云控場景下車輛隊列的模型預測控制方法*
2022-03-01 06:38:42張天雷李德毅
汽車工程 2022年2期
趙 菲,王 建,張天雷,,王 里,李德毅,3
(1. 北京航空航天大學交通科學與工程學院,北京 100191;2. 北京主線科技有限公司,北京 100191;3. 中國工程院,北京 100088)
前言
由于具備提高交通安全水平、增強道路通行能力、節能減排等優點,車輛隊列運行受到廣泛關注,通過引入車車(V2V)通信,控制方法從基于單車感知能力的自適應巡航控制(adaptive cruise control,ACC)發展成為協同式自適應巡航控制(cooperative ACC,CACC),而具體的控制算法既有簡單適用的PID,也有較為復雜的模型預測控制(model predictive control,MPC)。
與其他隊列控制方法相比,MPC 具有多目標優化能力和控制精度高等優點,成為隊列研究的一個熱點方向。集中式MPC具有信息全面、優化能力強的特點;而出于提高靈活性和減輕單車計算壓力等原因,現有的MPC 以分布式應用為主,相關研究已經比較深入。隨著隊列應用中車輛動力學模型復雜程度增加以及優化目標的不斷增多,基于MPC的非線性控制和多目標優化問題將極大地增加控制算法的計算量,導致單車算力捉襟見肘。另外,只針對單車局域指標進行優化的分布式控制算法,缺乏對隊列整體指標進行優化的能力,也更加缺少以路網交通效率、區域運行時間、區域隊列燃油經濟性進行優化的能力。
近年來,高性能通信技術和云計算技術的出現有力推動了智能網聯汽車的創新發展。以5G 通信、智能路側設施、智能車輛、云平臺等為基礎形成的云控系統通過協同感知、決策和控制的車路云一體化技術可以實現全域智能車輛運行性能優化和智能交通系統性能的提升,相關技術也得到了初步驗證,同時也出現了針對云控場景通信可靠性問題進行車輛控制器設計的研究。
實際上,基于云平臺的隊列控制已經逐漸受到關注。文獻[12]中借助邊緣云進行隊列運行的輔助聯合優化以增強隊列的安全性;文獻[13]中采用邊緣云的全局信息來加強車輛隊列的控制能力。更進一步,文獻[14]和文獻[15]中提出了采用邊緣云技術進行集中式隊列控制,給出了基于邊緣云進行隊列控制的優勢,并進行了可行性方面的初步研究,但尚未采用MPC控制算法。
目前看來,在云控場景下,可以通過車路云的融合技術提高隊列控制的全局性和預見性,從而使隊列運行控制具備全局優化能力,并將對算力要求較高的非線性多目標優化MPC 算法卸載到高算力低時延的邊緣云。利用云平臺進行集中式的隊列多目標優化求解,可以減輕單車的計算負擔、更好地發揮MPC的優化控制能力。
雖然邊緣云可以具有極低的通信時延,理想情況下能達到20 ms,但在實際應用中,出于成本和部署維護的考慮,邊緣云的通信時延往往會增大。另外由于網絡負荷、無線環境和有線路由的原因會造成時延的抖動。邊緣云的時延可以看作是在一個固定時延上疊加一個時延抖動形成的可變時延。這種車云之間的可變時延將會影響隊列控制的穩定性。一些學者研究了網絡集中式控制方法中時延對控制穩定性的影響,一些學者研究了V2V 時延對車輛隊列系統穩定性的影響。但這些研究并未從云平臺中心化集中控制的應用角度面向隊列穩定性及其他控制性指標進行具體分析。
為此,本文中提出了一種將基于MPC 的隊列控制算法部署于邊緣云的隊列運行控制方案,并分析車云間時延對隊列控制的影響。首先,以非線性車輛動力學為基礎建立隊列狀態空間方程;接著,結合模型預測控制的滾動時域優化特點,設計了一種適用于隊列模型預測控制的可變時延補償方法;然后,根據李雅普諾夫穩定性原理,證明所提出的集中式模型預測控制算法存在可行解并具有漸近穩定性;進一步,以云控式貨車隊列運行為例,通過基于TruckSim 與Simulink 的聯合仿真實驗,驗證了考慮車-云通信時延的隊列集中式MPC 算法的串穩定性;最后,通過仿真實驗,分析了不同時延下的隊列控制性能指標,并給出了保證隊列穩定所能承受的最大時延值。
1 隊列模型的建立
1.1 車輛隊列問題描述
云控場景下信息流拓撲結構如圖1 所示,考慮車輛節點數量為的車輛隊列。車輛均裝配狀態傳感器可由通信模塊將車輛狀態上傳至位于邊緣云的中央控制器,經過云控平臺的優化計算后的控制指令再傳回至編隊各車節點。車輛編隊的目標在于保持穩定車距。在隊列控制環節,本文采用集中式控制,云端控制器接收車輛節點的駕駛狀態,即車輛位置p和速度v作為輸入量,根據期望加速度求解發動機轉矩T,并考慮節點與云控平臺的通信環節時延為τ。
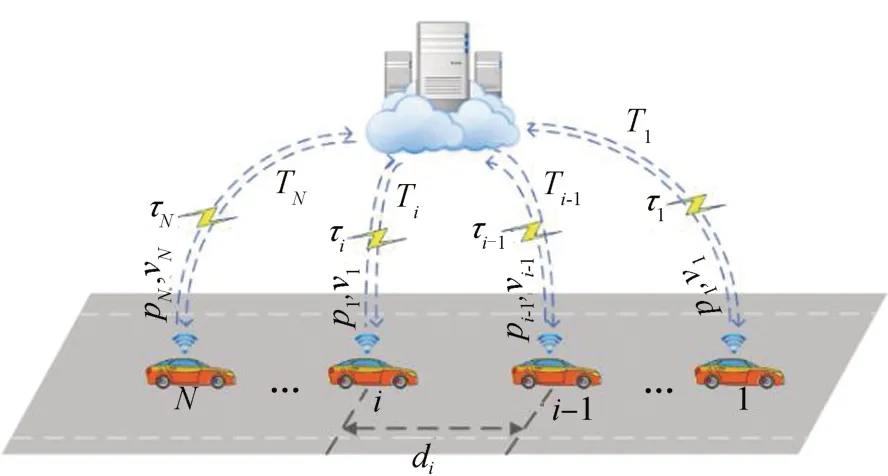
圖1 車路信息流拓撲結構
為進一步描述多車隊列跟蹤問題,作出以下假設:隊列各車輛只考慮縱向動力學控制,假設橫向控制良好;車輛裝備傳感器感知當前車輛狀態,不考慮傳感器測量誤差;車輛裝備通信單元實現車載端和控制云端互聯;車輛端的傳感器和執行器與云控中心的控制器時鐘同步,且通信數據包含發送時間戳。
1.2 車輛動力學模型
考慮車輛的動力學特性,如圖2所示。
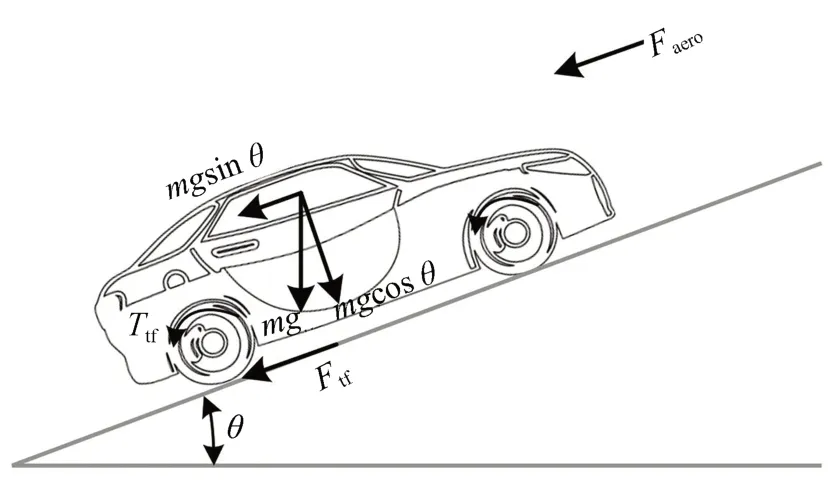
圖2 車輛動力學
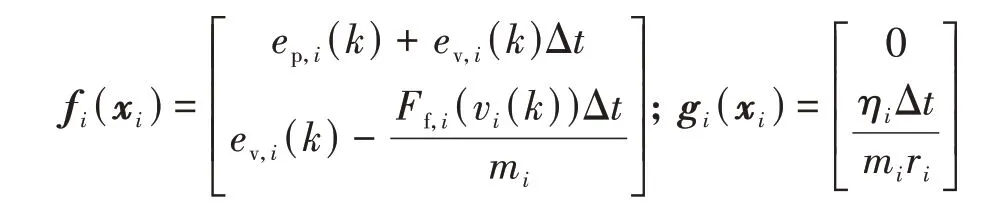
每個車輛節點的動力學模型可表示為
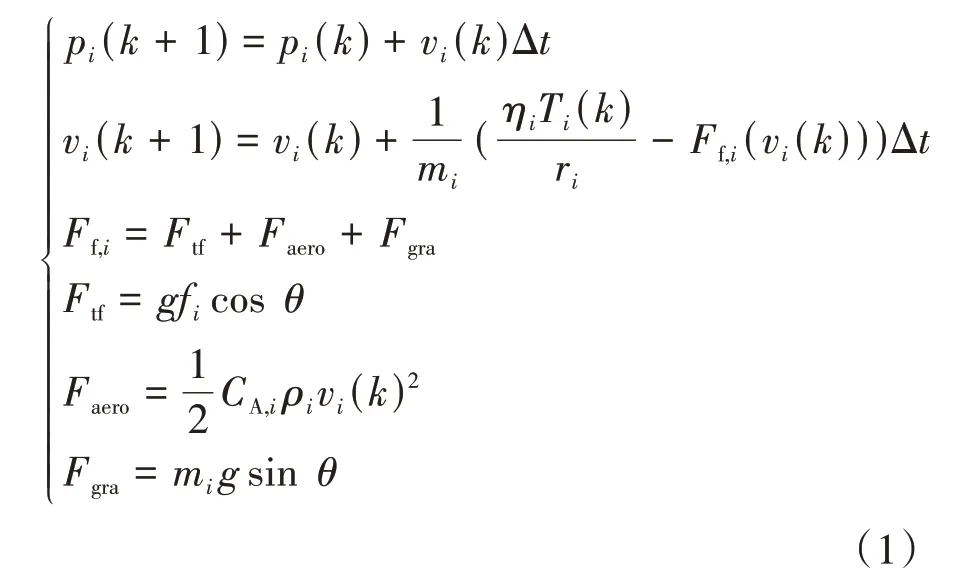
式中:p()和v()分別為車輛的位置和速度;Δ為采樣時間;為離散時刻表示;m為車質量;r為輪胎半徑;發動機轉矩T轉化為車輪驅動力矩的機械傳動效率為η;行駛阻力(v())為滾動阻力、空氣阻力和坡度阻力之和;f為滾動阻力系數;為空氣阻力系數;ρ為空氣密度。
為保證道路通行效率,本文中采用固定車頭時距策略實現隊列跟車行駛。

式中:為相鄰車輛- 1和的目標車距;靜態跟車距離為;車頭時距為;車輛速度為v()。
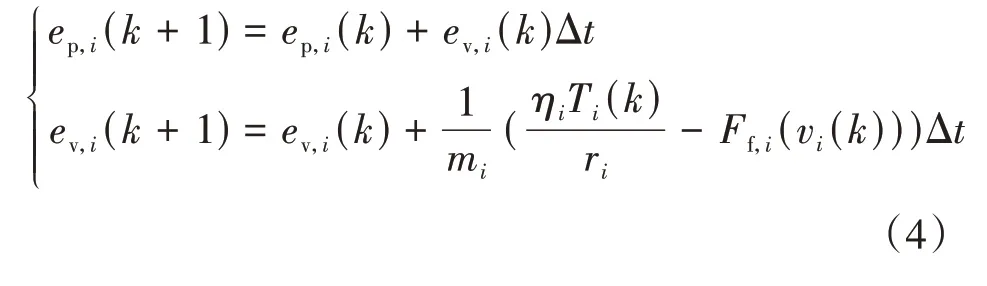
基于現有車輛狀態模型和目標車距,可定義車輛跟蹤狀態誤差為

式中()和()分別為頭車的位置和速度,同時結合目標車距作為系統的參考輸入狀態。則進一步離散誤差狀態方程可表示為
考慮到車輛的物理執行器飽和極限,車輛速度與加速度存在約束,定義速度量和加速度的狀態硬約束為

式中:、為車輛最小速度和加速度;、為車輛最大速度和加速度限制。
為避免前車-后車碰撞事故,相鄰車輛節點直接存在最小車距避撞約束,定義耦合安全約束為

2 集中式模型預測控制器設計
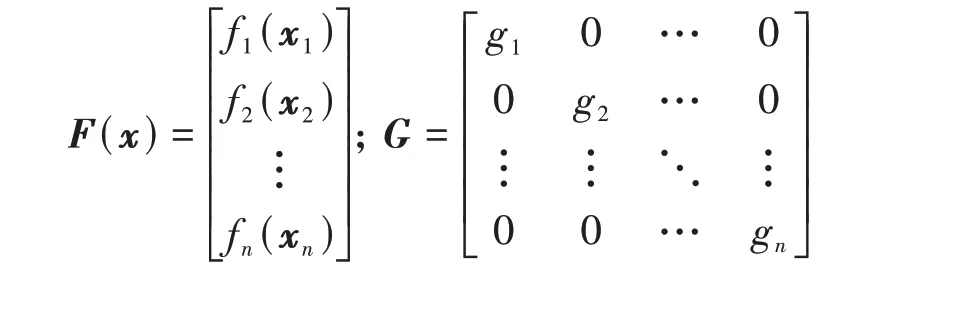
2.1 隊列狀態空間表達


其中:
2.2 時延補償器設計
云控場景中,時延問題是普遍存在的。延遲通信結構圖如圖3 所示,云控平臺中的信息流拓撲結構中,狀態反饋數據從車輛傳感器通過網絡傳遞到云控中心,存在上行通信延遲,記為;控制指令再由云控中心返回至車輛執行器,存在下行通信時延,記為,其上界為ˉ;通信回路總時延為τ,即τ=+。這種通信時延往往會帶來一些控制穩定性問題。
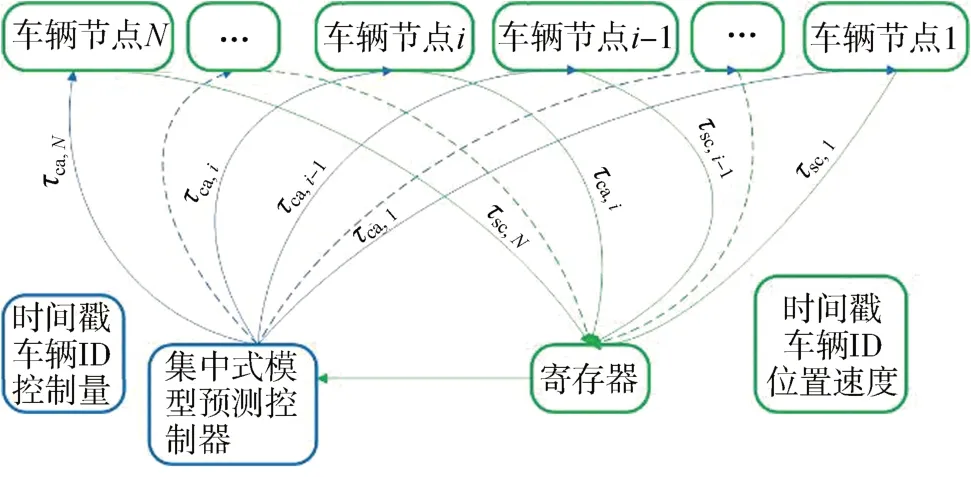
圖3 延遲通信結構圖
為解決通信時延帶來的車輛隊列控制穩定性問題,本文中提出一種可以在一定時延范圍內保證隊列穩定的時延補償方法,該方法描述如下。
網絡通信中的每一幀數據包都含有時間戳信息,任意時刻的控制優化計算中都會更新τ。隨機延遲示意圖如圖4所示,時刻車輛傳感器發送數據包P={X,}至云控中心,其中X和分別為車輛行駛狀態信息和對應的時間戳。可以看出,P、P、P、P到達云端控制器的通信延遲步長分別為1,3,1,2。其中,P為超時數據包將被丟棄并替換為P。因此,該圖示中對應時刻+ 1 至+5的目標補償延遲步長分別為1,2,1,2,2。
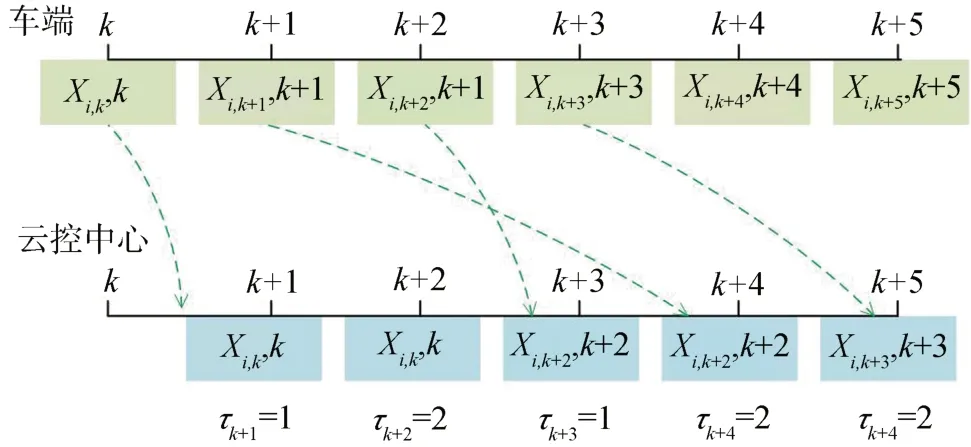
圖4 隨機延遲示意圖
在云控制器端,為了估計當前時刻的實際系統狀態(),利用滾動時域控制的模型預測特點,根據已知系統狀態(-),迭代推導當前系統狀態()。車輛的狀態空間表達更新為
式中= 1,2,…,。通過寄存器數據存儲獲得當前時刻的反向步長下的控制輸入,即(-+- 1)。因此 可根 據 車輛的 歷史 控 制序 列(-+- 1)和控制端接收到的(-|-)預測當前時刻系統狀態(|-)。
為補償下行通信中時延,根據式(8)估計系統狀態(+ˉ|-),設計反饋控制率:

式中為本系統中的集中式模型預測控制算法的控制率,將在下一小節中的優化問題求解得到。依據式(9)將輸出控制序列和對應時間戳封裝為數據包并通過下行通信傳遞至車輛執行器,即

在執行器中,時延補償器將從接收到的最新控制指令序列中選擇一個合適的控制信號。假設時刻的下行通信延遲為,即控制序列為U 。為了補償上行和下行通信時延,選擇控制量如下:

式中U {}指的是序列U 中的第個控制元素。令τ=+,即上行與下行通信總延遲為τ,則式(10)可更新為

由此,當通信回路總時延為τ時,通過以上時延補償算法可處理云控場景中隊列控制的通信延遲問題。
2.3 目標優化問題
本文中所提出的考慮通信時延的集中式模型預測控制方法結構如圖5所示。
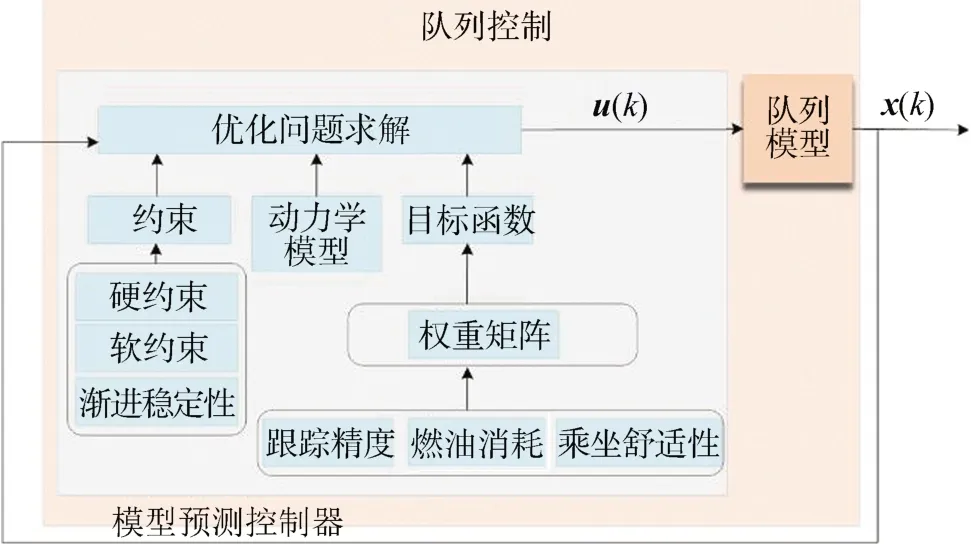
圖5 控制流程圖
其中,跟蹤參考軌跡的位置與速度是隊列控制中的重要優化目標之一。跟蹤精度將直接反映隊列控制算法的效果。該項優化目標可表示為
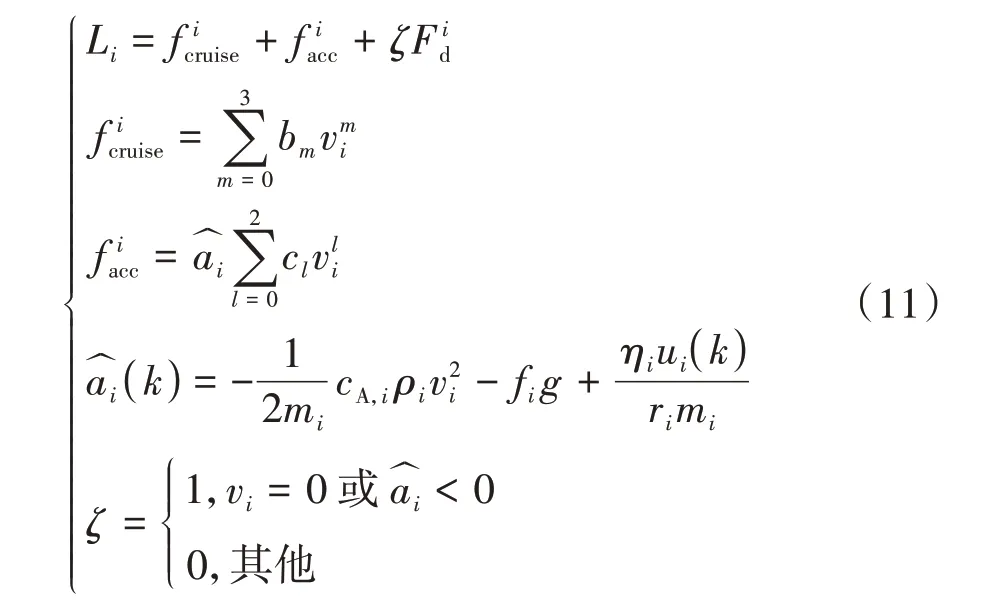
隊列控制的另一個重要目標是實現能耗降低,本系統將能耗模型引入優化隊列控制優化目標。

集中式模型預測控制方法將解決一定預測步長內帶約束的二次優化問題。考慮上述車輛隊列的優化目標,定義代價函數為

其中,每輛車的優化問題和約束條件為

式中:輸入約束為U=[u,u];狀態約束為X=[x,x];為對應避撞耦合約束;第5 子式為終端約束;第6子式用于保證系統跟蹤穩定性。


相應的閉環系統為

3 單車跟蹤穩定性分析
現證明單車的跟蹤穩定性,據文獻[8],考慮單車的跟蹤目標函數:

則單車的經典跟蹤目標優化控制問題表達如下:
定義函數為
定理1:在假設1 的條件下,式(13)優化問題在初始可行集內具有漸進可行性。



再次考慮式(19),通過推導可得
另

根據式(16)可得到
根據假設1可得

由此得到函數是正定的,式(19)控制序列是式(13)的可行解。
由于V(x,u)在平衡點上是正定函數,因此值函數沿系統單調遞減。由此可得,第輛車的閉環系統的平衡點是漸進穩定的。
4 仿真結果與分析
以5 輛重型貨車編隊運行為例,通過基于Simulink 與TruckSim 聯合的仿真實驗來驗證本文中提出的時延補償算法的有效性、集中式隊列控制算法的串穩定性,并與分布式隊列控制進行比較,進一步分析不同時延下的集中式隊列控制的性能指標。
4.1 仿真參數設置和環境配置
選用動態速度跟蹤工況,即仿真過程中頭車存在加速和減速,用于考察交通振蕩時隊列控制器的性能。領頭車的運行根據加速度控制實現,其加速度變化如圖6 所示。預設初始速度為20 m/s,在仿真 時 間∈[10,20]s 時,車 輛 減 速,減 速 度 為-1 m/s,當∈[60,70]s 時,車輛加速,加速度為1 m/s。
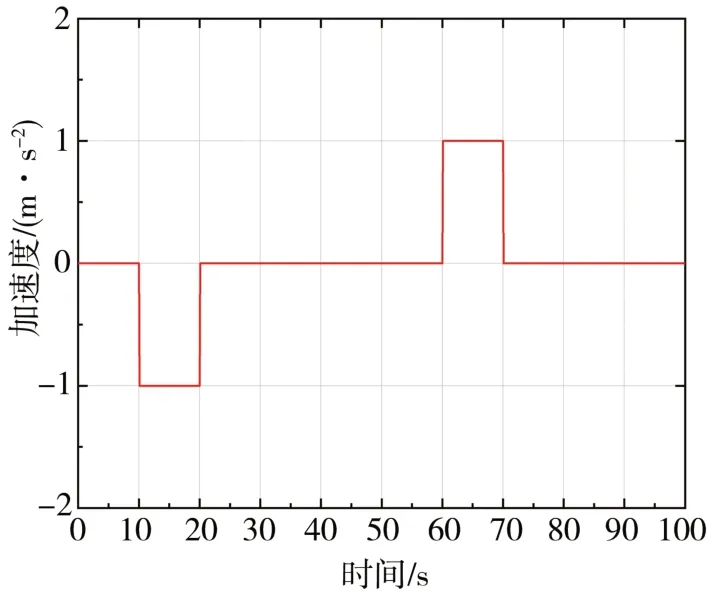
圖6 頭車參考輸入

圖7 5輛重型貨車編隊在TruckSim三維環境中仿真運行顯示
假設車云之間的通信時延是符合高斯分布、獨立的、具有各態歷經性的平穩隨機過程,對于均值為100 ms、抖動為±20%的時延,其隨時間的變化如圖8所示。
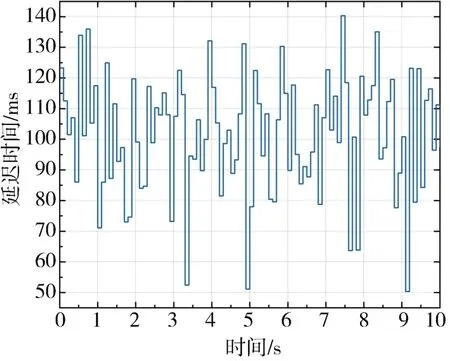
圖8 車云間通信時延隨時間的波動(均值為100 ms,并存在±20%的波動)
4.2 時延補償器有效性驗證
為驗證本文中提出的時延補償器的有效性,進行有時延處理與無時延處理的控制算法的速度跟蹤對比,結果如圖9 所示,所采用的時延見圖8。可以看出,無時延處理時速度跟蹤大幅振蕩,控制算法不穩定,無法應用于隊列控制。經過本文中提出的時延算法處理,跟蹤速度逐漸收斂于參考值20 m/s,控制效果穩定,可實現隊列穩定跟蹤控制。
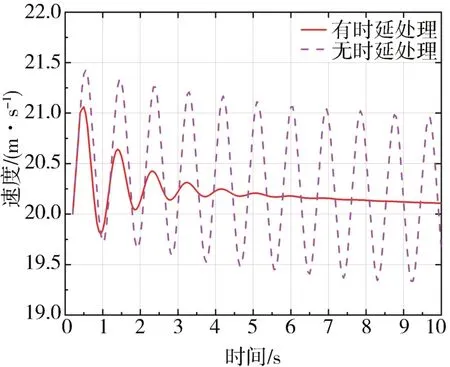
圖9 時延補償算法效果對比
4.3 串穩定性驗證
為驗證本文中所提出的集中式模型預測控制方法在車輛隊列運行控制應用中的串穩定性,以時延均值100 ms、時延抖動±20%為例,進行隊列運行仿真分析。
圖10 展示了在仿真時間長度100 s 中各個時刻的隊列中每輛車的位置。整體來看,所有的車輛軌跡接近平行,說明各車相對距離保持穩定,且軌跡并無交叉,證明該算法可有效避免車輛碰撞事故,保證系統安全。圖11 的速度變化對應于系統輸入,隊列中各車輛速度逐漸收斂于參考值,從仿真時間的第10 s 開始減速,參考輸入速度從20 減速至10 m/s;從仿真時間= 60 s 開始,車輛以1 m/s加速持續10 s,最后穩定速度在20 m/s。可以看到,速度變化均勻,速度跟蹤表現良好。圖12 進一步展示了相鄰兩車間距。車距跟蹤誤差在車輛速度變化階段變化較大,但是各車車距迅速協同收斂。具體來說,仿真過程中的車距誤差均值為-0.252 m,標準偏差為1.682 m。在車速穩定階段,跟蹤精度可以良好保持在1 m以內,具有良好的位置跟蹤精度和控制穩定性。如圖13 所示,各車速度跟蹤誤差均值為0.028 m/s,標準偏差為0.769 m/s,車輛隊列的速度跟蹤效果良好。對比各跟蹤車輛車距跟蹤誤差和速度跟蹤誤差可得,誤差沿隊列車輛自前而后降低,驗證了本文提出的集中式模型預測控制算法具有串穩定性。
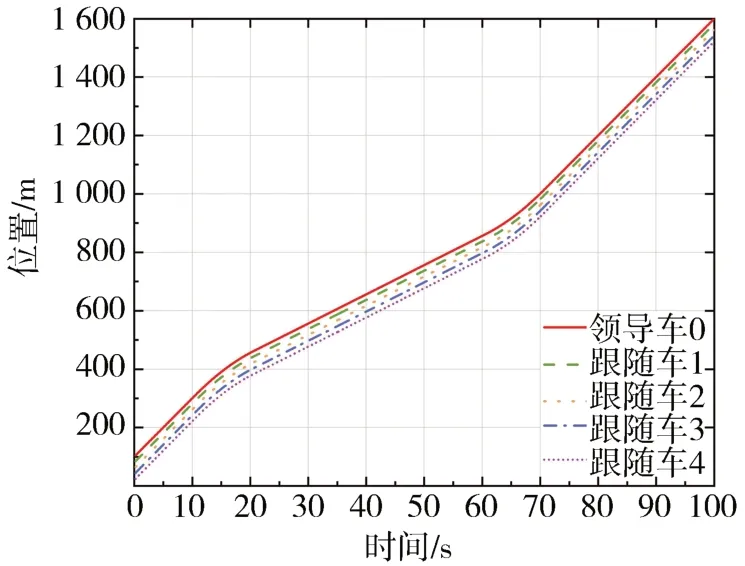
圖10 隊列各成員位置隨時間的變化
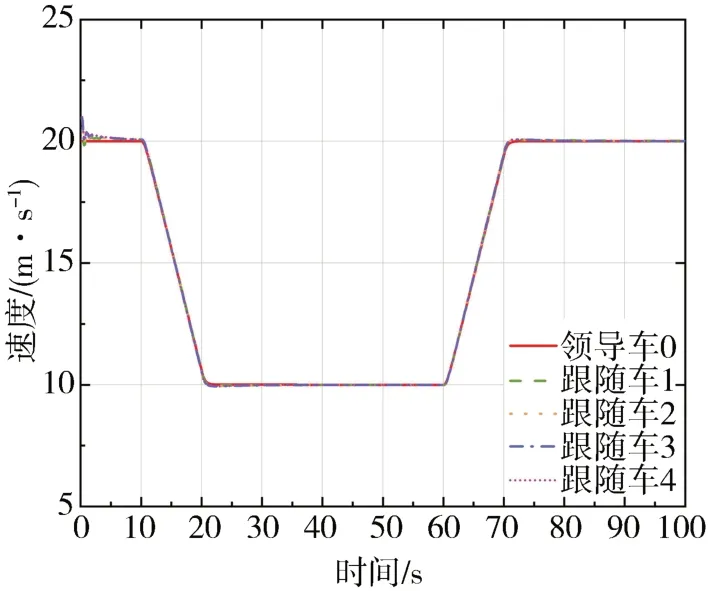
圖11 隊列各成員車的速度隨時間的變化
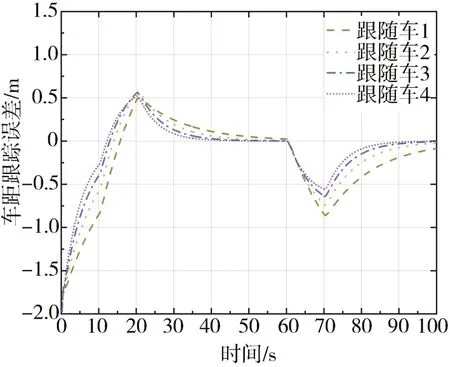
圖12 隊列各跟隨車車距誤差隨時間的變化
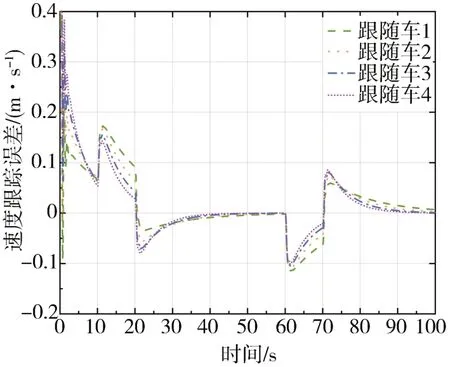
圖13 隊列各車速度跟隨誤差隨時間的變化
4.4 與分布式控制方法比較分析
本節進一步評估隊列集中式控制與分布式控制方法的差異,仿真參數與4.3節相同。兩種控制方法選用相同的車輛模型;兩種控制方法選用的MPC算法代價函數不同,不同之處在于分布式去掉了用于隊列整體優化的式(12)代價函數。
圖14~圖16 分別對比了車距跟蹤精度、速度跟蹤精度和燃油消耗率。如圖14所示,集中式MPC算法的車距跟蹤效果在整個仿真時間長度上均較為優于分布式算法。具體來看,集中式與分布式的車距跟蹤誤差的均值分別為-0.252和-0.291 m,集中式較分布式控制算法可提升車距跟蹤精度14.1%。速度跟蹤精度變化如圖15 所示,相似于車距跟蹤對比結果,速度跟蹤精度在頭車速度急劇變化階段波動較大。其中,分布式的速度跟蹤誤差波動大于集中式;當領頭車處于穩速階段時,速度跟蹤誤差均呈現減小的狀態,即均能收斂于期望速度值,此時集中式隊列速度跟蹤誤差均值0.028 m/s 與分布式隊列速度跟蹤誤差均值0.029 m/s相差不大。綜合來看,本文中提出的集中式隊列模型預測控制算法在隊列跟蹤效能方面不差于分布式模型預測控制算法,甚至會在一定程度上優于分布式。
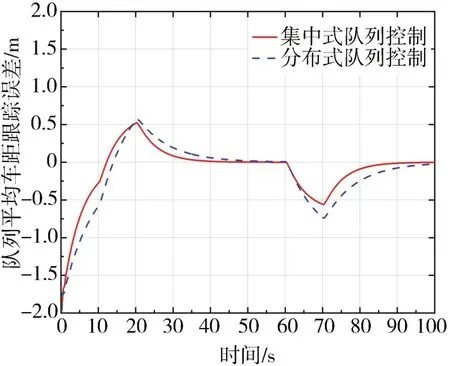
圖14 車距跟蹤誤差對比

圖15 速度跟蹤誤差對比
能耗是隊列控制中的一項重要優化指標,本文中對比了集中式與分布式控制的燃油消耗,如圖16所示。集中式控制算法的燃油消耗率波動明顯低于分布式控制算法。集中式與分布式控制算法的隊列燃油消耗率均值分別為4.216與4.355 mL/s,即集中式燃油消耗率數值略低于分布式控制算法。總的來說,集中式具有較好的全局優化優勢,可以針對隊列整體有效優化能耗指標,相對于分布式模型預測控制算法降低燃油消耗約3%。
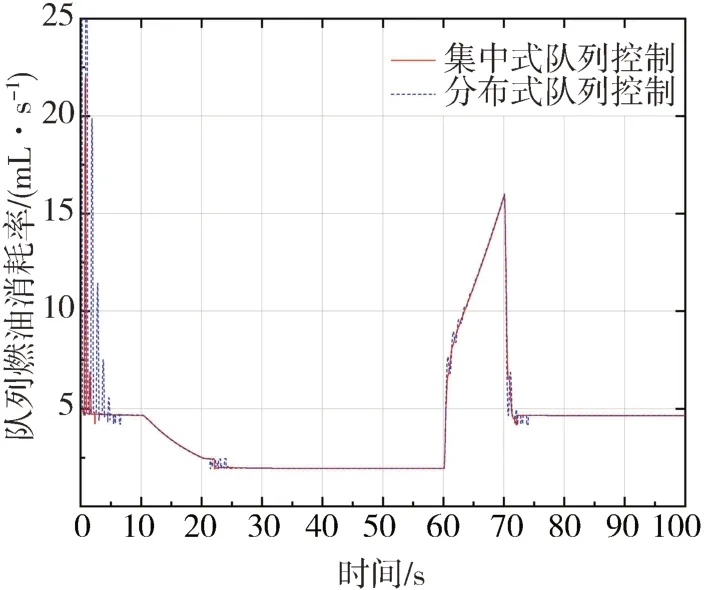
圖16 能耗對比
4.5 時延對隊列控制影響分析
為了考察不同車云通信時延下集中式控制方法和時延補償算法的性能,選擇平均時延分別為50100150200 和250 ms 且時延抖動均為20%的云控場景進行仿真分析。
圖17 和圖18 分別比較了不同時延條件下的跟車間距誤差的平均值和標準偏差。由圖可見:車距誤差的平均值和標準偏差在隊列中都是依次減少的,滿足隊列的穩定性;隨著通信時延的增加,跟車間距誤差的均值和標準差整體上升,隊列串穩定性有所下降。從數據來看,在穩定性隊列系統中,時間延遲越小,對應的均值和標準差越小。其中,最小值均表現在= 50 ms 時,尾車的車距跟蹤誤差均值為0.077 m,車距跟蹤誤差標準偏差為0.850 m。最大值表現在= 250 ms 時,頭車的車距跟蹤誤差均值為0.223 m,車距跟蹤誤差標準偏差為3.155 m。該結果表明,在一定的時延范圍內,本文算法可有效滿足車輛隊列的車距跟蹤精度并保證隊列串穩定性。
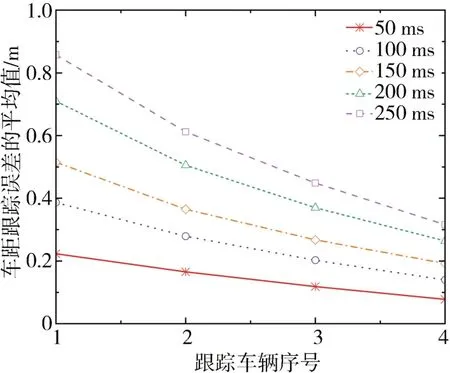
圖17 車距跟蹤誤差平均值
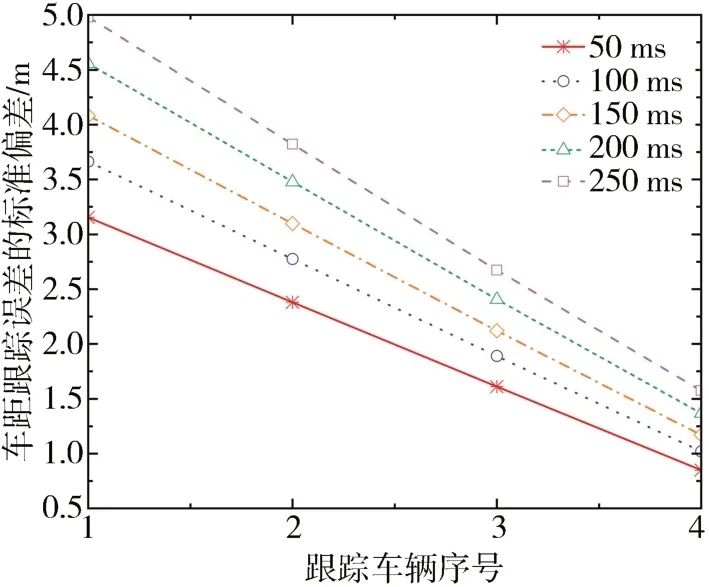
圖18 車距跟蹤誤差的標準偏差
圖19 和圖20 為速度跟蹤誤差的均值和標準偏差,可見也有類似車距跟蹤誤差變化的趨勢和特點。時間延遲小于200 ms 時,速度跟蹤誤差的均值和標準差在隨跟隨車輛序號遞減,符合隊列串穩定性。相反,時間延遲為250 ms 時,速度跟蹤精度差,速度振蕩明顯,隊列進入臨界失穩狀態,這主要由于在模型預測控制中的模型存在誤差,模型誤差累積隨時延的增大而增大,當時延達到某一臨界值時,所累積的誤差無法通過已知信息補償。
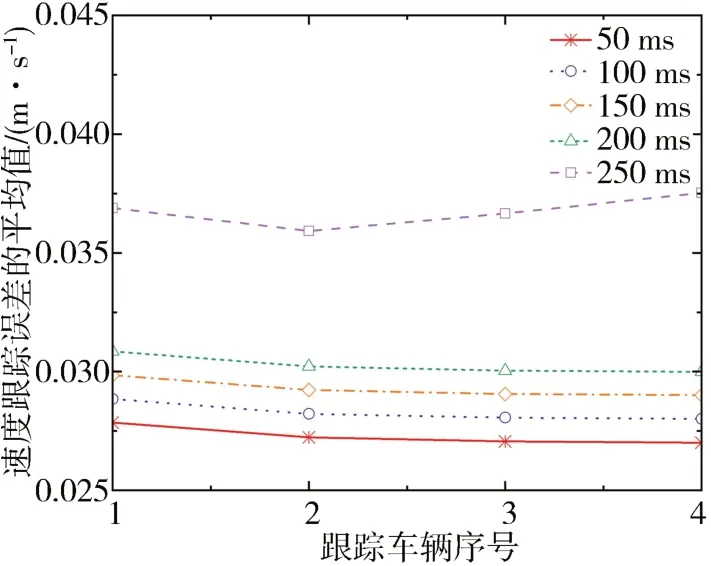
圖19 速度跟蹤誤差平均值
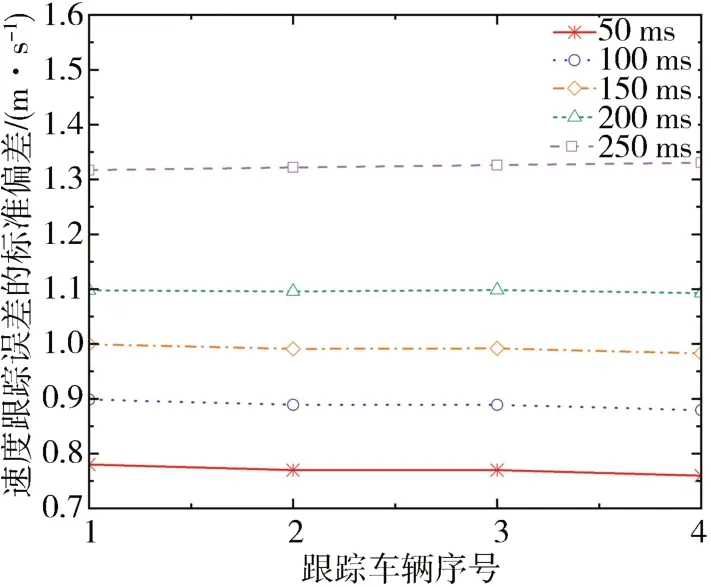
圖20 速度跟蹤誤差的標準偏差
具體來講,在穩定系統中,時間延遲越小,對應的速度跟蹤誤差均值和標準差越小。其中,最小值均表現在= 50 ms 時,尾車的速度跟蹤誤差均值為0.027 m/s,速度跟蹤誤差標準偏差為0.759 m/s。最大值表現在= 200 ms時,頭車的速度跟蹤誤差均值為0.030 m/s,速度跟蹤誤差標準偏差為1.098 m/s。該結果表明,本算法在一定時間延遲范圍內可有效滿足隊列速度跟蹤的精度。
綜上,由于位置和速度跟蹤隨隊列從前往后逐級衰減,從而表明本文中提出的集中式隊列控制算法和時延補償算法在多個時延環境下都具有良好的隊列串穩定性。
由于車輛燃油消耗作為重要的隊列性能指標之一,本算法考慮了包含燃油消耗的目標函數,以加強隊列經濟性。圖21 顯示了不同通信延遲下在仿真時間內的各跟蹤車輛燃油消耗量。其中,臨界穩態= 250 ms 條件下的失穩隊列燃油消耗量最高,跟蹤車輛3 的燃油消耗量最高為95.7 mL。燃油消耗大幅高于其他時延狀態下的穩定隊列狀態。=50 ms 時,各跟蹤車輛燃油消耗最低,其中,跟蹤車輛4的燃油消耗量最低為83.8 mL。具體來說,當通信時延分別為50、100、150 和200 ms時,對應的跟蹤車輛燃油消耗量平均值分別為84.5、85.4、86.5 和88.3 mL。也就是說,隨著通信時延的增大,能耗相應增加。從趨勢上看,當∈[0,200] ms 時,由于空氣動力學原理,隊列的燃油消耗量沿隊列跟隨車輛從前向后逐漸下降,證明本算法的隊列燃油經濟性表現良好。但隨著時延增大,在本仿真實驗值當時延達到= 250 ms 時,跟隨車由于本車控制穩定性變差,速度振蕩明顯,導致燃油增加,抵消甚至超過了空氣動力學帶來的能耗下降效應。
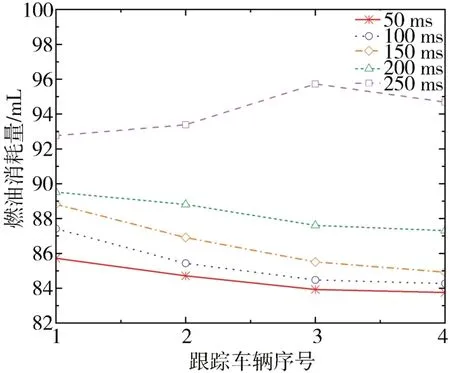
圖21 燃油消耗量
不同時延下的隊列跟蹤指標與燃油消耗匯總如表1 所示。由于模型預測控制中存在建模誤差,根據實驗結果測得通信延遲的上界為250 ms。隨著通信時延的增大,車距跟蹤誤差和速度跟蹤誤差略有下降,綜合來看,車距跟蹤誤差小于1 m,速度跟蹤誤差小于0.1 m/s,可以良好滿足隊列跟蹤精度要求;另外,隊列燃油消耗總量隨通信延遲的增大而增大,但相對于分布式模型預測控制實現節油約3%。
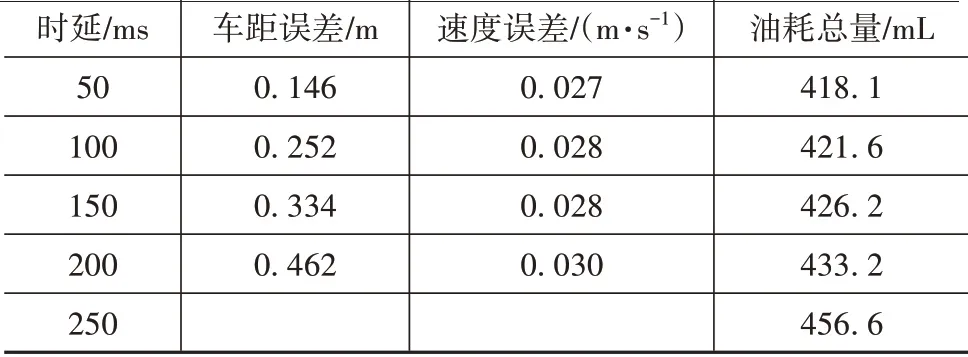
表1 隊列控制結果
5 結論
本文中面向云控場景下的車輛隊列控制設計了一種考慮通信時延和時延抖動的集中式模型預測控制算法。在云控系統的邊緣云部署基于該算法的隊列中央控制器,并以跟蹤精度、燃料經濟性等為優化目標進行隊列實時控制。通過理論分析和仿真實驗分別證明了該方法的漸進穩定性和串穩定性。通過仿真實驗,驗證了本文所采用的時延補償算法可以有效提高時延上界。其中,時延均值200 ms 且時延抖動20%時,隊列可以穩定運行,而時延均值250 ms且時延抖動20%時隊列處于臨界穩定,此時隊列的跟蹤參數將無法得到衰減,雖然可以進行實際運行,但會隨著隊列成員增多而面臨失穩的可能。為保證本文提出方法在云控場景下的實際部署,后續的研究中將進一步引入橫向動力學因素,針對云控場景的隊列控制的實際應用形成更為一般性的結論。
在云控場景下,邊緣云依靠低時延、高算力、融合感知能力強的特點,將為智能網聯汽車提供面向通行效率和節能的決策控制服務。本文通過理論分析和仿真實驗明確了隊列控制所需要的時延指標,為云控系統的邊緣云設計提出了要求。隨著未來智能網聯汽車云控系統的逐漸成熟和車輛隊列應用的日趨廣泛,基于邊緣云的集中式車輛隊列模型預測控制算法將成為云控系統的一類重要應用。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
