基于多智能體系統(tǒng)一致性的智能電網自愈控制研究
2022-02-21 01:46:12陳康
科學技術創(chuàng)新 2022年2期
陳康
(南京乾佳科技有限公司,江蘇 南京 210019)
智能電網中包含了大量的電氣設備,并且由于采用分布式連接,日常的電網維護壓力較大。這種情況下很容易因為養(yǎng)護不到位、檢查不細致,導致潛在的故障沒有得到及時發(fā)現、處理,進而引發(fā)嚴重故障,造成電網局部停運。基于多智能體系統(tǒng)的自愈控制,能夠實時進行智能電網運行狀態(tài)的監(jiān)測,在故障發(fā)生初期識別故障并作出決策,自動完成故障處理,從而不影響電網的正常運行。
1 基于多智能體一致性的智能電網自愈控制系統(tǒng)
1.1 系統(tǒng)模塊連接方式
基于多智能體一致性的智能電網自愈控制系統(tǒng),共有3個模塊,分別是決策模塊、協調模塊和反應模塊,其模塊關系如圖1 所示。

圖1 智能電網自愈控制系統(tǒng)
1.2 決策模塊
該模塊是整個自愈控制系統(tǒng)的最高層,操作流程有兩個步驟:
首先進行自愈控制。根據下一級協調模塊提供的故障信息,進行故障分類、分級,包括確定故障類型、判斷故障危重程度。如果同時出現兩種及以上的故障,可通過故障分級確定優(yōu)先級,讓更加嚴重的故障得到優(yōu)先處理。根據故障分析結果,生成自愈控制指令,實現自愈效果。
其次進行快速仿真。快速仿真環(huán)節(jié)能夠保證自愈控制指令的有效性,在虛擬環(huán)境下判斷該指令后,判斷能否實現故障的處理和自愈,待仿真結果顯示達到自愈目標后,再將指令應用于實際。
1.3 協調模塊
位于自愈控制系統(tǒng)中間層的協調模塊,發(fā)揮了“上傳下達”的作用,具體操作流程為:首先,對于下一級反應模塊采集并上傳的數據信息,并對數據進行初步篩選,將正常的數據過濾掉,只保留與智能電網運行故障有關的數據,可以降低數據處理和信息分析的壓力,提高系統(tǒng)響應速度;
其次,對上一級決策模塊發(fā)送的指令,準確分配至智能電網發(fā)生故障的區(qū)域,保證故障問題得到有效解決,實現自愈。結合圖2 可知,協調模塊的具體功能包括狀態(tài)評估、故障診斷、優(yōu)化控制、預防補補償等幾種。現以狀態(tài)評估和緊急控制為例展開簡要介紹。
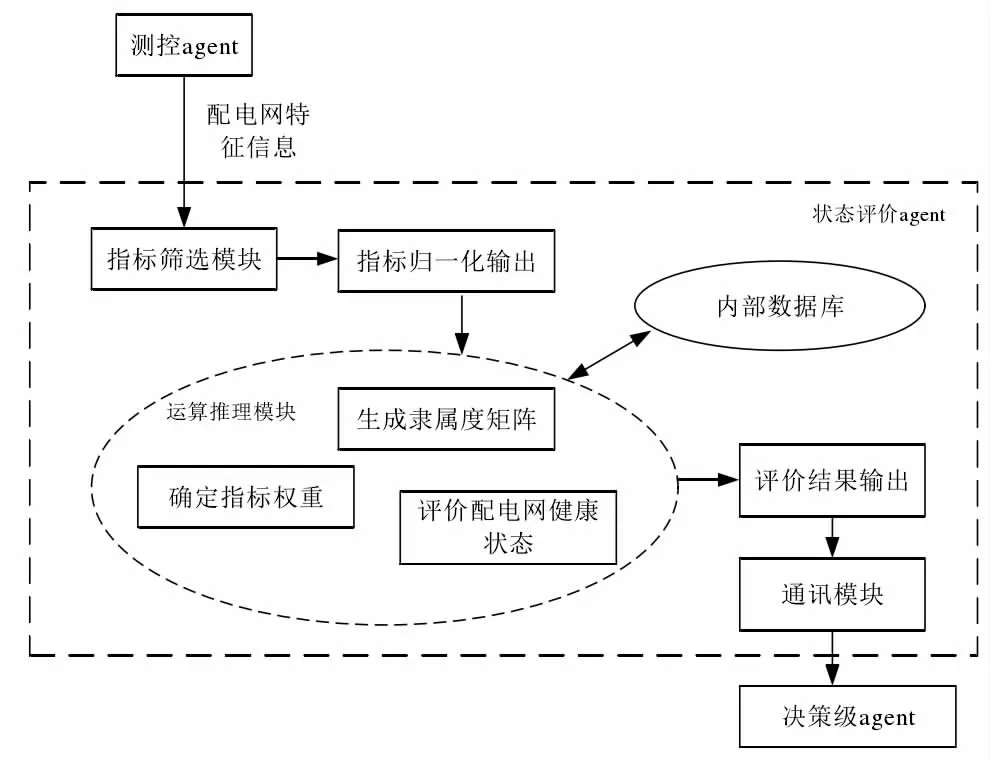
圖2 智能電網自愈控制系統(tǒng)的狀態(tài)評估流程
1.3.1 狀態(tài)評估指令。
其實現過程如下:
根據反應模塊提供的電網測控信息,對照智能電網的特征信息,對比關鍵指標的一致性;
如果關鍵指標的特征值(標準值)與實測值之間差異顯著,說明存在異常運行狀態(tài);
將所有篩選出來的關鍵指標逐一進行對比,并做歸一化處理;把計算結果輸入到運算推理數學模型中,對智能電網的健康狀態(tài)進行評價;
最終評價結果由通訊模塊上傳到決策模塊。然后決策模塊根據電網當前狀態(tài),決定采取優(yōu)化控制、恢復控制或緊急控制等策略。狀態(tài)評估流程如圖2所示。
1.3.2 緊急控制指令。根據狀態(tài)評估結果,若當前智能電網發(fā)生故障,并且故障狀態(tài)下的實時參數已經超出了約束范圍,這種情況下必須采取緊急控制,將故障區(qū)域或故障設備從電網中切除,避免引起更大范圍的連鎖反應。緊急控制的實現方式如下:參考狀態(tài)評估結果,了解當前智能電網運行狀態(tài);進行故障嚴重程度判斷,若超出約束條件,則激活緊急控制程序,自動下達切機、切負荷等指令;判斷故障部位是否從電網中切除。若未成功切除,則重復上述切除步驟,直到判斷切除成功。緊急控制流程如圖3 所示。
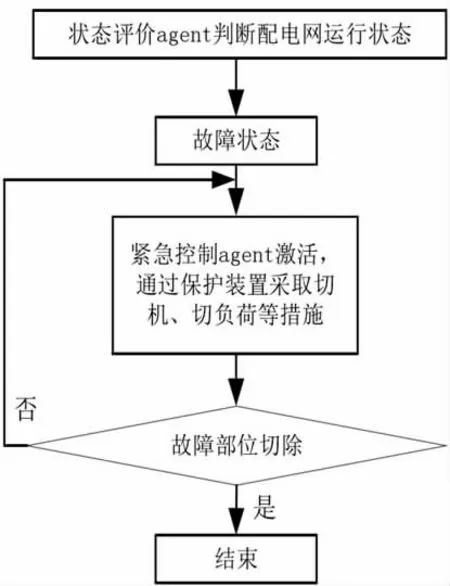
圖3 智能電網自愈控制系統(tǒng)的緊急控制流程
1.4 反應模塊
作為整個自愈控制系統(tǒng)的最底層,該部分的操作方式是:利用前端的傳感監(jiān)測裝置和無線通信設備,在獲取智能電網各部分實時運行狀態(tài)參數的基礎上,將其反饋給調度中心的數據采集系統(tǒng);
由于智能電網實時運行中產生了海量的數據,為節(jié)約網絡資源,數據采集系統(tǒng)在接收實時數據后,將數據進行暫存,然后按照特定頻率以數據包的形式,將數據信息上傳到上一級的協調模塊;
采集、上傳信息后,反應模塊還會接收上級發(fā)送的各類控制指令,并作出相應的動作。例如控制中心發(fā)送隔離指令后,位于反應模塊的隔離器動作,自動將發(fā)生故障的電氣設備從電網中切除,避免產生連鎖反應造成故障影響范圍的擴大化。
2 基于多智能體一致性的智能電網自愈方法
2.1 電網故障自愈的基本要求
故障自愈不僅要將已經發(fā)生的電網故障順利解決,保證智能電網的穩(wěn)定運行,而且還要通過拓撲結構的調整,將失電區(qū)域的負荷容量均攤到正常運行的饋線上,并且保證電網不會出現超負荷情況,防止引發(fā)二次故障。總結來說,智能電網自愈控制應滿足以下基本要求:(1)提高響應及時性和控制有效性,保證非故障區(qū)域不受影響;(2)各類開關的動作次數不宜過多。開關的動作次數與壽命直接掛鉤,如果自愈控制中頻繁開斷,會嚴重縮短開關設備的壽命;(3)分攤負荷容量時,要考慮智能電網不同區(qū)域的最大用電負荷;(4)盡量減少對電網結構的更改。
2.2 智能電網自愈方法
2.2.1 連通性判斷在故障區(qū)域或設備被切除以后,由于此部分出現斷路,周邊的電氣設備也有可能受到影響進而形成“孤島”。連通性判斷就是在準備切除故障時,預測切除故障以后局部電網能否正常運行。若連通性差,則重新優(yōu)化切除方案,提高自愈控制的實用性。假設有一個鄰接矩陣A,內部包含了n 個元素,通過計算連通性矩陣判斷故障區(qū)域和非故障區(qū)域之間的連通性,具體方法如下:
(1)在現有鄰接矩陣A 的基礎上,設計一個新的矩陣P,使P=A。
(2)對矩陣P 做初始化處理,使j=1。
(3)對所有的i,如果存在P(i,j)=1,則對k=1,2,3……n。使P(i,k)=P(i,k)∨P(j,k)。
(4)j=j+1。
(5)若存在j≤n,則返回步驟(3),重復上述步驟,直到j>n,停止。
收集所有j>n 的值,即表示能夠正常連通,反之則表示無法正常連通。
2.2.2 故障節(jié)點標記
對于智能電網中因為發(fā)生故障而失電的區(qū)域、設備,可通過重新閉合線路恢復供電。但是為保證恢復供電后的電網不存在超負荷等問題,還應做好網絡結構布局和負荷功率調整等工作。故障節(jié)點標記的作用是在確定故障區(qū)域或故障設備后,在就近的兩個節(jié)點上,分別做相應的標記。按照電流的方向,在電流的流入方向上,將最接近故障區(qū)域的節(jié)點標記為1;在電流的留出方向上,將最接近故障區(qū)域的節(jié)點標記為2。注意故障節(jié)點標記遵循就近原則并且不得重復。在故障節(jié)點1 和2 中間,即為滿足自愈控制的最小切除范圍。將該范圍內的電力設備及線纜切除,既能夠保證智能電網實現故障自愈,又可以最大程度上降低對智能電網運行的影響。
3 基于多智能體一致性的智能電網自愈仿真實驗
3.1 仿真實驗設計
上文介紹了基于多智能體的自愈控制系統(tǒng)結構組成和功能實現方式。為了進一步驗證該系統(tǒng)能否將電網常見故障做到妥善處理,在仿真環(huán)境下開展了實驗進行證實。使用Matlab 軟件進行仿真實驗。在仿真環(huán)境下構建了一個由10臺發(fā)電機、50 個節(jié)點、44 條線路組成的380kV 電網。設定基準電壓為380kV,基準功率為110MVA。進行如下實驗:模擬電力系統(tǒng)三相接地短路故障,每臺發(fā)動機剩余≥10%的備用容量。利用基于多智能體系統(tǒng)一致性的自愈控制系統(tǒng),對發(fā)生短路故障的電力系統(tǒng)進行故障自愈。選擇發(fā)電機轉速作為判斷指標。
3.2 仿真實驗結果
以發(fā)生三相接地短路故障的時間點作為起始點,記錄在故障發(fā)生10s 內的發(fā)電機轉速,如圖4 所示。
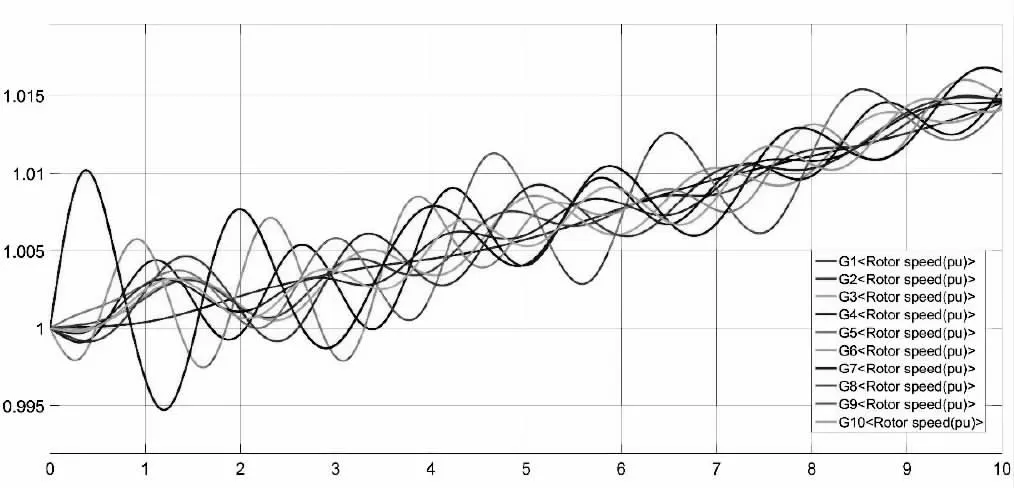
圖4 故障狀態(tài)下發(fā)電機轉速變化情況
結合圖4 可知,在電網發(fā)生接地故障后,10 臺發(fā)電機的轉子轉速發(fā)生了明顯波動。發(fā)電機出現暫態(tài)運行失穩(wěn)后,除了影響自身的輸出功率外,還會因為電壓的明顯波動,對整個電網的安全性造成沖擊影響,電網面臨崩潰的風險。
重復上述實驗,但是在故障發(fā)生1s 后,接入了基于多智能體系統(tǒng)一致性的自愈控制系統(tǒng),并記錄從接入之后9s 內的發(fā)電機轉速變化數據。將所得數據繪制成圖,得到發(fā)電機轉速在不同時間內的變化圖,如圖5 所示。

圖5 故障狀態(tài)下接入自愈控制系統(tǒng)的發(fā)電機轉速變化
結合圖5 可知,在短路故障發(fā)生后,10 臺發(fā)電機也出現了轉速波動、暫態(tài)失穩(wěn)的情況。而1s 時接入了自愈控制系統(tǒng),發(fā)電機轉速迅速穩(wěn)定下來,從第5s 開始,10 臺發(fā)電機的轉速保持一致并趨于平穩(wěn),說明三相接地短路故障已經得到自愈。
結束語
在智能電網覆蓋范圍逐步擴大的背景下,如何保障智能電網穩(wěn)定、可靠運行,成為電力公司關注的焦點問題。根據智能電網的規(guī)模,選擇若干個多智能體,按照一致性算法將其組合成為完整的故障檢測和控制系統(tǒng),能夠實現對智能電網運行工況的實時監(jiān)測,并對故障問題作出準確判斷和分級分類,然后下達相應的指令,切除故障或解決問題,在不需要人工干預的情況下,實現了自愈。仿真實驗表明,該自愈控制系統(tǒng)能夠有效解決常規(guī)的故障,為智能電網運維管理提供了幫助。
猜你喜歡
公民與法治(2022年5期)2022-07-29 00:47:28
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
中醫(yī)眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
燕山大學學報(2015年4期)2015-12-25 02:19:49
電測與儀表(2015年5期)2015-04-09 11:30:52
電力工程技術(2014年1期)2014-03-20 14:19:06