“海翼號”水下滑翔機鹽度數據的熱滯后效應偏差訂正方法探討
2022-02-22 08:30:38楊得厚靖春生
應用海洋學學報 2022年1期
關鍵詞:方法
楊得厚,靖春生,黃 獎
(自然資源部第三海洋研究所,福建 廈門 361005)
水下滑翔機是一種新型的海洋環境水下觀測平臺,相比于傳統的海上觀測儀器,比如船載溫鹽深測量儀(Instrument for Measuring Conductivity Temperature and Depth, CTD)等,能夠依靠其較強的續航能力進行長時間、大范圍、全天候、高分辨率的水下自主觀測。目前,水下滑翔機已經逐漸成為一種海洋觀測的重要工具[1]。水下滑翔機的概念,最早是由Stommel在1989年提出的[2],兩年后,世界上最早的水下滑翔機Slocum問世[3],之后,更大觀測深度的Spray水下滑翔機[4]和更加高效節能的Seaglider水下滑翔機也研制了出來[5]。相比較于國外,我國對水下滑翔機的研究起步較晚。2003年,中國科學院組織開展了對水下滑翔機的研究,2005年,天津大學研制的水下滑翔機成功進行水下的測試[6],2008年,我國成功研制出具有自主知識產權的水下滑翔機工程樣機。2009年,天津大學研制了工作深度為500 m的水下滑翔機Petrel,并進行了湖試,并在2014年使用Petrel-Ⅱ水下滑翔機在南海進行測試,圓滿地完成了海上試驗[7]。同年,中國科學院沈陽自動化研究所研制的“海翼號”水下滑翔機先后完成了3次海上試驗,滑翔機海上累計工作天數達到80 d,累計航程達到2 400多千米,累計觀測剖面數超過600個[8]。各個單位研制的水下滑翔機經過多次的海洋觀測試驗,驗證了我國所研制的水下滑翔機的可靠性與穩定性,為后期的推廣與使用打下了堅實的基礎。
本次研究的水下滑翔機為“海翼號”水下滑翔機,配備的是美國海鳥公司生產的滑翔機機載CTD(Glider Payload CTD,簡稱GPCTD),它能夠直接觀測海水的電導率、溫度和壓強,進而可計算出鹽度等數據。水下滑翔機在水下工作過程中,由于溫度傳感器位于電導單元的外部,GPCTD的電導率觀測滯后于溫度觀測,且由于電導率電池會儲存熱量,電導傳感器需要消耗時間來適應周圍海水,使電導傳感器的反應變慢,從而使鹽度的觀測產生熱滯后效應,特別是在水下滑翔機穿越溫躍層(溫度變化大)時,熱滯后效應尤為明顯。
熱滯后效應導致的鹽度偏差已經被廣大學者所研究。Lueck 和Picklo在1990年首次提出了一種熱滯后修正的數值算法,并用SBE(Sea-Bird Electronics Inc.)的電導單元采集的數據進行試驗,得出了該算法可以有效地減少鹽度的偏差[9-10]。后來,隨著水下滑翔機的問世,熱滯后效應的研究重點也轉到了水下滑翔機上來。Morison等(1994)提出一種能夠確定熱滯后修正振幅α和時間常數τ的方法,通過最小化下降和上升兩個剖面T-S曲線之間的差異,根據SBE-9CTD數據得到的經驗結果,得出α和τ的函數關系,提高了鹽度熱滯后效應訂正的準確度[11]。Garau等(2011)以Morison 等的工作為基礎,提出了不帶泵的Slocum CTD 數據的熱滯后修正方法,該方法優點如下:使用水下滑翔機自身的可變速度,同時不需要參考剖面,通過最小化CTD 下降和上升兩個剖面T-S曲線圍成的面積所確定的目標函數,從而確定修正參數并進行鹽度訂正[12]。該方法由于訂正結果較好,已經被廣大學者所認可,但該方法存在局限性,在鋒面區或者水體變化較為劇烈的海域,下降和上升剖面溫鹽性質不同,由于不采用參考CTD的情況,用該方法進行鹽度訂正可能會出現錯誤,因此該方法僅適用于小范圍且溫鹽性質較為穩定的區域。Troupin等(2015)提供了一套完整的可自由使用的SOCIB Glider工具箱,這個工具箱具有處理滑翔機數據的功能,包括鹽度的熱滯后訂正(針對帶泵的和不帶泵的水下滑翔機)、數據的質量控制和圖形輸出,使得滑翔機的數據處理變得自動化[13]。Alvarez等(2013)使用不同的鹽度訂正方法,在Slocum水下滑翔機帶泵和不帶泵的兩種情況下,設置滑翔機下放角度不同時,比對不同方法對采集的鹽度數據產生熱滯后效應的訂正結果,得出了帶泵的Slocum水下滑翔機相對于不帶泵的鹽度的熱滯后效應的訂正結果更好[14],但該研究在做對比時,缺少船載CTD等可靠的數據進行比較,因此對比結果的可靠性缺少客觀依據。
1 數據特征及處理方法
1.1 數據特征
本研究使用的是“海翼號”水下滑翔機,配備了GPCTD,采樣時間間隔設置為6 s,設置的下潛深度有500 m和1 000 m,其技術參數見表1。圖1為選取的3臺水下滑翔機(JP01、JP02與KP03)在船載911型溫鹽深測量儀(SBE-911 Plus-CTD,技術參數見表1)站位附近(滑翔機各個剖面與CTD站位的信息見表2)觀測的6個剖面之間的鹽度偏差和溫度梯度的關系圖,可以發現,3臺水下滑翔機在運行過程中,6個剖面溫度梯度隨水深的變化趨勢一致,基本呈現單峰分布,在水深0~200 m范圍內達到最大峰值,最大的溫度梯度接近0.6 ℃/m[圖1(b)];3臺水下滑翔機的鹽度偏差與溫度梯度隨水深變化的趨勢一致,在0~200 m水深范圍內,鹽度偏差達到最大[圖1(a)],說明溫躍層越強,熱滯后效應越顯著。在同一個水團范圍內,當滑翔機下降(上升)穿越溫躍層時,鹽度的測量值會偏大(小),3臺水下滑翔機下降和上升剖面測得的溫度隨著水深的變化趨勢幾乎一致,而下降剖面測得的鹽度值大,特別是在溫躍層較強的水層范圍內,這個偏差更明顯(圖2),表明滑翔機在水下觀測過程中,下降和上升剖面存在因熱滯后效應產生的鹽度偏差。

表1 GPCTD、 SBE-911 Plus-CTD系統技術指標Tab.1 Technical specifications of GPCTD and SBE-911 Plus-CTD

續表
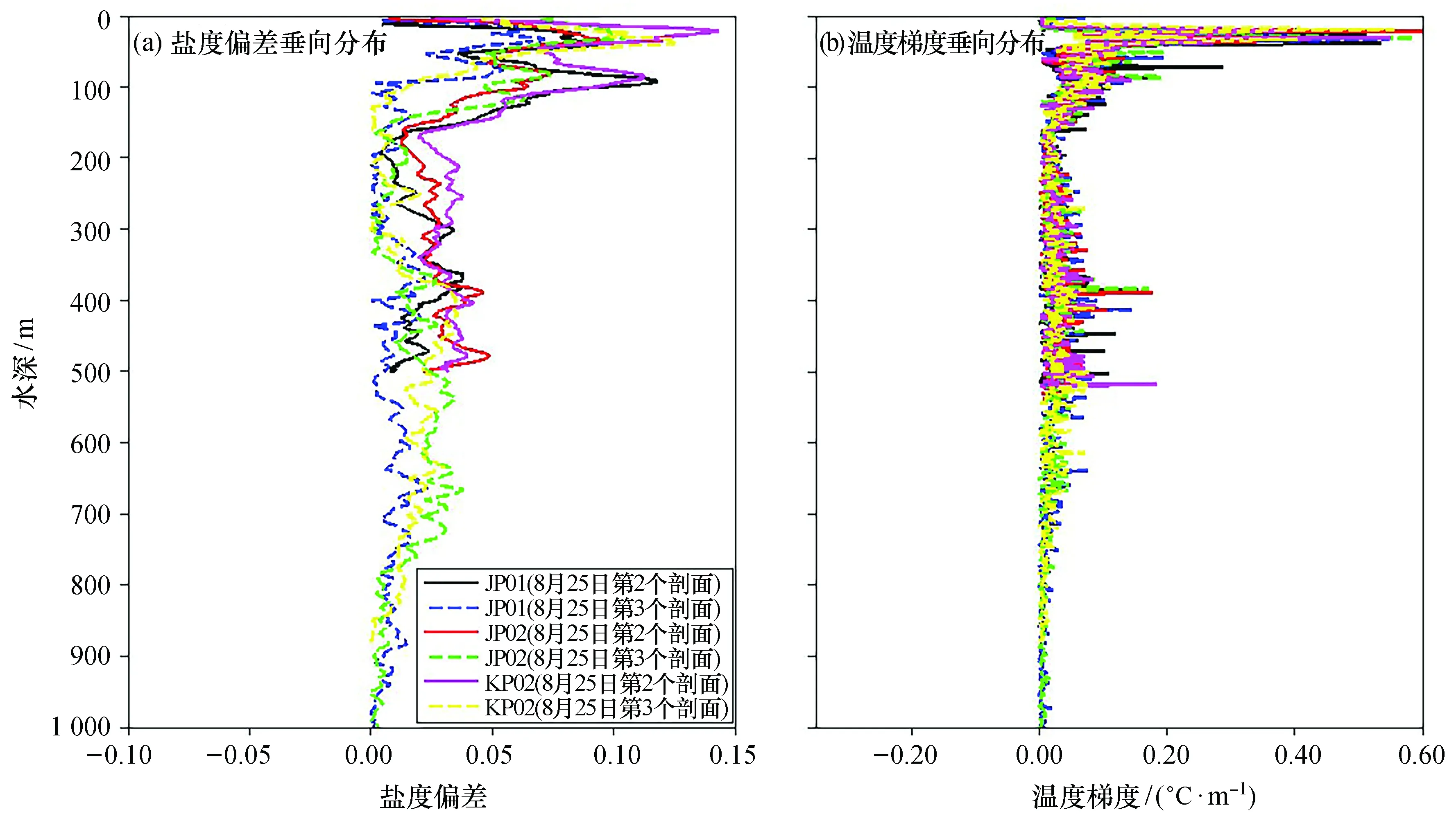
圖1 上升和下降剖面鹽度偏差和溫度梯度的垂向分布Fig. 1 Vertical distribution of salinity deviation and temperature gradient in upper and lower profiles
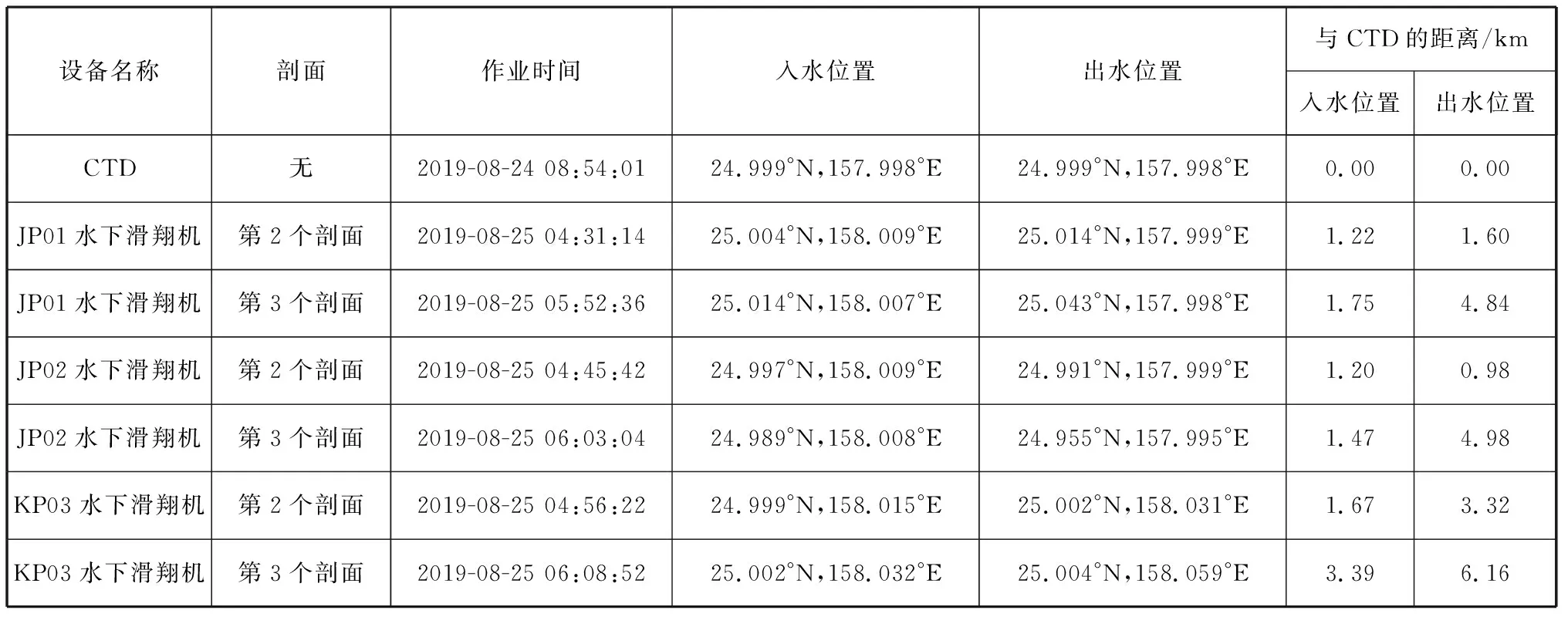
表2 滑翔機各個剖面與CTD站位的時間和位置信息Tab. 2 Simpling times and positions of the gilder and CTD profiles
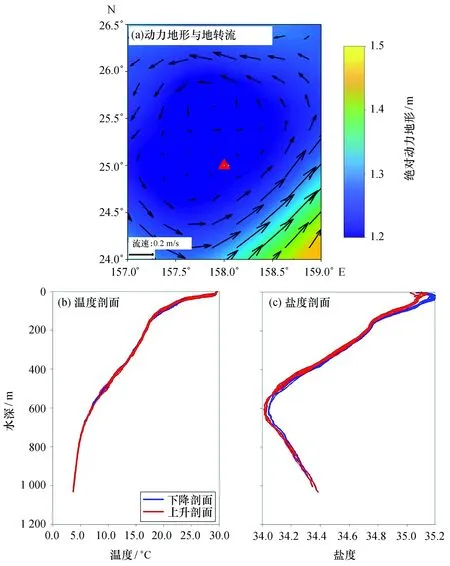
圖2 CTD參考站位附近3臺水下滑翔機觀測的下降和上升剖面Fig. 2 Upcast and downcast temperature and salinity profiles of 3 gliders around a CTD station(a)中箭頭為地轉流流速,紅色三角形代表CTD站位位置,黃色線段代表待訂正的滑翔機剖面位置。
1.2 數據的預處理
檢查水下滑翔機電導率是否存在異常值,將電導率0~6 S/m以外的值剔除;檢查壓力值是否正常,海洋中所有的壓力值都應該是大于0 dbar,所以將壓力值小于或者等于0 dbar的數據剔除;將溫度在-2.5~40 ℃范圍以外的數據剔除。
1.3 鹽度的熱滯后訂正
目前,經典的修正鹽度熱滯后效應的方法有兩種,一種是計算溫度傳感器附近的實際電導率[9],第二種是計算電導池中的實際溫度[11]。第一種方法計算公式[9]如下:
CT(n)=-b·CT(n-1)+γ·a×[T(n)-T(n-1)]
(1)
式(1)中:CT為溫度傳感器附近的實際電導率(S/m),T是溫度(℃),n是采樣的計量數目,γ是電導率對溫度的靈敏度,這個數值由儀器生產商評估并提供。系數a和b由下式得到:
(2)
(3)
式(2)、(3)中,fn是不同CTD傳感器的奈奎斯特頻率(單位為Hz,CTD傳感器的采樣頻率為采樣周期的倒數,奈奎斯特頻率為CTD傳感器的采樣頻率的一半),α是修正振幅,τ是時間常數。
第二種方法計算公式[11]如下:
TT(n)=-b·TT(n-1)+a×[TT(n)-TT(n-1)]
(4)
式(4)中:TT為電導池中的實際溫度(℃),系數a和b的計算方法如式(2)和(3)。
本報訊 根據湖北三寧化工股份有限公司大修計劃節點,11月18日上午9:00尿素廠正式進入大修模式,1#系統停車,12:30置換完成,凈化車間1#系統置換較以往不同的是將羅茨機開著置換,這樣做旨在節約時間。19日凌晨3:002#系統停車,管理人員全體就位,到現場協調指揮,8:30完成置換,順利停車,各項檢修工作有序進行。
方法二比方法一更有優點,因為它不依賴于估計的靈敏度γ,所以它在計算上更準確,因此,本研究的鹽度訂正方法采用第二種方法。
式(2)、(3)中修正振幅α和時間常數τ都取決于通過電導單元的流速。標準參數α和τ的確定又分為3種主要的方法,在本研究中分別稱為方法A、方法B和方法C。
方法A:熱滯后訂正過程中,修正振幅α和時間常數τ取決于每個剖面所測得的鹽度關于真實值(船載CTD測量的鹽度)的均方根誤差(RMSE)的最小值[14]。
方法B:Garau等(2011)對水下滑翔機提出了將水流速度考慮在內的修正方法[12],α和τ計算公式如下:
α(n)=αo+αs·Vf(n)-1
(5)
τ(n)=τo+τs·Vf(n)-1/2
(6)
式(5)、(6)中:Vf為水流速度(cm/s),下標o和s分別代表偏移(Offsets)和斜率(Slopes),n是采樣的計量數目。偏移值αo、τo和斜率值αs、τs通過優化目標方程,使得滑翔機下降和上升兩個剖面鹽度曲線之間面積最小化[12],Troupin等(2015)在此基礎上,對參數的確定進行修正,補充了滑翔機帶泵的CTD鹽度修正的方法,創建了一套MATLAB滑翔機數據處理工具箱,這里使用了MATLAB水下滑翔機熱滯后訂正的代碼(https://github.com/socib/glider_toolbox)[13]。
方法C:Lueck(1990)[9]的理論由 Morison等(2011)[11]進一步驗證, 并根據經驗結果, 得到計算α和τ的公式如下:
(7)
(8)
式(7)、(8)中:V是滑翔機下降或上升的速度(m/s)。
2 結果與討論
2.1 系統偏差的訂正
2019年8月25日在中北太平洋一個CTD大面站,將3臺水下滑翔機與船測CTD進行比測,選取與CTD站觀測時間和空間均較臨近的6個剖面(每臺水下滑翔機選取2個下降和2個上升剖面),分別采用3種不同的鹽度訂正方法進行訂正。圖3為選取的水下滑翔機剖面所觀測的溫度、鹽度和船載CTD觀測的溫度、鹽度對比圖,兩者的溫鹽性質較為接近,具有相同的垂向結構,因此可以認為滑翔機在該位置和CTD大面站的水體特性較為一致。但是滑翔機觀測的鹽度與船載CTD觀測的鹽度在相同水層溫度基本一致的情況下存在一定的偏差,總體上水下滑翔機測得的鹽度比船載CTD測得的鹽度偏小,尤其在溫鹽性質較為穩定的1 000 m水層仍然存在偏差。由此可見,滑翔機觀測的鹽度存在系統偏差,因此,對滑翔機觀測的鹽度進行系統偏差修正(每臺滑翔機觀測的所有鹽度剖面去除掉每臺滑翔機在800~1 000 m水深范圍內觀測的所有鹽度剖面與CTD的偏差平均值)。
圖3 系統偏差訂正之前的水下滑翔機觀測的溫度、鹽度與CTD站位的對比Fig. 3 Comparison of temperature and salinity profiles measured by glider and CTD before the system deviation corrected
2.2 鹽度訂正方法的對比
圖4為3臺水下滑翔機剖面所觀測的鹽度經系統偏差修正后與船載CTD的對比圖,可以發現,3臺水下滑翔機剖面所觀測的鹽度經系統偏差修正后和船載CTD觀測的鹽度總體上保持一致,在溫鹽性質較為穩定的1 000 m水層也保持了一致,但是在200 m以淺的躍層較強的水層內,滑翔機觀測的溫度在和CTD觀測的溫度一致的情況下,仍然存在鹽度的偏差。因此,在修正系統偏差后,將對選取的剖面進行鹽度的訂正。
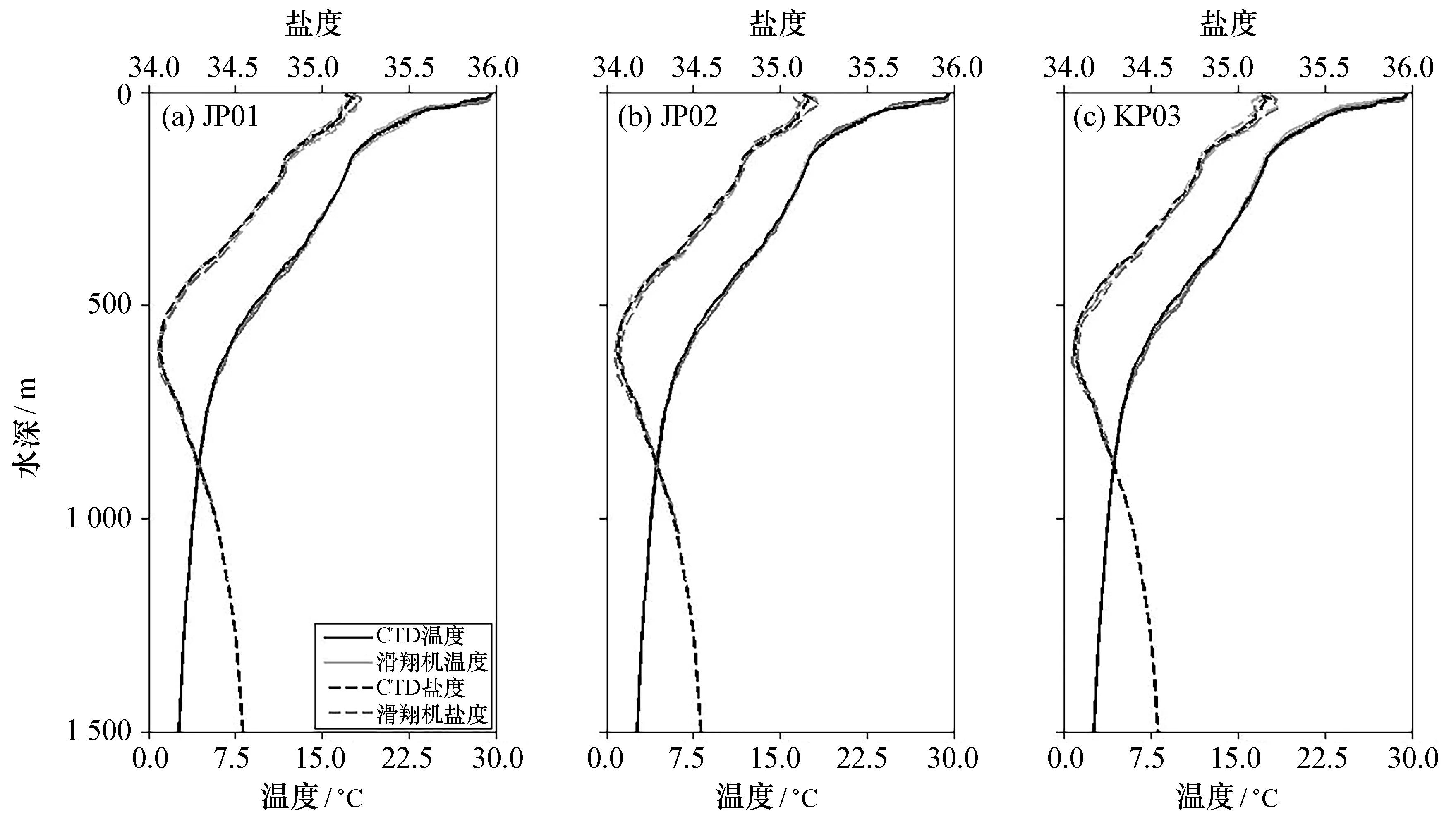
圖4 系統偏差訂正之后的水下滑翔機觀測的溫度、鹽度與CTD站位的對比Fig. 4 Comparison of temperature and salinity profiles measured by glider and CTD after the system deviation corrected
在使用上述方法二來進行鹽度訂正的前提下,分別采用上述A、B和C不同方法確定標準參數α和τ。由于鹽度因熱滯后效應引起的偏差主要出現在上層200 m以淺的范圍內,因此為了更直觀地表達訂正方法的效果,僅選取200 m以淺的部分作圖分析。以KP03水下滑翔機 8月25日第3個剖面為例。
從圖5看出,3種方法對滑翔機鹽度的熱滯后訂正均有一定的效果,訂正結果大體上保持了鹽度的變化趨勢,但是使用方法A時,對比方法B和C,下降和上升剖面之間的鹽度偏差還是較大。方法C在訂正該剖面時,下降和上升剖面之間的鹽度偏差訂正地較為接近,但該方法不穩定,并非每個剖面都達到相同的效果[圖5(d)]。表3統計了選取的6個滑翔機原始鹽度剖面使用3種方法訂正前后下降和上升剖面之間的平均鹽度偏差,由表3可以看出,在鹽度偏差最大的0~<100 m水深范圍內,方法B使得下降和上升剖面之間的鹽度偏差從0.054 4降低到0.016 3,優于另外兩種方法,在其他不同水深范圍內,同樣如此。
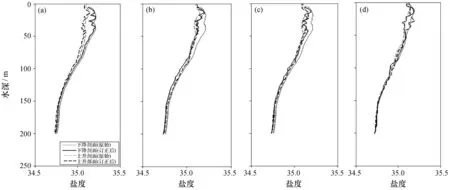
圖5 3種不同的鹽度訂正方法對滑翔機鹽度訂正的結果Fig. 5 Corrected salinity results from glider measurement by three different correction methods(a)、(b)、(c)分別為使用方法A、B、C對KP03水下滑翔機8月25日第3個剖面訂正前后滑翔機上下剖面的偏差情況,(d)為使用方法C對JP01水下滑翔機8月25日第3個剖面訂正前后滑翔機上下剖面的偏差情況。
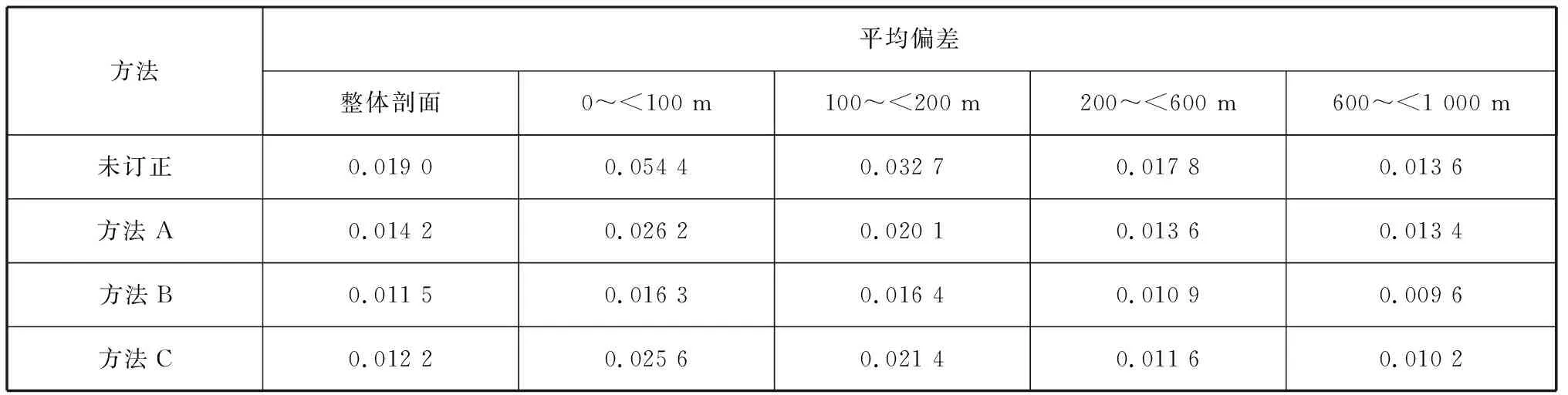
表3 滑翔機原始鹽度剖面使用不同方法訂正前后下降和上升剖面之間的平均鹽度偏差Tab. 3 Deviation of average salinity between downcast and upcast profiles with different correction methods
以KP03水下滑翔機 8月25日第3個剖面為例,圖6為使用鹽度的3種訂正方法得到的滑翔機下降和上升剖面鹽度與船載CTD對比圖。從圖6可以看出,3種方法對滑翔機鹽度的熱滯后訂正均有一定的效果,訂正結果大體上保持了鹽度原始的變化趨勢,但方法B的訂正結果曲線與船載CTD參考剖面更接近。表4統計了選取的6個滑翔機原始鹽度剖面使用3種方法訂正前后相對于船載CTD的平均鹽度偏差,相對于其他水深范圍來講,滑翔機下降和上升鹽度剖面相對于船載CTD的偏差最大值發生在0~<100 m水深范圍內。由表4看出,6個剖面使用方法B的訂正方法對下降或者上升鹽度剖面各個水深范圍的平均訂正效果均優于方法A和C,在鹽度偏差最大的0~<100 m水深范圍內,對于下降剖面,6個剖面使用方法B的訂正,平均偏差從0.040 0降低到0.017 0,能夠減少0.023 0的鹽度偏差,對于上升剖面,平均偏差從0.033 0降低到0.012 0,能夠減少0.021 0的鹽度偏差,極大地降低了下降和上升剖面之間的鹽度偏差。因此,相比較于方法A和方法C,方法B對于滑翔機下降和上升鹽度剖面之間的偏差訂正效果更好,與船載CTD的鹽度剖面的分布更吻合接近。
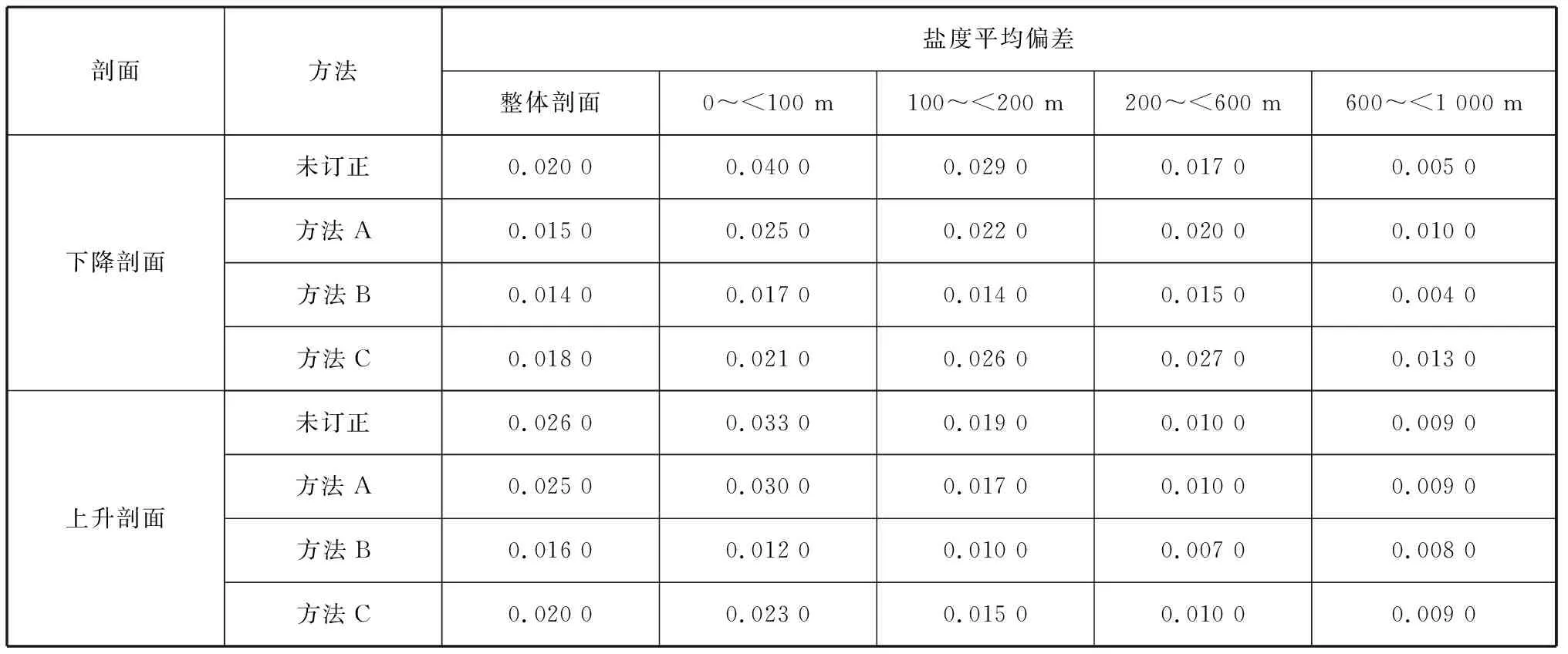
表4 滑翔機原始鹽度剖面與經鹽度訂正后的剖面相對于船載CTD的鹽度剖面的平均偏差Tab. 4 Mean deviations between the glider original and corrected salinity profiles and shipborne CTD profile
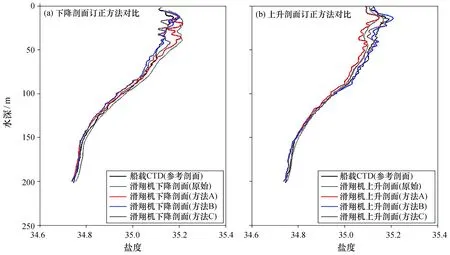
圖6 3種不同的鹽度訂正方法結果與船載CTD的比較Fig. 6 Comparison of the corrected salinity profiles from glider by three different methods and the salinity profile from shipborne CTD
圖7為經過3種鹽度的訂正方法處理前后,下降和上升剖面T-S曲線(0~200 m)。由圖可見,方法A的訂正效果并不理想,下降和上升剖面T-S曲線的偏差并沒有很好地減少,有時反而比訂正前的剖面偏差更大。方法C在某些剖面上,有較好地減少了下降和上升剖面T-S曲線的偏差[圖7(c)、圖7(e)和圖7(f)],但在其他剖面上,減少的效果并不理想,所以訂正的效果并不穩定。相對于方法A和C,方法B的訂正使得下降和上升剖面T-S曲線之間的偏差大大降低,下降和上升剖面的T-S曲線比起未經訂正的更加趨向于一致,更加符合同屬一個水團的特征,且方法B的訂正效果較為穩定。通過最小化滑翔機連續上下剖面的面積可以顯著地降低熱滯后效應引起的鹽度剖面偏差,早之前,在沒有船載CTD參考的情況下,這種方法就已經成功應用于西地中海執行的滑翔機任務上[15],本研究以此方法來驗證訂正方法的可靠性。
通過對比了3種訂正方法對下降和上升剖面之間鹽度偏差大小的減少程度、對與船載CTD鹽度剖面偏差大小的減少程度和使得下降和上升剖面T-S曲線的一致程度,得出了經鹽度的熱滯后訂正方法B訂正后的鹽度剖面,相對于另外兩種方法,不管是下降和上升剖面之間偏差的減少效果,還是與船載CTD參考鹽度剖面偏差的減少效果,又或者是下降和上升剖面T-S曲線的一致程度,方法B都明顯優于另外兩種方法。綜上所述,可以得出鹽度的熱滯后訂正方法B效果相比于另外兩種方法要準確可靠。
3 結論
本研究首先分析了“海翼號”水下滑翔機的數據特征,發現在水下滑翔機觀測過程中,鹽度的觀測存在熱滯后效應,特別是在200 m以淺溫度梯度較強的溫躍層范圍。因此,在對“海翼號”水下滑翔機數據進行預處理后,以時空相近的CTD站位數據為參考剖面,消除了滑翔機剖面鹽度的系統偏差后,在采用計算電導池中的實際溫度的方法為前提下,選取3種不同方法確定標準參數α和τ的訂正方法來進行鹽度訂正效果的比較,并得出了以下結果。
(1)對比3種不同方法對滑翔機鹽度訂正前后下降和上升剖面偏差的減少程度。方法B對所選取的6個剖面在全剖面和不同水深范圍內,下降和上升剖面偏差的減少程度均優于另外兩種方法,且訂正效果也較為穩定。
(2)對比訂正后的剖面與船載CTD觀測剖面的偏差大小。方法B對所選取的6個剖面在全剖面和不同水深范圍內,下降和上升剖面偏差的減少程度均優于另外兩種方法,且方法B的訂正結果曲線與船載CTD參考剖面更接近。
(3)對比3種不同方法對滑翔機鹽度剖面訂正后,下降和上升剖面T-S曲線的一致程度。相對于方法A和C,方法B的訂正使得下降和上升剖面的T-S曲線比起未經訂正的更加趨向于一致,且方法B的訂正效果也較為穩定。
以上結果表明:方法B為水下滑翔機鹽度訂正的最優方法,即在訂正電導池中實際溫度的前提下,使用計算機圖形分割方法,最小化GPCTD下降和上升兩個剖面T-S曲線圍成的面積所確定的目標函數,來確定合適的熱滯后修正振幅α和時間常數τ,從而消除下降和上升剖面之間的鹽度偏差。該方法得出的鹽度較好地訂正了鹽度的熱滯后效應,并且使得滑翔機下降和上升剖面T-S曲線變化趨向一致,保持了下降和上升剖面同屬一個水團、具有相同的溫鹽性質的特征。
由于比測資料有限,本研究僅采用了1次船載CTD的觀測結果與3臺水下滑翔機的6個剖面觀測結果進行對比分析,存在一定的局限性,但其結果在一定程度上示出了3種不同訂正方法的優劣,具有一定的參考價值。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
