基于改進(jìn)粒子群算法的非對稱傳動主軸多目標(biāo)優(yōu)化
2022-02-16 01:18:22張運(yùn)濤李以農(nóng)張志達(dá)羅法氿
振動與沖擊 2022年2期
張運(yùn)濤, 李以農(nóng), 張志達(dá), 羅法氿, 王 成
(1. 重慶大學(xué) 機(jī)械傳動國家重點(diǎn)實(shí)驗(yàn)室,重慶 400030;2. 北方車輛研究所,北京 100072)
傳動軸是旋轉(zhuǎn)機(jī)械傳遞動力和運(yùn)動的關(guān)鍵零件,其使用性能對整個系統(tǒng)的功能實(shí)現(xiàn)和可靠性起著至關(guān)重要的作用[1-2]。對于特種車輛,由于傳動系統(tǒng)固有的非對稱結(jié)構(gòu),當(dāng)車輛啟停、換擋和轉(zhuǎn)向時(shí),會使傳動軸兩端受到非對稱交變載荷和沖擊載荷作用,往往會造成傳動軸一端因?yàn)槭艿竭^大的載荷而出現(xiàn)疲勞斷裂,導(dǎo)致整個車輛無法正常工作[3-5]。可見,傳動軸結(jié)構(gòu)參數(shù)是影響特種車輛傳動性能的關(guān)鍵。因此,對傳動軸的結(jié)構(gòu)參數(shù)優(yōu)化具有重要的工程意義。
目前,對于結(jié)構(gòu)優(yōu)化問題,通常采用解析法和數(shù)值計(jì)算法兩種[6]。解析法即利用數(shù)學(xué)分析的方法,根據(jù)目標(biāo)函數(shù)導(dǎo)數(shù)的變化規(guī)律與函數(shù)極值的關(guān)系,求取目標(biāo)函數(shù)的極值點(diǎn)。但當(dāng)目標(biāo)函數(shù)比較復(fù)雜或?yàn)榉峭购瘮?shù)時(shí),很難應(yīng)用解析法求取由目標(biāo)函數(shù)各項(xiàng)偏導(dǎo)數(shù)組成的方程組,故解析法現(xiàn)在已較少使用。數(shù)值計(jì)算法是以適當(dāng)步長沿著目標(biāo)函數(shù)下降的方向,逐步逼近目標(biāo)函數(shù)最優(yōu)解的方法。Huang等[7]建立了螺旋槳軸彎扭耦合振動模型,利用高階Runge-Kutta法進(jìn)行數(shù)值計(jì)算完成了螺旋槳軸的結(jié)構(gòu)尺寸優(yōu)化。Wang等[8]通過數(shù)值計(jì)算建立了軸距變化與滾動阻力的關(guān)系,結(jié)果表明優(yōu)化軸距可以提高車輛的牽引性能,并仿真驗(yàn)證了優(yōu)化結(jié)果的有效性。隨著近代電子計(jì)算機(jī)計(jì)算能力的飛速提升,數(shù)值計(jì)算法得到了更加廣泛的應(yīng)用。Hong等[9]針對超精密磨床靜液壓主軸設(shè)計(jì)提出了一種人機(jī)集成設(shè)計(jì)框架,并對主軸進(jìn)行熱力學(xué)性能優(yōu)化和動態(tài)優(yōu)化,極大地提高了主軸的性能。杜官將等[10]利用APDL建立機(jī)床主軸的參數(shù)化有限元模型,以主軸的重量為優(yōu)化目標(biāo),應(yīng)用ANSYS優(yōu)化設(shè)計(jì)功能對主軸的支承跨距、外徑和懸伸長度等進(jìn)行了優(yōu)化設(shè)計(jì),結(jié)果表明在保證機(jī)床各種性能的前提下,主軸重量得到有效的減小。
上述的優(yōu)化方法在求解單目標(biāo)優(yōu)化問題時(shí)具有收斂速度快、搜索效率高等優(yōu)點(diǎn),但對于具有復(fù)雜梯度信息的問題,則無能為力;同時(shí),面對多峰、多模態(tài)的優(yōu)化問題,傳統(tǒng)優(yōu)化方法會很快陷入局部最優(yōu)解,且很難跳出[11]。針對上述問題,眾多智能算法應(yīng)運(yùn)而生,如人群搜索法、遺傳算法、粒子群算法和蟻群算法等[12]。Yi等[13]根據(jù)主軸電機(jī)與傳動系統(tǒng)之間的能量流,建立了主軸系統(tǒng)的能量模型,以結(jié)構(gòu)體積最小和單位體積能耗最小為目標(biāo),建立了主軸電機(jī)和傳動系統(tǒng)多目標(biāo)參數(shù)優(yōu)化模型,基于多目標(biāo)機(jī)器學(xué)習(xí)優(yōu)化算法求解Pareto最優(yōu)解并通過實(shí)例驗(yàn)證了所提優(yōu)化方法。朱成實(shí)等[14]針對傳統(tǒng)優(yōu)化設(shè)計(jì)方法在解決主軸優(yōu)化設(shè)計(jì)中出現(xiàn)的問題,引入慣性權(quán)重值適應(yīng)性遞減的粒子群算法,結(jié)果表明主軸結(jié)構(gòu)參數(shù)優(yōu)化效果明顯。陳東菊等[15]以主軸系統(tǒng)參數(shù)作為設(shè)計(jì)變量,利用遺傳算法對液體靜壓主軸系統(tǒng)的運(yùn)動誤差進(jìn)行優(yōu)化分析,優(yōu)化后主軸系統(tǒng)橫、垂向誤差運(yùn)動及主軸傾角的優(yōu)化效率分別為41.22%,25.21%和66.16%,優(yōu)化效果顯著。
現(xiàn)有文獻(xiàn)對傳動軸的結(jié)構(gòu)優(yōu)化大都是基于傳動軸具有對稱的結(jié)構(gòu)布置,傳遞載荷時(shí)載荷均勻分配。然而,特種車輛由于綜合傳動系統(tǒng)結(jié)構(gòu)布局限制,傳動主軸兩端的輸出為非對稱結(jié)構(gòu),系統(tǒng)剛度和阻尼等參數(shù)存在明顯差別,導(dǎo)致左右軸段抗振能力存在較大差別,同時(shí)系統(tǒng)輸入載荷也會不被左右兩側(cè)輸出均分[16]。
有鑒于此,本文綜合考慮傳動主軸-軸承系統(tǒng)內(nèi)外多源激勵,采用集中質(zhì)量法建立系統(tǒng)非線性振動模型,利用Runge-Kutta法進(jìn)行數(shù)值求解,獲得穩(wěn)態(tài)工況下系統(tǒng)彎扭耦合振動響應(yīng)以及動載荷和振動能量的分布特點(diǎn)。基于改進(jìn)的粒子群優(yōu)化 (particle swarm optimization,PSO)算法,以系統(tǒng)的振動載荷和振動能量為優(yōu)化目標(biāo)對系統(tǒng)結(jié)構(gòu)參數(shù)進(jìn)行多目標(biāo)優(yōu)化,并通過仿真驗(yàn)證了優(yōu)化結(jié)果的有效性,優(yōu)化結(jié)果為非對稱傳動系統(tǒng)的結(jié)構(gòu)優(yōu)化問題提供了重要的指導(dǎo)依據(jù)。
1 主軸-軸承系統(tǒng)動力學(xué)模型
某特種車輛的傳動主軸是非對稱布置的三轉(zhuǎn)子盤結(jié)構(gòu),中間轉(zhuǎn)子盤為復(fù)合行星排的行星架,作為主軸結(jié)構(gòu)的動力輸入結(jié)構(gòu);左右兩邊的轉(zhuǎn)子盤為左、右側(cè)行星匯流排的齒圈,作為主軸系統(tǒng)的輸出結(jié)構(gòu)分別連接左、右側(cè)的車輪。考慮輸入/輸出、軸承支撐等因素的影響,基于集中質(zhì)量法簡化建立了如圖1所示的主軸-軸承系統(tǒng)彎扭耦合動力學(xué)模型[17-19]。
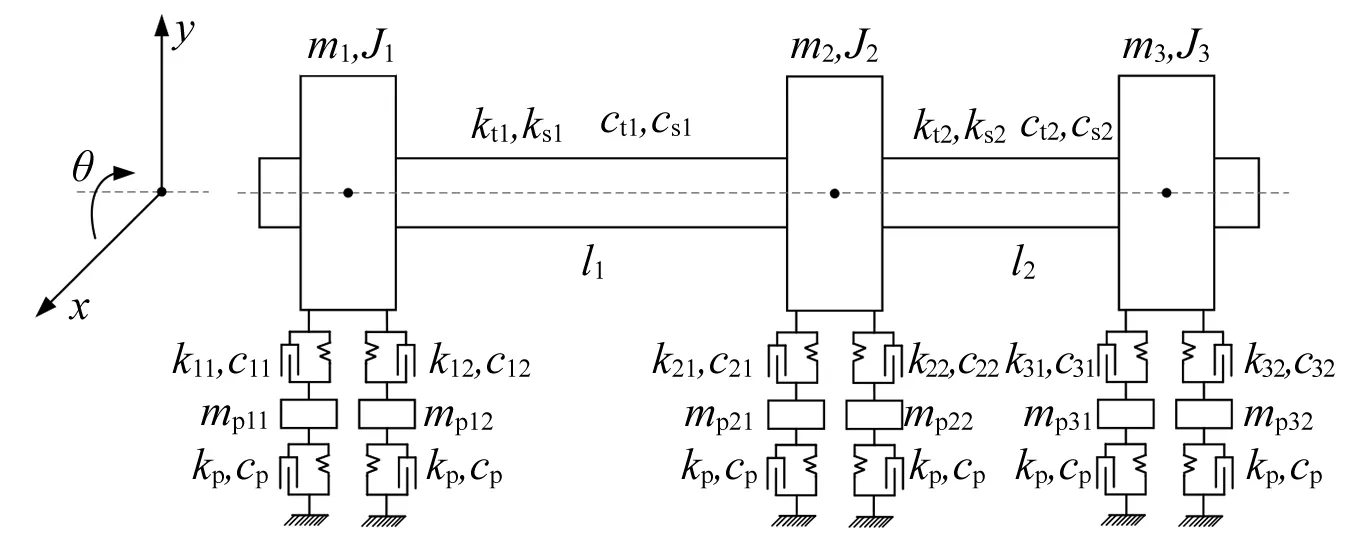
圖1 主軸-軸承系統(tǒng)動力學(xué)模型Fig.1 Dynamic model of spindle bearing system
圖1中:mi和Ji分別為三個轉(zhuǎn)子盤(包括軸承內(nèi)圈)的集中質(zhì)量和轉(zhuǎn)動慣量;mpij為各轉(zhuǎn)子盤兩端軸承座(包括軸承外圈)的集中質(zhì)量;kt1,2和ct1,2為主軸兩端的扭轉(zhuǎn)剛度和扭轉(zhuǎn)阻尼;ks1,2和cs1,2為主軸兩端的彎曲剛度和彎曲阻尼;kij為各轉(zhuǎn)子盤兩端軸承的接觸剛度;cij為各轉(zhuǎn)子盤兩端軸承的結(jié)構(gòu)阻尼;kp和cp為軸承座的支持剛度和阻尼;l1和l2分別為主軸左右端軸段長度,由于結(jié)構(gòu)布局限制,主軸為非對稱結(jié)構(gòu),l1明顯大于l2。文中,i=1,2,3依次表示轉(zhuǎn)子盤1、轉(zhuǎn)子盤2、轉(zhuǎn)子盤3;j=1,2依次表示轉(zhuǎn)子盤左、右兩端。下文出現(xiàn)下標(biāo)i,j,定義相同。
1.1 轉(zhuǎn)子盤動力學(xué)模型
對系統(tǒng)單個轉(zhuǎn)子盤進(jìn)行受力分析,考慮轉(zhuǎn)子盤的偏心距,其受力分析如圖2所示。
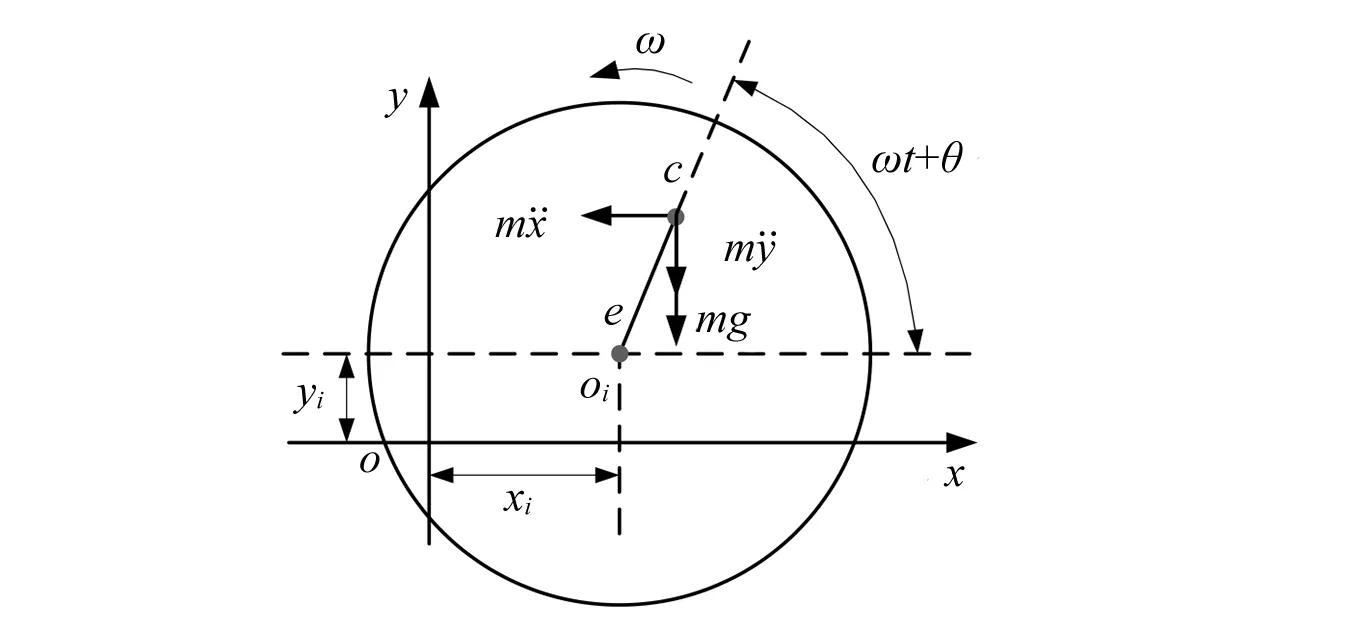
圖2 轉(zhuǎn)子盤受力分析圖Fig.2 Stress analysis diagram of rotor disc
圖2中:oi為轉(zhuǎn)子盤幾何中心,坐標(biāo)為(xi,yi);c為轉(zhuǎn)盤質(zhì)心,坐標(biāo)為(xc,yc);o為坐標(biāo)原點(diǎn);e為偏心距;ω為轉(zhuǎn)子盤轉(zhuǎn)速;θ為轉(zhuǎn)子盤扭角;φ=ωt+θ為轉(zhuǎn)盤轉(zhuǎn)角。根據(jù)幾何關(guān)系可以得到質(zhì)心c的坐標(biāo)為
(1)
1.2 軸承系統(tǒng)動力學(xué)模型
系統(tǒng)中軸承采用深溝球軸承,考慮軸承內(nèi)外圈水平和豎直方向振動,建立4自由度動力學(xué)模型[20-21],如圖3所示。圖3中:xin,o和yin,o為軸承內(nèi)、外圈在軸承橫截面內(nèi)水平方向和豎直方向的振動位移;min為內(nèi)圈質(zhì)量;mo為外圈質(zhì)量;kc為Hertz接觸剛度;ko為外圈剛度;cin為內(nèi)圈阻尼;co為外圈阻尼。
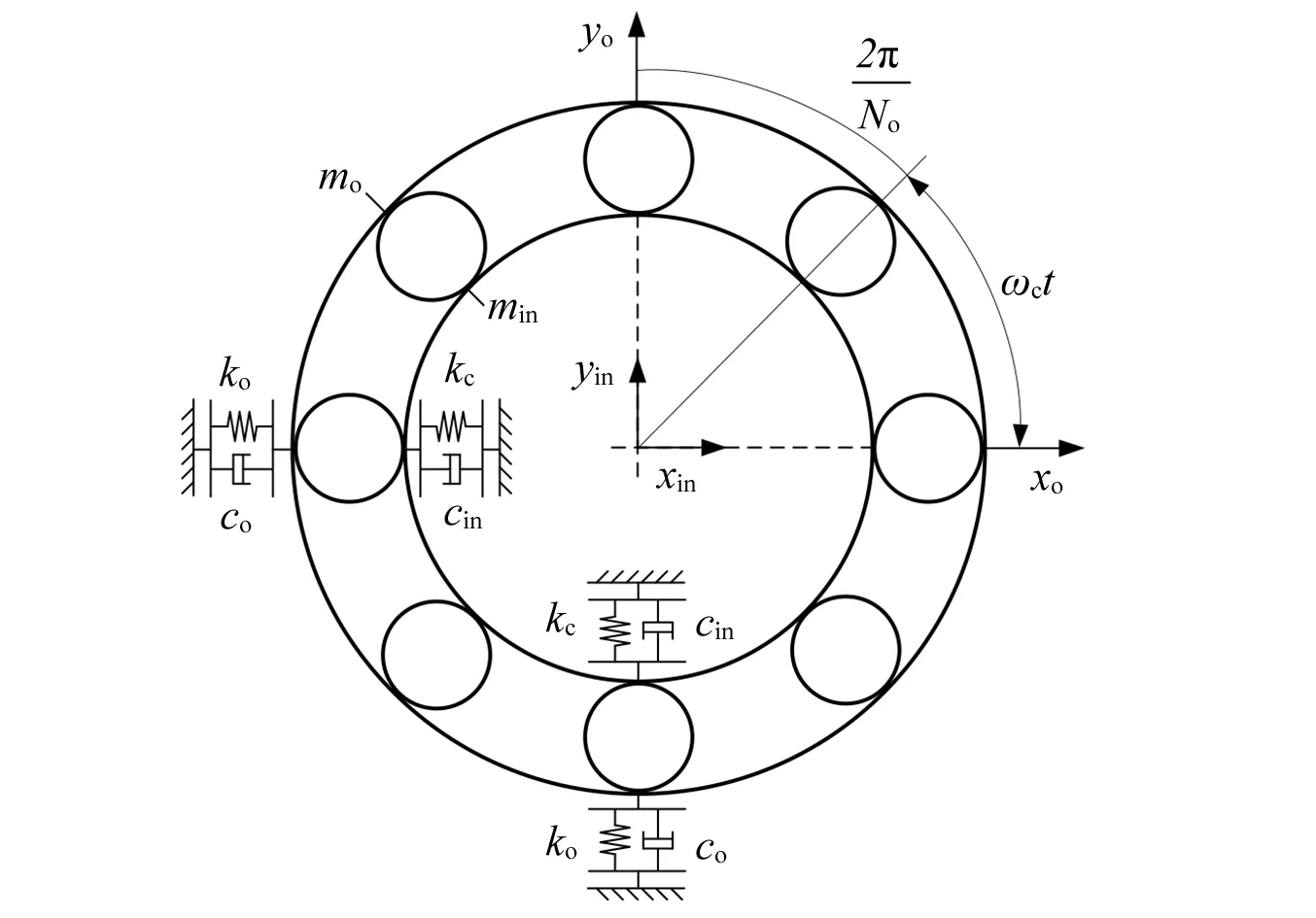
圖3 深溝球軸承動力學(xué)模型Fig.3 Dynamic model of deep groove ball bearing
根據(jù)牛頓第二定律,可得軸承系統(tǒng)的動力學(xué)方程為
(2)
式中:fx為x向接觸力;fy為y向接觸力;Fr為施加在軸承內(nèi)圈的y向載荷。
假設(shè)軸承外圈固定在軸承座上,內(nèi)圈轉(zhuǎn)動時(shí),滾珠在滾道上作純滾動。設(shè)滾珠個數(shù)為N0,則第n個滾珠經(jīng)過時(shí)間t后轉(zhuǎn)過的角度θn為
(3)
式中:ωc=ωind/(Dzc+dzc)為保持架角速度;ωin為內(nèi)圈轉(zhuǎn)速;dzc為軸承內(nèi)徑;Dzc為軸承外徑。
軸承第n個滾珠在角位移θn處與滾道的徑向接觸變形量為
δn=(xin-xo)cosθn+(yin-yo)sinθn-s
(4)
式中,s為徑向游隙。
根據(jù)Hertz接觸理論可得滾珠與滾道之間的非線性接觸力為
(5)
式中:Hn為接觸系數(shù),表征非線性接觸力是否存在; 當(dāng)δn>0時(shí),Hn=1,否則Hn=0;m為常數(shù),對于球軸承m=3/2。
綜上得軸承在水平和豎直方向總的接觸力為
(6)
1.3 主軸-軸承系統(tǒng)彎扭耦合動力學(xué)模型
考慮三個轉(zhuǎn)子盤集中質(zhì)量點(diǎn)在自身平面內(nèi)水平方向和豎直方向上的自由度x和y以及隨主軸軸線扭轉(zhuǎn)的自由度θ,根據(jù)質(zhì)心運(yùn)動定理和動量矩定理,建立主軸-軸承系統(tǒng)的動力學(xué)微分方程如下:
轉(zhuǎn)子1的動力學(xué)微分方程為
(7)
轉(zhuǎn)子2的動力學(xué)微分方程為
(8)
轉(zhuǎn)子3的動力學(xué)微分方程為
(9)
轉(zhuǎn)子處軸承座的動力學(xué)微分方程為
(10)
式中:T2為轉(zhuǎn)子盤2的外部激勵扭矩,即系統(tǒng)輸入扭矩;T1和T3分別為轉(zhuǎn)子盤1、轉(zhuǎn)子盤3的負(fù)載扭矩,即系統(tǒng)輸出扭矩;Tjl4和Tjl8分別為4倍和8倍發(fā)動機(jī)轉(zhuǎn)頻正弦激勵扭矩;fxij/fyij,fcxij/fcyij分別為軸承處的x/y向接觸力和x/y向結(jié)構(gòu)阻尼力,結(jié)構(gòu)阻尼力表達(dá)式為
(11)
式中,cij為各軸承的結(jié)構(gòu)阻尼。
2 主軸-軸承系統(tǒng)振動特性分析
本文研究的某特種車輛傳動主軸-軸承系統(tǒng)在一擋起步工況下出現(xiàn)主軸右端斷裂故障,如圖4所示。為探究主軸斷裂機(jī)理,開展一擋工況下的主軸振動特性分析,采用Runge-Kutta法對系統(tǒng)動力學(xué)方程進(jìn)行求解,取計(jì)算時(shí)間步長2×10-6s。一擋工況參數(shù)如表1所示。給定主軸結(jié)構(gòu)幾何參數(shù)如表2所示。系統(tǒng)支撐軸承依據(jù)文獻(xiàn)[22]計(jì)算可得軸承系統(tǒng)各仿真參數(shù)。

圖4 主軸斷裂故障件外觀Fig.4 Appearance of failure parts of spindle fracture
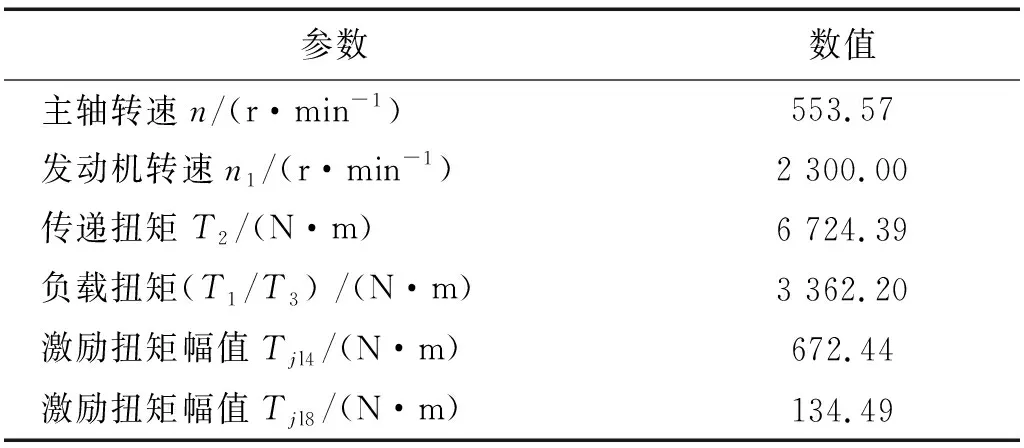
表1 系統(tǒng)一擋工況參數(shù)表Tab.1 System first gear working condition parameter table
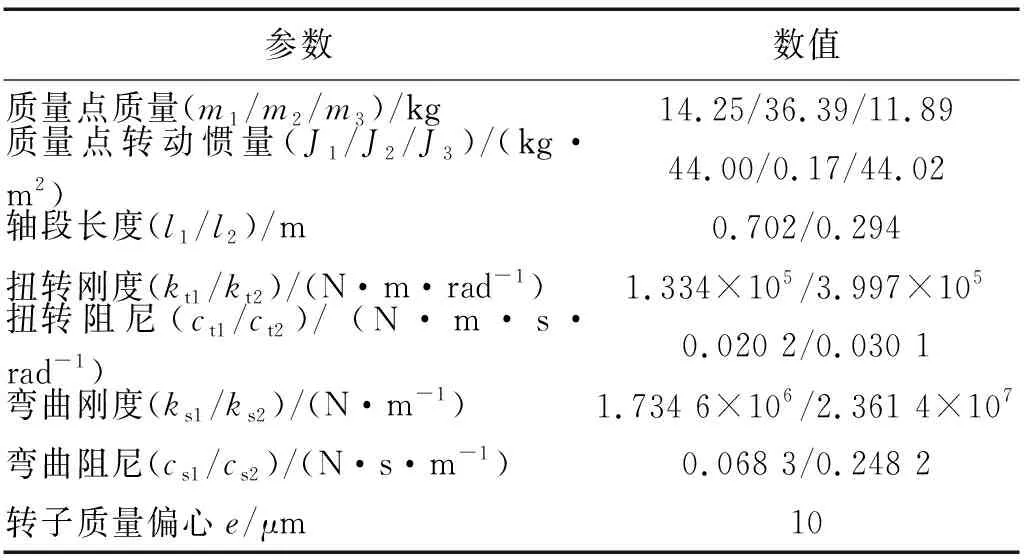
表2 主軸結(jié)構(gòu)幾何參數(shù)表Tab.2 Table of geometric parameters of spindle structure
2.1 主軸-軸承系統(tǒng)扭轉(zhuǎn)振動特性分析

(12)
(13)
式中:Tb1,Tb3分別為左右軸段的波動扭矩;WT1,WT3分別為左右軸段的扭轉(zhuǎn)振動能量。
一擋工況下,主軸的扭轉(zhuǎn)角位移、扭轉(zhuǎn)角加速度、波動扭矩和扭轉(zhuǎn)振動能量,如圖5所示。該工況下,主軸左右軸段扭轉(zhuǎn)振動響應(yīng)有較大差異,左右軸段的扭轉(zhuǎn)角位移幅值和扭轉(zhuǎn)角加速度幾乎相同,但左端軸段由于扭轉(zhuǎn)剛度較小在偏離平衡位置更大的位置來回扭轉(zhuǎn);右端軸段的波動扭矩峰值達(dá)到900 N·m,遠(yuǎn)大于左端軸段的400 N·m,這是導(dǎo)致主軸右端斷裂的一個主要原因;同時(shí),主軸右段的扭轉(zhuǎn)振動能量峰值達(dá)到200 W,也大于左端軸段的扭轉(zhuǎn)振動能量峰值。由此可見,一擋工況下主軸右端軸段的扭轉(zhuǎn)振動劇烈程度要遠(yuǎn)大于主軸左端。
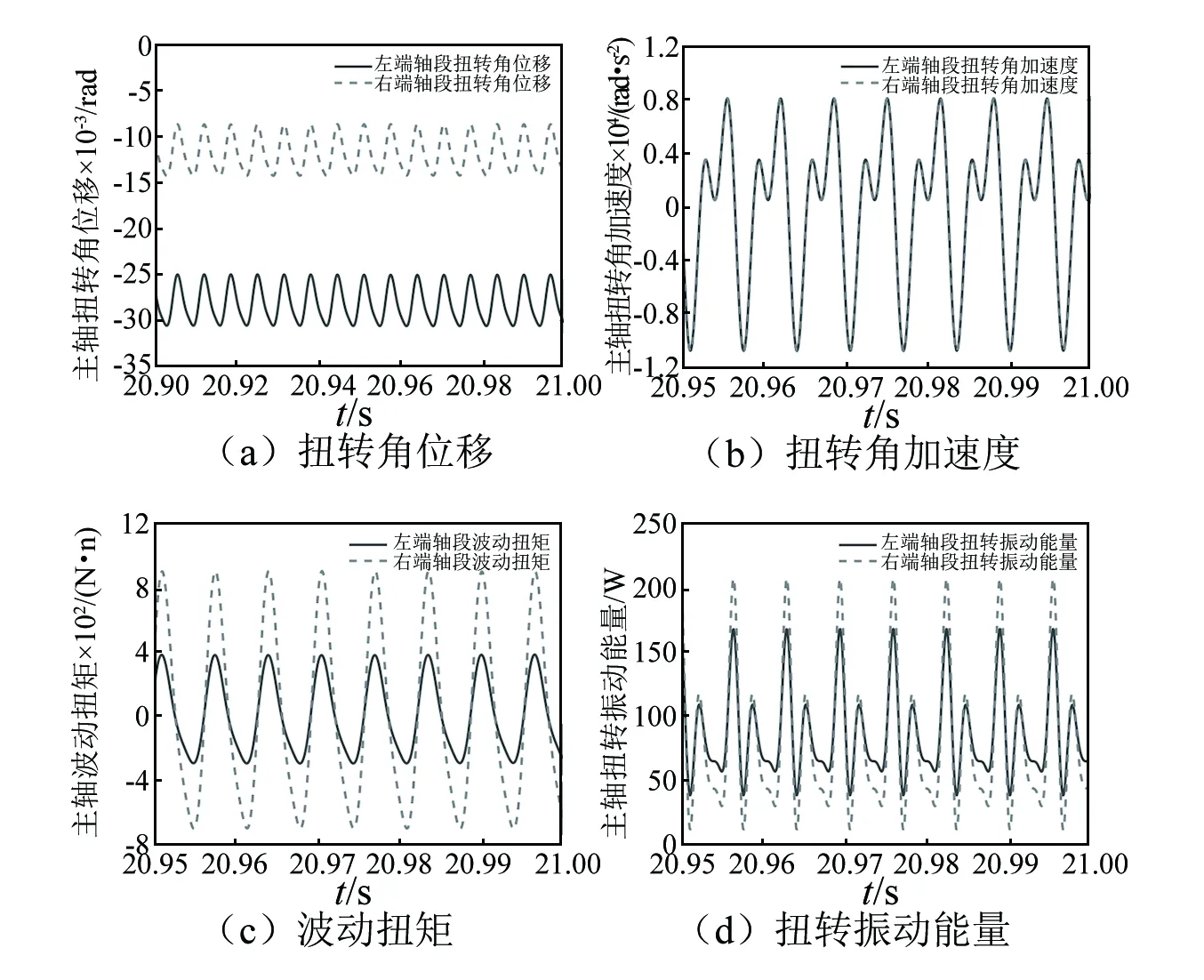
圖5 主軸扭轉(zhuǎn)振動特性Fig.5 Torsional vibration characteristics of spindle
2.2 主軸-軸承系統(tǒng)彎曲振動特性分析
與扭轉(zhuǎn)振動特性分析相同,將相鄰轉(zhuǎn)子盤質(zhì)量點(diǎn)x,y向位移和加速度相減便可得到主軸軸段x,y向位移和加速度,同時(shí)引入彎曲振動動載荷和彎曲振動能量,定義為
(14)
(15)
(16)
式中:f1,f3分別為左右軸段彎曲動載荷;W1,W3分別為左右軸段彎曲振動能量。
一擋工況下,主軸的彎曲振動位移、加速度、彎曲動載荷和彎曲振動能量,如圖6所示。在該工況下,主軸左右軸段的彎曲振動亦有明顯差異。由于左端軸段的彎曲剛度較小,左端軸段x,y向位移都要大于右端軸段位移,且左端軸段的橫向彎曲加速度要略大于右端軸段橫向彎曲加速度;右端軸段的彎曲動載荷峰值達(dá)到150 N,而左端軸段的彎曲動載荷峰值僅為15 N,雖然右端的橫向彎曲位移較小,但右端軸段的彎曲剛度較大,可見軸段彎曲剛度是影響彎曲動載荷的主要因素;同時(shí),主軸右段的彎曲振動能量也顯著大于左端軸段的扭轉(zhuǎn)振動能量。
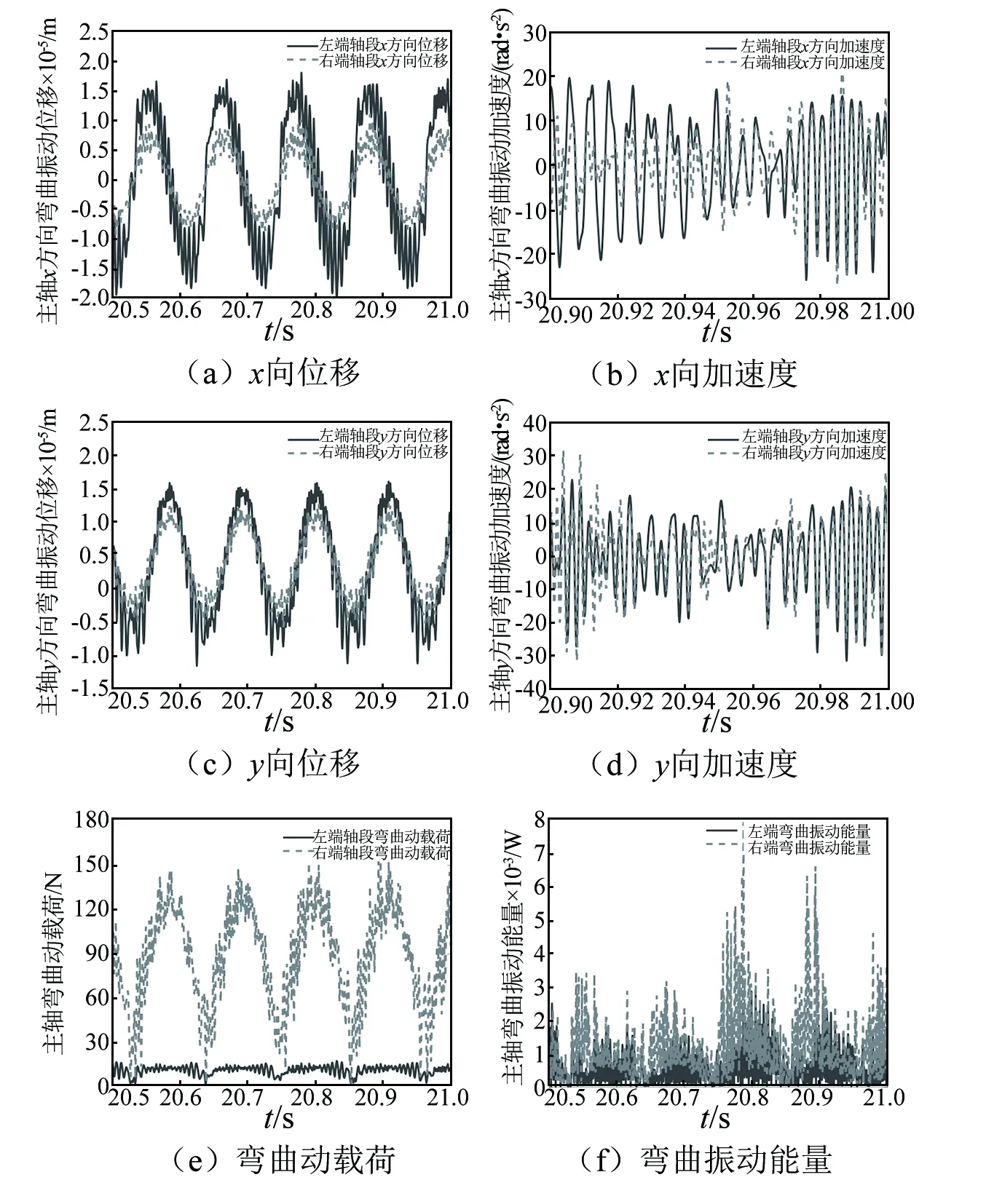
圖6 主軸彎曲振動特性Fig.6 Bending vibration characteristics of spindle
考慮轉(zhuǎn)子盤質(zhì)量偏心,轉(zhuǎn)子盤彎曲振動與扭轉(zhuǎn)振動存在彎扭耦合效應(yīng),且隨著偏心距的增加耦合效應(yīng)愈明顯。綜合系統(tǒng)彎扭耦合振動可以得出結(jié)論:系統(tǒng)在一擋起步工況下需要傳遞大扭矩,扭轉(zhuǎn)振動響應(yīng)要遠(yuǎn)遠(yuǎn)劇烈于彎曲振動響應(yīng);右端波動扭矩峰值達(dá)到了900 N·m,而右端彎曲動載荷峰值僅為150 N,扭轉(zhuǎn)振動能量的數(shù)值也遠(yuǎn)遠(yuǎn)大于橫向振動能量數(shù)值,由此可見主軸是“扭斷”的。對比Zhao等對同一研究對象開展的有限元仿真研究,如圖7所示,當(dāng)主軸的輸入扭矩為26 000 N·m時(shí),左右軸段上的應(yīng)力分布值分別為285.9 MPa和502.6 MPa,右側(cè)軸段的應(yīng)力值是左側(cè)的2倍左右,與本文數(shù)值計(jì)算得到的結(jié)論基本一致。為進(jìn)一步驗(yàn)證本文仿真結(jié)果的正確性,對主軸進(jìn)行斷口檢查、金相觀察和拉伸沖擊測試等試驗(yàn),如圖8所示,得出主軸的斷裂模式為扭轉(zhuǎn)疲勞斷裂,裂紋起源于距端面約50 mm處的花鍵底部,周向多源萌生向心部拓展,并最終斷裂,亦驗(yàn)證了本文數(shù)值仿真所得結(jié)論。
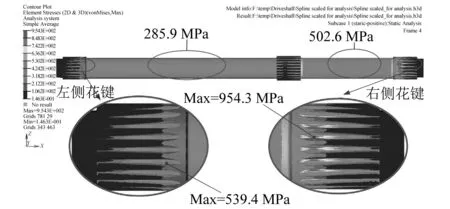
圖7 主軸應(yīng)力分布圖Fig.7 Stress distribution of main shaft
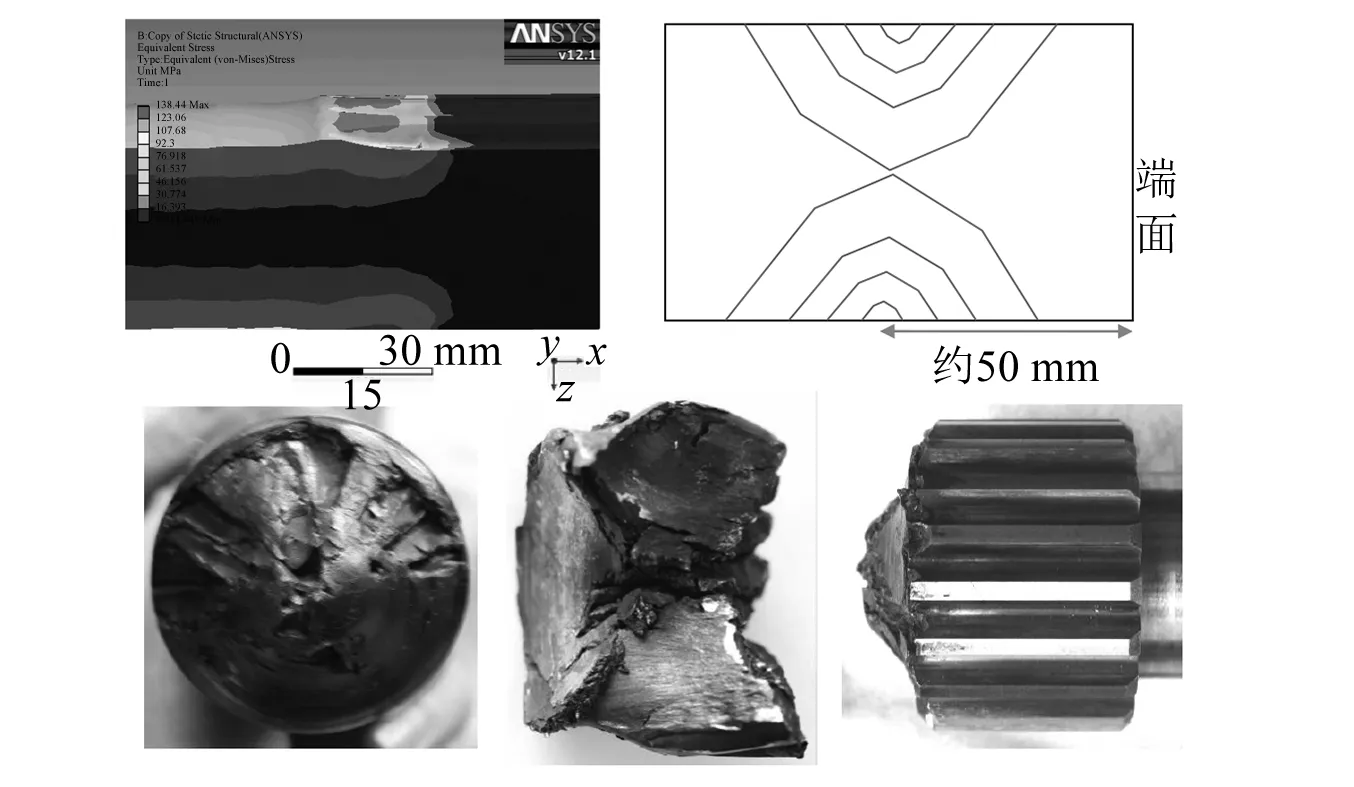
圖8 斷裂萌生與拓展示意圖Fig.8 Sketch map of fracture initiation and development
3 改進(jìn)PSO算法
3.1 標(biāo)準(zhǔn)PSO算法

(17)
(18)
式中:ω為慣性因子;t為迭代次數(shù);vij為粒子速度,xij為粒子位置;c1,c2為學(xué)習(xí)因子;r1,r2為介于[0,1]的隨機(jī)數(shù)。
3.2 改進(jìn)PSO算法
PSO算法針對不同問題優(yōu)化時(shí),無法保證每一次的結(jié)果都收斂到全局最優(yōu)解,易陷入局部最優(yōu)解。為了提高PSO算法的全局搜索能力和搜索效率,對標(biāo)準(zhǔn)粒子群算法進(jìn)行如下改進(jìn):
3.2.1 添加遞減慣性因子
較大的慣性因子有利于提高算法的全局尋優(yōu)能力,反之則可以保證粒子在最優(yōu)解附近精細(xì)搜索。為了平衡算法的全局和局部的搜索能力,在迭代過程中線性地減小ω的值,定義為[24]
(19)
式中:t為粒子群當(dāng)前迭代次數(shù);tmax為粒子群總迭代次數(shù);ωmax和ωmin分別為最大、最小慣性因子。
研究表明,對于多數(shù)優(yōu)化問題,在ωmax和ωmin相同情況下,凹函數(shù)遞減策略優(yōu)于線性策略[25],定義為
(20)
3.2.2 改進(jìn)學(xué)習(xí)因子
(21)
3.2.3 變異操作
基于標(biāo)準(zhǔn)PSO算法引入一種新穎的變異操作,在粒子進(jìn)行前一半迭代的過程中,對上一步得到的粒子群進(jìn)行變異操作,隨著迭代次數(shù)的疊加,變異操作對粒子群的影響隨之減小,如圖9所示,用以提高粒子的全局搜索能力。變異操作的偽代碼如表3所示。
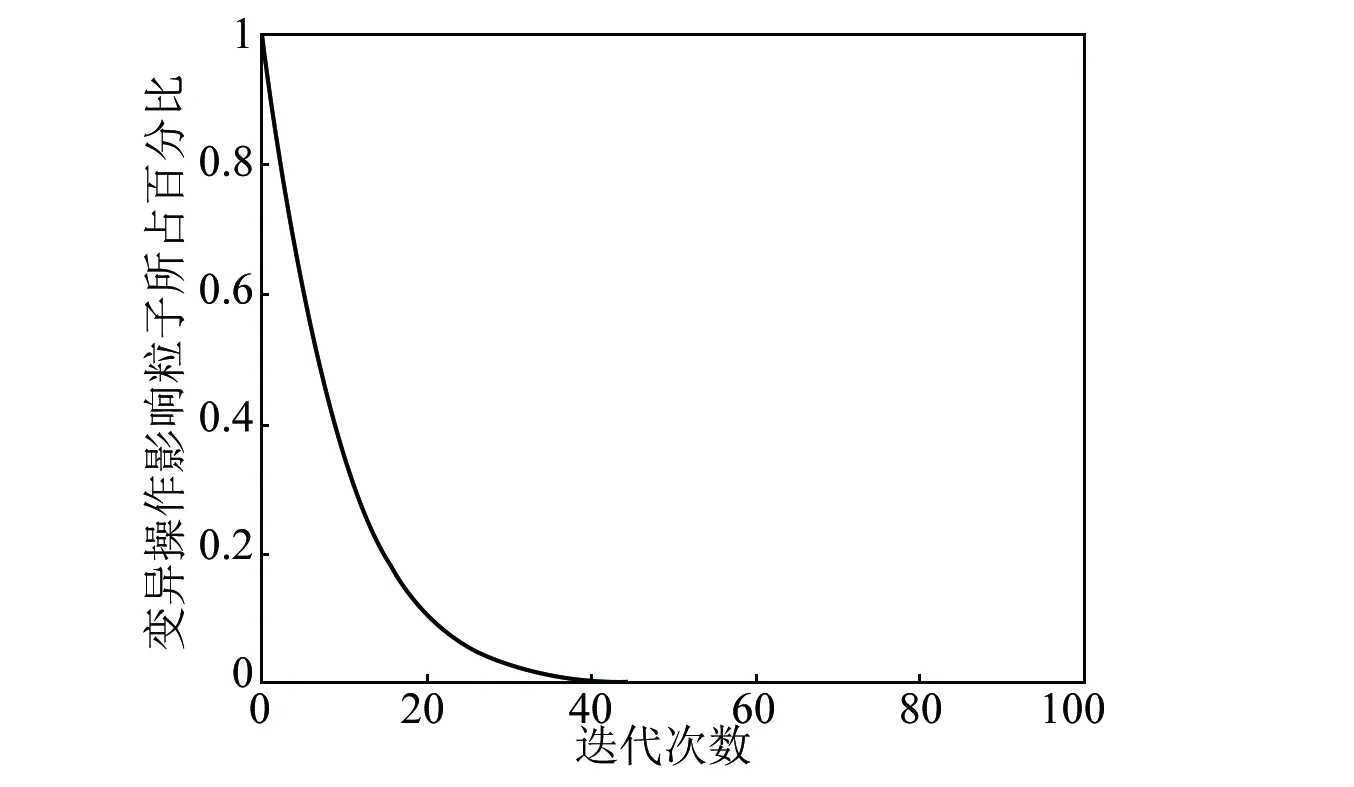
圖9 受變異操作影響粒子所占百分比Fig.9 Percentage of particles affected by mutation operation
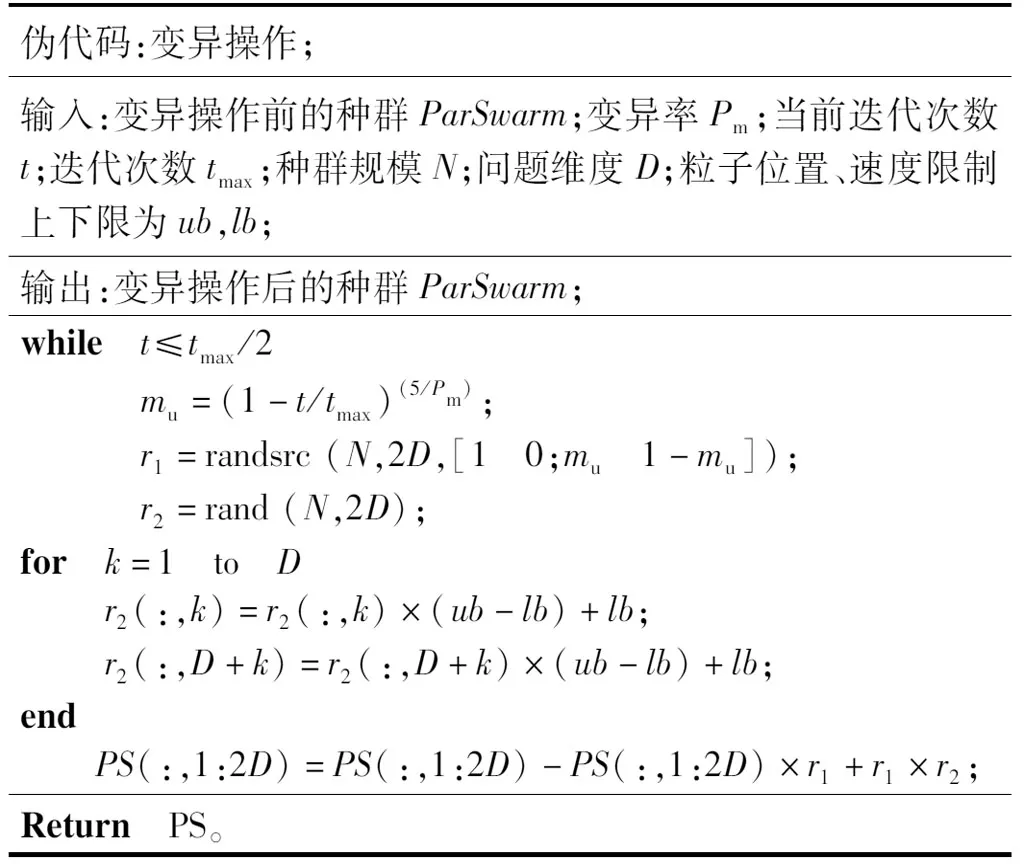
表3 變異操作偽代碼Tab.3 Variation operation pseudo code
4 主軸結(jié)構(gòu)參數(shù)多目標(biāo)優(yōu)化
基于所提出的改進(jìn)PSO算法對傳動主軸結(jié)構(gòu)參數(shù)進(jìn)行優(yōu)化設(shè)計(jì)。將主軸結(jié)構(gòu)參數(shù)優(yōu)化看作為一個具有n個優(yōu)化目標(biāo)和u個約束條件的多目標(biāo)非線性優(yōu)化問題,則多目標(biāo)參數(shù)優(yōu)化問題描述為
Ffitness(x)=best{f1(x),f2(x),…,fn(x)},x∈T
(22)
T={x∈Rm,G∶gi min≤gi(x)≤gi max,i=1,…,u}
(23)
式中:f1(x),f2(x),…,fn(x)分別為第1~第n個優(yōu)化設(shè)計(jì)目標(biāo);T為約束條件;Rm為設(shè)計(jì)變量域;G為變量約束;n為設(shè)計(jì)目標(biāo)維數(shù);m為設(shè)計(jì)變量維數(shù);u為約束個數(shù)。
4.1 設(shè)計(jì)優(yōu)化目標(biāo)
主軸斷裂的主要原因?yàn)椋褐鬏S左右軸段動態(tài)扭矩和扭轉(zhuǎn)振動能量由于結(jié)構(gòu)不對稱相差較大,主軸右端扭轉(zhuǎn)振動響應(yīng)較左端軸段劇烈。因此,選取主軸左右軸段波動扭矩差值和振動能量差值為優(yōu)化目標(biāo),同時(shí)為防止主軸扭轉(zhuǎn)振動更加劇烈,將主軸左右軸段波動扭矩總和及振動能量總和作為優(yōu)化目標(biāo):
目標(biāo)函數(shù)1
f1(x)=min(T3-T1)
(24)
目標(biāo)函數(shù)2
f2(x)=min(WT3-WT1)
(25)
目標(biāo)函數(shù)3
f3(x)=min(T1+T3)
(26)
目標(biāo)函數(shù)4
f4(x)=min(WT3+WT1)
(27)
4.2 設(shè)計(jì)優(yōu)化變量
通過靈敏度分析發(fā)現(xiàn),為了降低波動扭矩和扭轉(zhuǎn)振動能量,應(yīng)該先優(yōu)化扭轉(zhuǎn)剛度kt2和轉(zhuǎn)動慣量J2,其次為扭轉(zhuǎn)剛度kt1和軸承游隙。但轉(zhuǎn)動慣量J2為累加的整車慣量無法改變,軸承游隙為裝配工藝所決定,因此應(yīng)優(yōu)先考慮優(yōu)化主軸的扭轉(zhuǎn)剛度降低波動扭矩和扭轉(zhuǎn)振動能量。
扭轉(zhuǎn)剛度計(jì)算公式為[26]
(28)
(29)
由上式可知,扭轉(zhuǎn)剛度K與材料的剪切彈性模量G、軸段橫截面對圓心的極慣性矩Ip和軸段長度l有關(guān),但主軸常用材料的剪切彈性模量大致相同,同時(shí)系統(tǒng)中主軸軸段長度受到結(jié)構(gòu)限制不可更改,因此只能夠通過優(yōu)化主軸內(nèi)徑和外徑來改變Ip來實(shí)現(xiàn)主軸的扭轉(zhuǎn)剛度優(yōu)化。當(dāng)主軸的外徑D保持不變,內(nèi)徑d即使取到0.5D這樣大的數(shù)值時(shí),Ip依然為原來的15/16,表明軸段內(nèi)徑對極慣性矩的影響很小,應(yīng)優(yōu)先考慮優(yōu)化主軸外徑D來尋得系統(tǒng)的最佳結(jié)構(gòu)參數(shù)。同時(shí),對于主軸左右軸段的扭轉(zhuǎn)剛度來說,當(dāng)外徑相同時(shí),扭轉(zhuǎn)剛度的比值趨近于一個定值,那么結(jié)構(gòu)不對稱帶來的抗振能力差異和載荷分配不均就會一直存在,因此應(yīng)考慮將主軸的左右軸段外徑取不同的數(shù)值,以實(shí)現(xiàn)最優(yōu)的主軸扭轉(zhuǎn)振動響應(yīng)。
綜合考慮,設(shè)計(jì)優(yōu)化變量為
x=[dldrDlDr]
(30)
式中,dl,r和Dl,r分別為主軸左右軸段的內(nèi)徑和外徑。
4.3 設(shè)計(jì)變量約束
優(yōu)化變量的基準(zhǔn)值為原始主軸結(jié)構(gòu)參數(shù),由減少主軸扭轉(zhuǎn)振動波動扭矩和振動能量為要求,確定變量dl,dr,Dl,Dr的取值范圍,約束條件為
dl,dr∈[0,20],Dl,Dr∈[50,70]
(31)
傳動主軸結(jié)構(gòu)在穩(wěn)態(tài)工況下,由于內(nèi)外激勵共同作用,承受多種交變載荷,在進(jìn)行優(yōu)化設(shè)計(jì)時(shí)必須考慮主軸危險(xiǎn)部位的應(yīng)力和應(yīng)變,確保其有足夠的強(qiáng)度和剛度,因此需要約束主軸危險(xiǎn)截面的應(yīng)力和應(yīng)變小于許用值。為此引入懲罰函數(shù),表示為
(32)
式中:Fi(x)為新的目標(biāo)函數(shù);M為罰因子,是一個正常數(shù);m為約束條件個數(shù);gj(x)為約束條件。當(dāng)M充分大時(shí),F(xiàn)i(x)的最優(yōu)解能逼近原始約束問題的最優(yōu)解。
4.4 多目標(biāo)優(yōu)化框架
利用MATLAB軟件編寫主軸模型和改進(jìn)PSO算法,在改進(jìn)PSO算法中嵌入主軸模型進(jìn)行求解,計(jì)算主軸波動扭矩和扭轉(zhuǎn)振動能量作為優(yōu)化算法的目標(biāo)函數(shù)。多目標(biāo)優(yōu)化的設(shè)置為:種群大小N為100,最大迭代次數(shù)為tmax為100,最大慣性因子ωmax為0.9,最小慣性因子ωmin為0.4,變異率Pm為0.5。本文所提出的多目標(biāo)優(yōu)化流程如圖10所示。
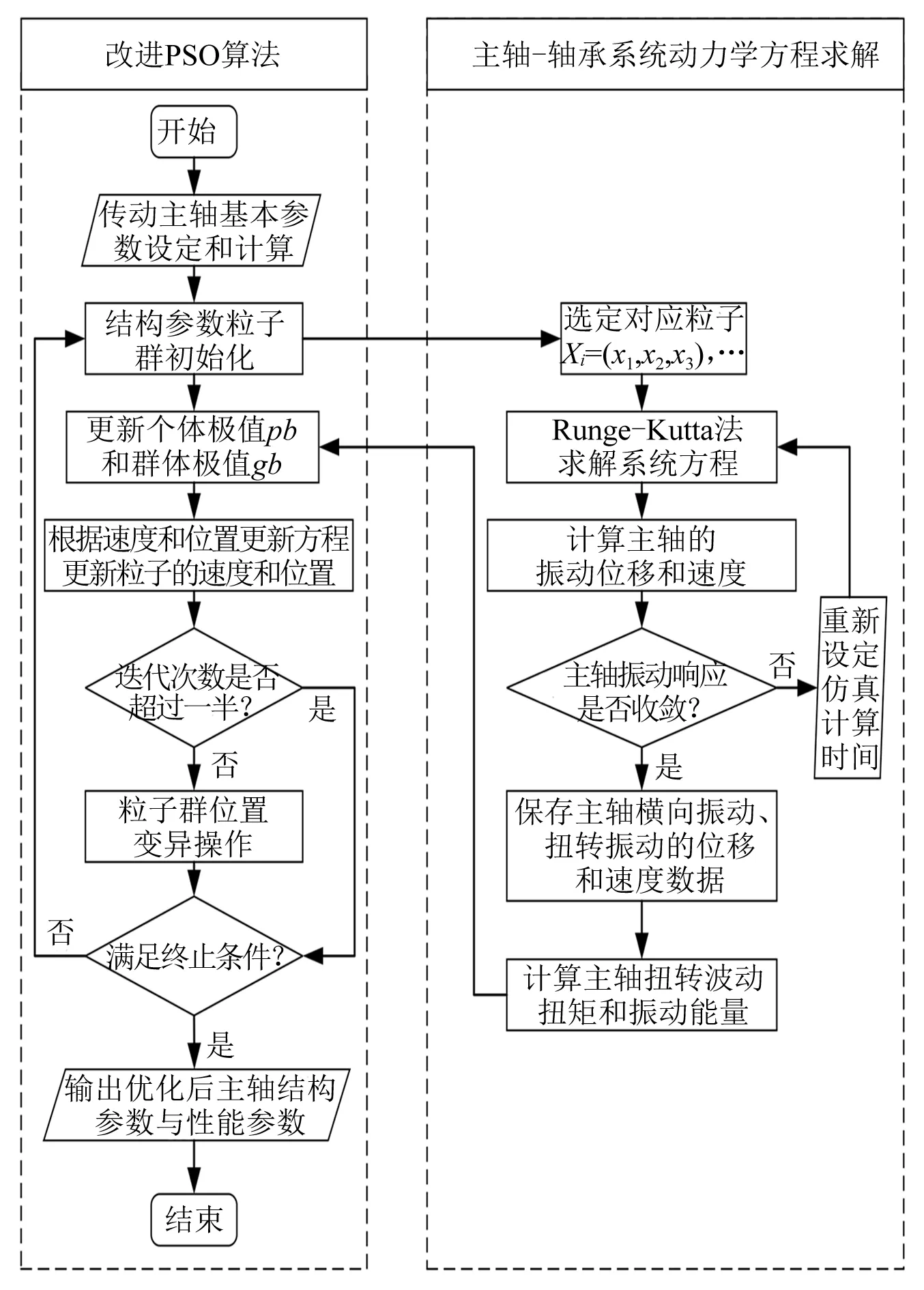
圖10 基于改進(jìn)PSO的多目標(biāo)優(yōu)化流程Fig.10 Multi objective optimization process based on improved PSO
4.5 Pareto解集選優(yōu)

(33)
定義支配函數(shù)φk,第k個解的支配值為
(34)
式中:l為Pareto解集中解的數(shù)目,根據(jù)模型的優(yōu)化結(jié)果得到;n為主軸優(yōu)化設(shè)計(jì)目標(biāo)個數(shù)。
由支配函數(shù)φk計(jì)算公式,可得Pareto解集中每個非劣解的支配值,支配值反應(yīng)了該解的綜合性能,選擇具有較大支配值的解為最優(yōu)解。
4.6 優(yōu)化結(jié)果分析
優(yōu)化所得Pareto解集采用支配值計(jì)算公式計(jì)算得到的支配值,如圖11所示。第18號粒子具有最大支配值,對應(yīng)主軸設(shè)計(jì)變量及其優(yōu)化前后數(shù)值,如表4所示。
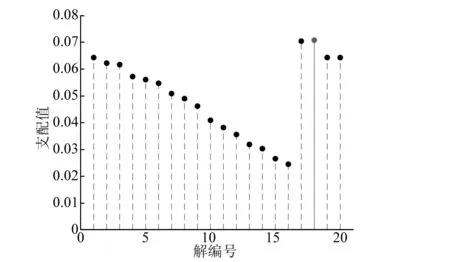
圖11 Pareto最優(yōu)解集的支配函數(shù)值Fig.11 The dominating function value of Pareto optimal solution
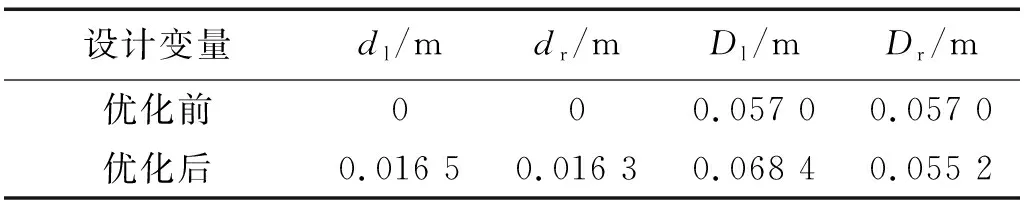
表4 設(shè)計(jì)變量優(yōu)化結(jié)果Tab.4 Optimization results of design variables
根據(jù)表4所得主軸優(yōu)化前后結(jié)構(gòu)參數(shù),對優(yōu)化前后主軸波動扭矩和扭轉(zhuǎn)振動能量進(jìn)行對比分析,分別如圖12和13所示。
由圖12和圖13分析可知,主軸經(jīng)過參數(shù)優(yōu)化后,系統(tǒng)的波動扭矩和扭轉(zhuǎn)振動能量整體上來看得到明顯減小,同時(shí)主軸兩端軸段振動不平衡得到明顯改善。右端的波動扭矩峰值從900.60 N·m降低到646.60 N·m,左端的波動扭矩峰值有所增加,從378.90 N·m增加到644.80 N·m;右端的扭轉(zhuǎn)振動能量峰值從207.00 W下降到178.30 W,左端的扭轉(zhuǎn)振動能量峰值幾乎保持不變。從對扭轉(zhuǎn)振動的優(yōu)化效果來看,使主軸整體性能達(dá)到最優(yōu)的多目標(biāo)優(yōu)化目的已達(dá)到,但是無法避免左端軸段的局部扭轉(zhuǎn)動載荷有所增加。
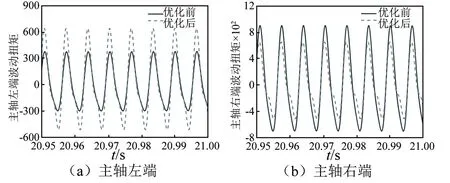
圖12 主軸波動扭矩優(yōu)化前后對比Fig.12 Comparison of spindle fluctuating torque before and after optimization
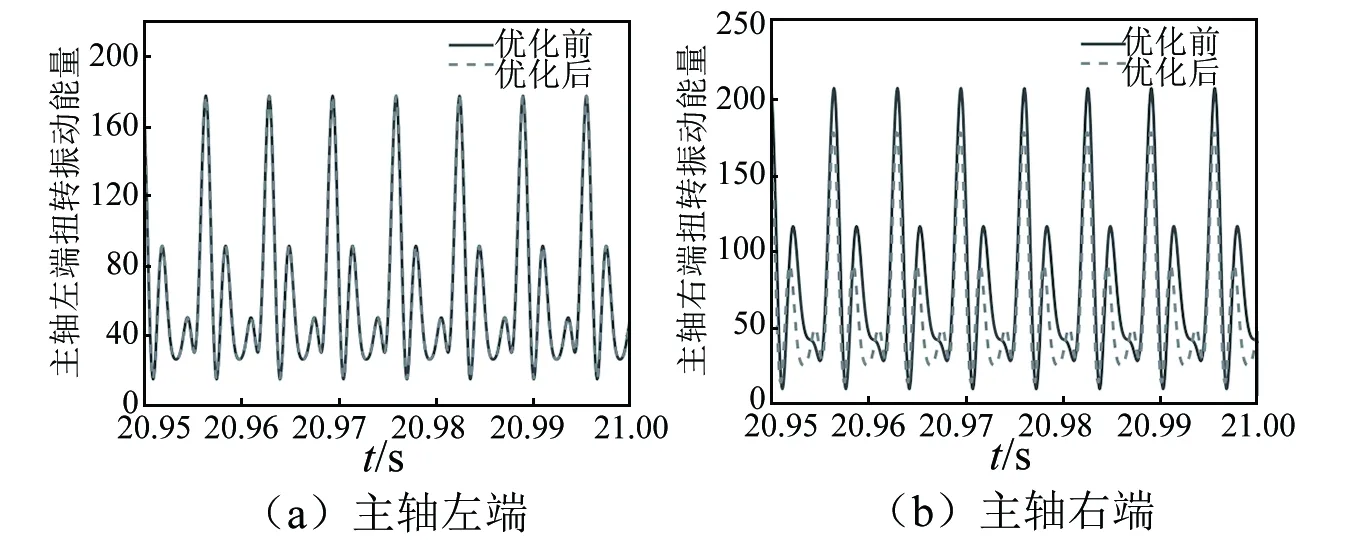
圖13 主軸扭轉(zhuǎn)振動能量優(yōu)化前后對比Fig.13 Comparison of torsional vibration energy before and after optimization
雖然主軸是在一擋起步工況下出現(xiàn)的主軸右端斷裂故障,但僅僅針對一擋工況下的系統(tǒng)扭轉(zhuǎn)振動進(jìn)行優(yōu)化可能會加劇主軸系統(tǒng)在其余工況下的振動響應(yīng),因此考慮主軸常用工作擋位的多工況優(yōu)化設(shè)計(jì)。系統(tǒng)常用擋位工況參數(shù),如表5所示,經(jīng)支配函數(shù)計(jì)算公式計(jì)算得到的各工況下優(yōu)化結(jié)果,如表6所示。

表5 主軸-軸承系統(tǒng)各擋位工況參數(shù)Tab.5 Working condition parameters of spindle bearing system in each gear
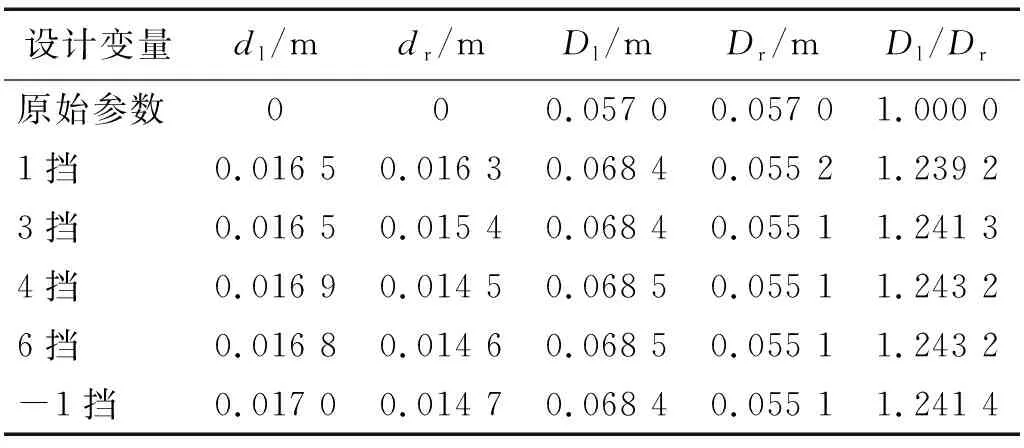
表6 設(shè)計(jì)變量優(yōu)化結(jié)果對比Tab.6 Comparison of optimization results of design variables
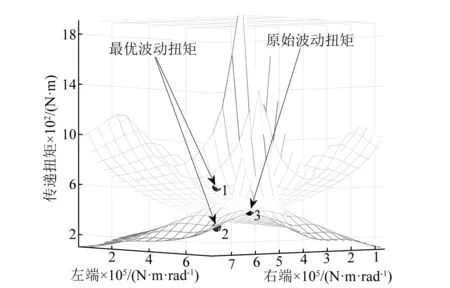
圖14 波動扭矩隨左右軸端扭轉(zhuǎn)剛度變化規(guī)律Fig.14 Variation of fluctuating torque with torsional stiffness of left and right shaft ends
5 結(jié) 論
綜合考慮傳動主軸-軸承系統(tǒng)內(nèi)外多源非線性激勵,采用集中質(zhì)量法建立了系統(tǒng)非線性振動模型,通過數(shù)值計(jì)算得到了系統(tǒng)在一擋工況下的彎扭耦合振動響應(yīng),并基于此分析了主軸斷裂的主要原因。針對傳統(tǒng)PSO算法易陷入局部最優(yōu)問題,對PSO的參數(shù)進(jìn)行自適應(yīng)調(diào)整并引入變異操作,提出一種改進(jìn)的PSO算法。基于所提出改進(jìn)的PSO算法對非對稱主軸結(jié)構(gòu)進(jìn)行了多目標(biāo)優(yōu)化設(shè)計(jì),得到了以下結(jié)論:
(1) 傳動主軸-軸承系統(tǒng)雖然存在由于轉(zhuǎn)子質(zhì)量偏心引起的彎扭耦合效應(yīng),但主軸承受的載荷主要是扭矩,系統(tǒng)扭轉(zhuǎn)振動響應(yīng)程度要遠(yuǎn)遠(yuǎn)劇烈于彎曲振動響應(yīng);而由于布局限制,主軸兩側(cè)為長短不同的非對稱非等強(qiáng)度結(jié)構(gòu),右側(cè)軸段在工作時(shí)要承擔(dān)更大的輸出扭矩,其波動扭矩幅值為左側(cè)的2倍左右,這使主軸右端軸段更早的達(dá)到扭轉(zhuǎn)疲勞極限進(jìn)而發(fā)生斷裂。
(2) 針對傳動主軸右側(cè)斷裂原因,利用改進(jìn)的PSO算法對非對稱主軸結(jié)構(gòu)參數(shù)進(jìn)行多工況優(yōu)化設(shè)計(jì)。優(yōu)化結(jié)果表明,當(dāng)Dl=68.5 mm,Dr=55.1 mm時(shí),主軸左右兩側(cè)處于等強(qiáng)度設(shè)計(jì),此時(shí)系統(tǒng)整體的扭轉(zhuǎn)振動響應(yīng)達(dá)到一個最優(yōu)的平衡位置,右側(cè)波動扭矩幅值下降25%左右,右側(cè)扭轉(zhuǎn)振動能量下降15%左右,優(yōu)化后的主軸系統(tǒng)載荷分配更加合理,優(yōu)化效果明顯。
(3) 本文研究工作揭示了某特種車輛傳動主軸在一擋工況下發(fā)生右端斷裂失效的根本原因,針對斷裂原因基于改進(jìn)的PSO算法對主軸結(jié)構(gòu)進(jìn)行了優(yōu)化,所得優(yōu)化結(jié)果對于類似非對稱非等強(qiáng)度設(shè)計(jì)結(jié)構(gòu)的結(jié)構(gòu)優(yōu)化具有指導(dǎo)意義。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40