基于電子助力器的冗余防抱死制動算法研究*
2022-02-18 01:44:12劉曉輝于良耀盧正弘
汽車工程 2022年1期
關鍵詞:模型
劉曉輝,于良耀,鄭 晟,盧正弘,宋 健
(清華大學,汽車安全與節能國家重點實驗室,北京 100084)
前言
為適應汽車智能化、電動化與網聯化的要求,汽車制動系統也在向線控化發展,國內外出現了多種不同結構的電子助力器。電子助力器作為智能汽車底盤核心零部件之一,不僅可以滿足智能汽車對自適應巡航(ACC)、自動緊急制動(AEB)、自動泊車和自動無人駕駛等方面的功能要求,還可實現高品質和高冗余的車輛穩定性控制。
制動防抱死系統(ABS)的作用是在車輛制動時,自動控制制動器制動力的大小,使車輪不被抱死,處于邊滾邊滑(滑移率在20%左右)的狀態,以保證車輪與地面的附著力在最大值。隨著智能底盤與電子助力器的應用,當傳統的ABS 系統發生故障時,電子助力器可以控制伺服電機對制動主缸液壓力進行調節,從而控制車輪滑移率,實現制動系統的冗余ABS功能。基于電子助力器實現車輛制動冗余ABS 功能主要須解決兩個問題:制動主缸液壓力的精準控制和快速響應、制動防抱死控制。
于良耀、王治中、Panzani 基于制動總泵液壓力和活塞推桿位移為雙控制變量的閉環反饋,提出比例-積 分-微 分(proportional-integral-derivative,PID)的控制算法。王治中等采用增益式PI 控制算法對系統制動總泵液壓力進行控制。Leiber 等采用模型預測算法對制動總泵液壓力進行控制。余卓平等采用田口方法+分段比例-積分的控制算法對EHB 執行機構主缸制動壓力的控制進行了研究,采用比例-積分-微分、滑模變結構、模型預測等控制算法,對EHB 線控制動系統的主缸活塞位移進行閉環控制,利用液壓系統的PV特性實現了對制動總泵壓力的間接控制。部分學者基于前饋和反饋同時控制其開發的電子伺服制動系統(electric servo braking system,ESB)的制動總泵液壓力。德爾福公司在電機內部加裝傳感器,通過對電機旋轉角度的控制,間接對EHB 系統制動總泵液壓力的控制進行了研究,采用切換控制和串級控制算法,對制動總泵液壓力和制動總泵活塞推桿位移同時進行控制,進而實現對EHB 系統液壓制動力的控制。以上研究在液壓力控制過程中關于輸入頻率、建壓抖動和遲滯等問題方面還有改善空間。
博世公司通過電子助力制動系統(iBooster)和電子穩定性控制系統(ESP)的配合,可以實現主動制動、制動能量回收和冗余ABS 控制等功能。熊璐等基于電子液壓制動系統的線控和解耦特性,以四輪均不抱死為控制目標,實現冗余ABS控制功能。陳志成等基于電控助力制動級聯制動防抱死控制策略,并初步實現了冗余ABS 防抱死功能。Zhao等提出一種基于電子液壓制動系統(EHB)的車輪滑移率控制方法,通過最優控制算法實現四輪制動壓力的分配和控制。孫凱基于線性參數化制動系統模型設計了一種靜態反饋魯棒ABS 控制器,對于道路附著系數和車速的變化具有較好的魯棒性。上述研究大多關注在冗余ABS 功能的實現,并未將車輛制動強度和制動舒適性放在優化目標內。
本文中針對傳統ABS 功能失效的情況(電機失效、開關閥無法關閉),基于自主設計的半解耦式電子助力器,對冗余ABS控制算法展開研究。首先,對eBooster進行精準液壓力控制研究,實現制動主缸液壓力的精準控制和快速調整;然后,建立eBooster、冗余ABS、輪胎和整車等數學模型;最后,在試驗車(哈弗H6)上完成冗余ABS控制算法的驗證。
1 整車模型
在車輛穩定性控制中,根據車輛的動力學模型來計算合理的反饋控制增益是提升車輛動力學穩定性的必要步驟。綜合考慮模型解算的復雜性和計算精度,選用四輪車輛模型,該模型忽略了車輛的俯仰和側傾運動。相比于兩輪“Bicycle”模型,使用四輪車輛模型可以通過垂向載荷的變化來計算每個車輪的速度及滑移率,并得到各個車輪的方向及側偏角,而這些參數都與輪胎特性有關,且便于本文所選用的Dugoff 輪胎模型的計算,可以提升車輛動力學模型的準確性。
1.1 車輛動力學模型
整車模型如圖1 所示,其中F表示各個車輪的縱向力,F表示各個車輪的側向力,表示前軸中心與質心間的縱向距離,表示后軸中心與質心間的縱向距離,表示前后軸軸距,表示單側車輪與質心間的橫向距離,v表示車輛坐標系下的縱向速度,v表示車輛坐標系下的橫向速度,α表示各個車輪的側偏角,表示車輛的質心側偏角,表示整車質量。
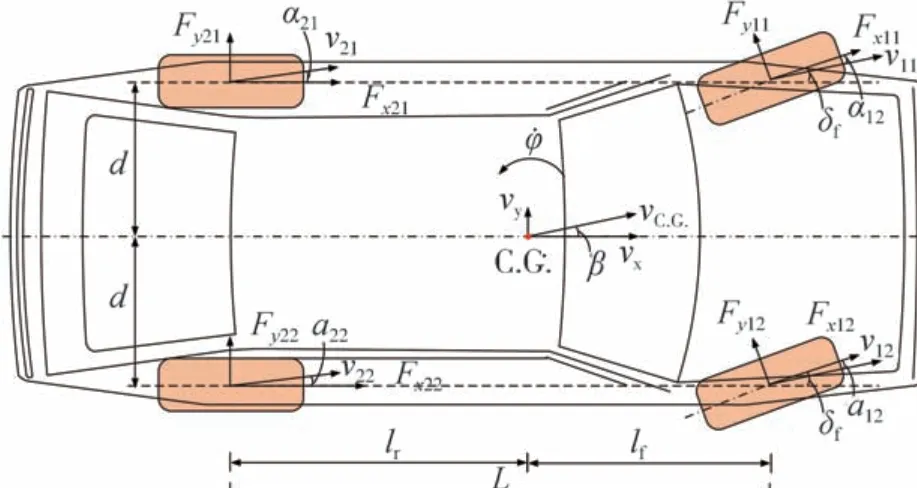
圖1 車輛動力學模型
車輛的縱向、橫向以及橫擺動力學方程為
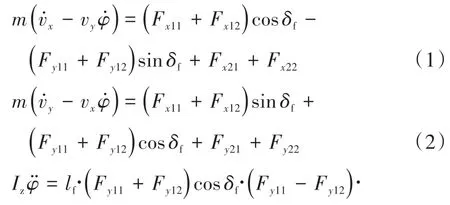
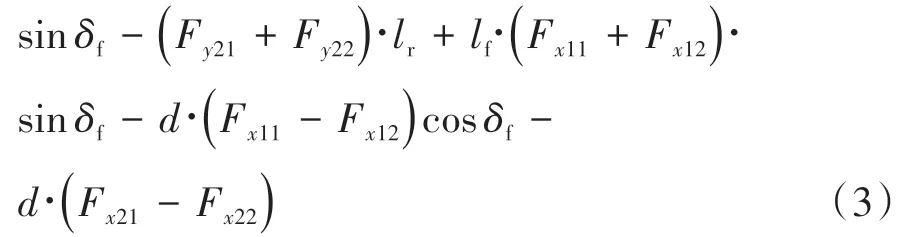
車輛基于大地坐標系的橫向/縱向速度及運動學方程如下:
式中:v表示大地坐標系下車輛的縱向速度;v表示大地坐標系下車輛的橫向速度;(X,Y)表示大地坐標系下車輛的實際位置。雖然在模型搭建過程中忽略了側傾和俯仰運動,但考慮到車輛載荷轉移對輪胎的動力學特性影響較大,仍然需要對4 個車輪的受力情況進行分析,可以得到如下4 個車輪的載荷變化:

式中:F表示各個車輪的垂向載荷;a表示車輛在車身坐標系下的縱向加速度;a表示車輛在車身坐標系下的側向加速度。在本文所進行的動力學穩定性控制策略研究過程中采用了前驅車輛作為研究對象,因此可以得到如下4個車輪的動力學方程:
式中:ω表示各個車輪的轉速;表示車輪半徑;表示車輪轉動慣量;p表示各個車輪的輪缸壓力;表示由輪缸壓力轉換為制動力矩時的壓力力矩系數;表示根據發動機輸出的轉矩經傳動系統轉化得到的兩個驅動輪的驅動力矩。
1.2 輪胎模型
在當前有多種輪胎模型可以用于車輛的動力學穩定性控制,例如線性輪胎模型、Magic Formula輪胎模型、統一半經驗輪胎模型和Dugoff輪胎模型等。由于本文研究目的之一是拓展車輛的動力學穩定性控制范圍,一旦輪胎側向力達到飽和,車輛的側向動力學穩定性將具備明顯的非線性特征,此時就難以使用簡單的線性輪胎模型。相比于其他輪胎模型,Dugoff輪胎模型在考慮了輪胎橫向/縱向動力學特性的同時,由于其公式簡潔使計算量較小,相關變量便于通過傳感器獲得,且對輪胎參數依賴度低,極大地便利了工程應用。因此采用Dugoff輪胎模型來進行輪胎力的估算,其縱向/橫向輪胎力可通過如下公式獲得:

式中:R表示車輪半徑;σ表示輪胎滑移率,下標=1,2 分別表示前后輪胎,下標=1,2 分別表示左輪胎和右輪胎。4個車輪的側偏角計算公式為
式中:為輪胎轉角;為輪胎側偏角;為車輛橫擺角。
在車輪載荷不變的情況下,通過Matlab 仿真測試了輪胎在組合滑移條件下的側向力特性。此外,還探討了兩種不同的路面摩擦因數對輪胎側向力特性的影響,道路摩擦因數分別為0.2 和0.8。圖2 為Dugoff 輪胎模型縱向/側向力與滑移率/側偏角之間的關系。結果表明,滑移率不同時,輪胎縱向/側向力的特性有很大的不同。如果輪胎的側向滑移角和滑移率出現變化,也會使輪胎的縱向/側向力產生較大的變化,因此在研究輪胎側向力的過程中應考慮輪胎的聯合滑移。
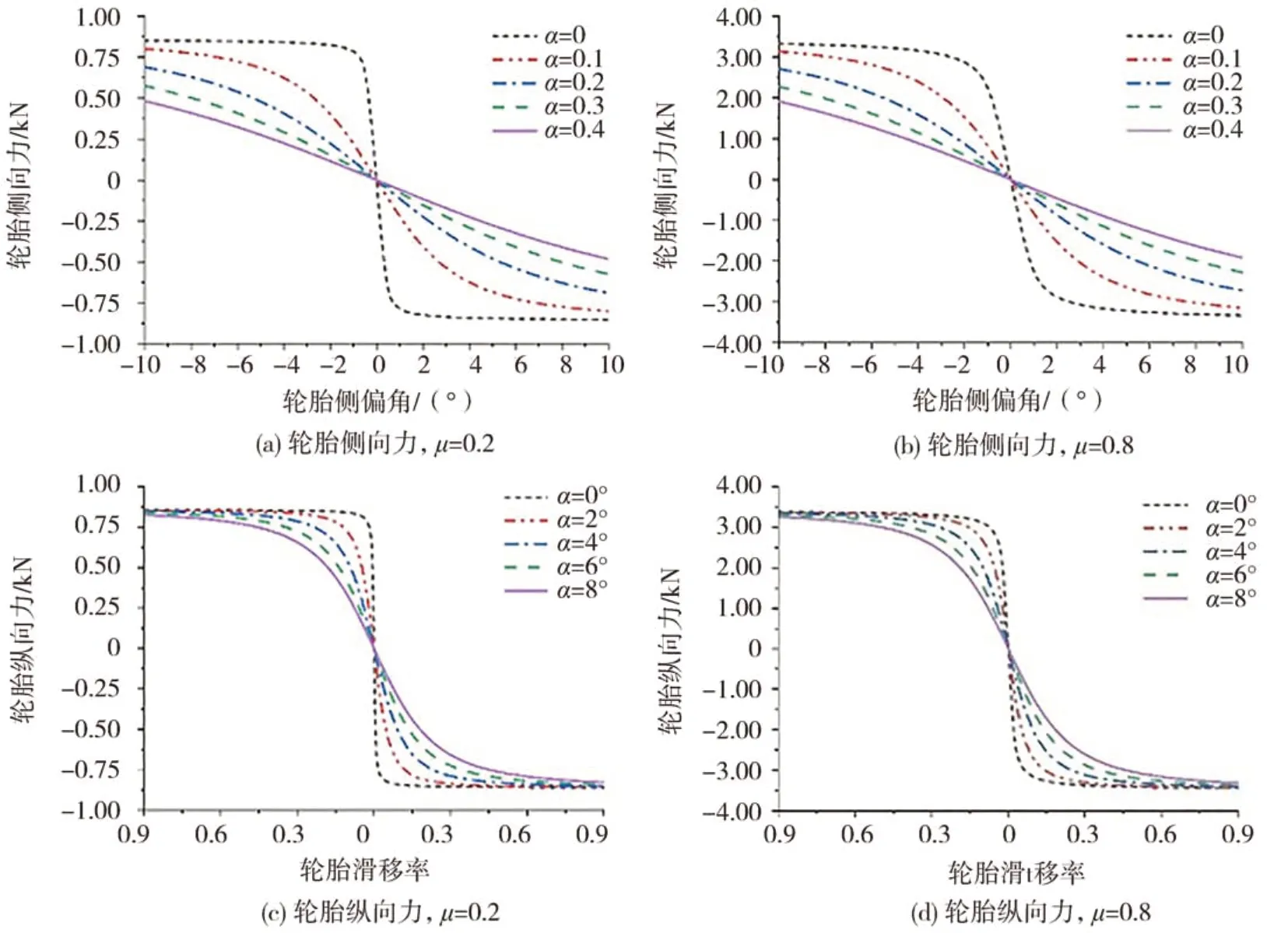
圖2 輪胎縱向/側向力與滑移率/側偏角之間的關系
2 電子助力制動系統
本文中基于新能源電動車對制動系統配合電驅動系統進行能量回收的功能需求和舒適性提高的性能需求,自主設計和研發了一款半解耦電子助力制動器。該電子助力制動系統由eBooster 驅動電機、減速增轉矩機構、制動主缸、制動輪缸、控制器、制動踏板和制動管路等組成。
2.1 電子助力器工作原理
電子助力器工作原理如圖3 所示,具體描述如下:踏板推桿與制動總泵推桿斷開,兩者之間存在一定的間隙;當駕駛員踩下制動踏板時,踏板推桿向前運動,位移傳感器磁塊跟隨踏板推桿(位移傳感器磁塊通過位移傳感器磁塊支架固定在踏板推桿上)同時向前運動,踏板推桿與制動總泵推桿之間的間隙減小,此時eBooster 控制器檢測到位移傳感器信號后,驅動助力電機旋轉,電機通過電機齒輪、中間齒輪、梯形絲桿螺母齒輪減速增轉矩后將力矩傳遞出去;梯形絲桿螺母齒輪帶動梯形絲桿螺母旋轉,梯形絲桿螺母通過梯形絲桿將轉動力矩轉化為前后平動推力;梯形絲桿推動滑動法蘭盤、滑動法蘭盤推動制動總泵推桿頂住制動主缸活塞壓縮制動液進而產生制動壓力,此時踏板推桿與制動總泵推桿之間的間隙增大,整個助力制動過程中,踏板推桿與制動總泵活塞不會接觸。當出現緊急制動或電機助力失效時,踏板推桿與制動主缸活塞接觸,駕駛員通過踩踏制動踏板,將制動力作用到制動主缸活塞上,建立一定強度的制動壓力,實施制動。
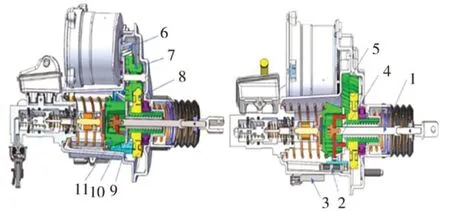
圖3 eBooster工作原理圖
2.2 電機及減速增轉矩機構
eBooster 動力與傳動系統結構表述如圖4 所示。電機是總泵助力式線控制動系統的動力源,電機的轉速和轉矩通過傳動機構進行減速增轉矩,最終推動制動主缸建壓。
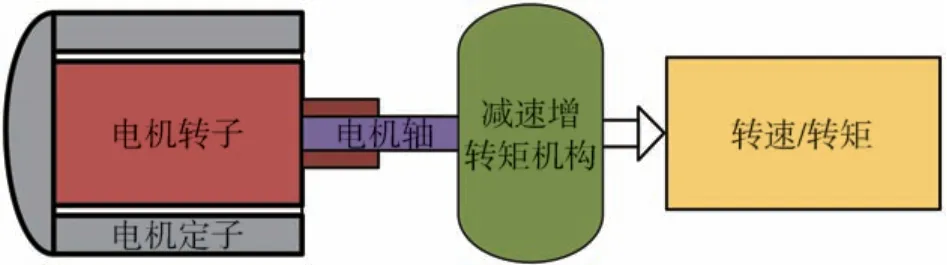
圖4 eBooster電機與減速增轉矩機構
電機的電壓方程為
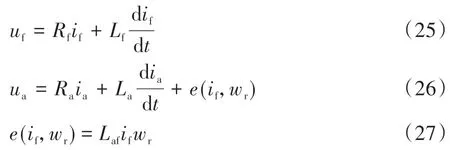
電磁轉矩方程為

轉矩平衡方程為

電壓和電流之間的約束關系為

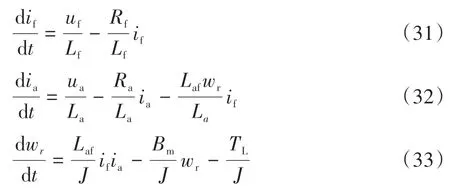
勵磁電流、電樞電流和轉子角速度的狀態方程為
減速增扭機構的作用是減速增轉矩,并將電機的轉動轉化為推動制動總泵活塞的平動。不同的減速比會帶來不同的響應時間和液壓控制效果。

式中:和代表勵磁電壓和電樞電壓;和代表勵磁電流和電樞電流;和代表勵磁電阻和電樞電阻;和代表對應的自感系數;與勵磁電流和轉子轉速有關,代表運動感生電動勢系數;代表電機的輸出轉矩;代表電機負載轉矩;代表減速增轉矩機構的減速比;代表減速增轉矩機構的輸出轉矩;代表電機的輸出轉速;代表減速增轉矩機構的輸出轉速。電機的參數設置參考實際選用的電機參數。
2.3 液壓元件模型
總泵助力式線控制動系統的液壓元件主要由制動總泵、制動輪缸、制動管路組成。
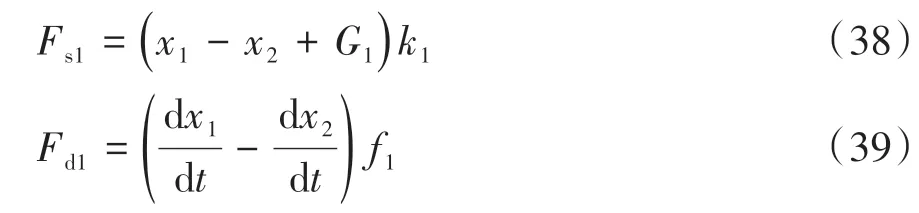
制動總泵結構如圖5 所示。制動總泵選用某乘用車車型使用的中心閥雙腔式制動總泵來建模,該制動總泵是量產標件,可靠性得到保證。制動總泵的前腔活塞在制動力的作用下推動彈簧阻尼元件,克服前后腔活塞之間的間隙。間隙消除后活塞需要克服等效彈簧的阻力繼續向前移動。
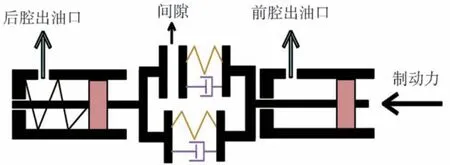
圖5 eBooster工作原理
制動總泵前后腔活塞的運動方程為
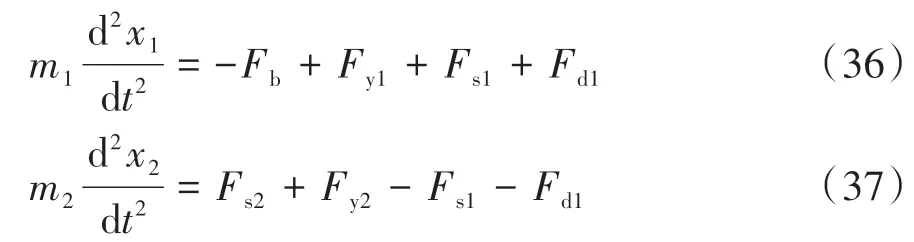
式中:和代表制動總泵前后腔活塞的質量;和代表兩個活塞的位移;和代表兩個活塞上受到的壓力;代表作用在無間隙彈簧上的力;代表作用在制動總泵后腔腔內彈簧上的力;代表阻尼力。
無間隙彈簧受到的力和阻尼力可以按以下方程式計算:
式中:為無間隙彈簧剛度;為阻尼系數;為彈簧預緊力。
制動總泵前后腔制動液流速方程為

式中:和代表制動總泵前后腔制動液流速;和代表制動總泵前后腔的有效面積。
制動輪缸的數學模型和制動總泵模型是相似的,其結構見圖6。
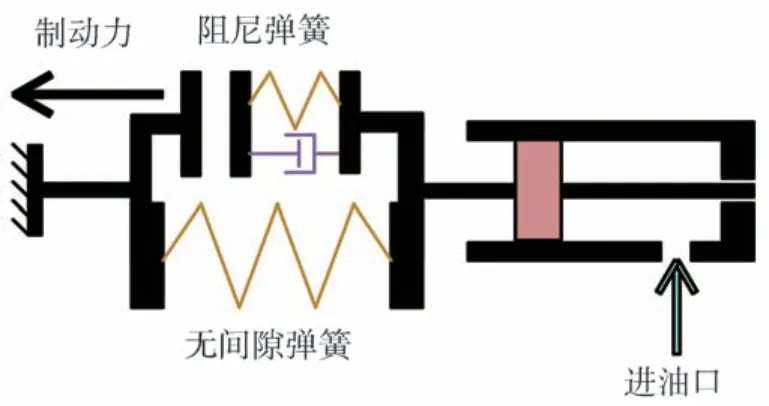
圖6 制動輪缸結構
制動輪缸受力的動態方程為

式中:為制動鉗質量;x為制動鉗位移;F為制動力;為回位彈簧的力;為回位彈簧的剛度;為回位彈簧的預緊力。
制動液壓在通過制動管路時有液壓壓降,尤其是在通過制動軟管時,液壓壓降方程為

式中:為液壓壓降;為阻尼系數;為制動管路的長度;為制動管路直徑;為制動液在管路中的流速。
3 冗余ABS模型
冗余ABS 控制系統架構如圖7 所示。通過對制動、轉向、驅動等系統的信號檢測來進行駕駛員意圖識別,在駕駛員實施制動時,對車輛制動過程中各個狀態變量進行估算和監測,基于建立的冗余ABS 控制策略確定該功能的介入和退出時機。制動主缸的壓力控制采用變增益PID 控制,在冗余ABS 控制算法介入時,基于SMC(滑模控制)算法對車輪的滑移率進行控制,從而實現車輛冗余ABS控制功能,提升穩定性控制。
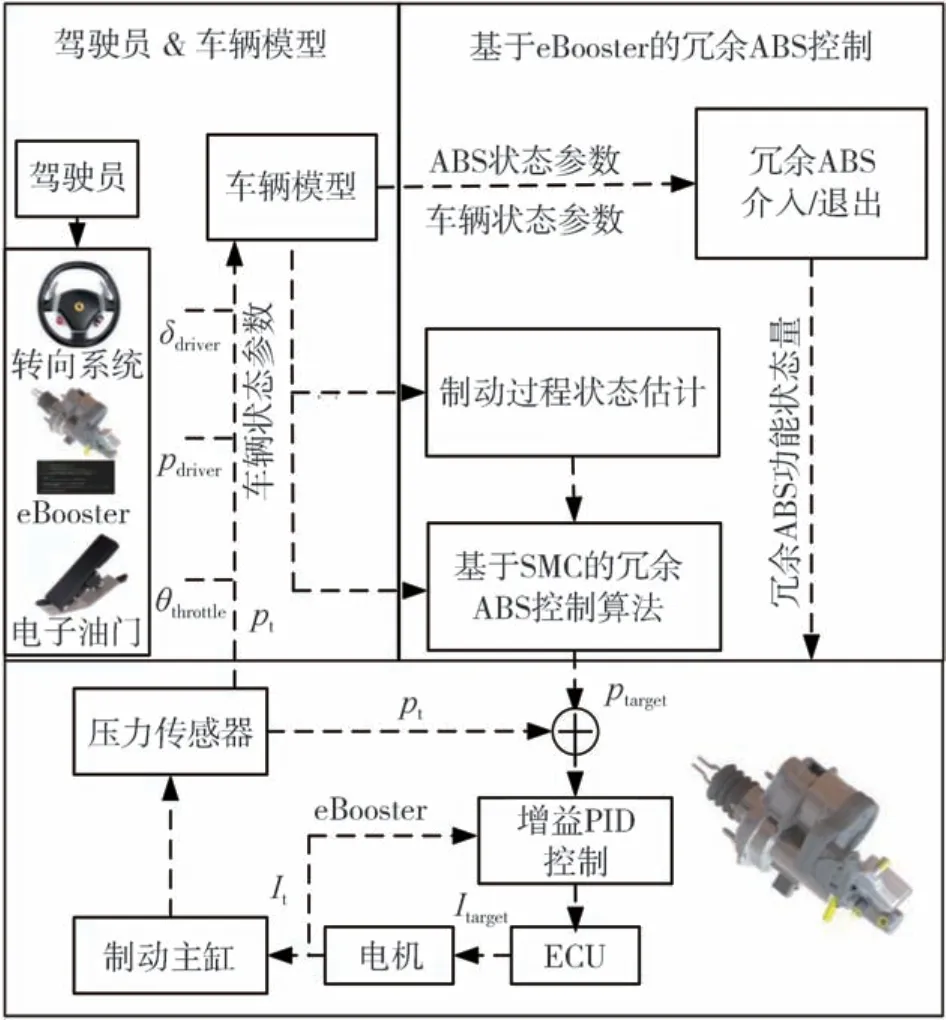
圖7 冗余ABS控制系統架構
3.1 車速、輪速、滑移率計算模型
基于eBooster 的冗余ABS 模型選用邏輯門限控制,系統通過對車速、滑移率等輸入信號的判斷,如果判定滿足下一個邏輯狀態時,就跳轉到下一個控制狀態,否則就返回到上一個控制狀態,使系統在加壓、保壓、建壓3 個狀態變化。在制動過程中盡量將滑移率控制在最佳滑移率附近。典型的輪胎縱向附著系數與滑移率之間的關系曲線見圖8。
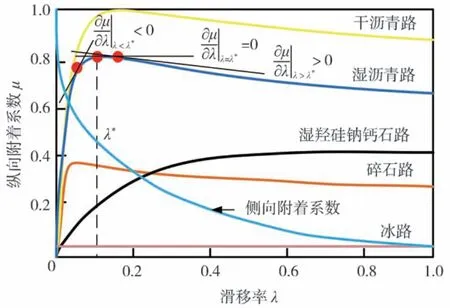
圖8 縱向附著系數與滑移率關系
車輛行駛在不同的路面上,縱向附著系數會隨著滑移率的變化而變化,大多數的-曲線都存在一個最優滑移率,使車輛的縱向附著系數最大,此時車輛可以獲得縱向最大的制動減速度,且可以保證車輪不抱死。
基于單車輪車輛模型的討論,假設車輛的縱向車速、單車輪受到的垂直載荷和輪胎受到的縱向力是可以準確得到的。地面附著系數和滑移率的計算公式為

通常情況下,車輛的側向附著系數會隨著滑移率的增大而減小,為保證車輛的穩定性,滑移率會控制在15%~20%。出于以上考慮,假設各路面下的最優滑移率如表1所示。
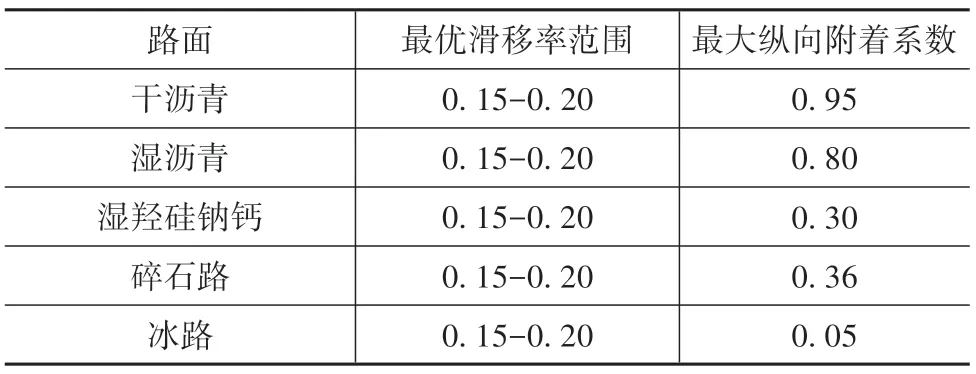
表1 最優滑移率
基于滑模變結構控制算法,對車輛防抱制動總泵壓力控制進行研究。
滑模控制的狀態變量為


滑模控制的切換函數可以用下式表達:

根據連續函數和等速趨近相結合的滑模控制方式,切換函數的導數為

式中:為等速趨近參數;為連續函數tanh 的飽和區間參數。

將液壓系統變換為1階慣性模型:

制動總泵在時刻的壓力控制量為

3.2 主缸壓力控制
主缸壓力的控制方法如圖9和圖10所示。以目標液壓力為調度對象的控制系統,液壓力實際控制效果不僅與系統輸入的最大目標壓力相關,且與目標壓力的控制頻率有關。本文根據駕駛員常規制動、緊急制動、點制動、往復制動等工況進行高低頻劃分。將目標制動壓力和目標壓力的控制頻率作為系統的增益調度模塊。
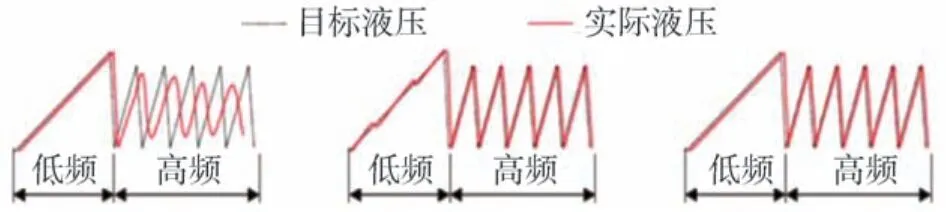
圖9 控制模式增益調度示意圖
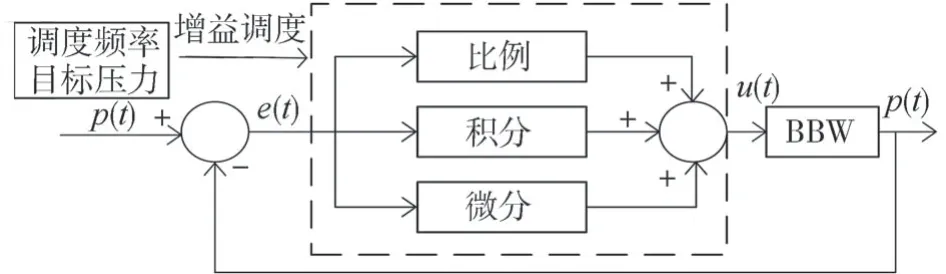
圖10 增益PID控制算法框圖
根據目標壓力的不同,從小到大設計一系列的目標壓力值、、、…、p,對應局部控制參數為(,,)、(,,)、…、(,,)。
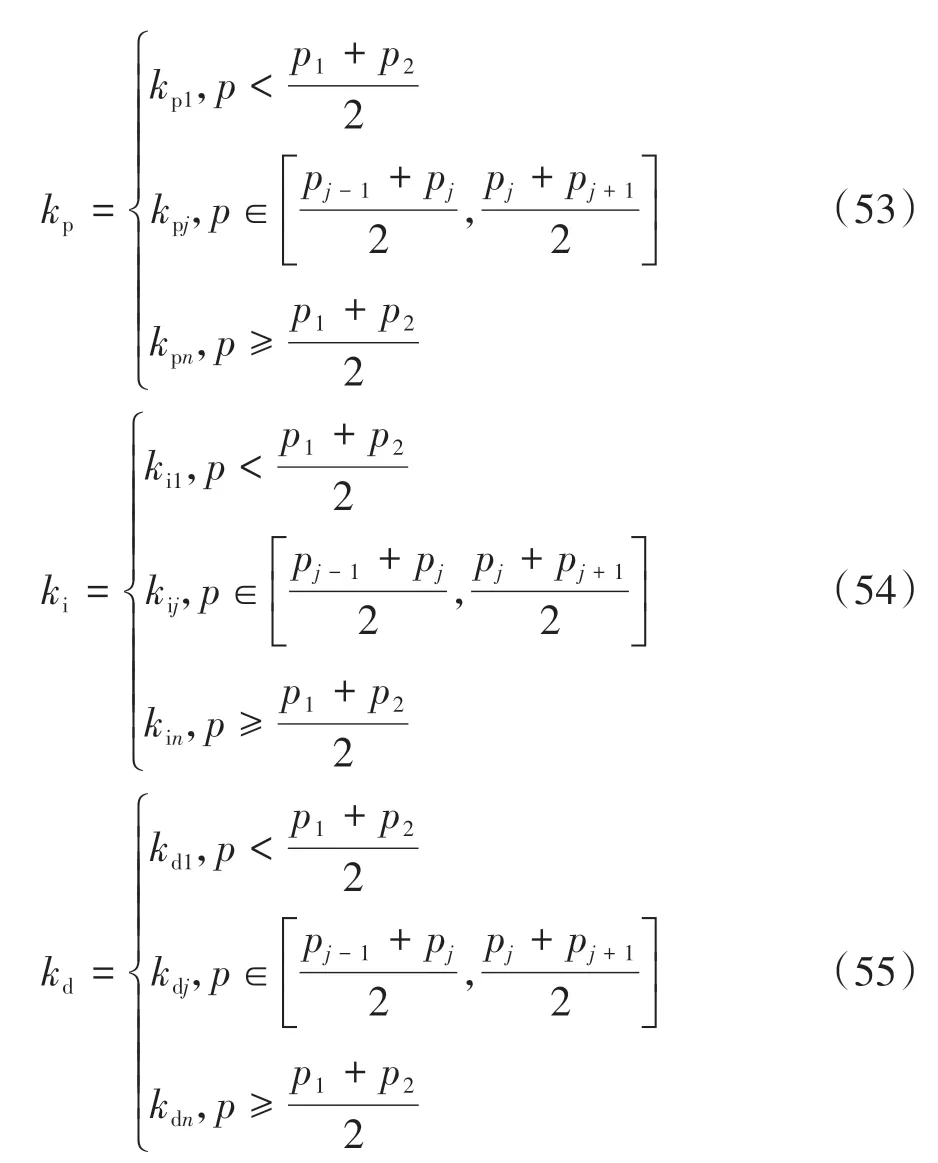
高頻控制和低頻控制也會對系統的壓力控制產生影響,需要將兩種控制模式的參數區別開來。(,)、(,)、(,)分別為低頻和高頻模式下不同壓力段的局部控制參數。
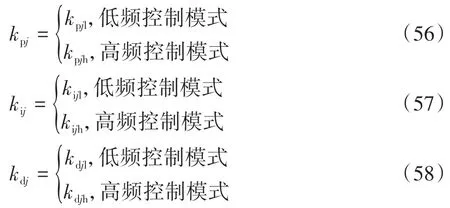
式(56)~式(58)中低頻控制模式為常規制動,高頻控制模式為ABS 控制(相應頻率的點制動也被識別為高頻控制模式),實際控制頻率(高頻和低頻的界定)按照設計的系列目標壓力值、、、…、p的重復調用周期進行計算和設定,以控制模式為系統調度變量。
基于eBooster 的壓力控制(試驗用制動主缸缸徑為25.4 mm)如圖11 和圖12 所示。從圖中可以看出,所研發的eBooster執行器與控制算法可以實現以下性能:0-10 MPa階躍響應時間為160 ms、0.1 MPa液壓制動力的控制精度,可以實現制動主缸液壓力快速、精準的控制。無論從建壓時間還是控制精度,都可以滿足ABS 功能實現的液壓力控制性能需求。
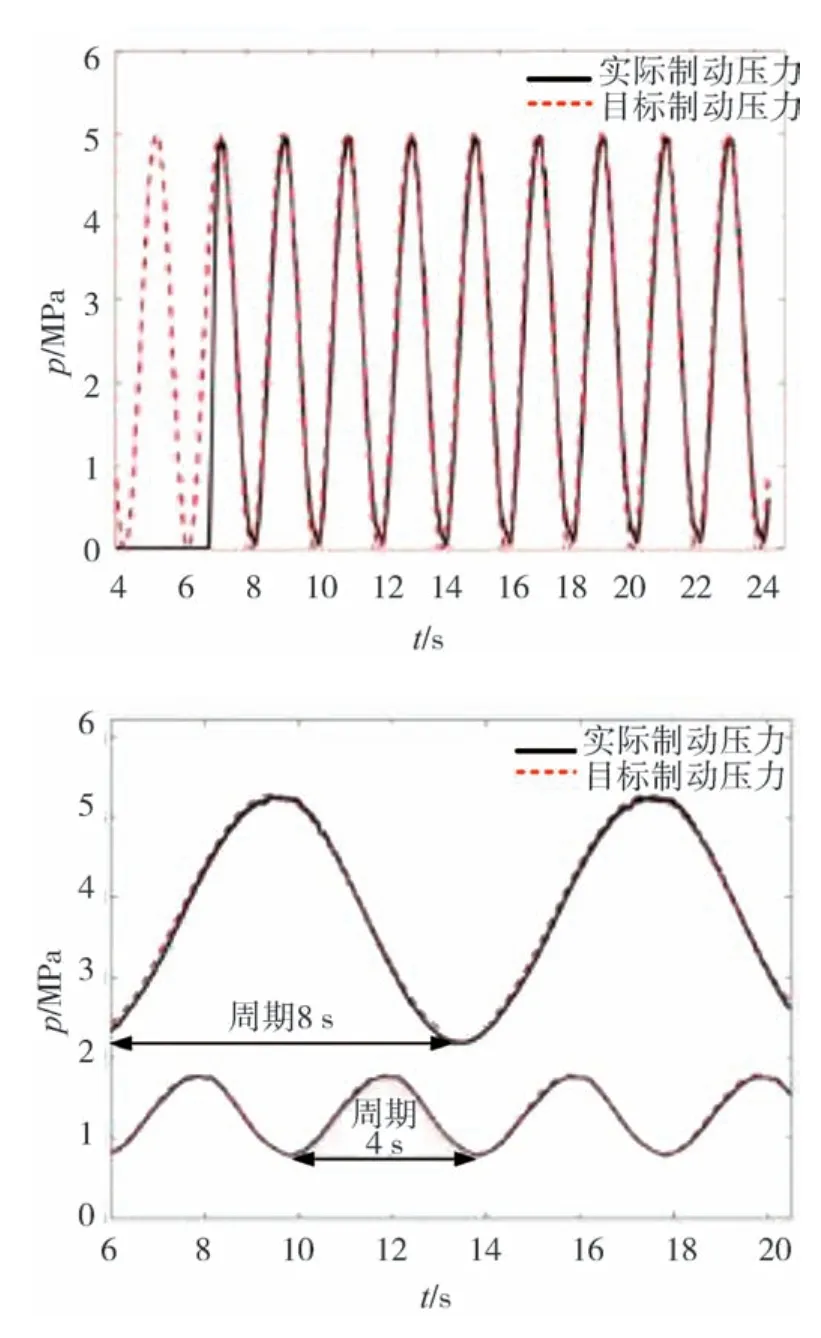
圖11 正弦壓力控制效果
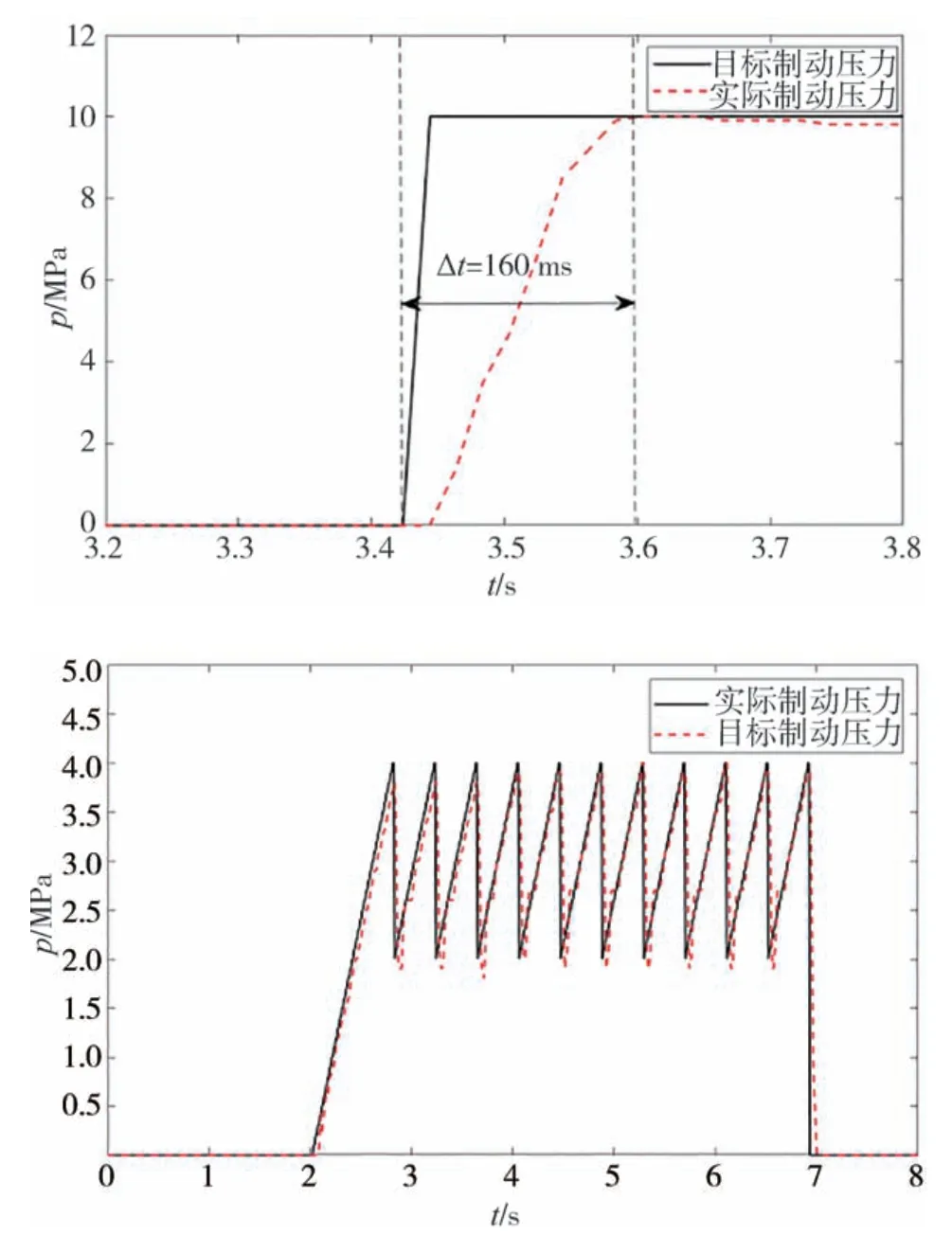
圖12 階躍和斜坡壓力控制效果
3.3 冗余ABS介入退出機制
當制動踏板開度大于0、車速大于5 km/h、原車ABS系統故障,基于eBooster的冗余ABS控制算法啟動。車速小于5 km/h、原車ABS 系統恢復正常工作時,冗余ABS 控制算法退出。基于eBooster 的冗余ABS 控制算法作為失效備份系統,應首先考慮車輛安全性,其次最大程度地提高系統制動強度。因此本文使用“后輪低選、四輪監測”的控制策略。表2為冗余ABS控制算法的控制策略。
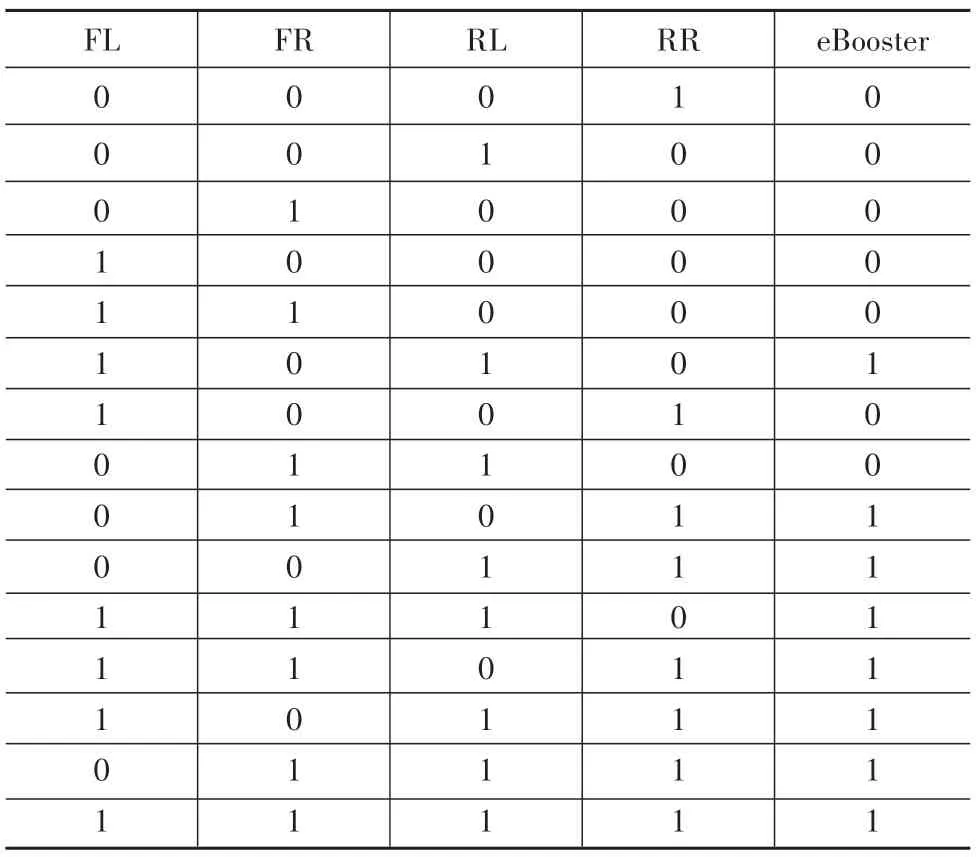
表2 冗余ABS控制策略
4 實車試驗與分析
4.1 實車試驗
選取黑龍江省五大連池市紅河谷ABS試驗場進行基于eBooster 的冗余ABS 控制算法驗證。該試驗場地有專業的ABS測試道路,分高附著系數、低附著系數、對開、對接等道路。試驗人員與試驗車輛如圖13所示。

圖13 試驗人員與場地
試驗車輛為長城哈佛HAVAL(H6)2019 款,車身尺寸4649 mm×1852 mm×1710 mm、整備質量1 592 kg。為保證試驗安全性和一致性,將試驗車改裝為全線控底盤車,包括電子助力器線控制動系統、線控油門裝置、線控轉向系統。同時裝有制動主缸和輪缸的壓力傳感器,數據采集設備以及視頻采集設備。試驗車見圖14,試驗結果見圖15。
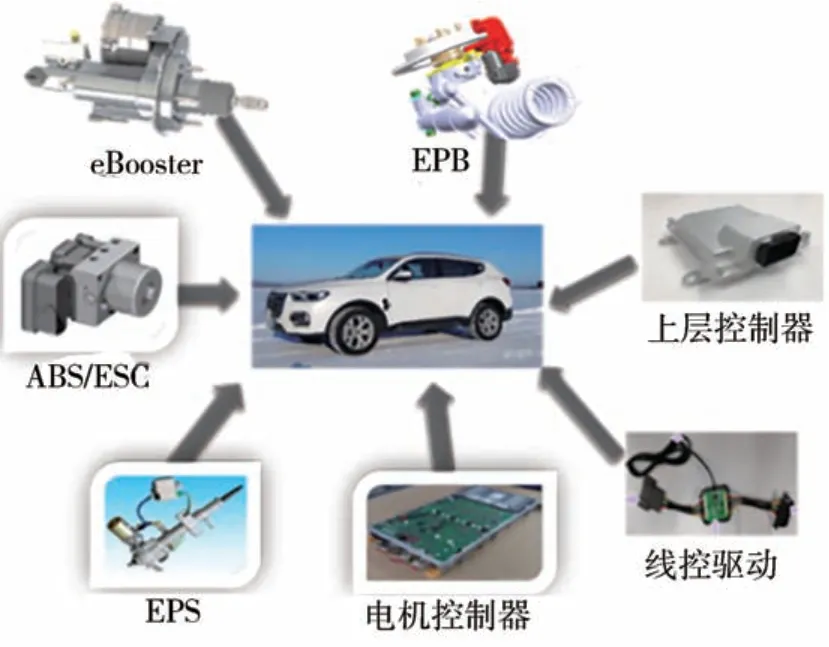
圖14 線控底盤試驗車
從圖15 可以看出:在低附著系數路面上,制動壓力控制稍大,車輪滑移率就會發生較大變化,在實現冗余ABS控制時需要較小的增減壓梯度。從低附著系數路面躍變到高附著路面時,初始制動壓力較低,車輪不會發生抱死,滑移率處于減小的狀態,但車輛完全進入高附著系數路面后,應當提高系統的增壓梯度,使從高附著系數到低附著系數路面躍變時,制動壓力無法完成從高到低的階躍變化,在路面躍變瞬間,車輪滑移率會迅速增加,這時的系統控制難度增加,波動幅度和頻率也變大,是較危險的工況,此時應盡快完成高附到低附減壓梯度的調整。在對開路面上,基于4 個車輪最多只允許一個前輪抱死的基礎上,為盡可能增大制動強度、減小制動距離,可以適當增大控制系統的增減壓梯度。綜上可以看出,所提出的基于eBooster 的冗余ABS 控制算法,在原車ABS系統失效或發生故障時,可以很好地實現制動冗余防抱功能,在很大程度上提升車輛的安全性。
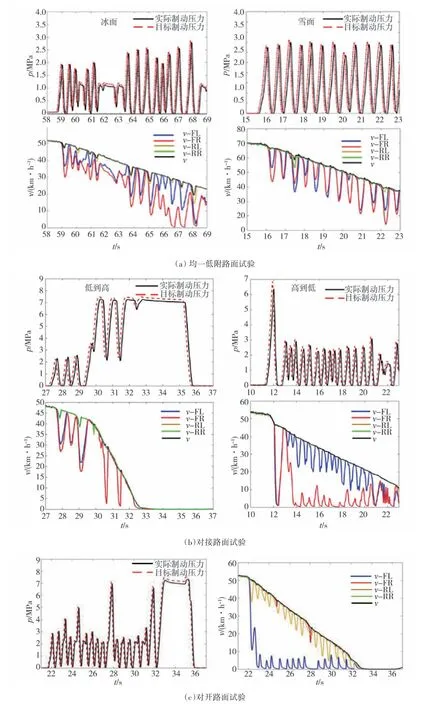
圖15 實車試驗結果
4.2 性能對比
利用控制變量法對比基于eBooster 的冗余ABS控制與原車ABS控制的效果。為盡量控制其他外在條件的一致性,將外在影響因素降到最低。利用線控油門給車輛加速確保制動時車速的一致性與準確性,用線控制動給車輛施加制動力,確保制動力的一致性,測試試驗道路選用同一條,確保路面摩擦因數的一致性。駕駛員作為安全員隨時準備控制車輛的轉向、制動與加速,以確保在危險情況發生時進行人員干涉。
低附路面制動距離對比試驗結果如圖16 所示。低附路面測試時,車輛保持直行,制動主缸壓力3 MPa,車速分別為20、40、60 km/h 的情況下,原車ABS 控制實測制動距離為10.37、42.22、106.89 m,基于電子助力器eBooster 冗余ABS 控制的制動距離為10.55、43.90、109.25 m。對比以上數據可以發現,從制動距離來看,本文所提出的控制算法可以很好地實現穩定性控制和制動距離保持。
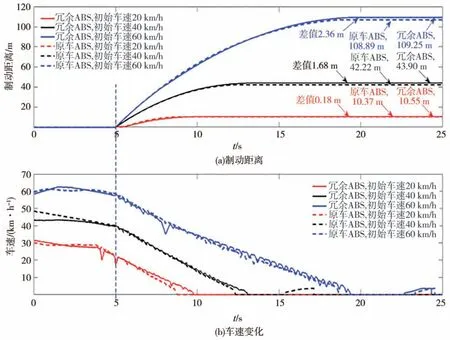
圖16 低附冗余ABS與原車ABS制動距離對比
對開路面橫擺角速度極值性能對比試驗結果如圖17 所示。車輛在對開路面進行測試時,車速在40 km/h 施加制動至車輛停止,制動主缸壓力為2、6 MPa,原車ABS控制實測橫擺角速度極值波動幅值分別為2.47、5.23(°)/s。基于eBooster 的冗余ABS控制實測橫擺角速度極值波動幅值分別為3.78、7.85(°)/s。對比以上數據可以發現,從制動橫擺角速度極值波動幅值來看,基于eBooster 電子助力器制動主缸壓力調整的冗余ABS 控制算法在制動舒適性上會有所下降,橫擺角速度極值波動幅值較大。
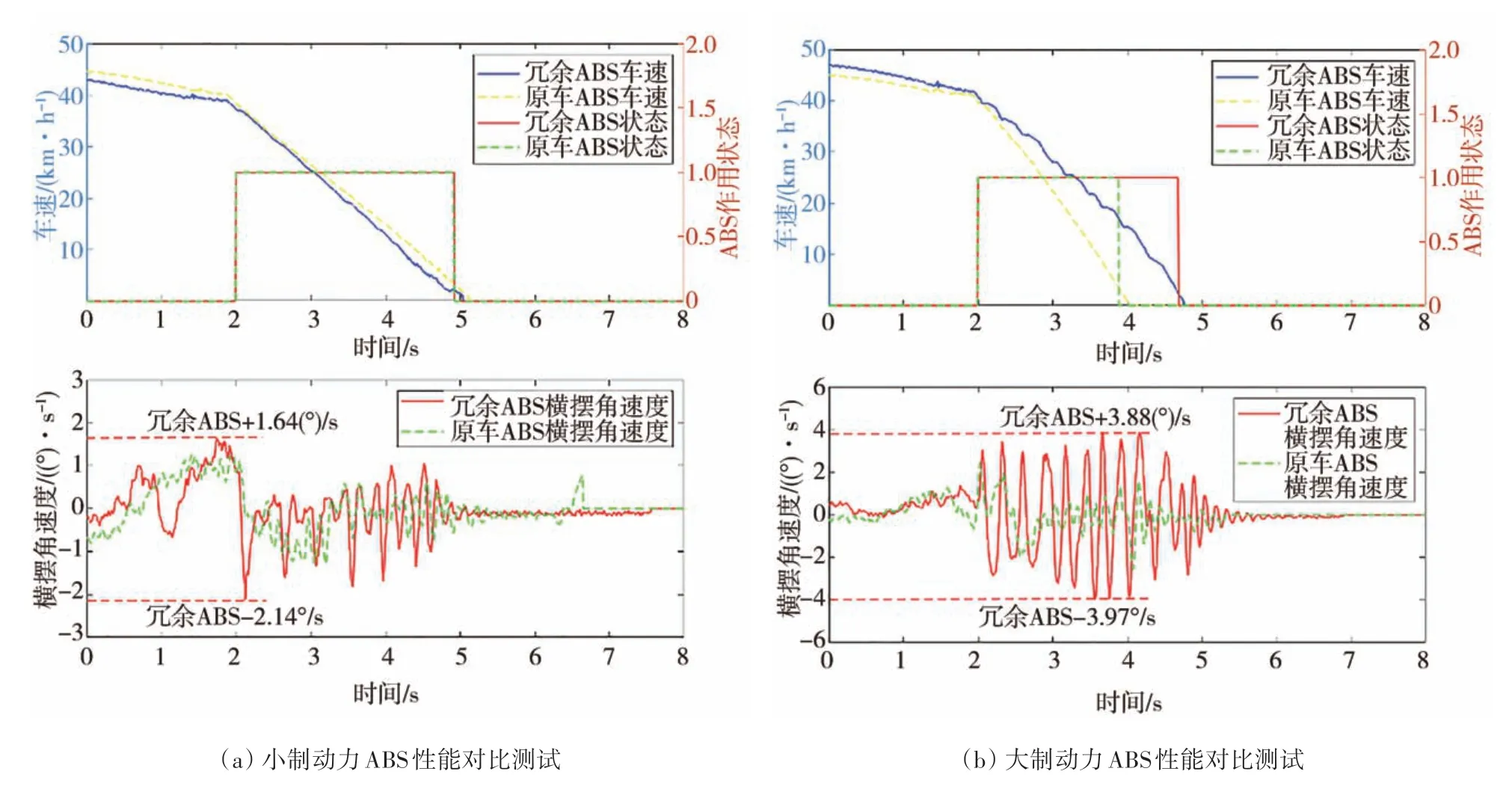
圖17 對開路面冗余ABS與原車ABS舒適性對比
5 結論
通過半解耦電子助力器可以實現對制動主缸液壓力快速、精準的控制,所提出的“基于電子助力器的冗余ABS控制算法”能夠在綜合考慮制動安全、制動距離、制動舒適性的基礎上,很好地實現冗余ABS功能,提高車輛行駛安全性,主要結論如下。
(1)自主研發了一種半解耦式電子助力器,基于變增益PID 控制算法實現對該電子助力器制動主缸液壓力的精準控制。
(2)針對傳統ABS功能失效的情況,通過對車輛制動過程中各狀態變量的估算和監測,構建冗余ABS控制算法的介入和退出策略。
(3)基于滑模控制算法,對車輪的滑移率進行控制,利用電子助力器對制動主缸液壓力的調整,實現冗余ABS功能。
(4)通過均一低附路面、對開路面、對接路面的實車測試,驗證了該冗余ABS 控制算法及策略的有效性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19