精準高空拋出點定位儀
2022-02-21 01:45:04王文杰穆業帥李金龍何林興魯婷婷張春志
科學技術創新 2022年2期
王文杰 穆業帥 蘭 鵬 李金龍 何林興 魯婷婷 張春志
(哈爾濱石油學院,黑龍江 哈爾濱 150000)
1 儀器研究背景
隨著我國人口的快速增長和房地產業的開發,辦公樓、居民小區等樓房高度逐漸提高,密度大和高度高成了我國房地產開發樓房的新趨勢。然而,這些高空建筑又為社會帶來了新的問題,一些人的文明程度跟不上時代的發展,使得高空拋物成為近代以來社會上出現的一個焦點問題,頻發的高空拋物案件不斷地刺痛著人們的眼睛。高空拋物行為危險系數極高,近年來不斷出現高空拋物所引發的案件,給人們帶來了極大的人身危害,嚴重擾亂了社會治安,許多人開始呼吁,希望能夠及時解決高空拋物問題[1]。解決高空拋物問題成為了一個迫在眉睫的事情。
目前,對于解決高空拋物問題所采用的主要方法有人工巡邏、攝像監控和法律監管。
基于攝像技術的監控是許多學者認為對高空拋物問題的有效解決方案。許多地區都采用多重多種攝像監控設備,以此來對人們進行震懾和約束。許多小區、辦公樓安保部門都耗費巨資,在主要的道路旁和建筑下架起了各式各樣的攝像頭,通過事后追責的方式來對高空住戶進行威懾,以此來減少高空拋物事件的發生。這種方式雖然有效,但是仍存在設備數量多、無法提供實時追蹤、后期信息處理工作任務重等問題。
法律監管。各國對高空拋物問題均有開展立法治理。其中,根據《中華人民共和國民法典》第一千二百五十四條之規定:從建筑物中拋擲物品或者從建筑物上墜落的物品造成他人損害的,由侵權人依法承擔侵權責任;經調查難以確定具體侵權人的,除能夠證明自己不是侵權人的外,由可能加害的建筑物使用人給予補償。可能加害的建筑物使用人補償后,有權向侵權人追償。
本課題的研究旨在通過外部監管協助的方式,減少高空拋物行為對人類自身和財產安全帶來的威脅,能夠在高空拋物事件發生后,定位到具體住戶或個人,減小事后追責的難度,提升社區管理效率。同時記錄高空拋物的實時數據,進行分析、處理和上報。
2 儀器的基礎-CCD 模塊
定位儀主要傳感器部件為CCD,它具有以下特點:靈敏度高、響應速度快、技術成熟、噪聲低、成像質量高、自動掃描、圖像畸變小和無殘像。

圖1
2.1 CCD 傳感器的分類
線陣CCD 傳感器是通過使用一列像素對目標圖像進行掃描,而后分別通過紅、綠、藍三色濾鏡進行三次曝光,從而達到捕捉到一維圖像。線陣CCD 一般將CCD 內部電極分成數組,一組稱為一相,并且時鐘脈沖施加是相同的。所需相數由CCD 芯片內部結構決定,結構相異的CCD 可滿足不同場合的使用要求。線陣CCD 也有區別之分,分別為單溝道和雙溝道,其中光敏區是MOS 電容或光敏二極管結構,生產工藝方面相對來說比較簡單。其特點是外圍電路簡單,容易實現實時控制,處理信息速度快。線陣CCD 的研發主要用于平面廣告、掃描儀、復印機等受移動局限連續光照的線性陣列物體。
面陣CCD 傳感器是通過兩列二維像素對目標圖像區域進行掃描,在一次曝光中可以以任意的快門速度來及時捕捉所需二維圖像,其主要運用于高級數碼相機和監控器等方面。在高空墜物時,落下的物體由于具有一定的加速度,速度持續加快,這時,面陣CCD 的快門捕捉就起到了作用。
傳感器三線CCD 是通過三列并行的像素分別對RGB 濾鏡進行覆蓋的,傳感器三線CCD 主要用于高端的數碼相機,以求取更高的分辨率。
2.2 CCD 與CMOS 的結構組成
圖2
電荷耦合元件(Charge-coupled Device)能夠將光學信號(光線)轉換為模擬電流信號(電荷),通過放大信號電路和模數轉換,從而實現對圖像的攝取、儲存、傳遞、處理和再現。CCD 光電傳感器主要由感光二極管組塊、讀出移位寄存器、并行信號寄存器、信號放大電路和模數轉換組塊組成。CCD光電傳感器將光信號轉化為電信號后,通過轉換電路輸出到讀出移位寄存器,經過信號放大電路和模數轉換組塊實現圖像的輸出,從而完成圖像的輸入與輸出工作。CCD 器件由硅材料制成,其特色在于充分保持信號在傳輸的時候高度保真。
CMOS 稱為“互補金屬氧化物半導體”,CMOS 的技術實際上只是將晶體管放置在硅晶塊上,只是CMOS 的每個像素需要單獨搭配一個“放大器”,這就會帶來了兩個問題:一方面,在每個像素中“放大器”都要占用一定面積,這部分面積不能感光,會直接損失圖像;另一方面,要讓每個“放大器”的放大效果保持均衡很困難,這也會增加噪點。CMOS 制作的流程相對簡單,沒有專屬的通道設計,需將各個像素的資料先行放大再進行整合。
2.3 距離傳感器
距離傳感器是利用激光或超聲波來測量物體距離的傳感器,其主要作用是,用來測量物體的位置隨時間變化的規律,使用它可以完成多種運動學和動力學測定。譬如,墜落物體的高空測速。并且,距離傳感器作為一種可靠的工具,可用于各種應用,以實現精確、快速的測量和廣泛的材料發現。用于高空拋物中,可起到一定的作用。距離傳感器的工作原理是產生某種波,比如激光、紅外發光二極管或超聲波。然后它會讀取波傳播回來后的變化情況。這種變化主要取決于返回信號的強度和返回所需的時間等。
3 目標圖像追蹤方法
幀差法:要想在視頻中捕獲到物體的物理移動軌跡,就需要將視頻長度無限細分,得到單張的圖像,再通過二維坐標定點分析,從而整合到物體的移動軌跡,這種方法也叫做幀差法。當兩個圖像的時間間隔足夠小時,圖像中的像素點基本是相同的,當像素點發生變化,也就是物體進行移動時,對應的像素點也會發生變化,從而通過對比得到目標物體的移動軌跡。公式為:Ik-1(x,y)的差分圖像。

注:Dk(x,y)是第k 幀圖像Ik(x,y)和第k-1 幀圖像
而后,進行差分圖像的閾值分割[2],進而得到二值化[4]的前景圖像:

注:Tk(x,y)為二值化的前景圖像。
背景差法:背景差法是通過提前建立好背景模型,后期通過單幀圖像與背景模型進行對比,從而對目標區域進行檢測。目前建立背景模型的方法主要有:中值背景建模法、均值背景建模法、單高斯分布模型法和混合高斯分布模型法[8]。背景差法的公式為:

注:Bk-1(x,y)是建立的背景模型[9]。
以上在進行了運動目標檢測后,在視頻測速系統中也是通過跟蹤得到的運動軌跡來計算運動目標的速度。接下來,對運動目標進行跟蹤,其目標跟蹤目的是想用于定位儀獲取的圖像序列進行分析,從而利用二維坐標系計算出目標在每幀圖像時刻的目標,根據不同的特征值,再將圖像序列內不同幀率的同一運動目標關聯在一起,進而得到運動目標完整的運動軌跡。
4 儀器的基本結構與運行
該儀器是基于CCD 的近紅外定位儀,將兩個CCD 定位儀相隔一定高度放置。首先讓定位儀對靜止背景進行圖像采樣并保存,隨即定位儀采集的圖像不斷的和原背景圖像做差分運算來檢測拋出物體,即計時信號觸發。當定位儀1 檢測到有拋出物體進入并且運動到測量標線后,此時監測端計時開始;之后定位儀2 也檢測到拋出物體進入并且運動到測量的標線時,計時結束。此時可以得到兩個定位儀檢測到運動物體的時間差,由于兩個定位儀測量區域包含的測量標線間距離是固定值,所以用這個固定的距離值除以兩定位儀檢測到物體的時間差值,此時運動物體的速度就可以計算出來。由于兩個定位儀放置的間距很近,并且傳感器CCD 采樣頻率很高。因此對于測量運動物體或者運動物體速度是可行的,并且測速的系統具有較高的精確度,為了使CCD 光電傳感器能夠正常工作,需要有時序的產生及相應的驅動模塊[6][10]。

圖3
在兩層AB 單元中間布置一根高3 米的立桿,兩個定位儀以上下對稱排布,其監測范圍覆蓋AB 單元所夾道路,保障拋物行為能夠得到記錄和監測。

圖4
兩臺內置面陣CCD 圖形傳感器及距離傳感器儀器全天工作,監測兩面樓層。當物體出現在面陣CCD1 圖像監測范圍內,即進行第一次連幀記錄,而物體經過面陣CCD2 時則進行第二次連幀記錄,以及距離傳感器對拋出物體距離的獲取,通過儀器的工作將數據進行上傳,此時硬件工作已完成。其中面陣CCD1 連幀的畫面提供了初速度、角度、變化及拋體運動類別。結合面陣CCD2 的連幀畫面,可計算得出某時刻的瞬時速度,原因如下:面陣CCD1 與CCD2 兩臺儀器設備之差為△x,選取的兩張圖片幀差時間間隔為t,即可得出物體在某時刻的瞬時速度。由于面陣CCD1 上傳的連幀畫面在軟件層次判斷出拋體運動類別,從而做出不同的處理,來解決現實問題中高空拋物的各種類型。如斜上拋、斜下拋、平拋、豎直上拋和豎直下拋,實現在VisualC++中調用不同函數進行處理數據和呈現數據。采用Visual C++ 開發環境,該開發環境為源代碼編輯、源代碼瀏覽、項目管理與配置和調試工具提供強力支持。由于距離傳感器數據的傳輸會判斷出被拋物體到儀器的距離,這也是鎖定窗戶的條件,而要鎖定居民住戶則需要進行窗戶編號,此方法便于信息呈現和記錄查找。當面陣CCD1 監測到物體出現時,產生計時觸發信號,這個時間點呈現在拋物記錄信息條中。抓取的圖片進行二維坐標分析處理,以道路長度為x,定位儀監測范圍高度為y,這樣就把空中拋出物體在二維坐標系中以一個點呈現,尋找拋出點就是在找如圖中的初始點P[3][7]。
距離傳感器通過發射能量波束并由被測物體反射,計算波束發射到被物體反射回來的時間,來計算與物體之間的距離。這種傳感器測量精度高,可以精確測量距離,針對距離變化產生信號的傳感器原理和形式多,距離傳感器并不要求對距離做出定量檢測,只需判斷在設定的距離范圍內是否有物體出現。
據以上距離傳感器數據的傳輸會判斷出被拋物體到儀器的距離,這也是坐標尋找的條件,窗戶編號鎖定居民住戶,此步驟可以找到對應的坐標x,從而找出物體拋出點。
以上拋出點的尋找可以二維坐標呈現和分析如圖5。

圖5
在顯示是模塊,本次高空拋物數據以信息條呈現,并截取此時間點的拋物連幀視頻展現于信息條中,而后以傳統視頻模式播放。如圖6。
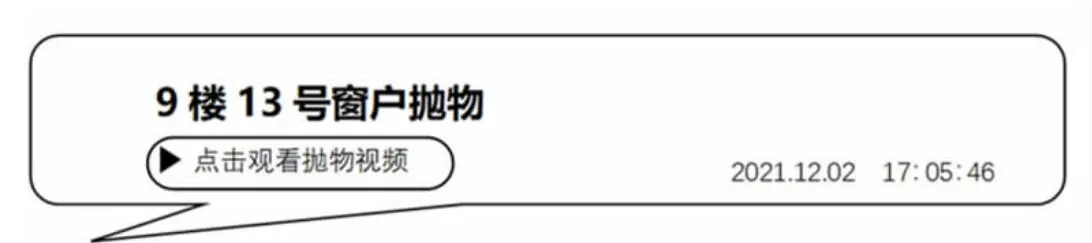
圖6
這樣,無論是否發生事故的高空拋物事件,都會記錄事件處理和警報的數據,觸發的警報裝置便于提醒物業及管理人員處理,也可向公安機關呈交數據。
5 總結
本定位儀主要以雙面陣CCD 傳感器作為圖像采集前端裝置,以計算機軟件作為圖像分析處理和信息儲存裝置,通過對目標圖像進行二維化分析,使拋出點轉化為二維坐標并通過軟件系統分析處理,而后將處理結果以信息條的形式呈現。本儀器的研究對于解決高空拋物問題意義重大,在解決高空拋物問題領域相對空白的情況下,本儀器能夠有效地解決高空拋物相關問題,并為以后的相關研究提供有效的參考。對于該儀器未來可能進行的研究,將會從數據的精確度和儀器的實際應用方面進行展開。