開孔定向儀中陀螺隨機漂移誤差處理與分析
2022-02-22 05:30:02燕斌
能源與環保 2022年1期
燕 斌
(中煤科工集團西安研究院有限公司,陜西 西安 710077)
瓦斯抽放是煤礦井下瓦斯治理最有效的方法,通常利用鉆機在巖巷中打穿層鉆孔和煤巷中打順層鉆孔以實現瓦斯抽放。按照預定設計的軌跡實現瓦斯抽放,一方面需要重點解決鉆進過程中的軌跡測量和控制的問題,另一方面需要解決鉆機開孔定位精度、鉆機開孔定向裝置問題[1-2]。陀螺慣性傳感器由于不受鐵磁性環境的影響特點,因而被廣泛應用于慣性導航、石油測井技術、煤田地質勘探和自動駕駛等領域。陀螺傳感器的類型較多,且具有各自特點[3]。光纖陀螺傳感器具有精度較高、體積較大、價格較高等特點,而微機電(MEMS,Micro-Electro-Mechanical System)陀螺具有體積較小、成本較低、但精度較低等特點[4]。
為了獲得較高的鉆機開孔測量精度,必須對裝置中的陀螺傳感器進行誤差補償及修正。確定性誤差及隨機漂移性誤差是陀螺儀中最主要的2種誤差[5]。一般情況下,陀螺傳感器的確定性誤差主要包括零偏、靈敏度、坐標軸不正交及安裝不重合,通常可以建立確定性誤差模型,通過標定方法進行消除。而隨機漂移性誤差長時間工作過程中會隨時間發生變化,對鉆機開孔定位精度也會產生影響,必須對系統中陀螺慣性傳感器中的隨機漂移誤差進行分析與補償,常用的方法為時間序列分析方法。
時間序列是按照時間順序獲取的一系列觀測值,序列觀測值之間具有相互依賴性和隨機性特點[6]。時間序列分析方法就是從時序領域分析數據中存在的規律,對其建模研究,預測走勢或實施控制。本文針對一種集成光纖陀螺傳感器和MEMS陀螺傳感器的鉆機開孔定向儀中的2種慣性器件采集的數據進行時間序列分析,建立了隨機漂移誤差模型,最后采用卡爾曼濾波方式進行最優估計,可以有效降低陀螺信號隨機漂移,提高鉆機開孔的精度。
1 工作原理
本文中煤礦井下鉆機開孔定向儀系統主要包括基于單軸光纖陀螺尋北系統和基于MEMS陀螺的捷聯慣導系統2個重要組成部分。①尋北系統的主要工作原理:系統保持靜止狀態下,在微處理器的控制下旋轉至多個位置,并在每個位置采集單軸光纖陀螺的數據,待完成全部位置采集時,解算出與地理真北方向的方位角。②捷聯慣導系統主要工作原理:將系統置于鉆機導軌上,在運動過程中,系統將此方位角作為初始值,結合MEMS陀螺實時采集的數據進行捷聯慣導解算,得出開孔定向儀的實時姿態角度。當靜止于鉆機導軌上,由于導軌與鉆桿平行,此時開孔定向儀顯示的角度就是鉆機開孔的姿態角度的信息。
本文選用F70L-M型單軸中高精度閉環光纖陀螺和ADIS16475 MEMS慣性測量單元,其陀螺主要性能指標見表1。

表1 2種陀螺傳感器主要性能指標Tab.1 Main performance indicators of two types gyroscope sensor
2 隨機誤差處理
從工作原理可以看出,尋北系統中的光纖陀螺和捷聯慣導中的MEMS慣性測量單元的陀螺精度共同決定系統的精度,必須進行誤差修正。相比較常值漂移誤差,隨機漂移誤差的修正更為復雜。隨機漂移誤差處理流程如圖1所示。主要包括2部分:數據預處理和模式識別及建立。數據預處理主要包括平穩性檢驗、周期性檢驗及正態檢驗;模式識別及建立主要包括模型的識別與估計、實用性檢驗和模型確定。
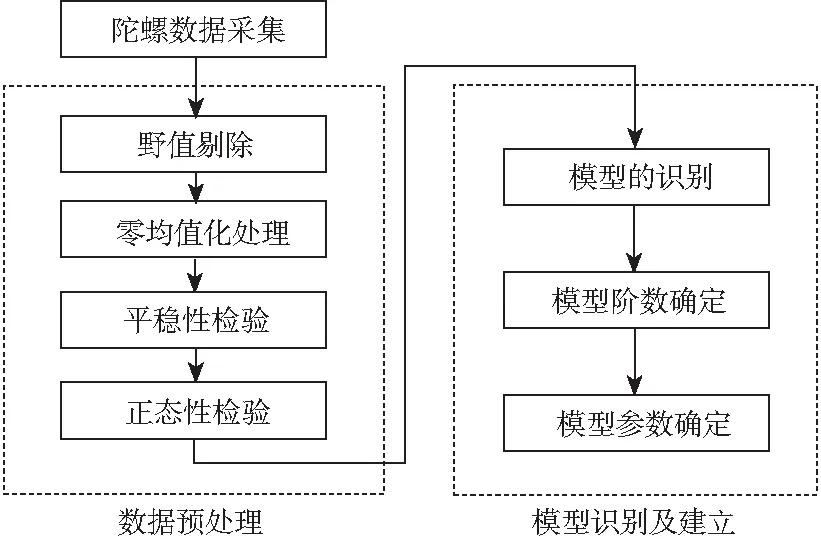
圖1 隨機漂移誤差處理流程Fig.1 Random drift error processing flow
2.1 數據預處理
2.1.1 野值剔除
本文采用工程上廣泛應用的萊依達準則,將超過3倍的標準偏差的誤差從測量數據中剔除,具體步驟如下。
陀螺數據采集的量測值ω1,ω2,…,ωN平均值如下:

(1)
陀螺數據采集的量測值與平均值差值如下:
(2)
式中,i=1,2,…,N。
陀螺數據序列的標準差:
(3)
對采集的陀螺數據進行數據判別,當|ωi|>3δ,則認為該測量的陀螺數據為野值,應剔除。
2.1.2 零均值處理
在靜態數據采集過程中,固定分量和隨機分量是光纖陀螺和MEMS陀螺原始漂移信號中的主要組成。為滿足2種陀螺的時間序列建模要求,就必須對陀螺的數據零均值進行處理,除去信號中的固定分量[7],其主要表達式如下:
z(t)=y(t)-μ0
(4)
式中,y(t)為陀螺采集數據的原序列;μ0為陀螺序列均值;z(t)為陀螺采集數據零均值處理后的序列。
2.1.3 趨勢項處理
經過零均值處理后,系統中光纖陀螺和MEMS陀螺采集的信號中還可能包含緩慢變化的趨勢項,可通過建模予以剔除[8]。陀螺采集的數據的趨勢項可以用多項式的函數d(t)近似表示:
d(t)=a0+a1t1/2+a2t+a3t2+a4t-1/2+a5t-1+a6t-2
(5)
式中,ai(i=1,2,3,4,5,6)為模型系數;t為時間。
為求解趨勢項的模型系數,本文采用最小二乘法,使得函數和離散數據的誤差平方和最小。剔除趨勢項后得到新的序列:
Z′(t)=Z(t)-d(t)
(6)
2.1.4 平穩性檢驗
經過上述處理后,陀螺隨機漂移數據的序列還要經過平穩性檢驗,以判斷陀螺數據是否隨時間變化,只有經過平穩性檢驗,陀螺數據才具有統計的意義。平穩性檢驗的方法較多,包括逆序法檢驗法、特征根檢驗法、游程檢驗法等,本文中采用工程中常見的逆序法檢驗序列平穩性[9],其主要思路是:
(1)將原有陀螺采集的N個數據序列{Z(t)}分為M段,求其每段的平均值。
(2)計算出均值序列中逆序總數S。
(3)逆序總數S的期望值為:
(7)
方差為:
(8)
(4)統計量λ為:
(9)
λ服從標準正態分布,即λ~N(0,1)。當λ<2且顯著性水平為0.05時,陀螺數據序列{Z(t)}為平穩性序列;反之,{Z(t)}為非平穩性序列。
2.1.5 正態性檢驗
時間序列分析必須滿足正態分布的統計特性,檢驗正態分布的方法較多,包括概率值檢驗、χ2擬合優度檢驗、W檢驗與D檢驗以及峰度檢驗和偏度檢驗。本文采用檢驗序列峰度檢驗和偏度檢驗,利用偏態系數ξ(三階距)和峰態系數υ(四階距)來進行判斷。當偏態系數ξ≈0和峰態系數υ≈3,則滿足正態分布的統計特性。偏態系數和峰態系數近似值分別用式(10)和式(11)表示:
(10)

(11)

2.2 誤差模型建立
2.2.1 模型的建立和階次確定
自回歸模型(AR)、滑動平均模型(MA)和自回歸滑動平均模型(ARMA)是時間序列中最重要的3種模型[10]。根據各個時間序列模型的特點,應用平穩時間序列的自相關函數和偏自相關函數的性質,識別平穩時間序列的模型。
平穩時間系列{Z(t)}的自協方差函數為:
(12)

偏相關系數的遞推公式為:
(13)
通過采集F70L-M型光纖陀螺和ADIS16475型MEMS陀螺的數據,計算各自的自相關系數和偏相關系數,如圖2和圖3所示。從圖2和圖3可以看出,2種陀螺的自相關系數和偏相關系數均表現為“拖尾”,故判定模型為ARMA(p,q)模型。
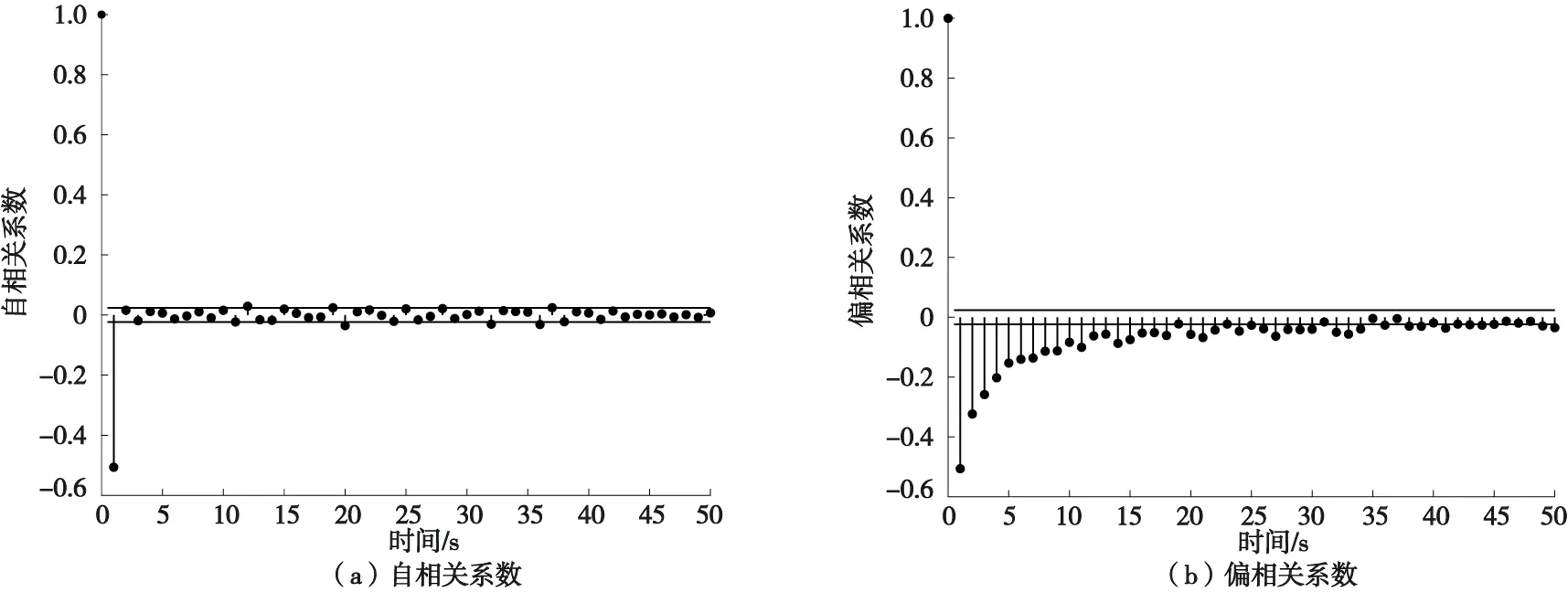
圖2 F70L-M型光纖陀螺的自相關系數與偏相關系數Fig.2 F70l-M fiber-optic gyroscope′s autocorrelation coefficient and partial correlation coefficient
圖3 ADIS16475型MEMS陀螺的自相關系數與偏相關系數Fig.3 ADIS16475 MEMS gyroscope′s autocorrelation coefficient and partial correlation coefficient
2.2.2 模型參數確定
為其確定模型的階數p、q的值,目前常采用的方法是FPE準則、AIC準則和BIC準則[11]。本文中采用AIC準則對模型定階,AIC函數的定義為:
(14)

依次按照低階到高階建立不同模型,并計算各模型的AIC值,當AIC值最小時,其對應的p、q值為模型的階次。
根據判斷條件可知,ARMA(2,1)的AIC值最小,故選擇建立ARMA(2,1)時間序列模型:
xk=φ1xk-1+φ2xk-2+ak-θ1ak-1
(15)
采用最小二乘法原理進行參數估計,可以得到如下方程:
xk=1.234xk-1+3.45xk-2+ak-1.023ak-1
(16)
3 卡爾曼濾波處理
3.1 卡爾曼濾波
卡爾曼(Kalman)濾波是一種線性、無偏、以誤差方差最小為估計準則的最優估計算法。在對隨機誤差建模后,通過卡爾曼濾波進行最優估計,可以有效降低陀螺信號隨機漂移。根據陀螺靜態輸出模型可以得到卡爾曼濾波的狀態變量(17)和觀測方程(21):
X(k)=AX(k-1)+BW(k)
(17)
式中,X(k)為系統狀態;W(k)為過程噪聲、高斯白噪聲;A、B為系統參數。其中系統狀態為:
X(k)=[Y(k),Y(K-1)]T
(18)
系統噪聲為:
W(k)=[a(k)-a(k-1)]T
(19)
根據本文中光纖陀螺隨機誤差建立ARMA(2,1)模型可知:
(20)
系統觀測方程為:
Z(k)=HX(k-1)+V(k)
(21)
式中,Z(k)為時刻的量測值;H為量測系統的參數;V(k)為量測噪聲、高斯白噪聲。
聯立狀態方程和量測方程,運用卡爾曼濾波遞推計算:
(22)

3.2 數據處理結果分析
3.2.1 F70L-M型光纖陀螺數據處理
卡爾曼濾波處理前后的數據如圖4所示,卡爾曼濾波處理前后的Allan方差如圖5所示。
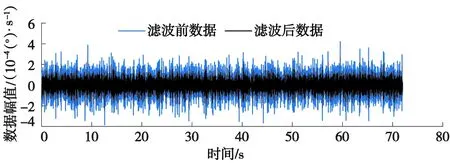
圖4 卡爾曼濾波處理前后F70L-M型光纖陀螺數據Fig.4 F70L-M fiber-optic gyroscope′s data before and after Kalman filter process
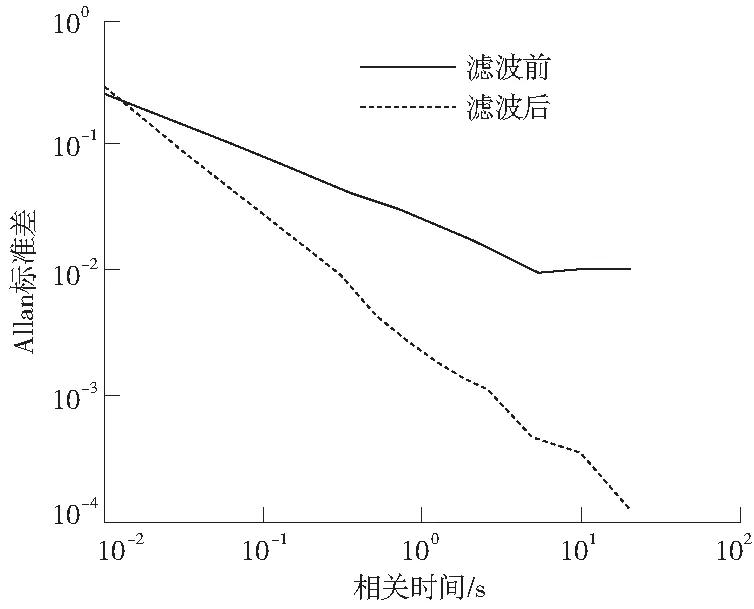
圖5 卡爾曼濾波處理前后F70L-M型光纖陀螺Allan方差Fig.5 F70L-M fiber-optic gyroscope′s Allan variance before and after Kalman filter process
從圖5中可以看出,濾波后光纖陀螺的Allan標準差曲線相比較于濾波前,有了較大幅度的下降,說明卡爾曼濾波提升了數據的穩定性。濾波前后隨機漂移的各項誤差系數見表2。從表2中數據可以看出,卡爾曼濾波器能有效的減少光纖陀螺的隨機漂移,提高測量精度,證明了建立的 ARMA模型的有效性。
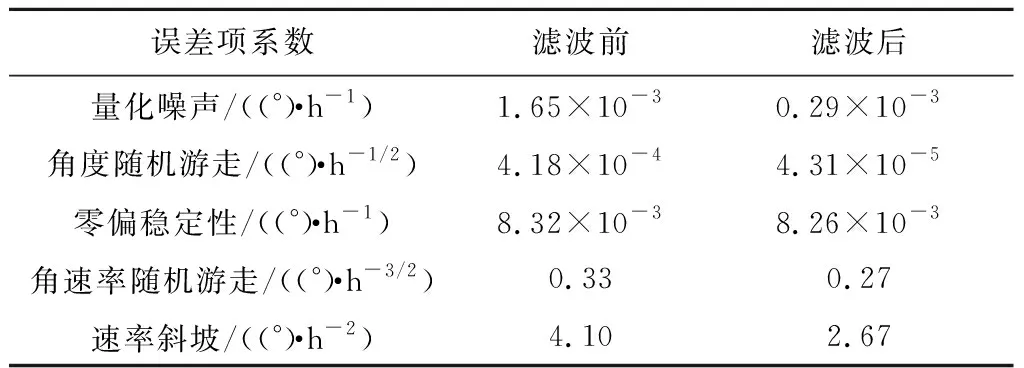
表2 卡爾曼濾波前后F70L-M型光纖陀螺誤差項系數Tab.2 F70L-M fiber-optic gyroscope′s error term coefficients before and after Kalman filter process
3.2.2 ADIS16475型MEMS陀螺數據處理
卡爾曼濾波處理前后的數據如圖6所示,卡爾曼濾波處理前后的Allan方差如圖7所示。
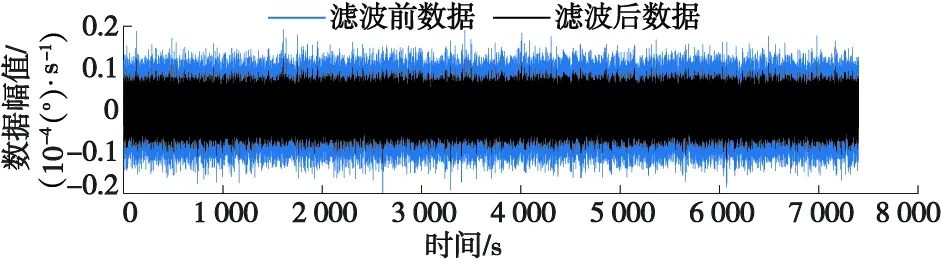
圖6 卡爾曼濾波處理前后ADIS16475型MEMS陀螺數據Fig.6 ADIS16475 MEMS gyroscope′s data before and after Kalman filter process
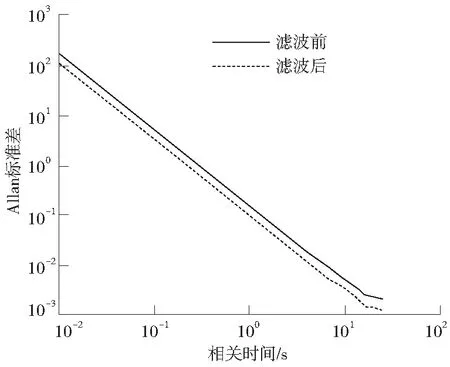
圖7 卡爾曼濾波處理前后ADIS16475型MEMS陀螺Allan方差Fig.7 ADIS16475 MEMS gyroscope′s Allan variance before and after Kalman filter process
從圖7中可以看出,濾波后光纖陀螺的Allan標準差曲線相比較于濾波前,有了較大幅度的下降,說明卡爾曼濾波提升了數據的穩定性。濾波前后隨機漂移的各項誤差系數見表3。
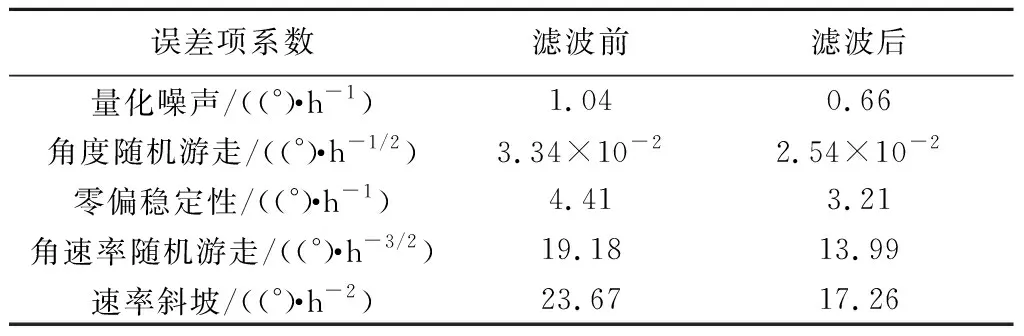
表3 卡爾曼濾波前后ADIS16475型MEMS陀螺誤差項系數Tab.3 ADIS16475 MEMS gyroscope′s error term coefficients before and after Kalman filter process
從表3中可以看出,卡爾曼濾波器能有效地減少光纖陀螺的隨機漂移,提高測量精度,證明了建立的 ARMA模型的有效性。
4 結論
(1)本文提出一種基于單軸高精度光纖陀螺集成MEMS微機電陀螺的新型鉆機開孔定向儀,發揮了單軸光纖陀螺高精度和MEMS微機電陀螺低成本的特點,能夠滿足實際的工程的需要。
(2)針對系統中光纖陀螺和MEMS陀螺建立了隨機漂移誤差的流程,并詳細敘述了陀螺數據預處理的過程,運用時間序列分析法建立了ARMA隨機誤差模型,并確定了模型的參數。
(3)針對建立的隨機誤差模型,采用卡爾曼濾波算法對光纖陀螺和MEMS陀螺信號進行濾波處理,采用Allan方差分析方法對濾波后的陀螺數據進行分析。分析結果表明,光纖陀螺和MEMS陀螺的隨機漂移誤差明顯減小,精度得到有效提高。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
電源技術(2016年9期)2016-02-27 09:05:39
核科學與工程(2015年4期)2015-09-26 11:59:03
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
