,在open列表中找到f值最小的節點,并將其分配給當前節點(current_node)。步驟5,當前節點加入close列表,對open列表進行判斷,為空則固化失敗,否則轉到“步驟2”。該算法的流程見圖2。
啟發式函數的選擇是A*算法成功的關鍵[13]。啟發式函數的估計值與實際值越接近,代價函數越準確,且A*算法規劃的路徑越適合實際環境。
本研究使用8個鄰域路徑搜索算法,父節點可以搜索8個相鄰子節點。如果相鄰節點之間的距離為d,則對角節點距離為2d。本研究采用的啟發式函數如下[14]
h(n)=2min[d1(n),d2(n)]+|d1(n)-d2(n)|。(2)
式中:d1(n)、d2(n)分別表示當前節點與目標節點的橫坐標、縱坐標之差。
為了找到通行代價最低的路徑,須要結合先前的局部勢場函數S(n),并將其引入代價函數f(n)中,從而獲得更安全有效的路徑。代價函數變換見公式(3)[15]
f(n)=g(n)+h(n)+ωS(n)。(3)
式中:ω表示權重因子,值越大,則搜索節點離障礙物越遠,但整體搜索路徑越長。
2.1.2 柵格地圖優化
Elfes最早提出柵格地圖模型[16]。環境中的障礙模型用網格占有率表示,此方法廣泛應用于路線規劃系統[17]。建立水平x軸和垂直y軸的直角坐標系xOy(圖3),設環境帶下為w×h,每個柵格的邊長為a,x、y軸柵格數分別為 nx=w/a、ny=h/a。常用的柵格表示方法包括序列號方法和直角坐標系法。
傳統的柵格圖模型僅使用二元函數來劃分環境圖中的障礙區域和可執行區域。對于機器人而言,規劃的路徑只能在可行區域。在這種情況下,A* 算法采用最短路徑方式通過障礙物,但由于尺寸、誤差等原因,存在一定的碰撞風險[18]。
為了解決上述問題,采用人工勢場對柵格進行優化。通過對鄰域內障礙物數進行計算,可以得到空閑節點的局部障礙物勢場函數[19]。
S(n)=k,0≤k≤m。(4)
式中:m表示搜索鄰域范圍,設置為m=8,采用8個鄰域路徑搜索;k表示可搜索鄰域中占用的柵格節點數。
2.2 混合路徑規劃算法
DWA算法可以通過局部障礙物信息獲得最優的無碰撞路徑。但該方法在長距離規劃中極易出現局部極小值。LPF-A*算法的全局路徑規劃中,軌跡由大量柵格節點組成。都視為局部目標點,移動機器人會出現左右反復旋轉的現象。因此,機器人在移動時需要執行許多轉向運動,控制無法做到精確。
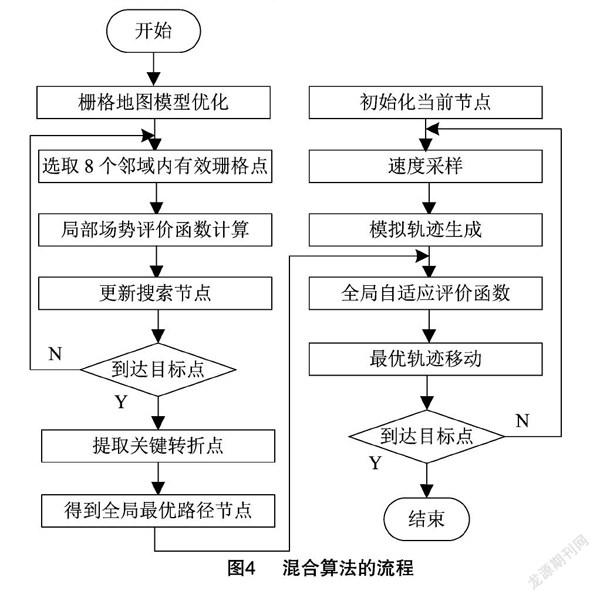
本研究結合LPF-A*算法和APDWA算法進行混合路徑規劃。具體的實現過程如下:步驟1,提取關鍵點,如果對多有節點進行局部規劃,會導致計算量大和結果軌跡的曲率大,所以需要提取關鍵節點進行目標搜索,關鍵節點提取的基本原理是確定當前節點是否與上一個和下一個目標在同一條直線上。如在一條直線上,則認為該點沉余,繼續遍歷整個路徑。只保留起始點、目標點和關鍵點。步驟2,約束方位角。基于單個目標點進行搜索可能會發生碰撞。因此,提出一種自適應全局最優路徑代價函數[20]。
G(v,w)=α·localhead(v,ω)+β·dis(v,ω)+γ·vel(v,ω);(5)
α=a·kphead(v,ω)+b。(6)
式中:localhead(v,ω)表示預測軌跡終點和下一個關鍵點之間的方向夾角;kphead(v,ω)表示拐點是軌跡終點與下一個關鍵點之間的方向夾角;α、β、γ表示各函數相對應的加權系數;dis(v,ω)表示軌跡點到障礙物的最小距離;vel(v,ω)表示當前軌跡速度;a、b表示縮小α范圍的固定參數。
規劃算法流程圖見圖4。
3 仿真結果與分析
3.1 仿真參數
通過對全局優化算法和混合優化算法進行仿真比較,可以驗證算法的優越性。試驗中使用的計算機是Intel i5處理器,8 g內存和Win10系統,并使用MATLAB 2018a軟件進行仿真。在柵格圖中,黑色網格節點是障礙節點,白色網格節點是空閑節點。根據勢場函數的值,使用MATLAB的colormap函數標記從紅色到紫色的勢場函數。對于有局部障礙物存在的空閑節點,紅色勢場最大,紫色勢場最小。β=0.9、γ=0.2、T=3 s、a=0.4、b=1。
3.2 全局規劃算法仿真分析
本研究選擇的試驗環境是20 m×20 m的柵格圖,分析 LPF-A*算法在不同ω參數(0、0.1、1、6)下獲得的路徑圖,ω=0即為A*算法。傳統A*算法和LPF-A*算法之間的比較見圖5,全局規劃算法仿真結果見表1。
由圖5可知,帶有紅色圓圈的柵格是起點,帶有綠色圓圈的柵格是目標點。 ω的增加使得路徑通行代價更低,但路徑長度增加。
由表1可知,ω=6通行代價最低,但是總路徑長度卻明顯增加。這是因為對于多個障礙而言,本研究選擇繞行策略而不是穿越,在不改變路徑長度的情況下,可以大幅降低通行成本。另外,本研究基于A*算法添加局部勢場,這會稍微增加搜索時間和通行節點的總數。
3.3 混合算法仿真分析
本研究采用全局算法得到的關鍵柵格節點序列生成全局最優路徑節點,使用APDWA算法實時避障和局部路徑修改。并對該規劃方法進行仿真分析,選擇ω=6的最低通行代價。圖6為靜態環境下調整α值(1、5、自適應)的仿真結果,紅色軌跡為全局規劃,藍色軌跡為混合規劃。
由圖6可知,混合算法可以實現攻臺壁障。由表2可知,與A*-DWA算法相比,本研究規劃方法通行代價降低了63.89%。在保持最大偏移不變的情況下,搜索時間可以節省27.01%。將動態障礙物添加到原始靜態障礙物環境中,以驗證算法的魯棒性。動態障礙物仿真結果見圖7。
由圖7可知,本研究規劃方法不僅可以滿足全局最優軌跡,還能夠根據環境中的動態障礙物修改局部軌跡,以實時避開障礙物。
4 結束語
本研究提出一種基于LPF-A*算法和APDWA算法的農用輪式移動機器人混合路徑規劃算法,仿真驗證了混合規劃算法的優越性和魯棒性。第一,全局路徑規劃使用LPF-A*算法,而局部路徑使用APDWA算法,該混合規劃算法遇到靜態障礙和動態障礙時可以有效地避開周圍的障礙,找到最優到達目標點的路徑。第二,將本研究算法與未改進前的A*-DWA算法進行比較,結果顯示,本研究算法可以將通行代價降低63.89%,在保持最大偏移不變的情況下,搜索時間可以節省27.01%。考慮到當前的試驗設備和數據規模,本研究仍處于起步階段,因此逐步改進和完善將是下一步的重點。
參考文獻:
[1]李 瑞,敖 雁,孫啟洵,等. 大田農業物聯網應用現狀與展望[J]. 北方園藝,2018(14):148-153.
[2]劉國斌,車宇彤. 農業信息化與農業現代化融合發展研究[J]. 情報科學,2019,37(1):148-155.
[3]李鳳玲,陳 珊,范興江,等. 基于螢火蟲算法動態未知環境的路徑規劃[J]. 自動化與儀表,2019,34(6):53-58.
[4]吳東林,張玉華. 采摘機器人動態路徑規劃系統研究——基于人工勢場法[J]. 農機化研究,2019,41(6):219-223.
[5]雷 蕾,石 晨. 基于啟發式搜索算法的自動采摘機器人路徑規劃研究[J]. 農機化研究,2021,43(7):240-244.
[6]李國輝. 農業機器人避障路徑智能規劃研究[J]. 農機化研究,2021,43(3):236-239.
[7]王銘銘,徐 浩. 基于物聯網的安徽省農田灌溉實時監測及自動灌溉系統研究[J]. 節水灌溉,2017(1):68-70,75.
[8]余國雄,王衛星,謝家興,等. 基于物聯網的荔枝園信息獲取與智能灌溉專家決策系統[J]. 農業工程學報,2016,32(20):144-152.
[9]白秋產. 基于物聯網的農田智能灌溉系統[J]. 江蘇農業科學,2017,45(22):247-251.
[10]朱洪清,于利娟,汪燁歡,等. 基于物聯網的太陽能遠程精準灌溉系統的研制和應用[J]. 中國農機化學報,2014,35(2):246-249.
[11]Liu G M,Ouyang M G,Lu L G,et al. Analysis of the heat generation of lithium-ion battery during charging and discharging considering different influencing factors[J]. Journal of Thermal Analysis and Calorimetry,2014,116(2):1001-1010.
[12]Krewer U,Rder F,Harinath E,et al. Review-dynamic models of Li-ion batteries for diagnosis and operation:A review and perspective[J]. Journal of the Electrochemical Society,2018,165(16):3656-3673.
[13]Patel G K,Dabhi V K,Prajapati H B.Clustering using a combination of particle swarm optimization and K-means[J]. Journal of Intelligent Systems,2017,26(3):457-469.
[14]Gautam J V,Prajapati H B,Dabhi V K,et al. Empirical study of job scheduling algorithms in hadoop MapReduce[J]. Cybernetics and Information Technologies,2017,17(1):146-163.
[15]Caetano C E F,Lima A B,Paulino J O S,et al. A conductor arrangement that overcomes the effective length issue in transmission line grounding[J]. Electric Power Systems Research,2018,159:31-39.
[16]吳宇豪,安籽鵬. 面向圖像三維重建的無人機航線規劃[J]. 計算機技術與應用,2019,45(3):76-79,87.
[17]蘇海鋒,許道林,李汶江,等. 基于改進蟻群A*算法的輸電線路路徑搜索[J]. 河北大學學報(自然科學版),2017,37(1):92-100.
[18]王慶斌,石亮緣,黃 輝,等. 基于改進粒子群算法的輸電線路路徑規劃研究[J]. 廣東電力,2018,31(9):135-141.
[19]劉先正,溫家良,潘 艷,等. 采用改進粒子群算法的直流電網最優潮流控制[J]. 電網技術,2017,41(3):715-720.
[20]王 毅,劉 波,何 宇,等. 果園移動機器人路徑識別系統[J]. 傳感器與微系統,2020,39(9):69-72.
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中國慣性技術學報(2019年3期)2019-10-15 07:21:02
電子測試(2018年15期)2018-09-26 06:01:34
制造技術與機床(2017年3期)2017-06-23 08:11:21
智能系統學報(2015年4期)2015-12-27 09:38:35
機電產品開發與創新(2014年5期)2014-03-11 16:42:32
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:09
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19