組網雷達自適應模糊CFAR檢測融合算法
2022-02-16 06:51:28龔樹鳳龍偉軍潘明海
系統(tǒng)工程與電子技術 2022年1期
龔樹鳳, 龍偉軍, 賁 德, 潘明海
(1. 浙江工業(yè)大學信息工程學院, 浙江 杭州 310012; 2. 南京電子技術研究所, 江蘇 南京 210038;3. 南京航空航天大學電子信息工程學院, 江蘇 南京 210016)
0 引 言
組網雷達系統(tǒng)為了提高系統(tǒng)的目標檢測概率,通常對多部雷達所接收的回波信號按照特定的方式進行信息融合,因此眾多的國內外學者對組網雷達信號的檢測融合方法展開了深入研究。一些學者研究了決策級的信息融合算法,具體如Ramanarayanan和Ni等,采用貝葉斯準則,直接對各雷達檢測器的檢測結果進行融合,仿真結果表明了算法的有效性,但該算法必須明確各雷達檢測器的回波信噪比(signal to noise ratio, SNR)。Liu和Rao等采用最大似然準則,利用蒙特卡羅仿真獲取各參數的估計量,對雷達信號進行了融合并取得了較好的性能。陶然等則利用奈曼皮爾遜準則,先對每部雷達的檢測概率實施局部判決,然后在融合中心僅對局部判決結果進行融合,研究了自適應的融合算法,并獲得了較優(yōu)檢測性能。以上基于決策級的信號融合算法,由于融合的信息僅僅是各檢測器的判決結果,信息量較小,使得最終系統(tǒng)的融合性能提升受限。為改善融合性能,一些學者對信號級的檢測融合算法進行了研究。Banavar等研究了如何在信號傳輸的過程中,對信號進行檢測融合,由于信號傳輸量過大,使得算法實現(xiàn)較為復雜。胡勤振等則為了減小信號傳輸量,在檢測融合過程中增加了局部檢測門限,若某雷達檢測器超過該局部檢測門限,則將該雷達信號送至融合中心進行融合,該算法在各傳感器SNR已知的情況下,獲得了較好的檢測效果。Ciuonzo和郭黎利等對基于Rao方法的分布式檢測融合進行了研究,在已知各傳感器檢測性能參數或SNR的條件下,使檢測性能得到了一定幅度的提升。
考慮到在實際應用環(huán)境中,經常難以獲得所測對象較完整且精確的數學模型及其相關統(tǒng)計知識,致使傳感器所獲得的測量值帶有不精確性,比如說測量值含有隨機性、模糊性等不確定性。針對這種不確定性,一些學者們開始將模糊集理論引入到分布式檢測融合系統(tǒng)并取得了一定的研究成果。Leung等推導了一個模糊隸屬度函數,由此獲得了[0,1]區(qū)間內的判決軟連續(xù)門限值,并將該軟連續(xù)門限值代替目標檢測中的固定門限值,從而將模糊理論引入到目標檢測中,實現(xiàn)了用模糊軟判決的方法進行目標檢測。隨后,Leung等在文獻[12]中對僅有兩個傳感器的檢測系統(tǒng),進行了模糊融合準則的研究。 Hammoudi等在文獻[12]基礎上,以有3個傳感器的檢測系統(tǒng)為例,研究了分布式的模糊檢測融合算法,并基于傳統(tǒng)的單元平均(cell averaging, CA)和有序統(tǒng)計(ordered statistic, OS)恒虛警(constant false alarm rate, CFAR)檢測算法,提出了分布式的模糊CA-CFAR和分布式的模糊OS-CFAR。郝程鵬等則先后在無偏最小方差估計(unbiased minimum-variance estimator, UMVE)和自動索引CA(automatic censored CA, ACCA) CFAR檢測方法的基礎上,研究了分布式模糊UMVE檢測系統(tǒng)和分布式模糊ACCA檢測系統(tǒng),并將模糊ACCA-CFAR檢測算法用于擴展目標積累檢測中,取得了較好的檢測性能。文獻[17]則針對威布爾雜波背景研究了一種加權有序統(tǒng)計模糊CFAR(weighted ordered statistic fuzzy-CFAR, WOSF-CFAR)檢測算法,仿真結果表明了算法的有效性。然而在組網雷達系統(tǒng)中,由于被探測目標的雷達截面積與各雷達檢測器所處的位置有較大關系,而且有些情況下無法獲知或者難以獲知雷達位置與目標的具體關系,故有時難以估計各雷達接收的回波信號的強度。再加上各雷達所處的環(huán)境與各自性能的差異,想要獲得各檢測單元的回波SNR,在SNR已知的情況下完成組網雷達的信號檢測融合是比較困難的,因此文獻[18-19]基于模糊邏輯和篩選平均檢測-CFAR(censored mean level detector-CFAR,CMLD-CFAR)算法,研究了分布式模糊最大CMLD-CFAR(maximum-CMLD-CFAR, MX-CMLD-CFAR)系統(tǒng)的融合算法。以有3個傳感器的檢測系統(tǒng)為例,在SNR未知的情況下,通過計算各雷達檢測結果的可信度再采用表決融合的方式和模糊代數積融合準則,自適應選擇傳感器數目進行信號融合,取得了較好的性能。但可信度表決模塊設計采用二元邏輯器件通過與或運算等實現(xiàn),隨著組網雷達數目的增加,表決器的復雜度大大增加。
為了解決上述不足,實現(xiàn)在無SNR已知條件下的雷達信號融合檢測,本文在文獻[18]模糊融合檢測的基礎上,結合決策級和信號級檢測,設計了一個由可信度綜合模塊、數據融合模塊、比較判決模塊和反饋控制模塊組成的反饋融合中心,并基于該反饋融合中心提出了一種可用于雷達發(fā)射能量優(yōu)化的雙門限自適應模糊檢測融合算法。首先,各雷達在SNR未知的情況下,對目標區(qū)域利用模糊MX-CMLD-CFAR算法進行模糊檢測,并計算該雷達檢測結果的可信度;然后各雷達將可信度送至融合中心的可信度綜合模塊,該模塊根據各雷達的檢測可信度以及預設的可信度權重系數,計算整個組網系統(tǒng)的可信度,通過對綜合可信度的判決篩選出可以傳送至數據融合模塊的具體雷達;被選中的雷達將回波數據的模糊隸屬度送至融合中心的數據融合模塊,按照一定的模糊融合準則進行融合以獲得全局隸屬度;最后全局隸屬度與全局判決門限進行比較,給出最終的判決結果。而融合中心的反饋控制模塊則在可信度綜合模塊和比較判決模塊的控制下,實現(xiàn)對各雷達發(fā)射能量的控制,盡可能保證總體探測概率滿足要求的條件下節(jié)約發(fā)射能量。
1 模糊MX-CMLD-CFAR
1.1 MX-CMLD-CFAR
MX-CMLD-CFAR是一種有序類的CFAR檢測器,是為提高多目標干擾背景中的檢測概率而提出的。該檢測器將前后參考滑窗中的單元樣本按照幅值由小到大的方式進行排序,刪除若干個樣本后,對剩余的樣本通過加權平均的方法來估計雜波的強度,再用最大邏輯選擇選取強度較大者,作為檢測器對雜波強度的估計,其原理框圖如圖1所示。
圖1 MX-CMLD-CFARFig.1 MX-CMLD-CFAR
排序后樣本值(),()(,=1,2,…,-)不再是統(tǒng)計獨立的,為求出和的概率密度函數,需引入線性變換:
=(--+1)(()-(-1)),=1,2,…,-
(1)
經式(1)可推得統(tǒng)計獨立的隨機變量:

(2)
假設目標處在高斯的均勻雜波背景中,由于參考單元樣本數據(=1,2,…,)是統(tǒng)計獨立而且同分布的,因此和的概率密度函數可以寫為

(3)
式中:(·)是伽瑪函數。
和的累積分布函數為


(4)
根據概率論的知識,可以得到檢驗統(tǒng)計量的概率密度函數為
()=()()+()()=
2()()
(5)
假設目標為Swell II型,采用雙擇假設,表示檢測單元中的檢測統(tǒng)計量(),則有兩種假設下的概率密度函數為
:()=exp(-)
(6)
:()=(1)exp(-)
(7)
式中:=1+,為目標信號與噪聲的平均功率比值。
由于判決門限=是一個隨機變量,計算虛警概率時需要對求統(tǒng)計平均:
={Pr[()≥|]}=

(8)
將式(5)和式(6)代入式(8)后,推導可得
=2(2+)-(-)(;-,--1),
=1(2+)
(9)

1.2 模糊MX-CMLD-CFAR
利用模糊檢測器,需要定義隸屬度函數。隸屬度函數用介于[0,1]區(qū)間內的連續(xù)值來表征“有目標”和“無目標”兩種假設成立的程度,定義為
()=Pr(>|)=1-()
(10)
式中:是服從高斯分布的觀測值,=表示待檢測單元與背景功率的比值;為與比值相對應的隨機變量;()為的累積分布函數。
由此可以看出, “無目標”假設下,強參考單元值被賦予小的隸屬度值,因此隸屬度函數隨參考單元強度增加而單調遞減。模糊CFAR準則采用如下判決準則:若()<,則聲明目標存在。結合MX-CMLD的計算,可推導得到模糊MX-CMLD-CFAR的隸屬度函數為

(11)
因為對任意連續(xù)隨機變量應用累積分布函數形成的隨機變量均勻分布于[0,1]區(qū)間,所以() 均勻分布于[0,1]。模糊MX-CMLD-CFAR的檢測原理圖如圖2所示。

圖2 模糊MX-CMLD-CFARFig.2 Fuzzy MX-CMLD-CFAR
由此可以看出,采用模糊MX-CMLD-CFAR檢測算法,判決門限與SNR無關,可在SNR未知的情況下完成目標檢測。
根據文獻[18]的分析,選擇如下的可信度函數:
(12)

2 自適應分布式模糊CFAR檢測融合算法
本文以含有4個雷達的組網系統(tǒng)為例,如圖3所示。分布式檢測融合系統(tǒng)利用融合中心將單個傳感器(雷達)對目標的檢測結果進行數據融合來決定整個系統(tǒng)的檢測性能。理論上,傳感器發(fā)射功率越大、融合中心融合的檢測信息越多,系統(tǒng)的檢測性能就越好。然而,單傳感器傳輸到融合中心的信息越多,系統(tǒng)的發(fā)射功率不僅會增加,還會影響系統(tǒng)的傳輸、實時性能等,增加系統(tǒng)的數據處理負擔。因此,設計了基于投票表決的反饋融合中心,將融合中心分為4個模塊,分別為可信度表決模塊、數據融合模塊、比較判斷模塊和反饋控制模塊。考慮到文獻[18]中3個傳感器仿真時,在可信度投票表決模塊采用依次判斷每個傳感器的可信度值,并通過組合等形式最終獲得可融合的雷達數據,電路實現(xiàn)比較繁瑣,尤其雷達數目較多時,需要判斷的組合情況種類太多,本文提出了加權的可信度表決模塊,通過設定好的雷達可信度權值,計算綜合可信度,再對綜合可信度進行判決即可。
圖3 自適應分布式模糊CFAR檢測融合框圖Fig.3 Block diagram of adaptive distributed fuzzy CFAR detection fusion
具體工作流程如下:
每個雷達先對目標進行短時間的探測,計算探測時的隸屬度和可信度Cr;
各雷達將檢測的可信度Cr送至融合中心的表決模塊,表決模塊對各可信度進行加權處理,得到組網雷達的綜合可信度Cr;
綜合可信度與預先設置好的可信度門限進行比較,決定哪些雷達可以將接收數據的隸屬度送至融合中心;
融合中心根據特定的融合準則進行信息融合,得到全局隸屬度函數全局判決門限,并送至判決模塊;
判決模塊進行判決,如果全局隸屬度函數大于全局判決門限,則判斷為有目標存在,否則無目標;
全局累計判決,若全局檢測概率過低,反饋模塊則反饋給各雷達,各雷達需增加信號發(fā)射能量以提高SNR來增加檢測概率;若全局檢測概率滿足要求,有些雷達未參與融合,反饋模塊則反饋給未參與信息融合的雷達關閉雷達信號,節(jié)省發(fā)射功率。
根據文獻[18]可知,分布式模糊融合檢測算法中,模糊代數積融合準則的檢測效果較好,因此本文采用模糊代數積融合準則,假設參與融合的雷達檢測器數目為,根據綜合可信度Cr的值而決定,為了體現(xiàn)單部雷達檢測概率(可信度Cr)越大,參與融合中心信息融合的概率越大,其分配的權重也越大,Cr表達式如下:

(13)
融合中心的全局隸屬度函數為

(14)
可得到虛警概率和融合中心閾值的關系為

(15)
3 仿真與分析
本文利用Matlab軟件,對所提出的自適應分布式模糊CFAR檢測融合算法進行了仿真驗證。仿真中參數設定:融合中心全局虛警概率=10,每部雷達傳感器參考單元長度=32,目標類型Swerling II 型,對于MX-CMLD,=4,這樣MX-CMLD具有對抗8個干擾目標的能力,融合數據蒙特卡羅循環(huán)次數=2 000。
可信度綜合模塊判決準則:首先對4部雷達傳送進來的短時檢測概率進行由大到小的排序,排序后的可信度記為Cr(1)>Cr(2)>Cr(3)>Cr(4);考慮到可信度越高,單部雷達檢測結果越可靠,因此各雷達分配不同的權重因子,=[04, 03, 02, 01]。當綜合可信度Cr>0.4時,選擇可信度較高的兩部雷達數據進行融合;當Cr<0.2時,4部雷達均參與數據融合;否則選取可信度較高的3部雷達數據進行融合。
考慮到每部雷達與目標所處位置的距離可能不同,每部雷達的發(fā)射功率和SNR可能不同,仿真過程中特意設置每部雷達SNR不同。
3.1 與文獻[18]結果對比
考慮到文獻[18]采用了3個傳感器協(xié)同工作,本文首先仿真了均勻背景中3部雷達融合的數據。3部雷達按照可信度由高到低的順序分配的權重因子為=[045, 035, 020]。當計算所得綜合可信度大于04時,系統(tǒng)自動選擇可信度較高的兩部雷達參與數據融合,否則3部雷達全部參與數據融合。設置雷達接收信號的SNR如下:雷達1的SNR變化范圍為[0,14] dB,雷達2的SNR變化范圍為[3,17] dB,雷達3的SNR變化范圍為[6, 20] dB。
圖4和圖5給出了本文自適應融合算法與文獻[18]融合算法及不同數目雷達融合數據的對比,橫坐標均以雷達1的SNR為橫坐標,即雷達1的SNR為0 dB時,此時雷達2的SNR為3 dB,雷達3的SNR則為6 dB。

圖4 兩種算法檢測概率對比Fig.4 Comparison of detection probability between two algorithms
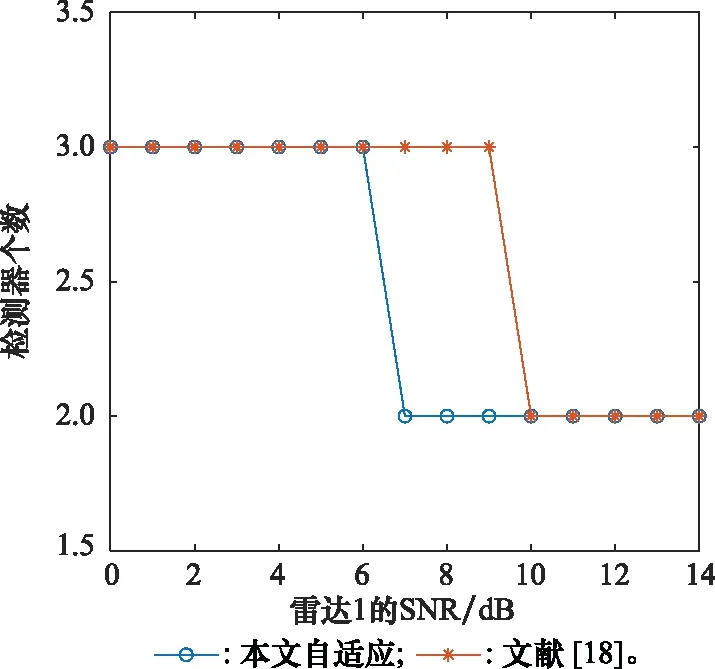
圖5 兩種算法融合檢測器個數對比Fig.5 Comparison of number of fusion detectors between two algorithms
由圖4和圖5可以看出,當每部雷達工作的SNR都比較小的時候,算法會自動選取3部雷達數據進行融合,以保證有較高的檢測概率。隨著每部雷達SNR的增加,每部雷達的檢測可信度也增加,自適應融合算法在雷達1的SNR為8 dB時開始選取兩部性能較好的雷達參與融合,此時融合檢測概率為0.973。而文獻[18]繼續(xù)采用3部雷達數據進行融合,融合檢測概率為0.989,二者相差不大。當雷達1的SNR達到11 dB時,文獻[18]算法開始自動選取可信度較高的兩部雷達參與融合,本文算法和文獻[18]算法此時融合檢測概率均為1。由此可以看出,本文所提算法通過計算綜合可信度來選擇融合雷達數據,也是可行的。相比于文獻[18],融合中心可信度表決模塊更容易實現(xiàn),算法簡單。
3.2 均勻背景中的融合檢測
均勻背景中,設置雷達接收信號的SNR,雷達1的SNR變化范圍為[0,12] dB,雷達2的SNR變化范圍為[2,14] dB,雷達3的SNR變化范圍為[4,16] dB,雷達4的SNR為[6,18] dB。圖6和圖7給出了自適應融合算法與不同數目雷達融合數據的對比,圖8給出了自適應融合時每部雷達的工作狀態(tài)。為了畫圖方便,圖6~圖8均以雷達1的SNR為橫坐標,即雷達1的SNR為0 dB時,雷達2的SNR為2 dB,雷達3的SNR為4 dB,雷達4的SNR為6 dB。
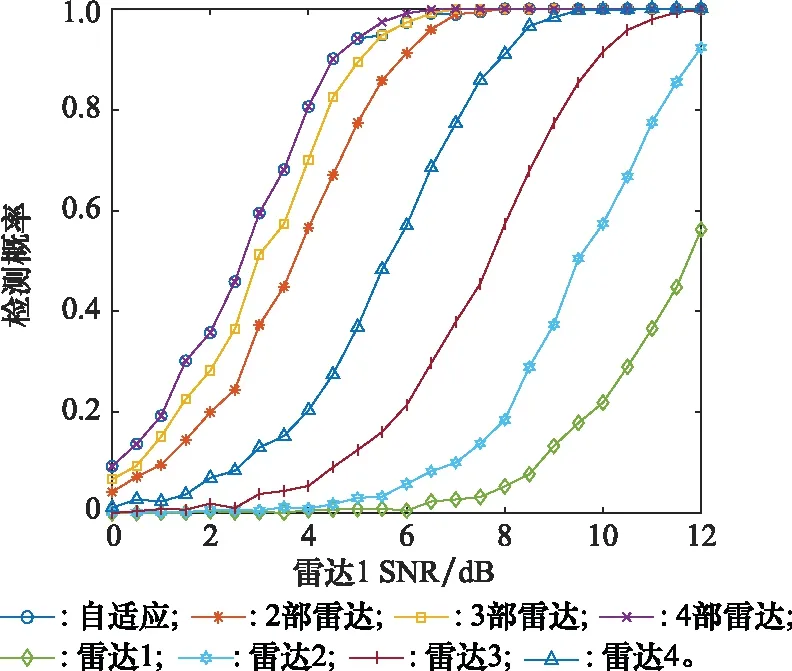
圖6 均勻背景中的檢測概率Fig.6 Detection probability in uniform background
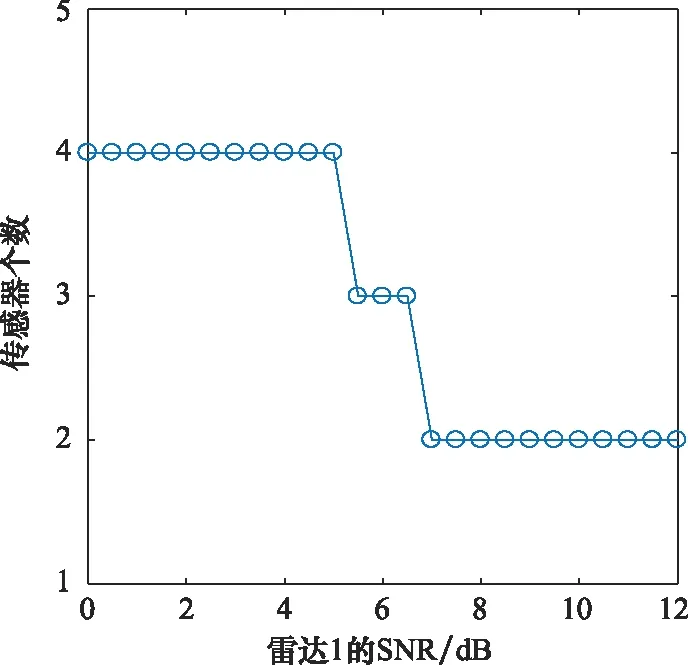
圖7 均勻背景中自適應融合檢測器個數Fig.7 Number of adaptive fusion detectors in uniform background
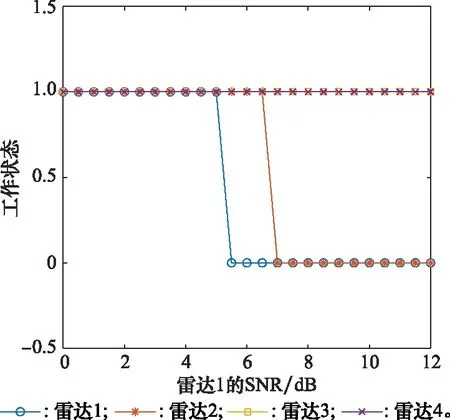
圖8 均勻背景中自適應雷達工作狀態(tài)Fig.8 Adaptive radar working state in uniform background
由圖6~圖8可以看出,當每部雷達工作的SNR都比較小的時候,算法會自動選取4部雷達數據進行融合,以保證有較高的檢測概率。隨著每部雷達SNR的增加,每部雷達的檢測可信度也增加,自適應融合算法選取3部性能較好的雷達參與融合,不需要融合的雷達則可以關閉發(fā)射信號,比如圖7中的雷達1狀態(tài)為0時,表示已關閉該雷達。當兩部雷達的SNR較大達到一定程度時,自適應融合算法則會選取兩部雷達數據進行融合,關閉其他兩部雷達,如圖8中的雷達1和雷達2,工作狀態(tài)均為0,以節(jié)約能量。
3.3 多目標干擾背景中的雷達檢測
圖9~圖11為不同數目的雷達在多目標干擾背景中的檢測性能,仿真中設置左右滑窗的干擾目標數目均為4,左滑窗干擾目標所處的窗口位置為[4, 6, 10, 15],右滑窗干擾目標所處的窗口位置為[20, 22, 26, 31],每部雷達的干擾噪聲比(interference to noise ratio, INR)滿足,INR=SNR,=1,2,3,4。
由圖9~圖11可以看出,多目標干擾背景中,當每部雷達的SNR增大時,單部雷達和融合后的檢測算法性能都會增加,而且自適應融合的雷達數目會減少,以節(jié)約能量。

圖9 多目標干擾背景中的檢測概率Fig.9 Detection probability in multi-target interference background
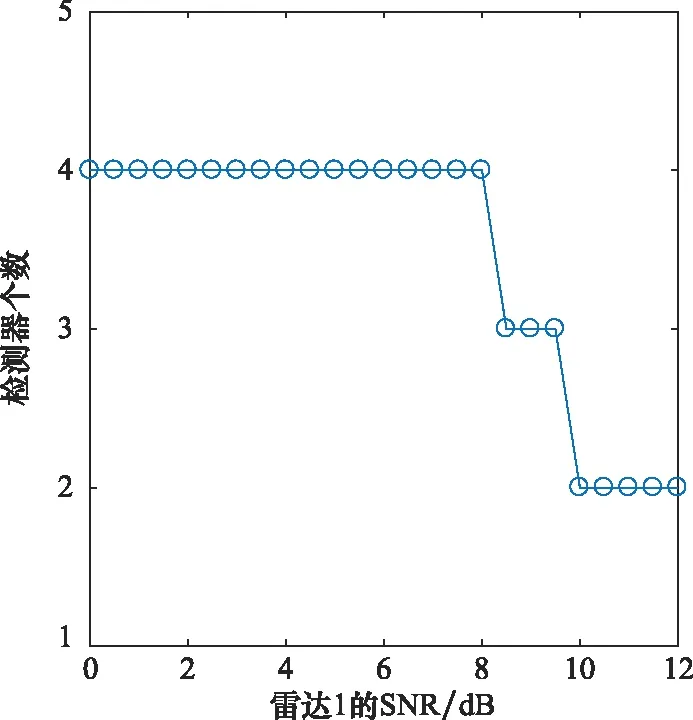
圖10 多目標干擾背景中自適應融合檢測器個數Fig.10 Number of adaptive fusion detectors in multi-target interference background

圖11 多目標干擾背景中自適應雷達工作狀態(tài)Fig.11 Adaptive radar working state in multi-target interference background
3.4 雷達能量的自適應控制
以4部雷達融合為例,對雷達能量的控制進行了仿真,假設噪聲的功率為1,通過調整雷達的信號能量以達到預定的檢測概率。
圖12和圖13是開始時刻4部雷達工作的SNR都比較低的情況下,即起始時刻4部雷達發(fā)射信號的能量較低,融合后的檢測概率不滿足要求,隨著迭代次數的增加,則自適應調整4部雷達的信號發(fā)射能量,直至滿足系統(tǒng)要求。
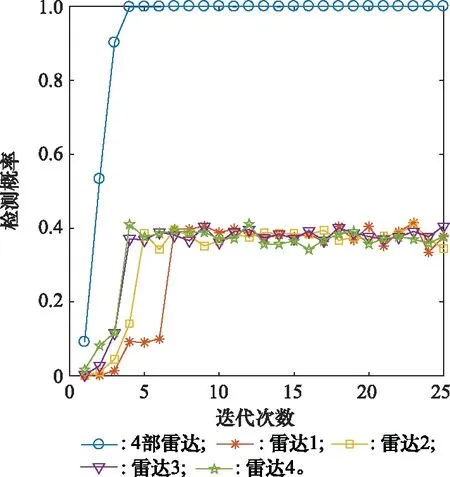
圖12 迭代時的檢測概率(4部雷達初始均為低SNR)Fig.12 Detection probability for iteration times (the initial SNR of four radars is low)

圖13 迭代時的信號能量(4部雷達初始均為低SNR)Fig.13 Signal energy for iteration times (the initial SNR of four radars is low)
圖14和圖15是開始時刻雷達1和雷達2工作在低SNR情況下,雷達3和雷達4工作在高SNR情況下。可以看出,系統(tǒng)會按照檢測概率要求,自適應降低雷達3和雷達4的能量,提高雷達1和雷達2的信號能量,直至滿足系統(tǒng)要求為止。
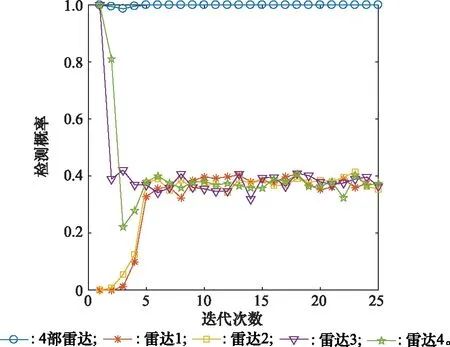
圖14 迭代時的檢測概率(2部雷達初始均為低SNR)Fig.14 Detection probability for iteration times (the initial SNR of two radars is low)
表1給出了與圖15對應的雷達信號能量值,由表1可以看出,起始時刻,組網系統(tǒng)的檢測概率可以達到1,系統(tǒng)總能量

表1 雷達融合時信號能量的控制

圖15 迭代時的信號能量(2部雷達初始均為低SNR)Fig.15 Signal energy for iteration times (the initial SNR of two radars is low)
為20.202 2,但經過系統(tǒng)多次迭代調整后,在系統(tǒng)總能量14.2附近,系統(tǒng)的檢測概率依舊可以達到1,從而節(jié)省了系統(tǒng)的總能量。
4 結 論
本文在組網雷達檢測融合回波信號SNR未知的條件下,基于模糊邏輯和MX-CMLD算法,提出了一種高效的自適應分布式模糊MX-CMLD-CFAR檢測算法,并給出了該檢測算法的自適應融合檢測框架。在Swerling II型目標及高斯分布噪聲假設下,針對均勻背景、多目標干擾背景的雷達目標檢測情況進行了融合檢測仿真。仿真結果表明,自適應分布式模糊MX-CMLD-CFAR算法具有較好的檢測性能,并可以在一定程度上實現(xiàn)雷達資源的管理。
猜你喜歡
今日農業(yè)(2021年19期)2022-01-12 06:16:36
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中老年保健(2021年11期)2021-08-22 03:15:44
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
電子制作(2018年11期)2018-08-04 03:25:42