淺析引航中的速度及船舶與泊位的位置關系判斷
2022-03-04 21:52:22歐陽青林
中國水運 2022年2期
歐陽青林
摘 要:航速在船舶操縱中是一個非常重要的因素,很好地掌握速度及判斷好船位與泊位之間的距離,綜合分析情況制定相應的引航方案,并保證引航方案的成功執行,是引航作業的關鍵。培養速度感及距離感是刻意學習理論在引航作業中的應用實踐。
關鍵詞:速度;距離;判斷;纜間距測量法
中圖分類號:U675? ? ? ? ? 文獻標識碼:A? ? ? ? ? ? 文章編號:1006—7973(2022)02-0111-03
1 引言
最近在中國臺灣高雄港的集裝箱船撞橋吊和去年韓國釜山港“米蘭橋”輪撞橋吊都跟極限輕載下的操縱困難認識不足有關。速度和距離判斷是引航作業的關鍵指標。速度在引航過程中是個非常重要的因素,船舶在運動過程中有三個方面的速度:縱向速度、橫向速度和旋轉速度。一般認為主機功率與速度之間應該滿足“因果”關系,但是筆者認為應更重視這個“果”,即“速度”,港內操作更要關注港速。
船舶大型化后,操縱者靠離泊時判斷碼頭前沿船舶與岸壁距離帶來新的挑戰。視覺判斷是最快捷的判斷手段,船舶速度感和距離感的形成過程就是船舶運動感覺在人腦中形成的經驗和認識。通過經驗的積累,《刻意練習》中強調挑戰自己的舒適區,在實踐中用電子儀器核實優化自己對縱向橫向及旋轉速度的判斷,縱向及橫向距離的判斷,對提升引航能力,強化引航技術,更好地提高引航安全都有重大意義。
2 速度
2.1 縱向速度
引航員在引領船舶進港時,參考引航卡,應區分主機轉速對應船速列表中給出空船和滿載時的船速差異,全速/半速/慢速/微速對應的船速以及各車之間船速的遞減率。掌握遞減率是為了更精確地掌握減車時的船舶速度遞減率。
從筆者的引航實踐中觀察到,引航卡中船舶正車與對應時的倒車主機轉速一樣,知道前進的動力就能大概推導出倒車時主機能提供的倒車力大小。因為固定螺旋槳FPP的倒車功率是前進功率的70%左右,可變螺旋槳CPP車的倒車功率為前進功率的50%左右。不過現在有的大型集裝箱在引航卡上標注倒車功率為30%多,這點要特別引起注意。
2.1.1船舶的實際平均吃水、船寬和船長
關注吃水、船寬是了解船舶的排水量也就是船舶的質量。在物理學上物質的慣性由質量決定,質量越大的船舶慣性越大。而船寬與船舶所受的水阻力成正比,船寬越大船舶水阻力越大。
2.1.2船舶實際吃水
一般船上會用不同顏色油漆給予標示滿載水線,登輪時應關注實際水線與滿載水線之間的高度差。因為一艘船舶的主機功率的設定是以空載及滿載時的排水量設定的。實際吃水結合引航卡提供的速度參考值可推算當前裝載下的慣性和主機功率的匹配關系,也就是單位排水量下的主機功率。
2.1.3 吃水差
船舶不同吃水差在行進時,其水下形狀不同。平吃水水下的水阻力小減速慢,而吃水差大的船舶水下船體成楔形,通常尾傾船的水阻力面大相應的減速快。對于小船輕載時要特別關注吃水差對船減速的影響,這也影響旋回圈的大小。
2.1.4不同車鐘速度遞減區間大小的重要性
船速與船舶行進中受到的水阻力并不是線性關系的,而是非線性關系的,速度越高時,船速和水阻力曲線的斜率越大,速度越低時這個曲線的斜率越小。在加車時,觀察船舶加車性能以判斷主機性能,不過增速同時受加車遞增區間大小的影響。同樣在減車時判斷船舶慣性大小也要剔去遞減率對船舶減車快慢的影響。能夠在加減車的同時很好地掌握主機性能和船舶慣性,對后續的靠泊操縱便能做到心中有數。
2.1.5 船舶微速的重要性
微速的重要性表現在以下幾方面:一方面確定倒車用什么車合適,例如有小船微速7節,也有的微速3節。到泊位要倒車時前者減速效果好些,后者可以直接用慢車倒車,因為正車才3節,微速倒車功率太小。另一方面,小船拖錨靠泊時,知道微速大小可用于推定拋錨出鏈長度,拋多少節錨開車能拖得動。在同樣的外界靠泊條件下,微速為7節和3節的停車時機和拋多少節錨是不一樣的。
2.1.6極限狀況下的船況對速度的影響
當船舶裝載在滿載時、特別輕載時、船很新剛下水時和船舶很舊時,對操縱性能都有很大的影響。
(1)滿載時船舶慣性大,單位排水量下船舶分配的主機功率小。
(2)特別輕載時船舶質量輕慣性小,同時水下面積也小,縱向的橫向的阻力都小,在入泊時用拖輪頂時要知道可能橫向余速遞減較慢。同時輕載水線上面積增加,干舷高受風面積加大,拖輪頂時受船體船頭船尾船型流線更凹陷,頂推點更靠船中;如果要放纜拖時放纜要比干舷低時放得更長,時機要充分,不然拖纜不夠長,拖輪提供的順纜繩方向的縱向分力小。再有一種情況是輕載時船尾螺旋槳有部分在水面之上。這種船停車余速遞減可能很快,但是倒車時速度遞減則相對慢,因為螺旋槳水線上部分不能有效地提供倒車動力。
(3)特別新的船主機還處在磨合階段,不能滿負荷工作,同時船上人員對船舶設備也在熟悉階段。
(4)特別舊的船主機、錨機等都處于低標準狀態下,要拋錨時不能拋下,要倒車時沒有車的概率都很高,同時低標準船上很多配員也是低標準的,這些因素都會影響船舶操縱安全,以上這些極限狀態船舶,在操縱時余速控制上和轉向旋回時要更加謹慎,引航方案中的應急計劃要考慮更充分些。
2.2橫向速度
及時準確地預判橫向速度在靠泊時非常重要。橫向移動速度不但受風流大小的影響,同時還受風舷角和流壓角的影響。知道外界的風力風向、流速流向是預判橫向移動速度的前提條件。風力風向易于判斷,而流向流速難于準確地知道。除了通過潮汐表來推斷外,還可通過觀察受風流影響的水面漂浮物的態勢判定。例如海圖上岸壁水深的走向分布、錨地船的大體走向、燈船形態、燈浮標處的流花流線、水面漂浮物的移動方向(水面漂浮物流動要剔除風及風生流的影響)。總之,流的判定是經驗加現場的觀察。
2.3 旋轉速度
在進車時用舵轉向可以判定船舶舵效好壞,轉頭速率ROT,在要把定后觀察舵工操舵熟練程度,風流對船舶偏轉速度的影響。在快到泊位前停車趟航這段距離要勤于觀察舵角指示器,看看用什么舵才能把定船舶。因為停車后所有的風流對船舶旋轉速度的影響都要用舵去調整,同時要考慮淌航余速。現場掌握風流,船速對船舶航向穩定性、轉向性能的了解。例如一艘快要向右轉向入泊的船,現在用左滿舵剛剛能把定,而另一艘也是需要同樣操作的船用正舵就可以把定,在不考慮其他因素的情況下前者向右轉向就更從容些,但前者也更容易失去舵效。船舶在倒車時關注倒車側壓力對船舶旋轉的影響,側壓力對船的影響各個船差異非常大,要小心謹慎的處理以達到充分利用和有效遏制。
3 速度觀測
船上能夠從設備上讀取船舶速度的是GPS和測速儀。GPS測速原理是衛星連續的定位,同時知道兩次定位之間的時間間隔,通過計算出來的V=S/T,所以顯示的速度是GPS天線位置的綜合速度,其中包括橫向、縱向和旋轉速度。測速儀因工作原理不一樣分為對水速度和對地速度,很多大船上多普勒計程儀上的速度顯示還有橫向速度。筆者感覺多普勒速度在靠泊時速度有滯后性。
所以最有效和直觀的是培養自己的速度感,通過觀查船舶周邊的物體來判斷船舶縱向和橫向速度。
3.1 觀察橫向的疊標
當前位置到最近疊標的距離不同感覺差異很大,因為這是線速度和角速度的關系V=?R,觀察疊標時當船到物標距離(R)不同時角速度(?)是一定的,同樣的速度感(?)時R越大實際速度越大,也就是同樣的速度感下,船離觀察疊標越遠速度越大,反過來考慮也可以。
3.2 觀察固定物標
人船合一時,自身感覺的速度就是船舶移動的速度,在實際中這種判斷速度的方法很難,但是要能很好地掌握那就是一個很高的境界。筆者通常做法是,視野中把兩邊港池固定物標融入眼界中同時虛化掉本船,就能感知船舶的綜合速度。觀察水流,特別是在有倒車時觀察倒車排出流向前移動的距離來判斷速度,一般情況下當排出流到船中時,此時船基本沒有對水速度。這種情況特別是在錨地拋錨周邊物標少更實用。
4距離判斷
通常靠離泊時,其中船舶到泊位縱橫向距離判斷的精度對操縱船舶靠離碼頭非常重要。
4.1利用參考物標
例如集裝箱橋吊橫梁長度,利用太陽斜照產生的影子投射到碼頭或水面的位置,利用側推或拖輪排出流來判斷船頭的位置。
4.2利用助航儀器
雷達或電子海圖ECDIS上顯示的距離,其中需要注意的是雷達顯示參考點REF POINT有兩種模式天線點ANT和操作點CCRP,利用電子設備的數值就可以知道各個設備的精度和缺陷性。
4.3用刻意學習的方法
在平時的引航經驗積累中,要有意識地培養自己的判斷能力,特別是速度感和距離感。在引航實踐中來挑戰自己的舒適區,在實踐中用GPS速度和雷達測距來核實和對比觀測速度和距離,優化自己的速度和距離感。《刻意練習》中的方法對提升引航能力是非常有用的,例如良好的心理表征、挑戰自己的舒適區、對結果進行核實等。
4.4 纜間距測量法
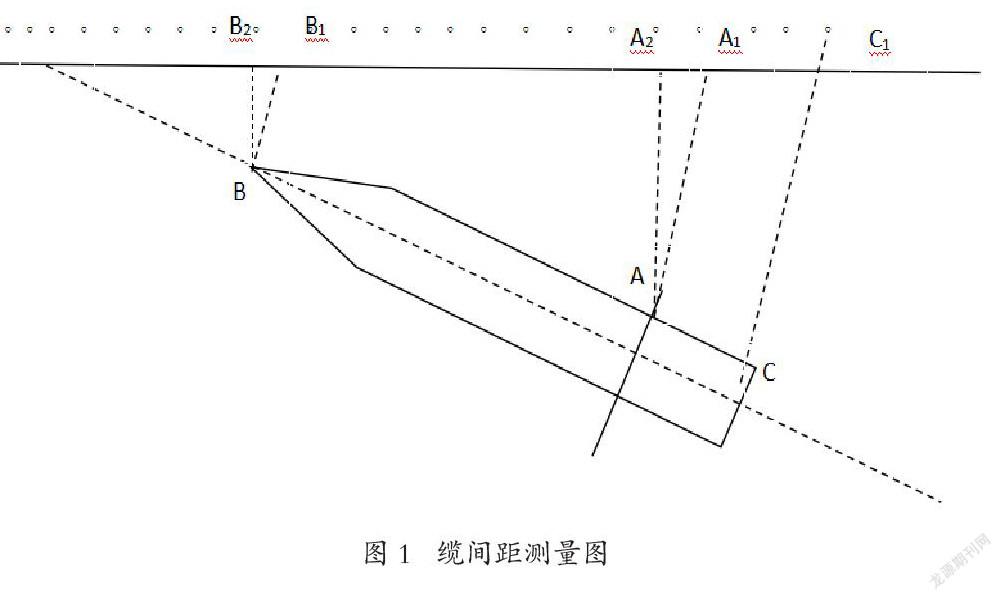
如果把駕駛臺觀測者的視覺位置放在船頭大副或船尾二副的位置,那樣判斷船頭船尾距離泊位的距離就簡單,而引航員與大副二副的距離就是駕駛臺到船頭船尾的距離。用幾何關系把船與泊位的縱橫距離利用纜間距做刻度尺,再去除船頭船尾觀察者的視覺差就可以了,下面來介紹具體方法。
4.4.1基于視覺判斷
這種方法基于一個視覺常識,人的視覺對對稱圖形的敏感度比對距離的敏感度高,引航員站在駕駛臺兩側A點觀察,在碼頭上找到一點A1用視覺感覺使OAA1成等腰三角形也就是BB1AA1四點成等腰梯形,A1點的確定是憑感覺出來的,也是判斷推算其他位置的基點,很重要。利用等腰三角形和等腰梯形兩斜邊相等。其中AB和AC長度已知,A1點確定后B1和C1都可以倒推出來。例如如圖如果向后離泊掉頭BB1的距離,可以大概認為是船頭到泊位的最近可能碰撞距離(忽略轉心位置造成的旋轉運動),BB1的距離可以用B1點附近的纜間距來讀取(也是利用等腰三角形兩斜邊相等)。此時如果向右掉頭就特別有底氣,隨船后退和離泊角度增大時,A1點也在隨船后退和離泊角度的增加,更新A1同時就能推導出B1點,這樣船頭與碼頭的關系就非常量化了。靠泊離泊注意點不同,不同運動狀態下需要注意的參數不同而已。利用簡單的三角形就可以確定船頭和船尾到泊位的各種距離,可以從纜間距讀取的數據有OB BB1 CC1等。
4.4.2 視覺判斷經驗方法的局限性
如果前后有船,特別是船尾泊位有船還很近時,在判斷A1點時船后退,A1點就可能被別的船給遮擋了而不能確定A1基點,補救措施是一次性開大點角度再有縱向的退速。有的泊位纜間距大小不一,這樣就給讀取距離帶來不確定。船與泊位的關系越量化精度越高,靠離泊時越有底氣。
5 結語
引航操縱中航速和距離判斷是引航安全的基礎,也是作業的關鍵。對縱向速度、橫向速度、旋轉速度的判斷是對船性認知的重點。對泊位邊距離的判斷是保證靠離泊安全的基礎,需長期積累有意識地提高自己的引航能力,培養良好的速度感距離感。
參考文獻:
[1] 趙月林,古文賢.船舶操縱[M].遼寧:大連海事大學,1999.
[2] 安德斯·埃里克森,羅伯特·普爾.刻意學習[M].北京:北京聯合出版有限公司,2017.
