桁架式虹吸吸泥機走偏問題分析及解決措施
2022-03-10 01:45:16呂季軒
設備管理與維修 2022年1期
呂季軒
(西安市自來水有限公司,陜西西安 710038)
0 引言
自來水廠平流沉淀池常采用桁架式虹吸吸泥機作為排泥設備,這種吸泥機具有操作方便、排泥比較可靠、便于實現自動化等優點,近幾年來廣泛用于平流沉淀池的排泥。但在生產實踐中存在一些問題,其中,由于桁架跨距較大,行走長度長,在導軌面上會出現車輪走偏問題,車輪的走偏會導致啃軌及脫軌等嚴重后果,因此有必要對虹吸式吸泥機車輪走偏問題進行探討。
1 桁架式虹吸吸泥機走偏概況
本文以雙邊驅動式吸泥機為研究對象,雙邊驅動式吸泥機驅動輪分別由獨立的驅動裝置驅動,包括電機和減速機等,兩側驅動裝置均以相同的機件組成,并且要求同步運行。虹吸式吸泥機車輪踏面采用圓柱形雙輪緣鑄鋼車輪,由4 點支撐行走大梁橫跨在平流式沉淀池上,池兩邊均鋪設鋼軌,從沉淀池的一端運行到另一端,邊行走邊吸泥,出現吸泥機走偏或者啃軌現象的主要原因有以下5 點:
(1)電機及減速機故障,導致兩側車輪轉速不同步。
(2)吸泥機池下結構件與池底、池壁或集水槽等構筑物發生碰撞摩擦。
(3)水下有雜物或兩側配水不均。
(4)行走輪安裝誤差及磨損嚴重。(5)軌道安裝誤差超標或者池體變形導致軌道變形超標。
分析上述5 點原因,引起車輪走偏的原因可以概括為兩類,一類是由于電機或者減速器不同步,或者外力分布不均勻,引起兩側車輪行走速度不同而導致車輪的走偏,這種情況可以看作是運動誤差引起的車輪走偏,前三點歸為此類;另一類是由于行走車輪安裝誤差、導軌變形、導軌的制造裝配誤差等原因引起的車輪走偏,這種情況可以看作是幾何誤差引起的車輪走偏,后兩點可以歸為此類。對于吸泥機的運動誤差,往往先測量電機和減速機轉速,再停機后人為調整車輪的行走偏差[1]。對于吸泥機的幾何誤差,往往是測量跨度偏差、軌距偏差、對角線偏差和車輛輪徑后,人為對軌道或吸泥機偏斜角度進行調整[2],這些方法均耗時費力。本文針對電機轉速不同步產生的運動誤差及車輪、軌道裝配誤差引起的幾何誤差,提出了改進的校正方法。
2 運動誤差分析及校正
運動誤差是指按照某一事先設定的運動學關系進行相對運動部件間的相對運動誤差。在吸泥機運行過程中,電機及傳動機構等不同步最終導致吸泥機運動不到位產生運動誤差。對于兩側電機及傳動機構轉速差引起的偏轉,可以在車輪行走方向前方內測,布置高精度壓力傳感器,由于傳感器位置比輪沿靠內,如圖1 所示,當車輪有偏移趨勢后,壓力傳感器首先接觸軌道,采集到壓力信號后,通過PLC 進行變頻調速,抵消兩側速度差,實現車輪走偏的校正。當左側壓力傳感器檢測到壓力信號后,左側驅動電機停止運行,右側行走輪繼續前進;當左側壓力傳感器無壓力信號時,停止右側的驅動電機。為了保證糾偏的可靠性,變頻器應具有穩定、可靠、功能性強、響應時間快、同步精度高等特點,因此應選用高精度變頻器。
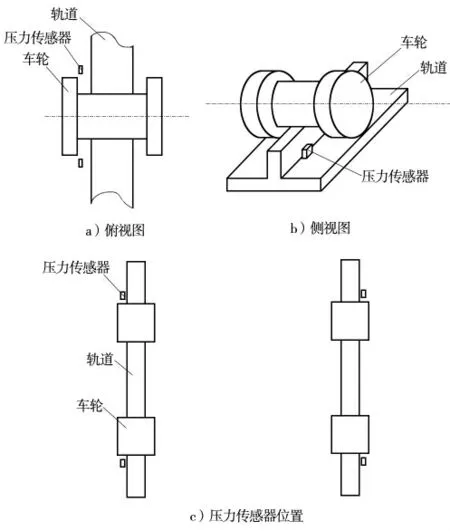
圖1 壓力傳感器布置示意
3 幾何誤差分析及校正
幾何誤差是吸泥機輪軌本身的制造和裝配不完善產生的誤差,包括直線軸和旋轉軸的誤差,將吸泥機看作一剛體,剛體在空間直線運動中,存在6 個自由度,通過坐標變換原理可得到其誤差數學模型。
假設導軌方向為X 軸向,在水平面內,與X 軸向垂直的即Y 軸向,豎直面內與X、Y 軸向均垂直的為Z 軸向。吸泥機沿軌道行走,即沿X 軸行走,其在X 軸的偏移,用符號δx(x)。由于導軌系統制造、安裝的不完善,車輪在X 向運動時,其實際運動軌跡可能偏離直線,它包括在Y 方向的偏移δy(x)和Z 方向的偏移δz(x),下角標表示誤差運動的方向。同樣,由于導軌的不完善,會使車輪在沿導軌的直線運動過程中,產生繞三根軸回轉的轉角誤差δx(x),δy(x),δz(x)。ε 表示轉角誤差,下標x、y、z 分別表示轉軸的方向,括號內的x 表示車輪沿X 方向運動。如圖2 所示。
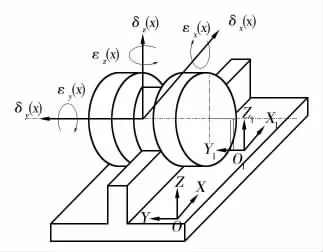
圖2 車輪的幾何誤差
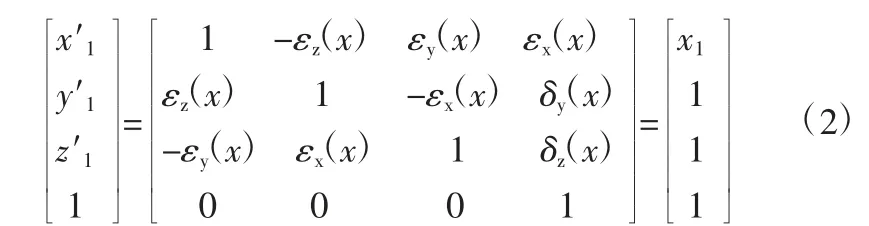
在軌道基座上建立原始坐標系O-XYZ,在吸泥機車輪上建立O1-X1Y1Z1,吸泥機啟動前,設兩個坐標系是重合的,吸泥機朝X 軸向運動。吸泥機位移誤差特征變換矩陣為:

吸泥機沿X 軸運動距離X1后,應到達點(X1,1,1),但由于幾何誤差的存在,其運動的終點是(x1′、y1′、z1′),其位移變換矩陣為:
將式(2)展開,可得:

式(3)~式(5)表示在幾何誤差作用下車輪的實際坐標。由于車輪走偏主要是Y 向偏移,最終吸泥機行走過程中的幾何誤差可表述為線性方程:

通過式(6)可以計算出車輪在Y 方向的偏移量。
運用傳感器采集到車輪行走數據,通過誤差項公式,借助PLC 控制模塊插補計算和校正執行機構進行誤差補償,實現吸泥機走偏校正,檢測周期設定為每經過2 min 自動檢測一次,通過補償,保證車輪沿軌道行走的軸向偏角保持在很小的范圍內,實現對吸泥機走偏的校正,從而減少事故發生的概率。
4 結語
通過分析可知,吸泥機走偏和啃軌的原因是由運動誤差或者幾何誤差造成,為了避免啃軌產生嚴重的后果,分析產生運動誤差和幾何誤差的原因,建立了相應的幾何誤差數學模型,通過PLC、高精度變頻器調整電機轉速和插補計算后進行誤差補償的方法對吸泥機進行糾偏,相對于人為糾偏,該方法大大提高了吸泥機糾偏效率。
