仿生結構在軟機器人中的應用
2022-03-04 00:19:04劉思遠
科技創新與應用 2022年4期
劉思遠,楊 曄
(上海師范大學 信息與機電工程學院,上海 200234)
1 背景介紹
目前,大部分機器人為剛性機器人,在與人或易碎物品交互時,容易使人受傷或損壞物品,因此研究人員將目光轉向軟機器人。軟機器人具有彈性及更高的穩定性,更容易通過狹小的縫隙或管道,且在碰撞時不易損壞[1]。因此,近些年來,軟機器人已經成為一個新興的研究領域。
在不同的應用背景下,軟機器人通常需要單獨設計,包括其結構、材料、驅動方式和運動方法,這些大多可以在自然界中找到類似的原型。自然界中的大部分生物都是軟體結構,通過模仿這些生物,可以在降低軟機器人設計難度的同時,使軟機器人擁有與這些生物類似的能力,或者適應這些生物的生活環境。
本文首先介紹了軟機器人的材料、制造方法、驅動方式和控制方法,然后從結構仿生和功能仿生兩方面綜述了仿生結構在軟機器人中的典型應用,如圖1所示。
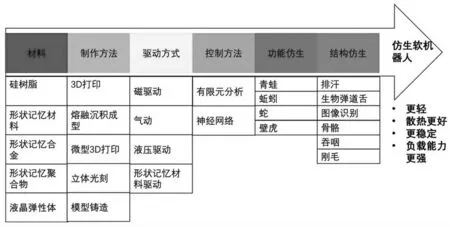
圖1 研究概況
2 軟機器人的基本制造方法
2.1 材料
目前,軟機器人使用的最多的材料是硅樹脂,其優點是易于塑形,易于獲取。但是硅樹脂本身無法產生動力,需要外界驅動[2]。而形狀記憶材料可以自身產生動力,可以類比為軟機器人的肌肉。典型的形狀記憶材料包括形狀記憶合金、形狀記憶聚合物和液晶彈性體。
2.2 制造方法
目前,軟機器人主要的制造方式為3D打印。對于常見大小的軟機器人,通常采用熔融沉積成型(Fused Deposition Modelling,FDM)進行打印[3],這種打印方式的精度通常在毫米尺寸。對于體型更小精度要求更高的軟機器人,可以采用微型3D打印[4]或立體光刻[5]的方法。
2.3 驅動方式
常見的純軟機器人驅動方式包括氣體驅動、液壓驅動、磁驅動和形狀記憶材料驅動。此外通過軟硬結合的方法還可以用傳統機器人的方式驅動軟機器人,如化學反應驅動[6]、電機驅動[7]等。
2.4 控制方法
軟機器人在工作時會受力變形,因此剛性機器人開發的理論很難適用于軟機器人。目前,常見的軟機器人控制方法:有模型控制、無模型控制以及兩者混合的控制方法[8]。有模型控制是指對軟機器人建立模型,然后通過建立的模型推導軟機器人的控制方法,其中最常見的模型建立方法是有限元分析法。無模型控制是指通過機器學習對軟機器人進行控制,最常見的方法是通過人工神經網絡(ANN)進行控制。
3 結構仿生
自然界中的生物經過千百年的進化,其結構能很好地適應其生存環境。結構仿生是通過研究生物肌體的構造,建造類似生物體或其中一部分的機械裝置,通過結構相似實現功能相近,如圖2所示。
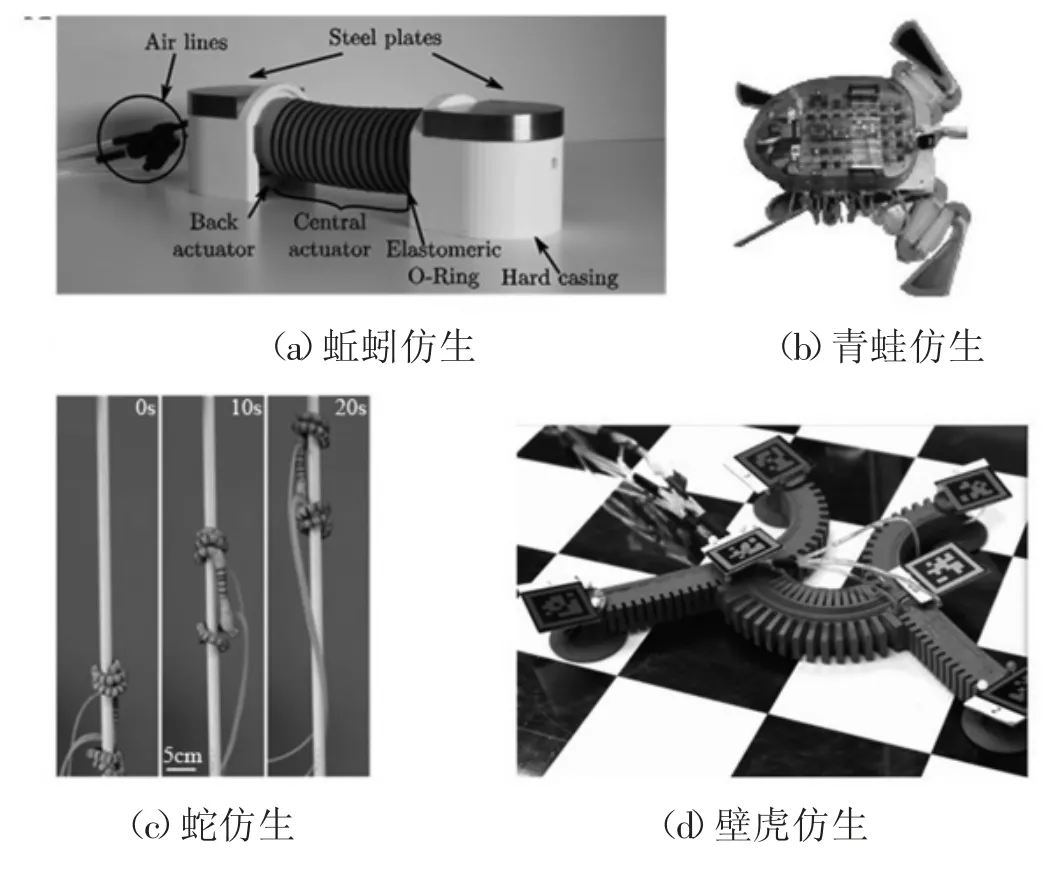
圖2 典型結構仿生圖
3.1 蚯蚓仿生
蚯蚓運動的優點在于多功能性、穩定性和高空間效率。Ge等[9]通過模擬蚯蚓的身體結構,設計出的軟機器人可以通過簡單的氣動結構實現軟機器人的運動。其主要結構為3部分,可以改變對地面摩擦力的前后端和可以拉伸收縮的中間部分。其運動過程分為2個階段:首先前端抓地后端放松,中間部分收縮,將后端往前拉;然后前段放松后端抓地,中間部分拉伸,將前端往前推。
類似的結構也可以應用在磁驅動的軟機器人上。Joyee等[10]設計的軟機器人,兩端為磁性材料,中間部分為軟材料。通過外界磁場可以使兩端左右移動,使中間部分弓起或伸直,從而實現類似蚯蚓的移動方式。
3.2 青蛙仿生
青蛙的雙肢合作游泳法克服了魚尾運動時的側向力和重心偏移問題,使青蛙的運動更加穩定,在較短的時間內達到較高的游泳速度。Fan等[11]通過模擬青蛙的身體結構,設計出的軟機器人直線運動時的平均推進速度為0.075 m/s,平均轉彎速度為15°/s,同時重量和體型均遠小于傳統的硬青蛙仿生機器人。
3.3 蛇仿生
蛇在攀爬樹木時,通過快速纏繞不同直徑的樹枝來提高穩定性。Liao等[12]模仿蛇的身體結構,設計出的軟機器人可以像蛇一樣攀爬運動,包括沿著一根桿拐彎,以30.85 mm/s的最大速度攀爬垂直桿,并且比現有的軟攀爬機器人在垂直表面上承載更大的有效載荷。
3.4 壁虎仿生
通常的軟機器人只能在水平的平面上移動,當坡度過大時,這些機器人就無法正常行動。Schiller等[13]從壁虎的爬行中得到靈感,設計并制造了一款可以在高坡度的斜面上行動的軟機器人,模擬了壁虎的身體結構和運動方式,即通過吸盤吸附在墻壁上,通過四肢和腰部的扭動爬行。通過氣動的方式驅動6個執行器,該軟機器人能夠爬上坡度高達84°的傾斜平面。
4 功能仿生
功能仿生的目的是使人造的機械具有或能夠部分實現高級動物豐富的功能,如思維、感知、運動、操作等,如圖3所示,這在智能機器人的研究中具有重大意義。
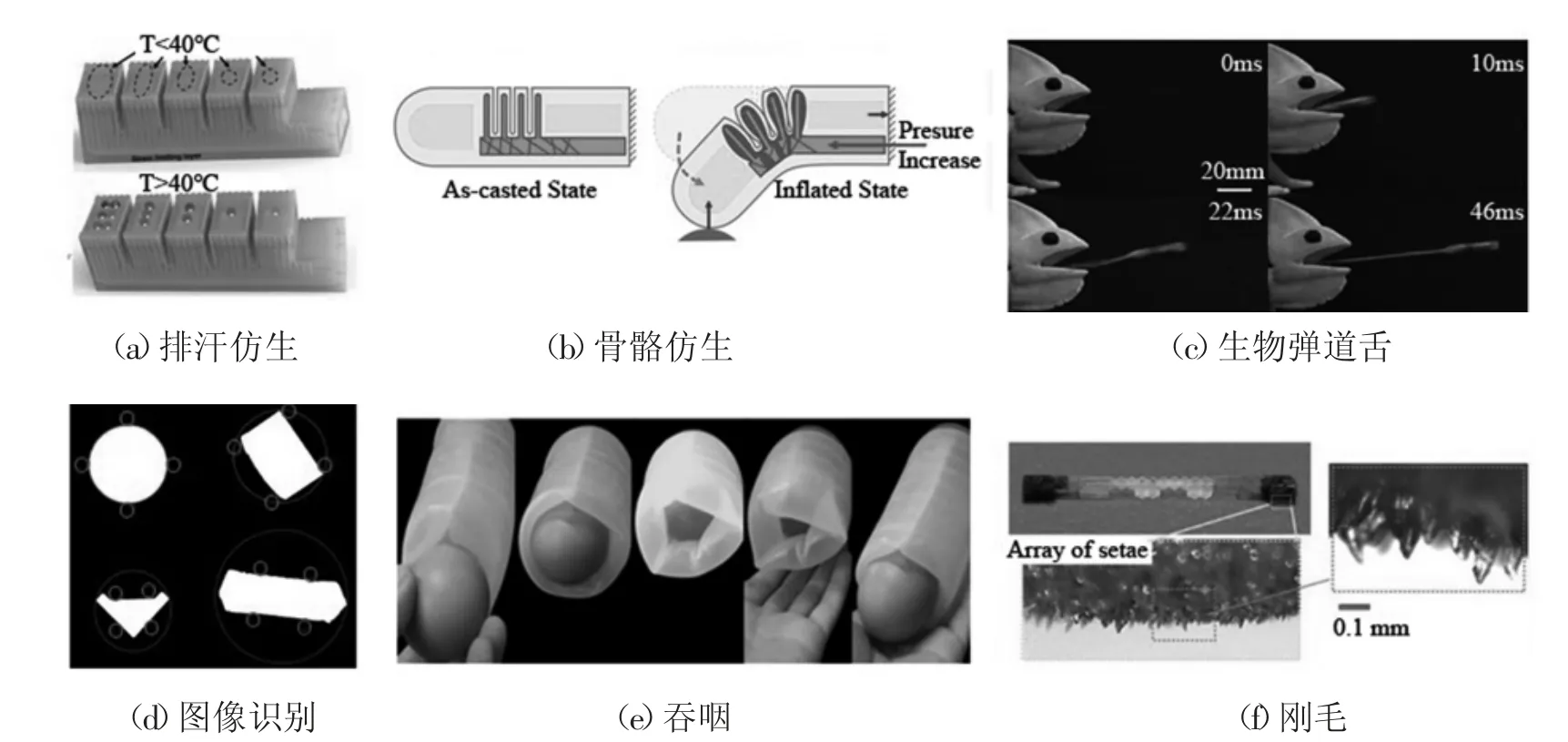
圖3 典型功能仿生圖
4.1 排汗
與金屬不同,許多彈性體系統在環境溫度下具有更高的熱膨脹系數和更低的導熱系數,因此更加需要穩定的工作溫度。通過模擬生物排汗的功能,可以實現軟機器人在高溫環境下的溫度穩定。Mishra等[14]利用多材料立體光刻技術,3D打印了手指狀流體彈性體致動器,其具有聚-N-異丙基丙烯酰胺(PNIPAm)主體,其上覆蓋有微孔(約200μm)聚丙烯酰胺(PAAm)背層。在低溫(<30℃)下,孔隙充分閉合以允許加壓和驅動,而在高溫(>30℃)下,孔隙擴張以允許液壓致動器中的局部出汗。與類似的非出汗裝置相比,此類出汗致動器的冷卻速率提高了600%。
4.2 骨骼
骨骼化是生物結構復雜化的基礎,功能是運動、支持和保護身體。在軟機器人中加入骨骼結構,有利于力的傳遞,增加軟機器人運動的穩定性。Preechayasomboon等[15]通過在軟機器人內部加入空心的硬質材料,不僅可以起到骨骼的作用,還降低了軟機器人的重量。
4.3 生物彈道舌
目前,軟機器人的抓取速度都比較緩慢,且通常只能抓取靜止的物體。Kan等[16]模仿蜥蜴等動物的彈射舌,通過電磁彈射,實現了非常快速的抓取功能。但是這個軟機器人只能發射,無法將發射的結構再次收回。
4.4 圖像識別
視力是人類獲取信息最主要的感官,當我們抓取一個物體時,通常會根據看到的物體形狀,調整我們的抓握策略。Huang等[17]通過圖像識別,判斷需要抓取的物體形狀。再通過神經網絡,將圖像數據作為輸入,輸出抓取模式,從而設定軟機器手的各個參數。
4.5 吞咽
吞咽是動物與外界環境相互作用的重要方式,可以有效地捕獲目標,并保持目標的完整性,也可以給吞咽物體提供有效的保護。Li等[18]設計了一個軟體吞咽機器人,可以吞咽小型物體,或者將吞咽的物體吐出。通過向軟機器人內部充水或空氣,可以給吞咽的物體提供保護。
4.6 剛毛
在自然界中,很多生物群體都進化出了剛毛的結構。這些動物不需要爪子或腿用力,也可以在超光滑的傾斜甚至倒轉的表面上行走。當剛毛的底部與任何基質接觸時,由于接觸點處的范德華力而產生粘附,摩擦和粘附取決于與表面接觸的剛毛數量和接觸面的面積。Joyee等[19]研究發現,機器人腳墊的毛狀附著力和工程疏水性使其能夠在濕滑的環境中進行穩健的導航。他們設計的軟機器人可以在濕滑的表面上行動。
5 仿生軟機器人的現狀與挑戰
目前,絕大部分的仿生軟機器人仍然在實驗階段,很少有實際的應用。在工業上,軟機器人夾持器可以更好地貼合物品,抓取易碎或不規則物品。在醫療領域,軟機器人已經可以用于輔助運動或術后復健[20]。此外,軟機器人潛在的應用還包括水下探索、藥物輸運和腸鏡等。
但是軟機器人目前仍然有很多的問題需要解決。受制于傳感器和驅動等問題,目前絕大部分軟機器人都不能實現遠程控制,活動范圍受到氣管或電線的限制。此外,軟機器人身體和傳統的剛性電子設備之間的連接在物理上是脆弱的,容易斷裂。在將來,仍需要材料學的發展,并對軟機器人的控制進一步研究,才能真正將軟機器人推向實用。
猜你喜歡
天天愛科學(2022年9期)2022-09-15 01:12:54
天天愛科學(2022年4期)2022-05-23 12:41:48
當代水產(2022年3期)2022-04-26 14:26:56
哲學評論(2021年2期)2021-08-22 01:53:34
航空世界(2020年10期)2020-01-19 14:36:20
中華詩詞(2019年7期)2019-11-25 01:43:04
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
