冗余六自由度并聯(lián)隔振平臺(tái)多維隔振性能研究
2022-02-16 01:18:00蔡佳敏蔣子良朱方正湯少東錢(qián)鵬飛
振動(dòng)與沖擊 2022年2期
關(guān)鍵詞:振動(dòng)
張 兵, 黃 華, 蔡佳敏, 蔣子良, 朱方正, 湯少東, 錢(qián)鵬飛
(江蘇大學(xué) 機(jī)械工程學(xué)院,江蘇 鎮(zhèn)江 212013)
高端精密設(shè)備在動(dòng)態(tài)環(huán)境下(如艦載、機(jī)載、車載等)憑借其靈活性好、可靠性高和適應(yīng)性強(qiáng)等特點(diǎn),被廣泛應(yīng)用在軍事、國(guó)防以及民用設(shè)施等領(lǐng)域,如艦載雷達(dá)、艦載武器系統(tǒng)等。但是動(dòng)態(tài)載體下的精密設(shè)備在工作或轉(zhuǎn)場(chǎng)中會(huì)受到各種環(huán)境振動(dòng)的影響,導(dǎo)致其壽命和精度被降低,嚴(yán)重時(shí)甚至造成設(shè)備因共振而失效[1-2]。因此,在設(shè)備工作過(guò)程中必須采取措施對(duì)其受到的振動(dòng)進(jìn)行有效的隔離和緩沖,降低環(huán)境振動(dòng)對(duì)設(shè)備產(chǎn)生的影響,從而保證設(shè)備在所處工況下能夠穩(wěn)定而可靠地正常工作。在工程實(shí)際應(yīng)用中,盡管很多復(fù)雜的精密設(shè)備在產(chǎn)品設(shè)計(jì)階段已經(jīng)采取了一定的防振措施,但是這種減振方法已經(jīng)無(wú)法滿足需求,振動(dòng)抑制效果不明顯。為了促進(jìn)動(dòng)載設(shè)備的發(fā)展,必須綜合其相關(guān)設(shè)計(jì)參數(shù)和使用工況等因素,開(kāi)發(fā)合適的隔振系統(tǒng)。
隨著計(jì)算機(jī)水平和電子科學(xué)技術(shù)水平的不斷提高,隔振對(duì)象的研究已從簡(jiǎn)單的剛體發(fā)展為復(fù)雜的可變?nèi)嵝泽w[3];隔振元件的研究已經(jīng)從阻尼彈簧的被動(dòng)隔振到磁流變的半主動(dòng)隔振再到各種智能作動(dòng)器的主動(dòng)隔振[4];隔振系統(tǒng)的研究范圍已經(jīng)從忽略各種非時(shí)變因素和條件的線性系統(tǒng)到越來(lái)越接近實(shí)際工況的非線性系統(tǒng)[5-7]。Lee等[8]提出一種結(jié)合音圈電機(jī)和液壓阻尼器的三參數(shù)混合驅(qū)動(dòng)器構(gòu)成“立方”并聯(lián)機(jī)構(gòu),并且輔以陷波器實(shí)現(xiàn)衛(wèi)星反作用輪引起的振動(dòng)隔振。Kong等[9]發(fā)明音圈電機(jī)和壓電陶瓷作動(dòng)器構(gòu)成雙級(jí)驅(qū)動(dòng)器的Stewart 并聯(lián)機(jī)構(gòu)來(lái)實(shí)現(xiàn)LOS系統(tǒng)的高精度制導(dǎo)和高性能隔振,工作過(guò)程中大行程運(yùn)動(dòng)和小范圍精確調(diào)整分別由兩種作動(dòng)器協(xié)同工作,但是控制相對(duì)復(fù)雜。劉小雨等[10]以空氣彈簧主動(dòng)隔振器為仿真和試驗(yàn)對(duì)象,采用相位補(bǔ)償?shù)那梆伩刂撇呗裕纳屏饲梆佂ǖ垒敵龅膶?shí)際控制力,試驗(yàn)證明控制策略有效,隔振效果顯著。牛牧青等[11]基于Jiles-Atherton模型,建立了主被動(dòng)隔振裝置的動(dòng)力學(xué)模型,分析了主動(dòng)驅(qū)動(dòng)裝置與被動(dòng)隔振裝置間的耦合作用。
本研究提出一種液壓冗余式、主被動(dòng)復(fù)合支撐的六自由度并聯(lián)隔振平臺(tái)。采用模糊PID復(fù)合控制策略進(jìn)行仿真分析,結(jié)果表明基于該控制策略的主被動(dòng)混合隔振明顯優(yōu)于被動(dòng)隔振,能夠衰減90%以上的振動(dòng)干擾,擴(kuò)大了隔振頻率的帶寬。
1 冗余六自由度并聯(lián)隔振平臺(tái)設(shè)計(jì)
普通六自由度隔振臺(tái)只有六個(gè)激振器,而冗余六自由度隔振平臺(tái)激振器數(shù)目大于受控自由度數(shù),對(duì)于大型多軸隔振平臺(tái),為了提高抗傾覆能力以及保證穩(wěn)定性,往往采用冗余式。冗余六自由度并聯(lián)隔振平臺(tái)三維模型,如圖1所示,主要包括基座、動(dòng)平臺(tái)、復(fù)合支撐以及球形鉸鏈,可以衰減空間六個(gè)自由度的振動(dòng),其中每條復(fù)合支撐均由主動(dòng)作動(dòng)器和被動(dòng)隔振器組成,主動(dòng)作動(dòng)器作為振動(dòng)控制的執(zhí)行元件,具有較好的低頻減振效果,可以控制諧振峰處的振動(dòng),被動(dòng)隔振器提供被動(dòng)隔振,在高頻段振動(dòng)抑制效果較好,兩者結(jié)合實(shí)現(xiàn)主被動(dòng)混合隔振,具有較寬的隔振頻段,每條復(fù)合支撐通過(guò)球鉸與基座和動(dòng)平臺(tái)進(jìn)行連接。
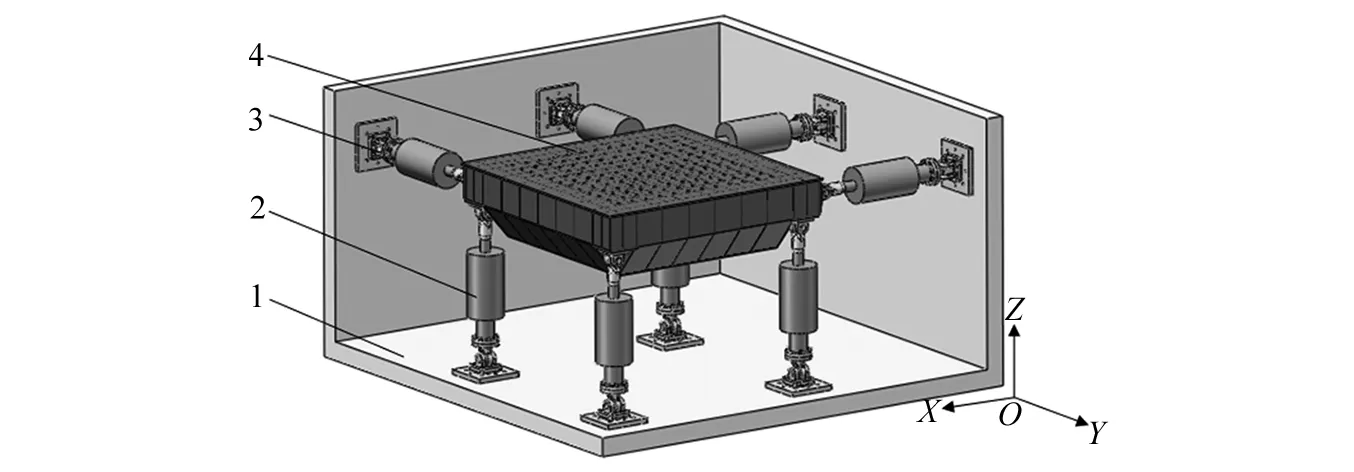
1.基座; 2.主被動(dòng)復(fù)合支撐; 3.球鉸; 4.動(dòng)平臺(tái)。圖1 冗余六自由度并聯(lián)隔振平臺(tái)三維模型Fig.1 Three dimensional model of redundant 6DOF parallel vibration isolation platform
主被動(dòng)復(fù)合支撐結(jié)構(gòu),如圖2所示,復(fù)合支撐主要由液壓作動(dòng)器、金屬螺旋彈簧、橡膠阻尼塊等組成,上邊部分通過(guò)球鉸連接于隔振平臺(tái)的動(dòng)平臺(tái),下邊部分通過(guò)球鉸連接于隔振平臺(tái)的基座,液壓作動(dòng)器僅作為力發(fā)生器提供主動(dòng)力。復(fù)合支撐結(jié)構(gòu)上采用液壓作動(dòng)器與被動(dòng)彈簧阻尼系統(tǒng)并聯(lián)的方式,采用這種設(shè)計(jì)方案的優(yōu)點(diǎn)在于,當(dāng)隔振平臺(tái)的液壓作動(dòng)器失效時(shí),即液壓作動(dòng)器的主動(dòng)力零時(shí),被動(dòng)隔振器仍然能夠通過(guò)阻尼控制正常工作,此時(shí)支撐采用彈簧-阻尼器的形式來(lái)吸收耗散由于基座振動(dòng)產(chǎn)生的能量,從而達(dá)到振動(dòng)隔離的目的,大大提高了隔振平臺(tái)的可靠性和穩(wěn)定性。
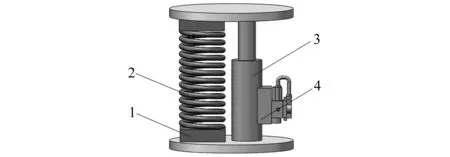
1.橡膠塊; 2.金屬?gòu)椈桑?3.液壓作動(dòng)器; 4.伺服閥塊。圖2 復(fù)合支撐結(jié)構(gòu)圖Fig.2 Composite support structure diagram
2 主被動(dòng)混合隔振數(shù)學(xué)模型
采用Newton-Euler法建立了并聯(lián)隔振平臺(tái)主被動(dòng)混合隔振數(shù)學(xué)模型[12-13],數(shù)學(xué)模型可由式(1)表示
(1)

液壓作動(dòng)器輸出的主動(dòng)力方程可表示為
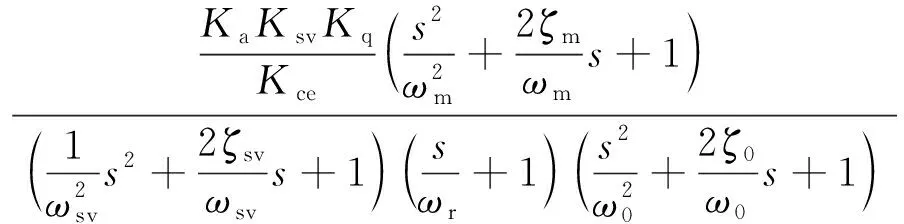
(2)
式中:Ap為活塞有效面積,m2;PL為負(fù)載壓力,Pa;Ka為伺服放大器增益,A/V;Ksv為伺服閥的流量增益,m/V;Kq為滑閥流量增益,m2/s;Kce為包括泄露在內(nèi)的總的壓力流量系數(shù),(m3/s)/Pa;s為復(fù)變數(shù);ωsv為伺服閥的固有頻率,rad/s;ζsv為伺服閥的阻尼比,通常取0.5~0.7;ωm為液壓固有頻率,rad/s;ζm為液壓阻尼比,通常取0.1~0.2;ωr為轉(zhuǎn)折頻率,rad/s。
3 并聯(lián)隔振平臺(tái)被動(dòng)隔振性能分析
根據(jù)建立的并聯(lián)隔振平臺(tái)主被動(dòng)混合隔振數(shù)學(xué)模型,考慮液壓作動(dòng)器失效的情況,即主動(dòng)力為零時(shí),可以得到并聯(lián)隔振平臺(tái)被動(dòng)隔振數(shù)學(xué)模型表達(dá)式如式(3)所示。
(3)
利用MATLAB/Simulink軟件搭建并聯(lián)隔振平臺(tái)被動(dòng)隔振仿真模型,如圖3所示。對(duì)搭建的被動(dòng)隔振模型仿真前,需要輸入仿真參數(shù),而相關(guān)的仿真參數(shù)在隔振平臺(tái)的設(shè)計(jì)階段就已經(jīng)確定,具體仿真參數(shù)如表1所示。
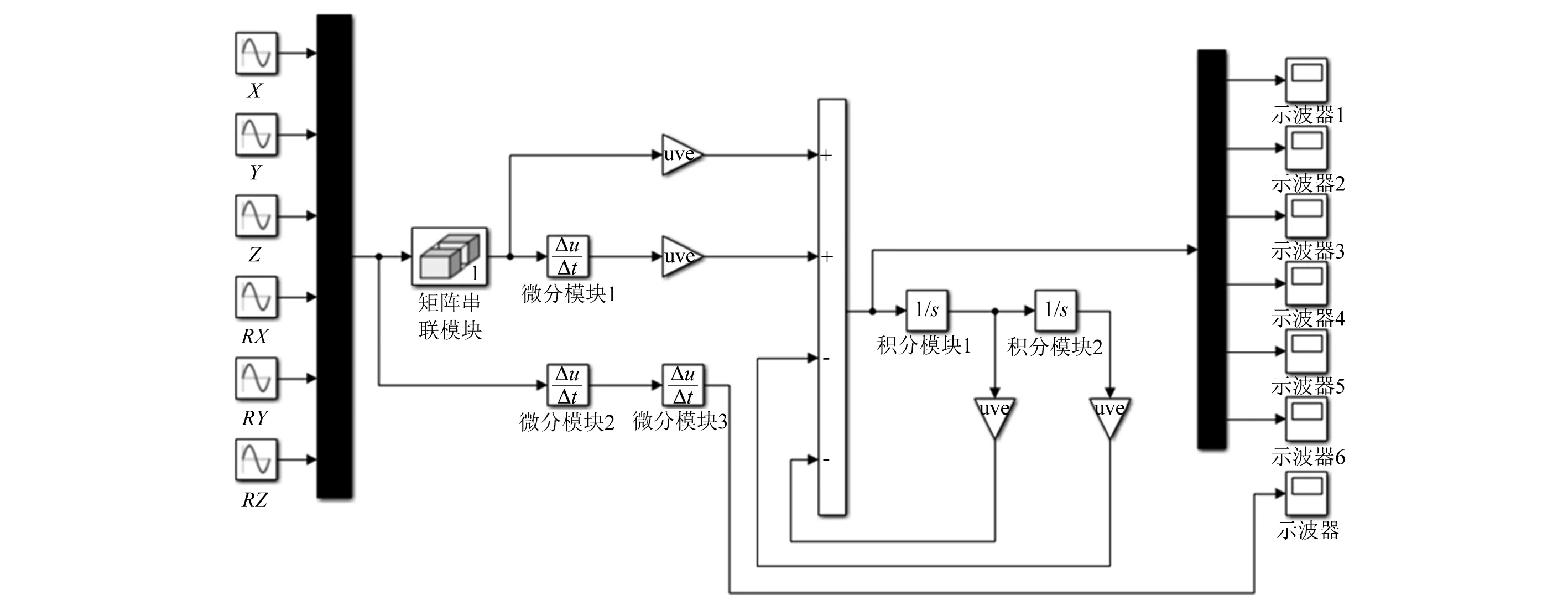
圖3 被動(dòng)隔振仿真模型Fig.3 Simulation model of passive vibration isolation
表1 主要仿真參數(shù)Tab.1 Main simulation parameters
為了研究并聯(lián)隔振平臺(tái)的六維被動(dòng)隔振性能,仿真時(shí)將針對(duì)基座平動(dòng)和轉(zhuǎn)動(dòng)方向分別施加正弦位移擾動(dòng)和正弦角位移擾動(dòng)來(lái)模擬空間環(huán)境振動(dòng),擾動(dòng)信號(hào)的初相位為0,頻率分別為3 Hz,5 Hz,10 Hz,這幾個(gè)頻率既包含了被動(dòng)隔振時(shí)的頻段,又包含了主動(dòng)隔振時(shí)的頻段,不僅可以研究被動(dòng)隔振的性能,同時(shí)對(duì)并聯(lián)隔振平臺(tái)主被動(dòng)混合隔振的研究也具有參考意義。且由于本研究并聯(lián)隔振平臺(tái)關(guān)于X=Y平面對(duì)稱,當(dāng)基座只有Y軸向振動(dòng)干擾時(shí),仿真結(jié)果與只有X軸向振動(dòng)干擾時(shí)相同。因此這里只針對(duì)X,Z平動(dòng)方向和轉(zhuǎn)動(dòng)方向開(kāi)展研究。
(1) 沿X軸向的線擾動(dòng)。
沿X軸向?qū)Σ⒙?lián)隔振平臺(tái)的基座分別施加幅值為0.001 m,頻率為3 Hz,5 Hz,10 Hz的直線擾動(dòng),負(fù)載加速度響應(yīng)隨時(shí)間的變化曲線,如圖4所示。
由圖4可知,當(dāng)干擾頻率分別為3 Hz,5 Hz和10 Hz時(shí),對(duì)應(yīng)的負(fù)載加速度響應(yīng)分別為0.05 m/s2,0.07 m/s2和0.08 m/s2,通過(guò)計(jì)算可得對(duì)應(yīng)的振動(dòng)傳遞率分別為0.140 7,0.070 9和0.020 3。
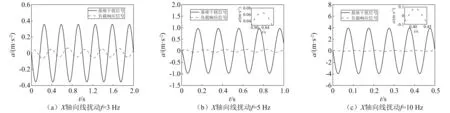
圖4 X軸向線擾動(dòng)時(shí)負(fù)載加速度響應(yīng)Fig.4 Load acceleration response under X-axis line disturbance
(2) 沿Z軸向的線擾動(dòng)。
沿Z軸向?qū)Σ⒙?lián)隔振平臺(tái)的基座分別施加幅值為0.001 m,頻率為3 Hz,5 Hz,10 Hz的直線擾動(dòng),負(fù)載加速度響應(yīng)隨時(shí)間的變化曲線,如圖5所示。
由圖5可知,當(dāng)干擾頻率分別為3 Hz,5 Hz和10 Hz時(shí),對(duì)應(yīng)的負(fù)載加速度響應(yīng)分別為0.14 m/s2,0.16 m/s2和0.17 m/s2,通過(guò)計(jì)算可得對(duì)應(yīng)的振動(dòng)傳遞率分別為0.394 0,0.162 1和0.043 1。
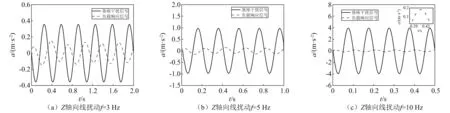
圖5 Z軸向線擾動(dòng)時(shí)負(fù)載加速度響應(yīng)Fig.5 Load acceleration response under Z-axis line disturbance
(3) 繞X軸向的角擾動(dòng)。
繞X軸向?qū)Σ⒙?lián)隔振平臺(tái)的基座分別施加幅值為0.001 rad,頻率為3 Hz,5 Hz,10 Hz的角擾動(dòng),負(fù)載角加速度響應(yīng)隨時(shí)間的變化曲線,如圖6所示。
由圖6可知,當(dāng)干擾頻率分別為3 Hz,5 Hz和10 Hz時(shí),對(duì)應(yīng)的負(fù)載加速度響應(yīng)分別為0.36 rad/s2,0.32 rad/s2和0.37 rad/s2,通過(guò)計(jì)算可得對(duì)應(yīng)的振動(dòng)傳遞率分別為H>1、0.324 2和0.093 7。
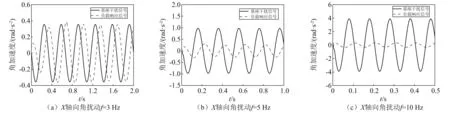
圖6 X軸向角擾動(dòng)時(shí)負(fù)載角加速度響應(yīng)Fig.6 Load angular acceleration response under X-axis angular disturbance
(4) 繞Z軸向的角擾動(dòng)。
繞Z軸向?qū)Σ⒙?lián)隔振平臺(tái)的基座分別施加幅值為0.001 rad,頻率為3 Hz,5 Hz,10 Hz的角擾動(dòng),負(fù)載角加速度響應(yīng)隨時(shí)間的變化曲線,如圖7所示。
由圖7可知,當(dāng)干擾頻率分別為3 Hz,5 Hz和10 Hz時(shí),對(duì)應(yīng)的負(fù)載加速度響應(yīng)分別為0.38 rad/s2,0.36 rad/s2和0.39 rad/s2,通過(guò)計(jì)算可得對(duì)應(yīng)的振動(dòng)傳遞率分別為H>1、0.364 7和0.098 8。

圖7 Z軸向角擾動(dòng)時(shí)負(fù)載角加速度響應(yīng)Fig.7 Load angular acceleration response during Z-axis angular disturbance
由表2可知,振動(dòng)干擾頻率越高,振動(dòng)傳遞率越小,被動(dòng)隔振性能越好;當(dāng)干擾頻率為相對(duì)高頻10 Hz時(shí),在平動(dòng)和轉(zhuǎn)動(dòng)方向上的振動(dòng)傳遞率均小于0.1,說(shuō)明能夠衰減90%以上的基座振動(dòng),干擾頻率大于10 Hz時(shí),隔振效果會(huì)進(jìn)一步提升;當(dāng)干擾頻率為相對(duì)低頻3 Hz時(shí),振動(dòng)傳遞率較大,振動(dòng)衰減較小,尤其在轉(zhuǎn)動(dòng)方向更為明顯,不僅沒(méi)有隔振效果反而將基座振動(dòng)干擾放大,這主要是由于繞Z軸轉(zhuǎn)動(dòng)方向的干擾頻率為2~3 Hz左右時(shí),達(dá)到了并聯(lián)隔振平臺(tái)的固有頻率。另外干擾頻率相同時(shí),轉(zhuǎn)動(dòng)方向上的振動(dòng)傳遞率明顯高于平動(dòng)方向上的振動(dòng)傳遞率,即轉(zhuǎn)動(dòng)方向上的隔振性能明顯低于平動(dòng)方向,所以主被動(dòng)混合控制時(shí)主要針對(duì)轉(zhuǎn)動(dòng)方向進(jìn)行隔振。
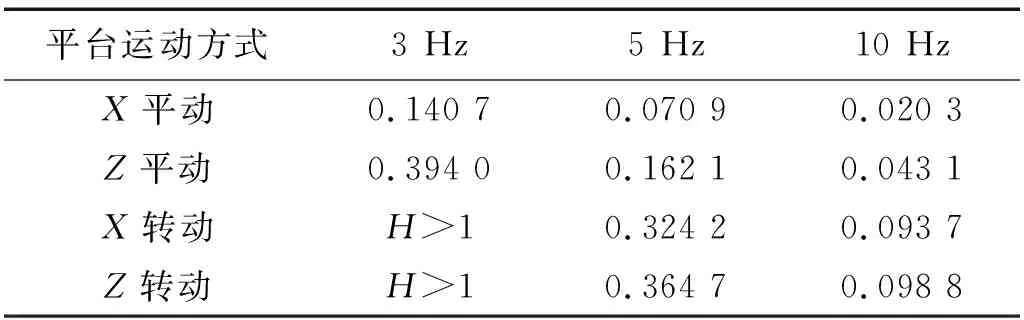
表2 并聯(lián)隔振平臺(tái)被動(dòng)隔振傳遞率Tab.2 Passive transmission rate of parallel vibration isolation platform
4 并聯(lián)隔振平臺(tái)主被動(dòng)混合隔振性能分析
在對(duì)振動(dòng)激勵(lì)進(jìn)行主被動(dòng)混合控制的過(guò)程中,控制算法的設(shè)計(jì)是其中最重要的環(huán)節(jié)之一,控制算法的優(yōu)劣在很大程度上決定了性能的好壞。在工業(yè)控制領(lǐng)域,PID控制器[14-15]因結(jié)構(gòu)簡(jiǎn)單,使用方便而被廣泛使用。然而PID控制屬于線性控制,其只在工作點(diǎn)附近具有良好的控制性能,偏離工作點(diǎn)較遠(yuǎn)時(shí),由于控制對(duì)象的非線性,將難以保證其控制性能。模糊控制在偏離工作點(diǎn)較遠(yuǎn)的區(qū)域可明顯改善控制性能,并且對(duì)控制對(duì)象特性的變化比PID線性控制器具有更強(qiáng)的魯棒性。因此將基于模糊PID復(fù)合控制算法[16-18]對(duì)并聯(lián)隔振平臺(tái)主被動(dòng)混合隔振性能進(jìn)行分析,其中模糊控制規(guī)則如表3所示,所搭建的主被動(dòng)混合隔振仿真模型,如圖8所示,以絕對(duì)速度作為隔振平臺(tái)的反饋信號(hào)能夠降低系統(tǒng)的固有頻率,提高主動(dòng)隔振的性能,因此選取隔振平臺(tái)8個(gè)頂端球鉸處沿復(fù)合支撐作用力方向上的的絕對(duì)速度作為反饋信號(hào)。其中:子系統(tǒng)1~8表示模糊PID復(fù)合控制仿真模型,如圖9所示,其特點(diǎn)是在大偏差范圍內(nèi)利用模糊控制算法調(diào)整系統(tǒng)的控制量,而在小偏差范圍內(nèi)轉(zhuǎn)換成PID控制算法實(shí)現(xiàn)振動(dòng)控制的目的;子系統(tǒng)9~16表示液壓作動(dòng)器主動(dòng)力模型,如圖10所示,在隔振過(guò)程中提供與負(fù)載運(yùn)動(dòng)方向相反的主動(dòng)力,從而減小振動(dòng)的幅值。
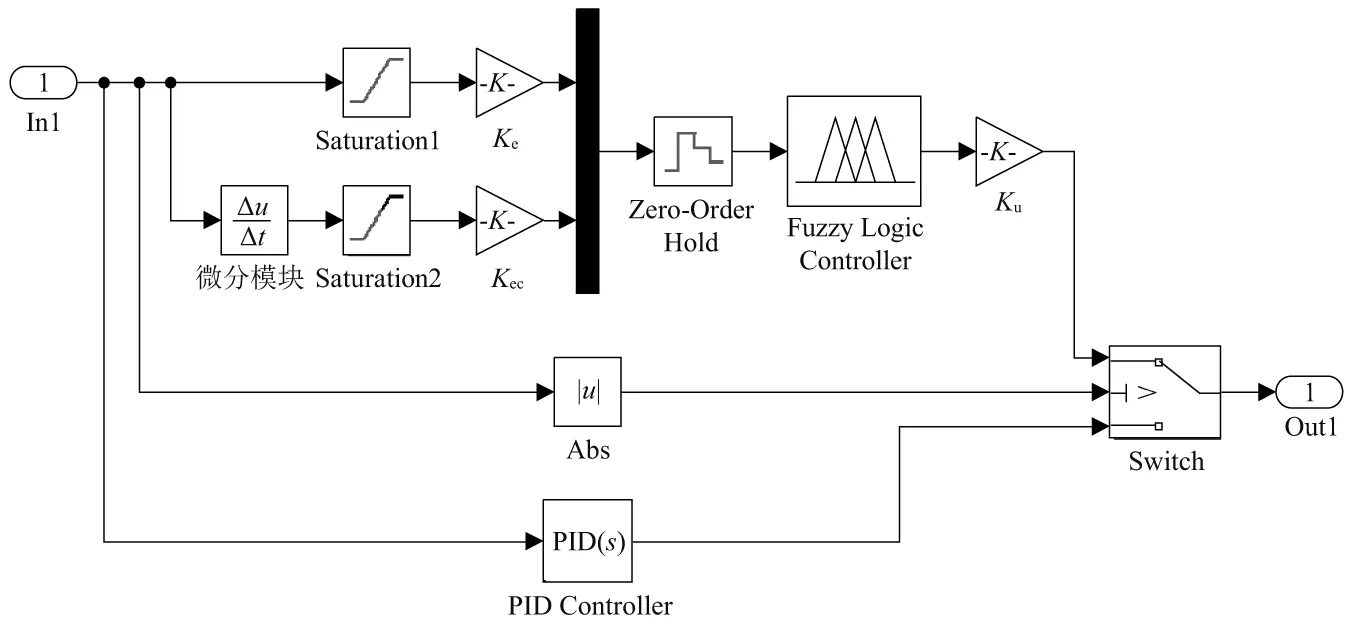
圖9 模糊PID控制器仿真模型Fig.9 Simulation model of fuzzy PID controller

圖10 液壓作動(dòng)器仿真模型Fig.10 Hydraulic actuator simulation model
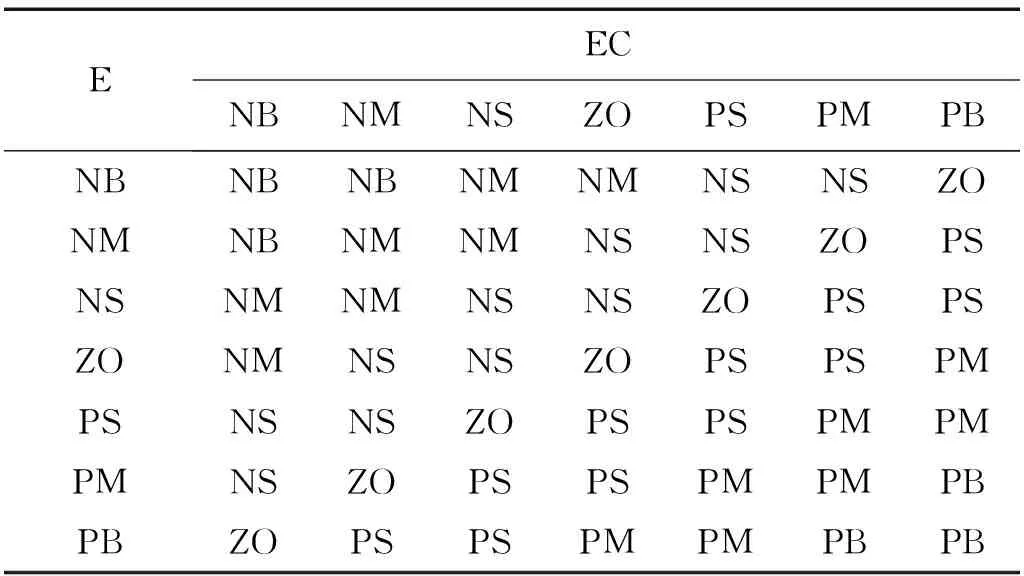
表3 模糊控制規(guī)則Tab.3 Fuzzy control rule
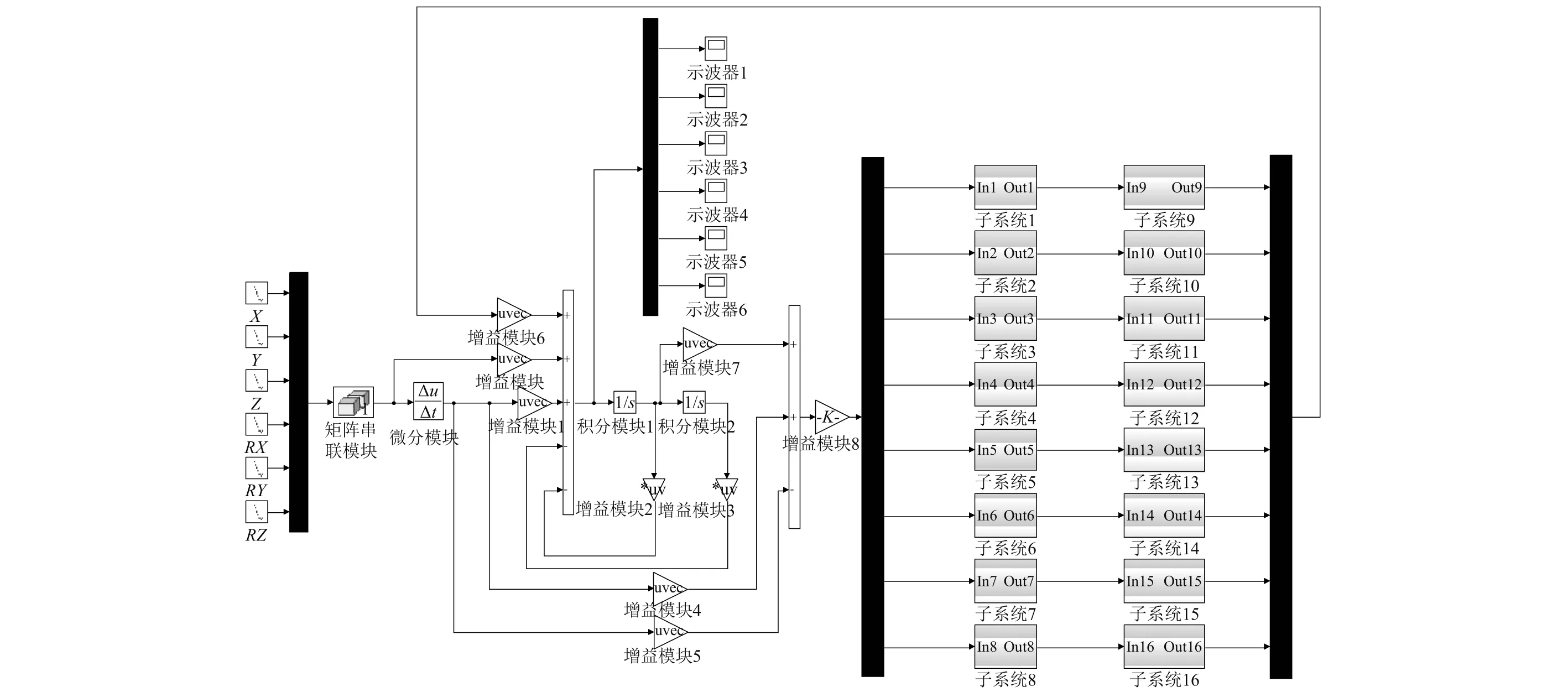
圖8 主被動(dòng)混合隔振仿真模型Fig.8 Simulation model of active and passive hybrid vibration isolation
其中模糊控制器中的量化因子和比例因子由量化檔數(shù)和模糊論域確定[19],取Ke=30,Kec=15,Ku=0.17;PID控制器中的參數(shù)整定采用試湊法,取Kp=0.8,Ki=Kd=0;復(fù)合控制器根據(jù)給定的偏差范圍自動(dòng)實(shí)現(xiàn)兩種算法的轉(zhuǎn)換,該值為設(shè)為0.2。
對(duì)搭建的主被動(dòng)混合隔振仿真模型進(jìn)行仿真前,需設(shè)置仿真參數(shù),具體的仿真參數(shù)如表4所示。
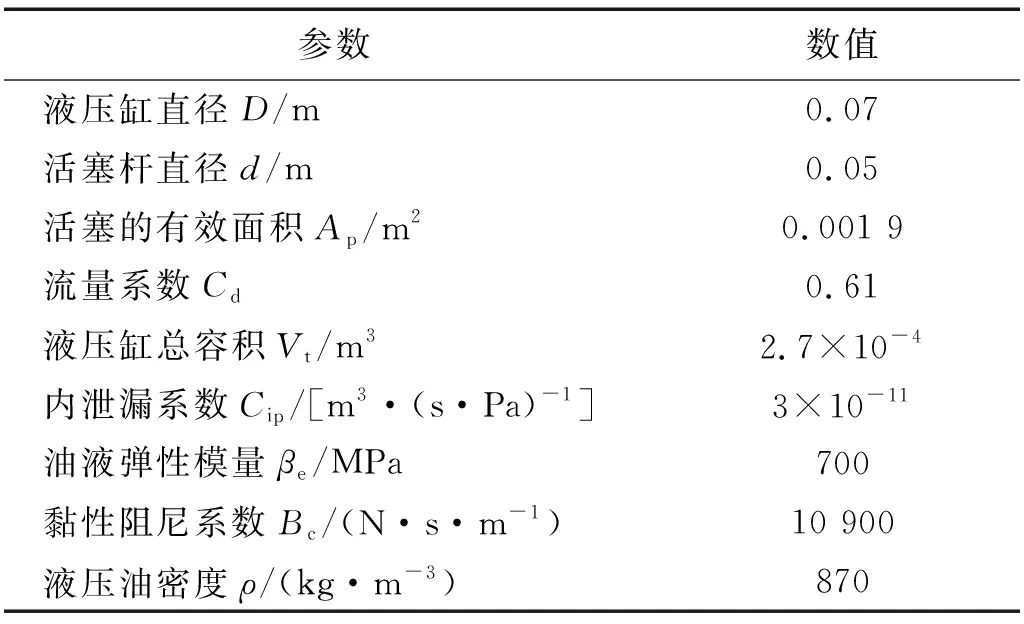
表4 仿真的基本參數(shù)Tab.4 Basic parameters of simulation
由被動(dòng)隔振性能分析可知,轉(zhuǎn)動(dòng)方向的隔振性能明顯低于平動(dòng)方向的隔振性能,因此這里主要針對(duì)轉(zhuǎn)動(dòng)方向的主被動(dòng)混合隔振性能進(jìn)行分析。
(1) 繞X軸方向的角擾動(dòng)。
繞X軸向?qū)Ω粽衿脚_(tái)的基座分別施加幅值為0.001 rad,頻率為3 Hz,5 Hz,10 Hz的角擾動(dòng),負(fù)載角加速度響應(yīng)隨時(shí)間的變化曲線分別,如圖11所示。
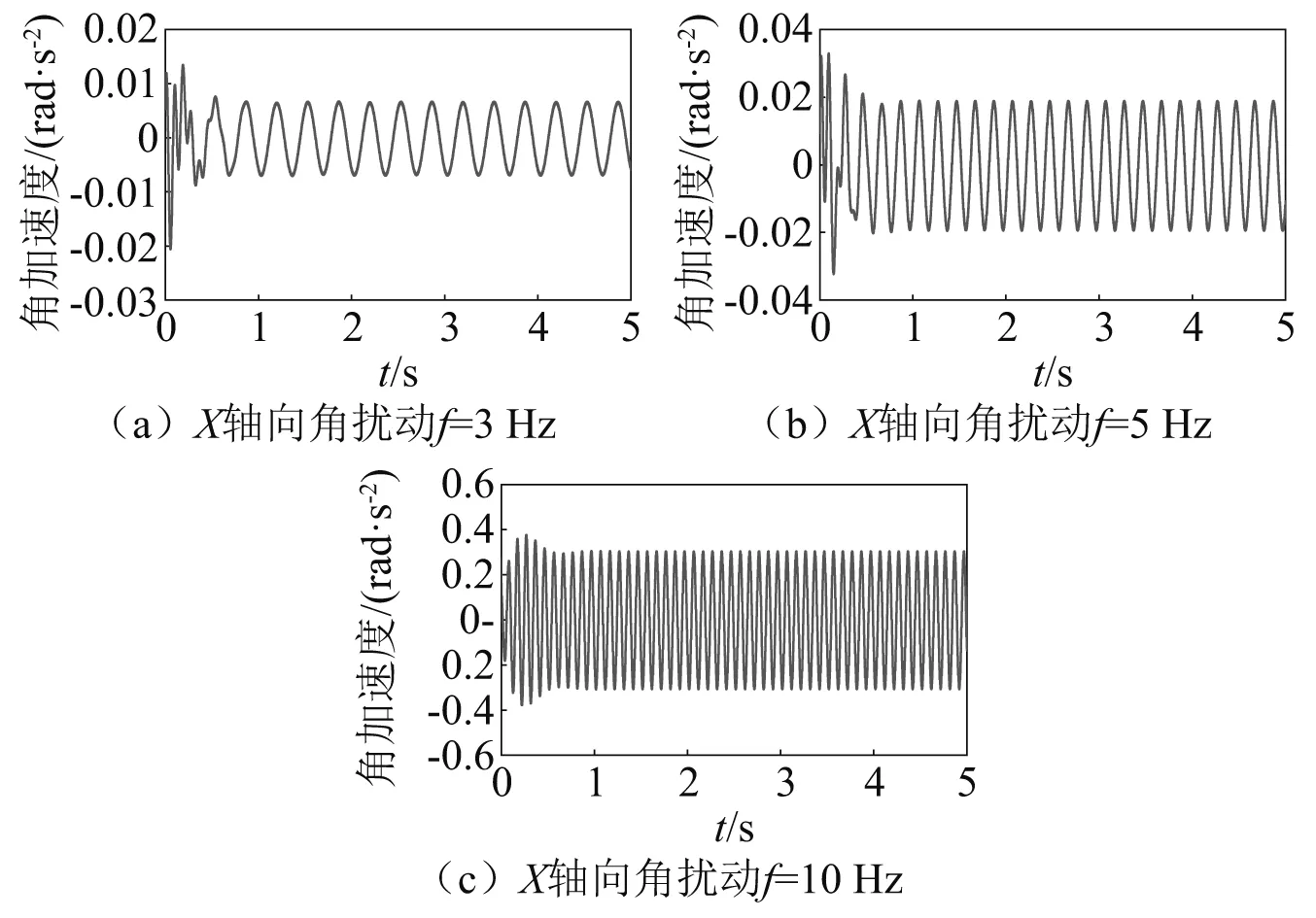
圖11 X軸向角擾動(dòng)時(shí)負(fù)載角加速度響應(yīng)Fig.11 Load angular acceleration response under X-axis angular disturbance
由圖11可知,當(dāng)干擾頻率分別為3 Hz,5 Hz和10 Hz時(shí),對(duì)應(yīng)的負(fù)載加速度響應(yīng)分別為0.006 rad/s2,0.019 rad/s2和0.3 rad/s2,通過(guò)計(jì)算可得對(duì)應(yīng)的振動(dòng)傳遞率分別為0.016 9,0.019 3,0.076 0。
(2) 繞Z軸方向的角擾動(dòng)。
繞Z軸向?qū)Ω粽衿脚_(tái)的基座分別施加幅值為0.001 rad,頻率為3Hz、5 Hz,10 Hz,15 Hz的角擾動(dòng),負(fù)載角加速度響應(yīng)隨時(shí)間的變化曲線,如圖12所示。
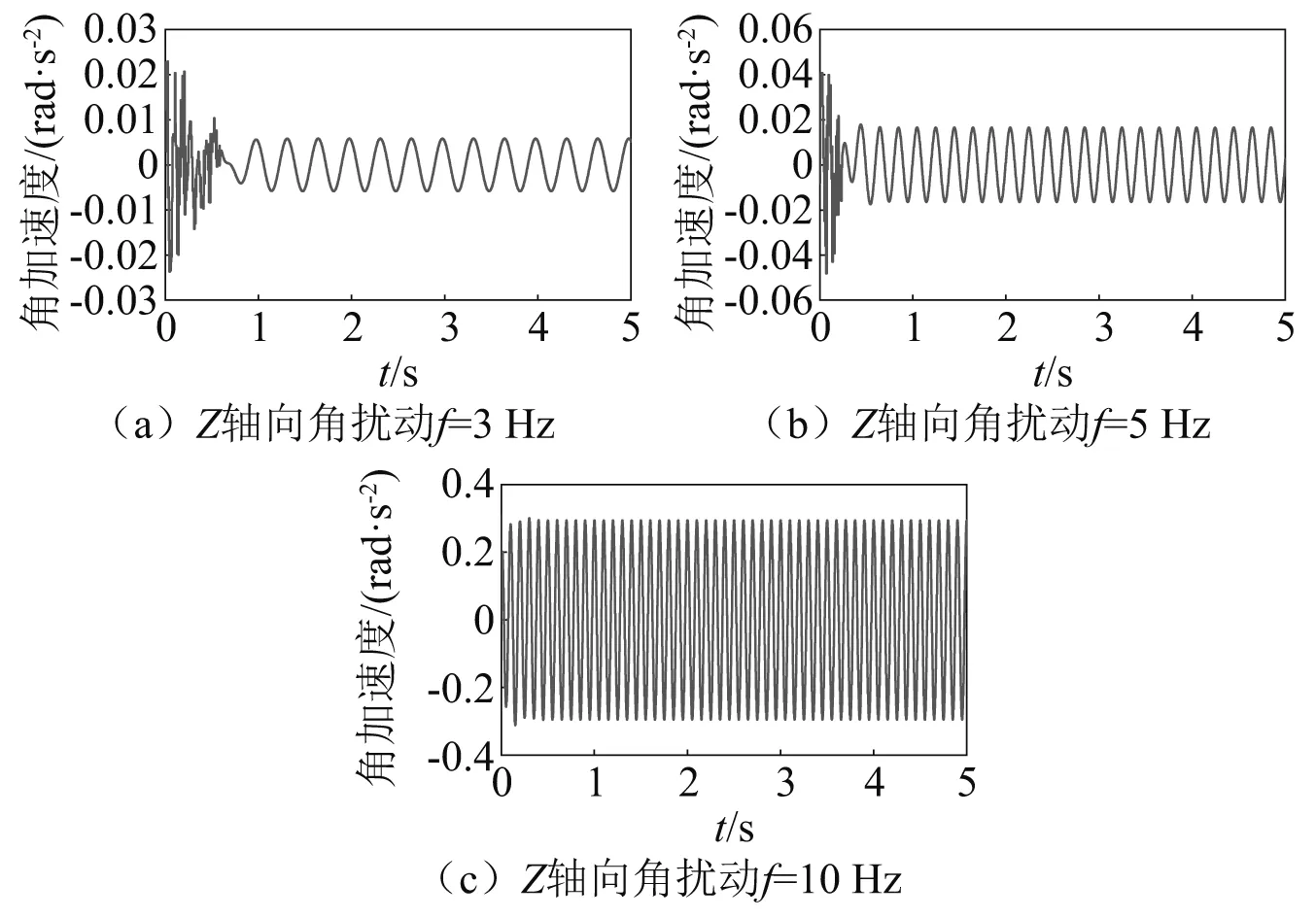
圖12 Z軸向角擾動(dòng)時(shí)負(fù)載角加速度響應(yīng)Fig.12 Load angular acceleration response during Z-axis angular disturbance
由圖12可知,當(dāng)干擾頻率分別為3 Hz,5 Hz和10 Hz時(shí),對(duì)應(yīng)的負(fù)載加速度響應(yīng)分別為0.006 rad/s2,0.017 rad/s2和0.28 rad/s2,通過(guò)計(jì)算可得對(duì)應(yīng)的振動(dòng)傳遞率分別為0.016 9,0.017 2,0.070 9。
表5和表6給出了基座受到繞X和Z軸向角振動(dòng)干擾時(shí),并聯(lián)隔振平臺(tái)在純被動(dòng)隔振和主被動(dòng)混合隔振情況下的振動(dòng)傳遞率情況,其他方向的隔振情況與這兩種情況研究過(guò)程相同。通過(guò)分析仿真結(jié)果可以得到:采用模糊PID控制的并聯(lián)隔振平臺(tái)主被動(dòng)混合隔振性能明顯優(yōu)于被動(dòng)隔振,當(dāng)干擾頻率為3 Hz,5 Hz,10 Hz時(shí)均可以達(dá)到90%以上的隔振效果,擴(kuò)大了隔振頻率的帶寬,增加主動(dòng)控制后不僅對(duì)相對(duì)低頻區(qū)的振動(dòng)干擾有顯著的抑制效果,而且對(duì)相對(duì)高頻區(qū)仍然保持著很好的隔振效果,與純被動(dòng)隔振相比不會(huì)帶來(lái)負(fù)效果。
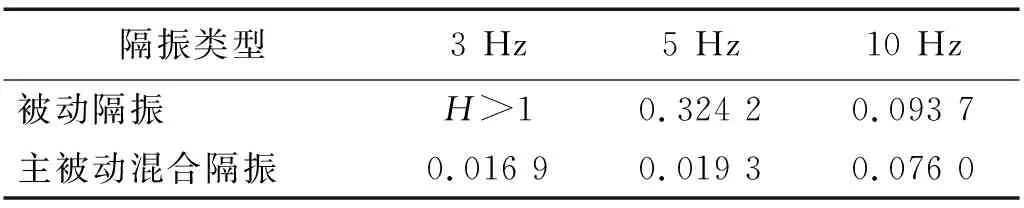
表5 X軸向角擾動(dòng)時(shí)振動(dòng)傳遞率對(duì)比表Tab.5 Comparison of vibration transmission rate under X-axis angular disturbance
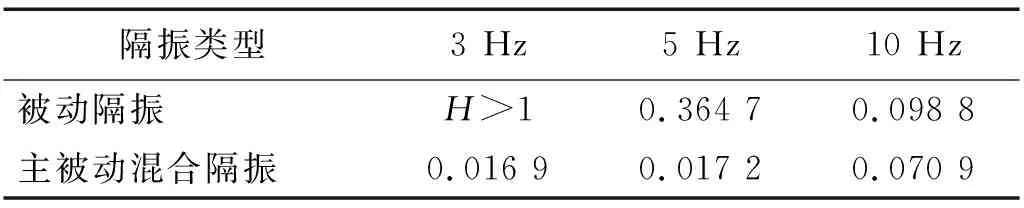
表6 Z軸向角擾動(dòng)時(shí)振動(dòng)傳遞率對(duì)比表Tab.6 Comparison of vibration transmission rate under Z-axis angular disturbance
5 結(jié) 論
(1) 被動(dòng)隔振對(duì)相對(duì)高頻的微振動(dòng)具有良好的衰減性能,而對(duì)相對(duì)低頻的微振動(dòng)的振動(dòng)衰減性能較差,且并聯(lián)隔振平臺(tái)在轉(zhuǎn)動(dòng)方向上的隔振性能明顯低于平動(dòng)方向上的隔振性能。為使并聯(lián)隔振平臺(tái)能夠隔離的帶寬增大就需要減小隔振平臺(tái)的固有頻率,從而降低并聯(lián)隔振平臺(tái)達(dá)到衰減目標(biāo)振幅的最低擾動(dòng)頻率。
(2) 采用基于模糊PID控制的并聯(lián)隔振平臺(tái),其主被動(dòng)混合隔振性能明顯優(yōu)于被動(dòng)隔振,擴(kuò)大了隔振頻率的帶寬。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
大電機(jī)技術(shù)(2022年5期)2022-11-17 08:12:48
天天愛(ài)科學(xué)(2020年6期)2020-09-10 07:22:44
瘋狂英語(yǔ)·新讀寫(xiě)(2020年3期)2020-06-06 09:05:56
數(shù)學(xué)物理學(xué)報(bào)(2018年4期)2018-09-14 03:40:58
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動(dòng)控制(2015年4期)2015-01-01 07:08:44
計(jì)算物理(2014年2期)2014-03-11 17:01:44
鄭州大學(xué)學(xué)報(bào)(理學(xué)版)(2014年3期)2014-03-01 04:21:00