大中型立式水泵機組振動故障診斷技術研究
2022-03-04 00:18:50席傲然莫岳平王玉杰王建明毛新平任學強
科技創新與應用 2022年4期
席傲然,莫岳平,王玉杰,王建明,毛新平,任學強
(1.揚州大學 電氣與能源動力工程學院,江蘇 揚州 225127;2.山西省水利水電勘測設計研究院有限公司,山西 太原 030000;3.廈門品方工程項目管理有限公司山西省分公司,山西 太原 030000;4.山西省平遙縣水利局,山西 晉中 030600)
大中型立式水泵機組的故障排查是保障泵站安全運行不可或缺的一環,立式水泵作為一種常見的水泵類型,若不進行定期故障排查,一旦出現故障再進行維修不僅會大大浪費人力、時間,更可能造成嚴重的安全事故。立式水泵機組的故障主要包括異常振動故障、軸承重度磨損和汽蝕等,其中振動是立式水泵機組故障的最常見表現形式。為了保障立式水泵機組的工作效率和安全可靠性,應對其進行定期振動監測,從而推斷立式水泵機組是否出現故障。然而,不同的故障所導致的振動情況也有所不同,對檢測信號進行處理分析,判斷故障原因,從而提出相應改善措施建議也是十分必要的。因此,通過對振動信號進行監測分析,推斷立式水泵機組的運行狀況是否良好并在出現故障時及時進行維修是保障泵站安全穩定運行的有效方法之一。
1 立式水泵機組振動故障診斷技術發展過程與現狀
我國的立式水泵機組振動故障處理方式的發展大體分為三個階段:
第一階段為事后處理階段,當時由于人們設備維護與檢修的意識薄弱,工具較為簡陋,多數情況下不能夠及時發現設備的異常狀況,只能在發生故障后才進行修理,并且當時對于設備故障維修多依賴于個人的維修經驗,修復時間長,周期長,對于故障類型不能夠做到精確判斷,對于大型立式泵站來說不能夠進行及時的維修很容易造成重大經濟損失。
第二階段為預防性試驗階段,即按照固定計劃,對水泵站進行定期的停運與檢測維修。但對于立式泵站機組,預防性試驗從本質來說是一種離線檢測方式,需要水泵站全程停止運營才能夠進行,并且對于全部件的拆裝檢測所需周期長,耗費人力物力大,可能伴隨著操作不夠靈活,對于故障的判斷有所偏差等問題,難以滿足泵站運行需求。
現階段,由于互聯網及人工智能等技術的快速發展,迅速衍生出了故障診斷技術。通過這種技術的發展與應用,現在可以安裝傳感器采集立式水泵機組的運行信號,對其進行處理與分析,并依賴于機器學習、大數據分析等一系列方法,在不進行停機的前提下對于立式水泵機組的運行狀態進行評估,能夠對立式水泵機組可能出現的故障問題進行預測以及定點判斷,這樣做不僅大大節約了人力物力和時間,還更有效地增強了立式泵站安全運行的保障,避免突發故障的發生[1]。
2 基于解析模型的立式水泵機組振動故障診斷方法
為了更好地描述實際工程中立式水泵系統故障情況,需要工作人員對通過傳感器所檢測到的信號進行分析,或估計出構建系統所需的物理參數,并通過結合物理參數的變化及實際出現的故障現象來建立立式水泵故障數學模型,從而可以對所出現的故障進行分析、預測、定位等。基于解析模型的立式水泵機組故障診斷方法大體可以分為3種:狀態估計法、等價空間法以及參數估計法。
2.1 狀態估計法
狀態估計是一種根據檢測數據來估計動態系統的內部狀態變化的方法。即構建準確的立式水泵數學模型,并通過傳感器測量設備的具體數值,自動排除系統因噪聲或其他影響所帶來的干擾信息,將兩者數據進行對比,所得差值即可用來判斷設備的故障情況。通過狀態估計法可以對數據進行檢測辨識,從而對立式水泵未來的工作狀態進行預測。但使用狀態估計法的前提是需要構建準確的數學模型,但目前是比較難以實現的,因此目前有關研究多集中于增強模型對于安裝檢測系統所帶來的干擾、噪聲等一系列誤差的抗干擾能力[2]。
2.2 等價空間法
等價空間法是一種直接利用立式水泵系統模型輸入與輸出的測量值比較形成殘差,由于靜態等價空間法的實際應用具有較大的局限性,當前基于動態等價模型的等價空間法更為常見。
通過系統輸入與輸出的測量值形成殘差后,比較所測殘差與系統最優運行時的殘差數據可以對立式水泵系統進行故障評價,當殘差為零時對應立式水泵機組與我們構建的模型數據吻合,水泵機組運行正常,反之則有故障產生。然而實際的立式水泵機組因噪聲等外界干擾存在誤差,使得其在正常運行的范圍內殘差值也不為零[3],因此殘差闕值的選擇對于使用該種方法進行立式泵站故障診斷非常重要,若殘差闕值選擇過高,在立式泵站初期發生故障時殘差偏差值較小,會出現不報警或漏報等現象,而殘差闕值過低,因外界因素所引起的殘差數據略微升高就會導致報警而立式水泵機組運行完好的情況[4]。綜上而言,在使用等價空間法進行立式水泵系統的故障診斷時,需要注意殘差闕值的選擇。
2.3 參數估計法
立式水泵系統發生故障時,其發生故障部分的系統參數定會發生改變,從而導致其數學模型的參數也會發生變化,并且不同的參數變化所表示的立式水泵系統故障也不相同。也就是說,當在描述立式水泵系統故障時,可以通過模型不同程度的參數變化來表示。我們可以建立系統的參數模型并找到其與元件參數等量關系式:
其中:θ是建立的系統模型參數,p為我們建立系統模型的物理元件參數。
通過傳感器測量得到實際機組參數θ',代入式中,可以得到實際物理元件參數p',通過p'和p標稱值的比較,便可以得出立式水泵機組實際的運行狀況是否良好,也可以通過p'值的大小來估計立式水泵機組物理元件的損壞情況[5]。因此,參數估計法的原理就是通過立式水泵模型的參數變化來對立式水泵機組的運行狀態進行推測,也可進行參數對比找到故障源。但與狀態估計法相類似,在實際的工程中較難得到精準的數學模型,并且對于等價關系式的建立也存在缺少參數、參數估計不準確等一系列情況,因此也存在一定的缺陷。
3 基于信號處理的立式水泵機組振動故障診斷方法
當系統的數學模型難以建立時,就能夠體現出基于信號的處理方法的優勢。該方法不用建立繁雜的立式水泵系統模型,直接利用信號模型或特征提取的方法進行故障檢測與故障分離,具有適用性強的特點。原本絕大多數的基于信號處理的故障診斷方法都是針對線性系統提出的,但由于其可以提取信號進行處理,因此極易轉化為非線性系統,常見的方法有3種,分別是頻譜分析法、主元分析法以及小波分析法。
3.1 頻譜分析法
頻譜分析法是立式水泵機組故障檢測方法中最為常用的方法之一,通過傳感器采集立式水泵機組的振動數據可以通過頻譜分析分解成振動信號頻譜圖。頻譜圖可以非常直觀地看出立式水泵機組的運行情況,圖中幅值的最突出部分可以與故障情況充分聯系在一起,并提供診斷信息。
頻譜分析法一般依賴于傅里葉變換即
其中:X(f)表示信號所分解出的頻率曲線的幅值大小的分布情況,?(f)稱為相位譜,可以表示頻率曲線的相位分布情況。
3.2 主元分析法
主元分析法的主要原理是將高維信息通過線性變換的方法降維從而構成一個新的低維變量,且產生的新的低維變量是原高維變量的線性組合。通過分析新低維變量產生的信息從而推論原高維變量數據所包含的變化信息,比較這些數據變化值的方差大小確定主元模型,一旦傳感器的實測信號與主元模型信號不一致,就可以判定立式水泵機組發生了故障,并且可以很方便處理數據并進行故障分離。
使用主元分析法進行立式水泵機組的故障診斷過程需要我們著重關注兩個變量的情況,通常在主元子空間建立Hotelling T2統計量進行統計檢驗,在殘差子空間中建立平方預測誤差(Squared Prediction Error,SPE)統計量進行統計檢測。主要步驟如圖1所示。
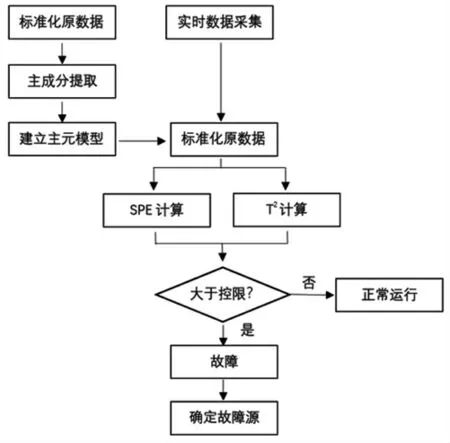
圖1 主元分析法步驟示意圖
使用主元分析法進行故障檢測可以將復雜的問題變得簡單、直觀,且能夠提供原有指標的大部分信息,使得數據集更容易使用。但這種方法同時也存在一定的局限性:若存在被噪音污染的數據,標準化后噪聲的影響會更加顯著;對降維最終得到的數目,也就是潛在的隱變量的數目,不能很好地估計[6]。
3.3 小波分析法
頻譜分析雖然是一種便捷實用的故障檢測方法,但對于大中型立式水泵機組來說,頻譜分析進行傅里葉變換可能并不存在,為了詳盡表達信號在局部的特征,使用小波分析法檢測故障應運而生,彌補了傅里葉變換在立式水泵故障檢測中的不足之處。小波變換的基礎建立在短時傅里葉變換之上,在立式水泵機組采集信號不穩定的情況下占據很大的優勢,具有良好的時頻特性。從系統上來看,小波分析的信號處理方法相當于給采集信號添加帶通濾波器,在分析立式水泵機組的運行狀況時,對傳感器采集的振動信號進行小波變換,可以有效區分突變信號與噪聲,具有非常強的抗噪能力和實時性,檢測效率高,且對多分量的信號分析而言非常便捷。應用小波分析法檢測立式水泵機組故障情況的工作流程如圖2所示。
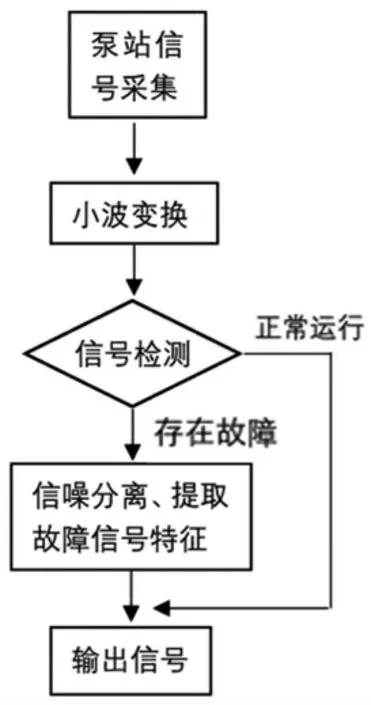
圖2 小波分析在立式泵站故障診斷中應用工作流程圖
文獻[7]給出了以下幾種利用小波分析法進行故障診斷的方法,可以對立式水泵的故障監測與診斷提供很好的思路:
(1)利用小波信號分析直接檢測信號突變的奇異點,從而實現對立式水泵的故障監測。
(2)利用小波分析進行信號頻率結構變化觀測,可以有效地實現對立式水泵的故障監測。
(3)利用立式水泵機組系統發生故障會導致脈沖函數的變化,從而導致少量小波變換系數產生變化來判斷立式水泵機組是否產生故障。
小波分析法應用于立式泵站故障檢測,能夠十分便利地將采集到的故障信號進行多維度分解,從而獲得不同的信號特征,進而實現對于各個部分故障程度的區分,是一種非常實用的檢測方法。
4 基于知識的立式水泵機組振動故障診斷方法
基于知識的故障診斷方法與基于信號處理的故障診斷方法相類似,都不需要建立精確的立式水泵模型,這種故障診斷方法不斷積累以往人們的故障診斷經驗,充分利用統計知識,并將存入的信息與診斷對象進行充分比對,從而精確判斷設備是否發生故障以及設備的故障類型。主要方法分為專家系統方法、人工神經網絡法和模糊故障診斷法等。
4.1 專家系統方法
如圖3所示,專家系統方法其實就是存入大量現有故障信息,在采集到立式水泵系統的檢測信號后,通過綜合性比對,進行快速的分析處理,通過一系列演算推理后能夠定位具有可能性的故障位置及其產生的具體原因。它的系統存儲庫中儲存著大量的故障原因、征兆、表現形式、建議處理意見等數據,因此只需將所測信號與已知數據進行不斷比對,從而推算出最為相近的最優解。專家系統方法在立式水泵的故障診斷中已經具有了較為廣泛的應用,但這種方法存在一定的局限性,那就是由于知識庫內容是有限的,對于沒有出現過的故障數據無法進行演算推理。
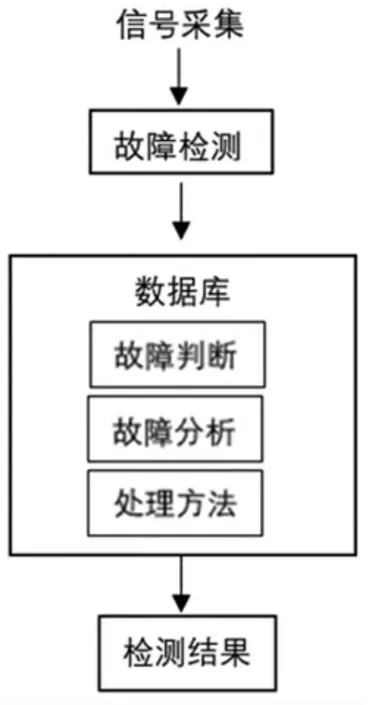
圖3 專家系統方法原理示意圖
4.2 人工神經網絡法
近年來,人工神經網絡法在立式水泵的故障診斷中應用廣泛,它是一種基于模仿人的神經網絡對所獲得的復雜信息進行自主處理的方式,具有自學能力、自組織、自適應的非線性動力學系統,如圖4所示。與專家系統法相比,人工神經網絡的優勢極大地體現在其學習能力上,它的推理是一種數值計算過程,具有分析處理能力以及很強的識別、記憶、聯想功能,可持續獲取新的知識,并將其運用在解決專家系統不能處理的問題上[8]。
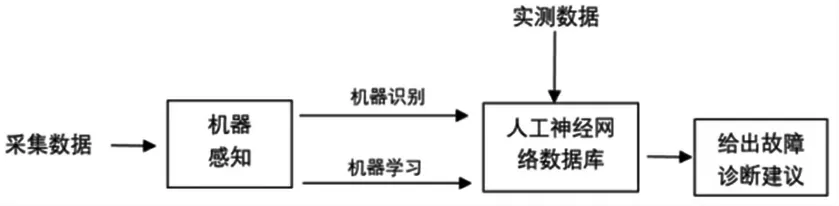
圖4 人工神經網絡法示意圖
人工神經網絡的數據庫具有很強的通用性和容錯性,并可以對于復雜的非新型系統進行處理分析,通過不斷地學習新知識并應用于推廣,可以構建適應性強、容錯率高的數據庫,進行故障類型分析識別后給出故障處理建議,具有很廣泛的應用范圍。但實際運用時也存在一些缺陷:與專家系統方法相似,人工神經網絡也需要大量的基礎數值支撐,進行學習時的過程無法觀測,可能會影響結果可信度,且對樣本選取也有一定的要求[9]。
4.3 模糊故障診斷法
模糊故障診斷法簡單來說就是基于立式水泵機組故障發生的征兆與故障本身之間建立模糊矩陣并將其轉化為模糊方程,通過模糊變換求得征兆與故障之間的關系。具有應用方便,結論直觀的優勢。基于這種方法,結合立式水泵的數學模型難以精確建立的現實情況,我們可以利用模糊方程表示立式水泵機組的振動情況,從而判斷立式水泵的故障原因。但模糊故障診斷法不具備自學能力,且征兆與故障間的關系平衡難以掌握,隸屬函數、特征元素等的選取也存在偏差,一般可以將模糊故障診斷法、神經網絡與小波分析等方法結合使用[10]。
5 結束語
現階段,立式水泵在中國的水利系統中應用越來越廣泛,如供水、工業增壓、液體輸送、灌溉等等,因此立式水泵機組的故障診斷研究并不僅僅局限于此,其故障監測與診斷技術也應成為研究的熱點。本文通過基于解析模型、信號和知識處理方法3個大方向,總結了多種常見的立式水泵機組故障檢測方法,并進行了分析與優缺點對比。
基于解析模型的處理方法通過構建立式水泵的模型,通過將立式水泵模型的參數與實際采集數據進行對比來判斷立式水泵機組的運行狀況,這種方法可以通過數據非常直觀地判斷是否有故障出現,但要精確建立立式水泵機組的數學模型具有很大的難度。基于信號的處理方法是現在較為常見的方法,不需要進行數學模型的建立,直接對采集的數據進行分析與處理,適用性強。基于知識的處理方法依賴于數據庫的建立,需要長時間的積累與學習才能夠對立式水泵機組的運行狀況進行較為準確的判斷,一旦知識庫建立較為完善后可以直接判斷立式水泵機組的故障位置、故障原因以及給出維修建議,會給立式水泵機組的維修提供很大便利。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
