基于霍尼韋爾PKS的乙醇醪液的溫度控制系統設計及應用
2022-02-18 02:50:40喬冠寧孫明革
吉林化工學院學報 2022年9期
關鍵詞:模型
喬冠寧,孫明革
(吉林化工學院 信息與控制工程學院,吉林 吉林 132022)
醪液溫度是乙醇發酵過程的一個重要參數,確保溫度在控制要求范圍內,對于乙醇發酵的效率,有著決定性的影響.在以往的工業流程中溫度控制具有較大的滯后,會導致控制系統不能及時響應、溫度波動大、調節動作頻繁等不良效果,因此溫度控制一直是控制系統中的難點.
研究的對象是某公司30萬噸/年燃料乙醇搬遷改造項目中的發酵溫度控制系統.在化工流程工業的控制中,PID是應用最為廣泛的控制策略[1].PID控制具有調整簡便、穩定好的優點,但也存在局限性,當工程師將其應用于溫度等具有大慣性和純滯后特點的被控對象時,結果通常是不理想的[2-3].同時PID控制算法不能及時獲取閥門磨損等器件精度的變化,而對控制參數進行調整,因此,使得后期的控制精度下降影響生產效率.與之相比,預測控制的基本思想是通過過程模型和控制算法來預測未來的狀態,并產生當前的控制輸出.模型預測控制器將過程的測量值和由過程模型得到的期望響應相比較,當模型和實際過程所得出的數據有偏差時,偏差被反饋到控制器中,用以校正下一個周期的計算.這使得預測控制技術在理論上解決了較大純滯后的控制過程[4-5].Profit Loop是霍尼韋爾公司針對SISO控制系統的預測控制算法,同時Profit Loop可直接作用于反向作用、測量噪音等難以控制的場合,且有著較好的控制效果[6].
1 乙醇發酵溫度控制系統
1.1 乙醇發酵的溫度特性
以發酵溫度為被控量的溫控系統如圖1所示,要由發酵罐、換熱器組成,其主要擾動是發酵過程產生的熱量對醪液溫度的影響.通過將發酵罐中的醪液利用泵進入換熱器,與冷卻水進行熱交換,從而達到降溫作用.圖中TT1和TT2檢測發酵罐中的溫度,TT4檢測經過換熱器醪液的溫度,通過控制冷卻水的閥門開度,控制冷卻水的流量,從而實現醪液溫度的自動調節.其中,根據工藝要求在20 ℃和28 ℃冷卻水中選擇一種作為冷卻水.

圖1 乙醇發酵的溫控部分
在乙醇發酵溫度控制系統中,發酵過程產生的熱量導致醪液溫度上升是影響溫度的最主要因素.其中發酵罐體積大、溫度分布不均勻,溫度調節存在滯后,不能及時在控制范圍內調節溫度,因此降低了發酵效率.
1.2 乙醇發酵溫度控制策略
在乙醇發酵溫度控制系統中,PID控制器基本可以滿足生產要求.但Profit Loop控制器對過分控制和控制不靈敏之間的平衡有著更好的表現.Profit Loop的控制方法可使工藝調節平衡情況下調節閥的動作最小,有效地減少了閥的振動和閥桿的反復摩擦,提高了閥的使用壽命.
乙醇發酵溫度控制系統采用了串級控制系統,如圖2所示,副回路采用傳統的PID控制;主回路針對溫度控制的非線性和溫度滯后的因素,采用Profit Loop算法進行控制[7].
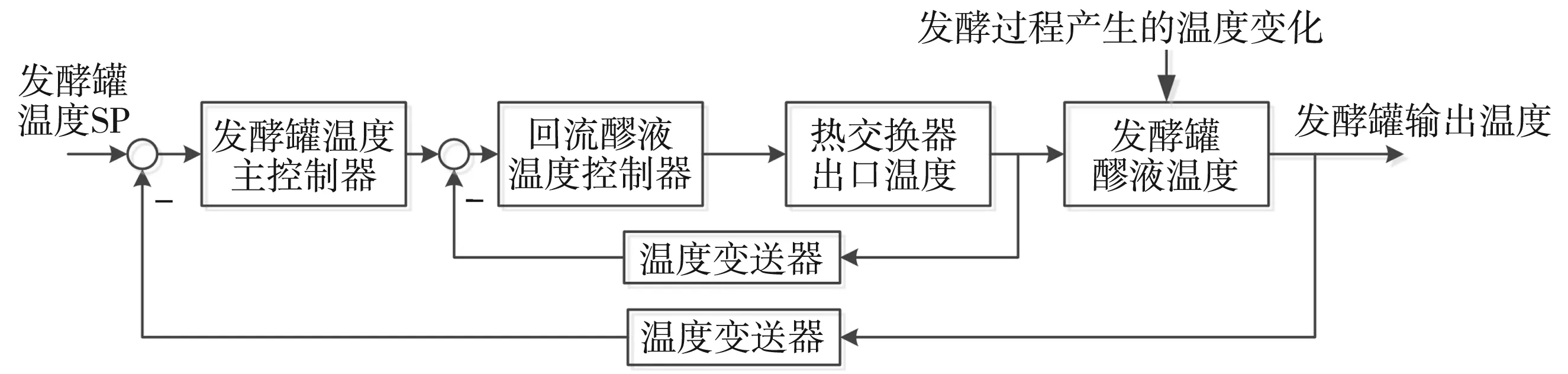
圖2 乙醇發酵溫度控制方框圖
2 Profit Loop控制器的應用
2.1 Profit Loop的控制原理
Profit Loop控制器是內嵌在PKS DCS系統中的SISO模型預測控制器,它的實質是根據過去和現在的過程變量,用一個簡單的過程模型來預測將來過程變量的動作.當Profit Loop控制器滿足操作目標時,內置的優化器用同一個模型滿足控制目標.通過對被控對象的實時辨識,得到準確的被控對象模型.模型預測控制方框圖如圖3所示.
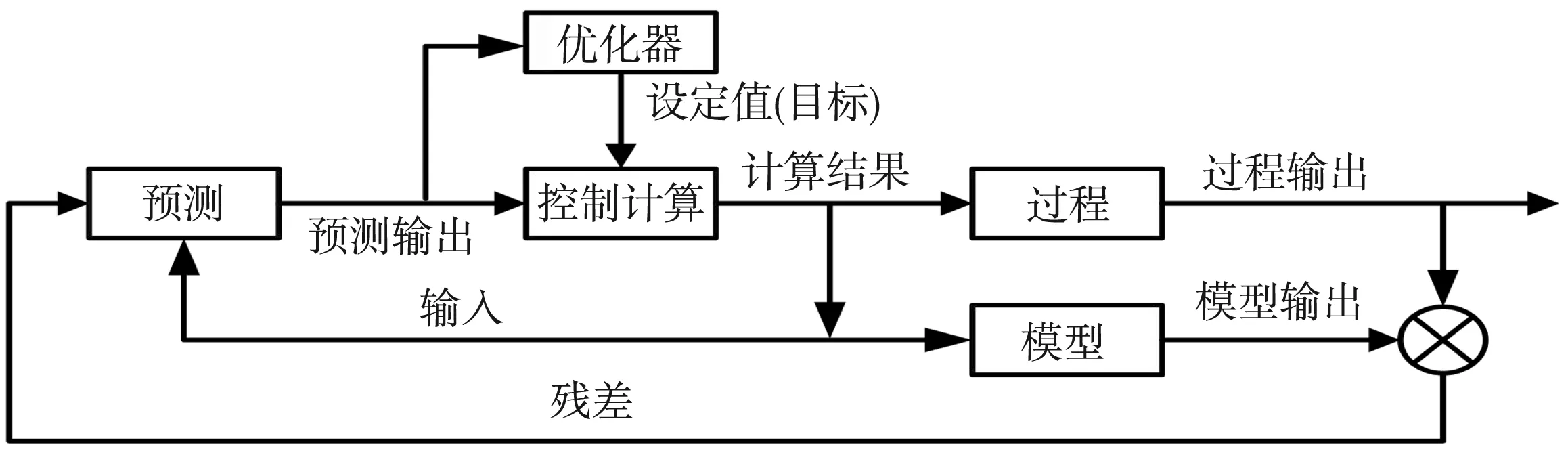
圖3 Profit Loop模型預測方框圖
2.2 Profit Loop控制器的實施
2.2.1 模型的建立
Profit Loop控制器是集成的過程建模工具,其獲得過程模型有4種方式:
1.根據回路類型直接定義模型參數,然后再根據個體回路類型對模型進行修改;
2.通過階躍測試獲得系統模型;
3.通過現有的PID參數進行計算得出;
4.借助現有的系統拉普拉斯變換模型,也可以采用直接輸入的方式,通過離線辨識模型的工具軟件,把PKS中的歷史趨勢導入該軟件中進行離線模型辨識,也可以得到良好的系統模型[8].
在乙醇發酵溫度控制系統中進行階躍測試,獲得預測模型.通過給溫度傳感器施加階躍信號,根據響應曲線獲得模型參數.根據軟件操作步驟,最終通過多次辨識來獲取相關控制參數.
2.2.2 模型的預測
通過將Profit Loop所獲取的動態模型放置到控制器中的方法,來進行預測.把控制器過去的OP值和預測得出的將來的PV值聯系起來[9],其傳遞函數形式可由式(1)表示出來.
(1)
式(1)中K代表過程增益系數;T為滯后時間;n和d表示動態模型系數.預測PV軌跡如圖4所示.

圖4 預測PV軌跡
2.2.3 控制器的建立及運行
在Control Builder中,Profit Loop是通過PID-PL邏輯功能塊實現的.實現它的過程與實現其他的控制策略的步驟相同,最基本的就是創建一個控制模塊,再把PID-PL功能塊添加到控制模塊中.Profit Loop組態控制邏輯圖如圖5所示.
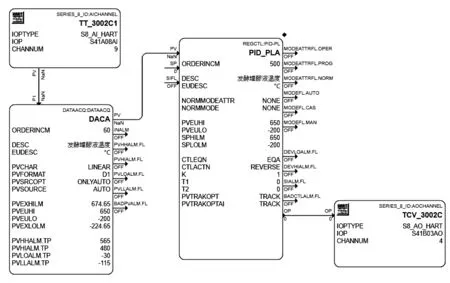
圖5 Profit Loop組態邏輯圖
完成測試評估后,將模型下載到霍尼韋爾PKS系統的C300控制器中運行,一旦計算出PV(測量值)將來的運行軌跡,控制器就會采取相關的控制動作,滾動計算促使PV值靠近SP(設定值)值減少控制器的偏差[10].運行之后在Profit Loop PKS Assistant可以觀測到實時趨勢和圖表.
3 Profit Loop應用效果
在未開工的實際工程中進行控制系統調試,通過將PID和Profit Loop分別置入乙醇發酵溫度控制器中,得到如圖6~7所示的兩條控制曲線.
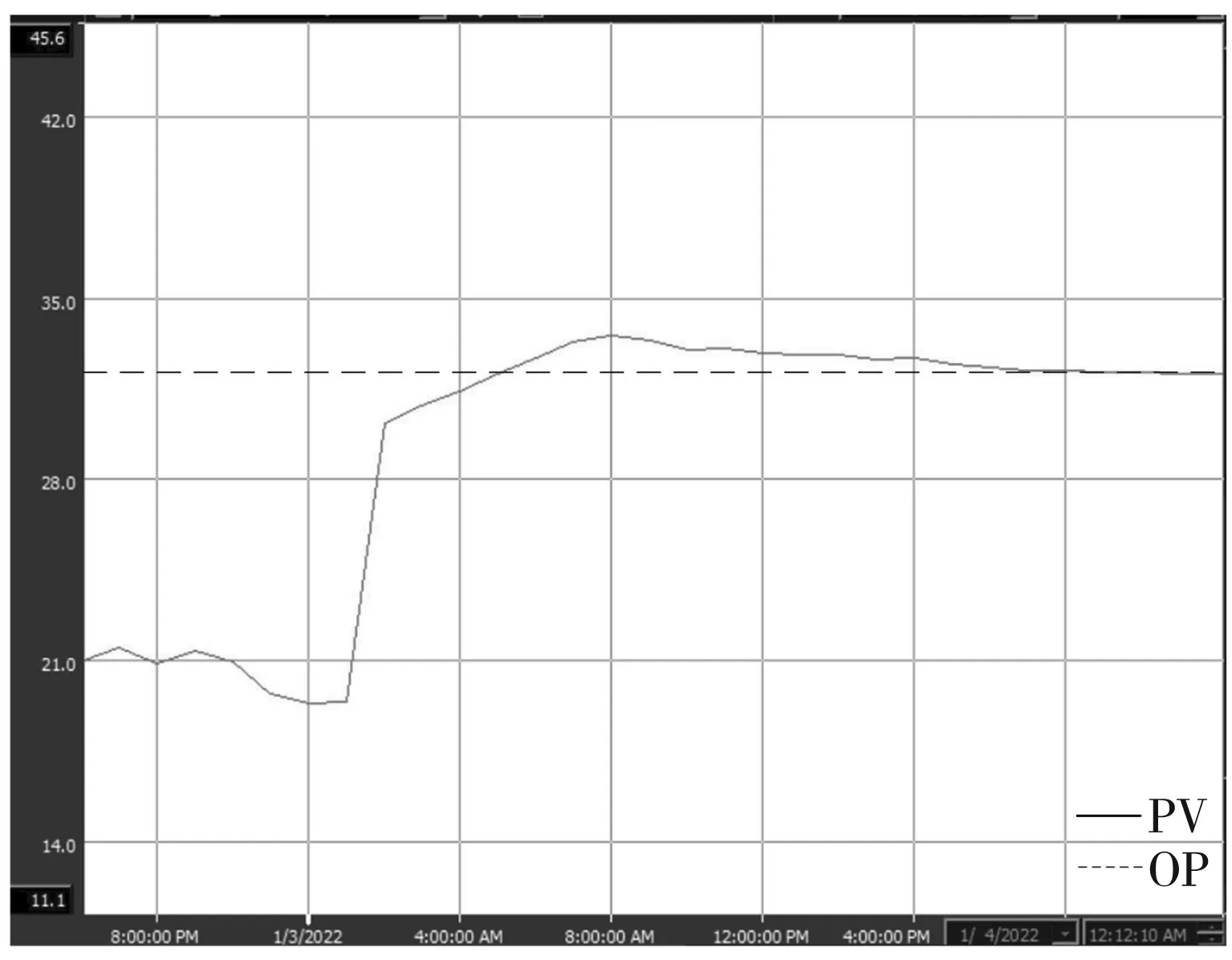
圖6 乙醇發酵溫度控制PID控制曲線
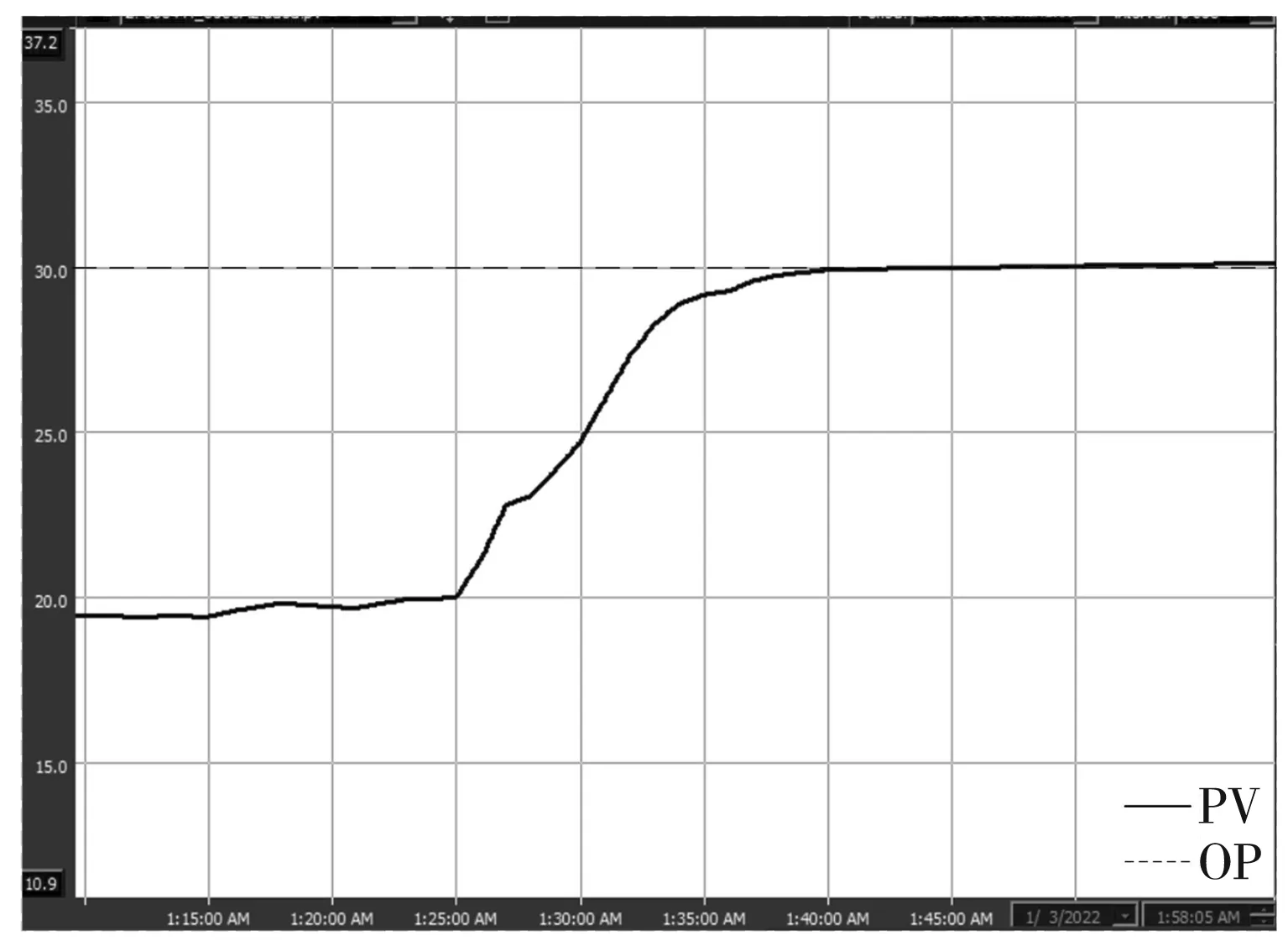
圖7 乙醇發酵溫度控制Profit Loop控制曲線
將Profit Loop投入到實際的乙醇發酵溫度控制系統中,由圖5和圖6的比較可以得出,投入PID的溫度控制系統,在運行時溫度變化不平緩,并且存在超調,達到設定溫度的時間也較長.Profit Loop的實際控制效果較好,不但溫度穩定,而且可以看出變化曲線波動平穩,變化小.這表明執行機構運行變化頻率降低了,大大減輕了執行機構的負擔,使得執行機構的使用壽命得到了延長.
4 結 論
以乙醇發酵溫度控制系統為研究對象,利用Profit Loop控制器實現乙醇發酵溫度的控制,并進行了現場驗證.從Profit Loo乙醇發酵溫度控制曲線,可以看出Profit Loop控制器在乙醇發酵溫度控制系統中控制效果良好,有效地降低了溫度控制滯后帶來的影響,提高了發酵溫度控制精度,達到了優化節能的目標,具有較為廣闊的應用前景.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19