輪腿式爬壁機器人的永磁吸附裝置設計與優化
2022-03-10 02:58:12鐘道方張明路
工程設計學報 2022年1期
鐘道方,田 穎,張明路
(河北工業大學機械工程學院,天津 300401)
石油化工儲罐和船舶均為大型金屬立面結構。針對此類立面的除銹、噴漆和檢測等維護作業[1-2],國內外學者研制了多種爬壁機器人,輔以相應的先進作業工藝,利用它們代替人工來完成上述高危作業[3-4]。爬壁機器人的吸附能力是其在大型立面上靈活運動及越障的基礎。目前,大型爬壁機器人的吸附方式主要有負壓吸附和永磁吸附兩種。其中:負壓吸附具有受限于能耗、噪音大和功率小的缺點,不適用于大負載作業情況[5];而永磁吸附具有可靠性高、能耗低和結構簡單的優點,相比于負壓吸附,其為爬壁機器人較常采用的吸附方式[6]。
Tavakoli、宋偉等[7-8]所研制的爬壁機器人的磁吸附裝置安裝在車輪上,其可提供一定的磁吸附力來承受機器人整體的重量。Nagaya、崔宗偉等[9-10]設計的檢測爬壁機器人采用分體式移動機構與磁吸附裝置相結合的方式,能夠在類似于單一曲面的立面上進行爬壁運動。Xu等[11]通過集輪式運動和永磁吸附于一體,研制了用于船舶除銹的噴砂爬壁機器人,同時利用加載實驗驗證了該機器人的車輪能夠承受120 kg的有效載荷。閆晨飛等[12-13]基于永磁吸附技術研制了一種變磁化方向單元組合式永磁吸附裝置,其可增強爬壁機器人的吸附能力。趙軍友等[14]研究了爬壁機器人磁吸附單元的尺寸參數與其磁吸附力的關系,并在此基礎上設計并優化了其輔助吸盤的尺寸參數,以保證機器人可穩定地吸附在油罐壁面上。但是,上述爬壁機器人均采用履帶或輪式移動方式,由于這些移動方式多采用車輪與磁吸附裝置相結合的模式,使得機器人無法翻越較高的障礙,限制了其應用場合。
針對常見爬壁機器人越障能力較弱的問題,筆者以輪腿式爬壁機器人為研究對象,結合其越障原理以及永磁吸附原理,設計了一種基于非接觸式永磁吸附單元磁極交叉的線性陣列結構,即非接觸式永磁吸附裝置。通過有限元仿真對該永磁吸附裝置的磁感應強度和磁吸附力進行分析計算,并分析不同結構參數對其磁吸附力的影響,旨在為輪腿式爬壁機器人磁吸附裝置的設計與優化奠定基礎。
1 永磁吸附裝置設計
永磁吸附是基于磁通的連續性原理及磁場的疊加原理實現的。本文將永磁吸附的磁路設計成多個磁系,通過不同磁極(N極與S極)的交叉設計來實現工作磁極面上連續磁感應線的形成,且每2個磁極通過氣隙與吸附壁面形成類似于U形的磁鐵,同時永磁吸附單元產生的磁力線與攏磁材料、鋼制壁面形成有效的封閉磁回路,達到穩定吸附的目的。本文所設計的永磁吸附裝置中的磁路排布方式采用N極對S極、S極對N極的交叉排列方式,永磁吸附單元上方為攏磁材料,用于增強對鋼制壁面的吸附,使之形成封閉磁回路,以減少漏磁。輪腿式爬壁機器人通過3組車輪的依次提升來實現移動越障功能,其越障原理如圖1(a)所示。在機器人移動過程中,應至少保證2組車輪與鋼制壁面接觸,最大越障高度為100 mm。永磁吸附裝置安裝在每組車輪中間的橫梁上,如圖1(b)所示。永磁吸附裝置與鋼制壁面之間的工作氣隙可通過在裝置與車輪橫梁之間加減墊片或對輪胎充氣來進行優化調整。與傳統的磁輪吸附相比,所設計的非接觸式永磁吸附裝置可保證機器人在越障時不會因磁吸附力不足而產生傾覆后翻的現象,故其磁能利用率較高。

圖1 輪腿式爬壁機器人的越障原理及永磁吸附裝置的安裝位置示意Fig.1 Obstacle-surmounting principle of wheel-legged wallclimbing robot and installation position of permanent magnet adsorption device
在永磁吸附裝置長度不變的基礎上,結合磁回路閉合原理,根據相鄰永磁吸附單元之間以及兩側永磁吸附單元外側是否有攏磁材料或隔磁材料,得到不同永磁吸附裝置的二維磁路原理[15],如圖2所示,其中箭頭方向為永磁吸附單元的充磁方向。現分別對相鄰永磁吸附單元之間有攏磁材料或隔磁材料和無材料(兩側永磁吸附單元外側有擾磁材料)以及所有永磁吸附單元兩側均無材料等4種永磁吸附裝置設計方案進行對比分析。

圖2 4種永磁吸附裝置的二維磁路設計原理Fig.2 Two-dimensional magnetic circuit design principle of four permanent magnet adsorption devices
4種永磁吸附裝置設計方案均采用徑向充磁,區別在于永磁吸附單元兩側是否有攏磁材料或隔磁材料,其中攏磁材料為導磁軛鐵,隔磁材料為鋁合金。為了驗證上述4種設計方案的可行性,利用Ansoft Maxwell軟件分別對4種永磁吸附裝置進行磁力仿真分析,其中鋼制壁面的半徑為10 m,結果如圖3所示。

圖3 4種永磁吸附裝置的磁力線分布Fig.3 Distribution of magnetic field lines of four permanent magnet adsorption devices
通過Ansoft Maxwell軟件仿真得到的4種永磁吸附裝置的磁感應強度和磁吸附力如表1所示。由表1可知,圖2(a)、圖2(c)所示的永磁吸附裝置外側有攏磁材料,其與鋼制壁面形成封閉的磁回路,相比于圖2(d)所示的裝置更能減少漏磁現象的發生;圖2(c)所示永磁吸附裝置的磁感應強度比圖2(b)的略大,但其磁吸附力相同,而圖2(d)所示永磁吸附裝置的磁感應強度明顯比圖2(b)、圖2(c)的大,但其對鋼制壁面的磁吸附力較小。由于永磁吸附裝置安裝在輪腿式爬壁機器人前、中、后位置的底側,須考慮機器人自身的重量以及遇到障礙時車輪依次抬升的情況,最終選擇相鄰永磁吸附單元之間無材料的設計方案,即圖2(c)所示裝置。
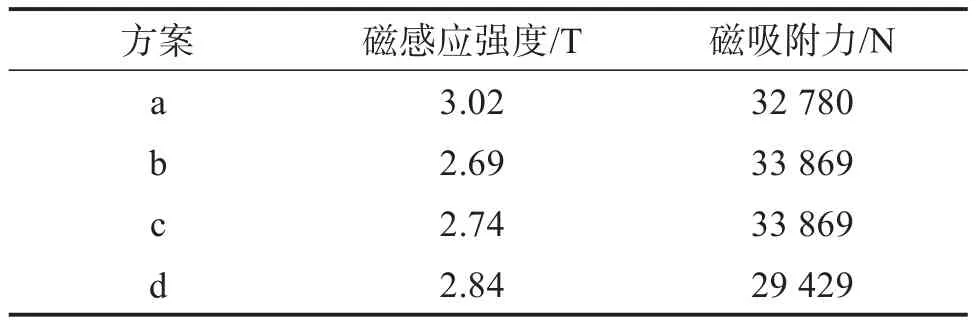
表1 4種永磁吸附裝置的磁感應強度和磁吸附力對比Table 1 Comparison of magnetic induction intensity and magnetic absorption force of four permanent magnet adsorption devices
2 永磁吸附裝置受力分析
根據靜態磁場理論可知,導磁材料在靜態磁場中受到磁力的作用。對于本文所設計的永磁吸附裝置,其產生的磁吸附力可看作靜態磁場對鋼制壁面的磁力作用,則其永磁吸附單元的磁場能量Wm可表示為:

式中:V為磁場分布空間(B≠0 T);B為磁極表面的磁感應強度;H為磁場強度。
進一步對磁場能量求導,可求得永磁吸附單元產生的磁吸附力F:

式中:S為永磁吸附單元與鋼制壁面之間的工作氣隙面積;u0為空氣的磁導率。
從式(2)中可以看出,在實際計算永磁吸附單元產生的磁吸附力時未考慮工作氣隙中的磁場,因此利用式(2)計算磁吸附力時存在一定的誤差。當單個永磁吸附單元與鋼制壁面存在一定氣隙時,須計算鋼制壁面的磁感應強度Bg。由于鋼制壁面的曲率較小,如圖4所示(圖中:D、W和A分別為永磁吸附單元的長度、寬度和高度,X為永磁吸附單元表面中心點與鋼制壁面的距離[16],即工作氣隙),此時鋼制壁面的磁感應強度Bg為:

圖4 永磁吸附單元對鋼制壁面的吸附示意Fig.4 Schematic diagram of adsorption of permanent magnet adsorption unit to steel wall
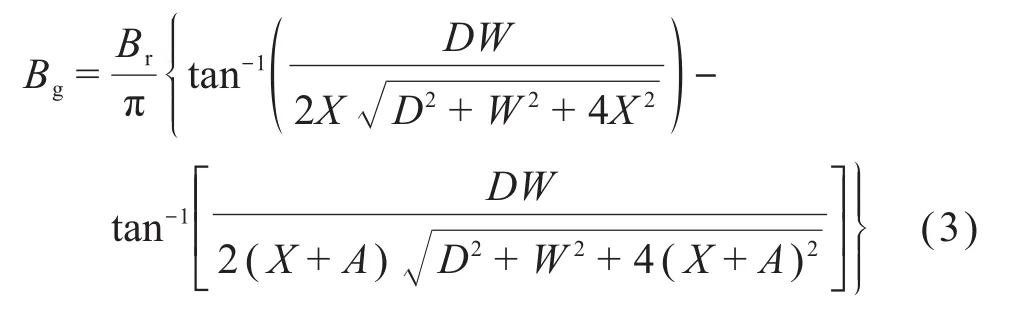
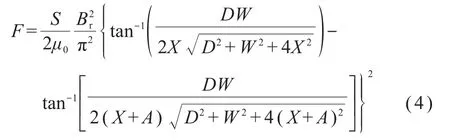
式中:Br為釹鐵硼永磁吸附單元的磁感應強度,Br=1.25 T。
故隨著工作氣隙的變化,永磁吸附單元產生的磁吸附力F為:
結合立面作業對爬壁機器人吸附功能的要求,對輪腿式爬壁機器人進行受力分析,如圖5所示。

圖5 輪腿式爬壁機器人受力分析Fig.5 Force analysis of wheel-legged wall-climbing robot
由圖5可知,輪腿式爬壁機器人受重力G,鋼制壁面對車輪的支持力FN1、FN2、FN3,摩擦力Ff1、Ff2、Ff3以及3個永磁吸附裝置產生的磁吸附力Fm1、Fm2、Fm3的作用,則可得:

式中:FT為爬壁機器人的牽引力;s為車輪安全系數;μ為爬壁機器人車輪與鋼制壁面之間的靜摩擦系數。
由式(5)可得,各永磁吸附裝置產生的磁吸附力為:

由式(4)和式(6)可知,永磁吸附裝置對鋼制壁面的磁吸附力的主要影響因素有永磁吸附單元的長度D、寬度W和高度A以及工作氣隙X。此外,由于輪腿式爬壁機器人在鋼制壁面上進行維護作業且其永磁吸附單元以磁極交叉的方式排布,故相鄰永磁吸附單元氣隙C,鋼制壁面的厚度E、半徑R以及攏磁材料厚度K對磁吸附力也存在一定的影響。對不同結構參數下永磁吸附裝置的磁吸附力變化規律進行分析,可為輪腿式爬壁機器人的輕量化設計提供依據。
3 永磁吸附裝置的仿真分析與結構參數優化
3.1 三維建模仿真
為了更符合實際應用的要求,以半徑為10 m的石油化工儲罐為建模基礎,對永磁吸附裝置進行結構參數優化設計。圖6所示為永磁吸附裝置的三維結構示意。圖中:L為永磁吸附單元上方擾磁材料的截面長度,δ為外側擾磁材料的截面寬度。

圖6 永磁吸附裝置結構示意Fig.6 Structure diagram of permanent magnet adsorption device
對永磁吸附裝置進行仿真建模時,攏磁材料采用導磁軛鐵,儲罐鋼制壁面材料采用Q235,永磁吸附單元材料采用釹鐵硼(NdFeB-N35),其導磁率約為1.099 8;相鄰永磁吸附單元間隙及其與鋼制壁面之間的工作氣隙內均為空氣。所構建的永磁吸附裝置吸附鋼制壁面的三維仿真模型如圖7所示。
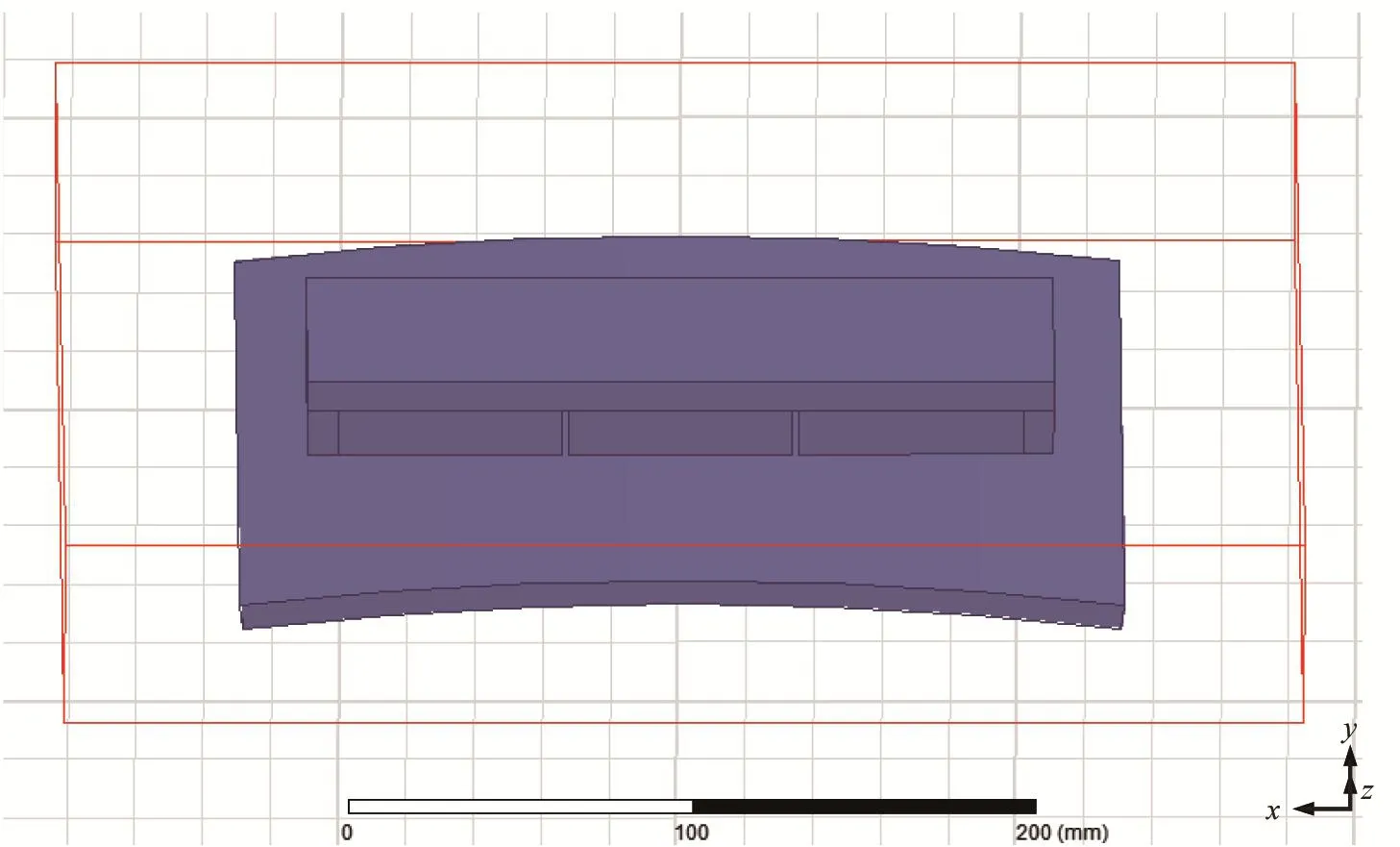
圖7 永磁吸附裝置吸附鋼制壁面的三維仿真模型Fig.7 Three-dimensionalsimulation modelofpermanent magnet adsorption device adsorbing steel wall
3.2 結構參數優化
基于控制變量法的原理,設置永磁吸附單元上方擾磁材料的截面長度L=220 mm,外側擾磁材料的截面寬度δ=10 mm,通過改變不同的結構參數,得到不同條件下永磁吸附裝置對鋼制壁面的磁吸附力的變化規律,從而獲得適用于不同重量輪腿式爬壁機器人的永磁吸附裝置的結構參數最優解。
3.2.1 工作氣隙對磁吸附力的影響
在圖7所示的三維仿真模型中,取D=66 mm,W=60 mm,A=16 mm,E=8 mm,C=2 mm,K=10 mm,R=10 m,對工作氣隙X進行優化設計。取X=0~9 mm,通過仿真分析和直線擬合處理得到X對永磁吸附裝置磁吸附力的影響,結果如圖8所示。
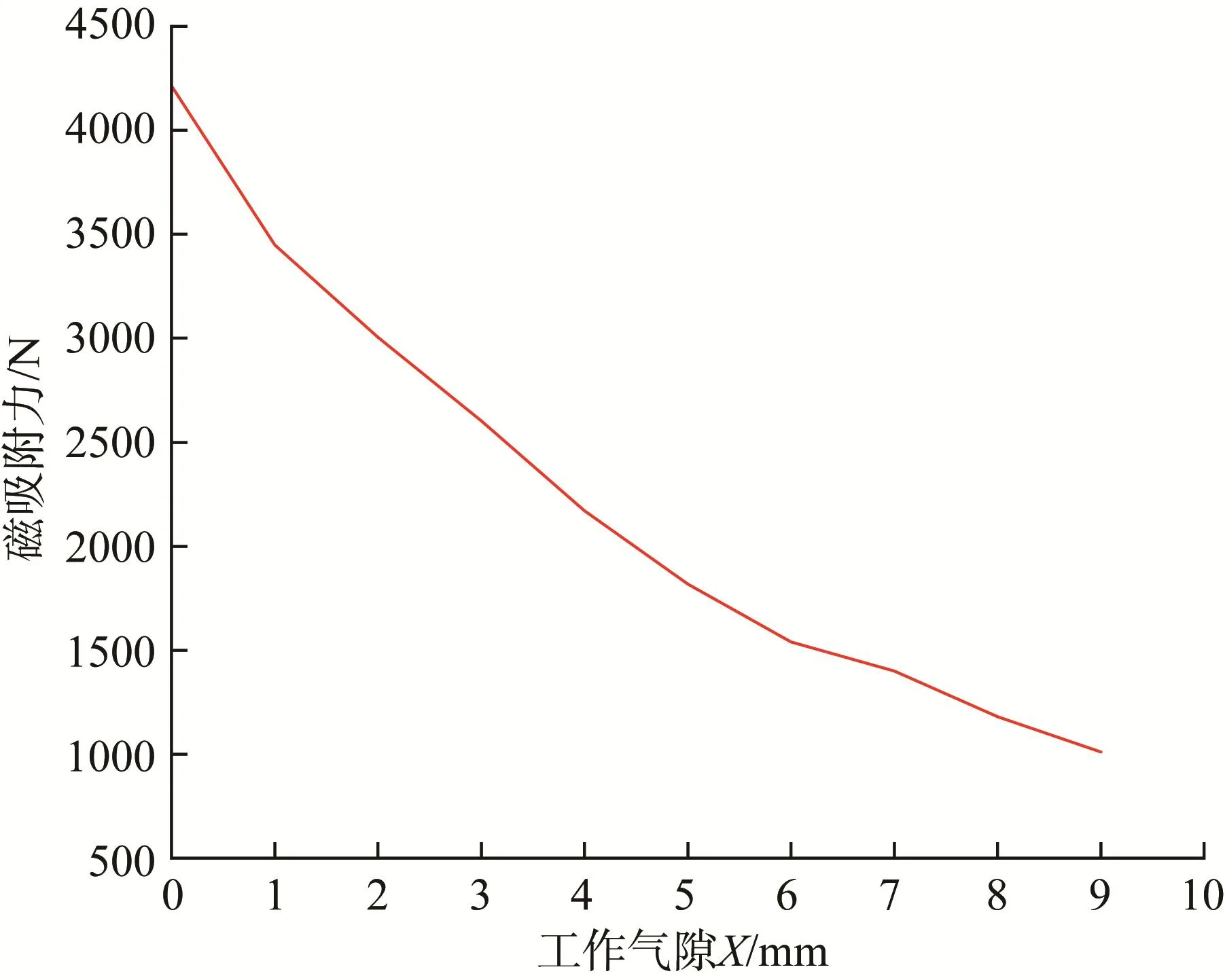
圖8 工作氣隙對永磁吸附裝置磁吸附力的影響Fig.8 Influence of working air gap on magnetic adsorption force of permanent magnet adsorption device
由圖8可知,隨著工作氣隙X的增大,永磁吸附裝置的磁吸附力呈減小趨勢;當永磁吸附裝置與鋼制壁面無氣隙(即X=0 mm)時,其磁吸附力最大。結果表明,當相鄰永磁吸附單元、擾磁材料與鋼制壁面形成并聯磁回路時,工作氣隙越大,其形成的磁回路越大,則從氣隙中漏磁的現象越嚴重,從而導致永磁吸附裝置對鋼制壁面的磁吸附力隨之減小。因此,在實際應用中,在保證磁吸附力足以承受爬壁機器人重量的前提下,應盡量減小永磁吸附裝置與鋼制壁面的距離。
3.2.2 相鄰永磁吸附單元間隙對磁吸附力的影響
同理,取 D=66 mm,W=60 mm,A=16 mm,E=8 mm,X=2 mm,K=10 mm,R=10 m,對相鄰永磁吸附單元間隙C進行優化設計。取C=0~9 mm,通過仿真分析和直線擬合處理得到C對永磁吸附裝置磁吸附力的影響,結果如圖9所示。
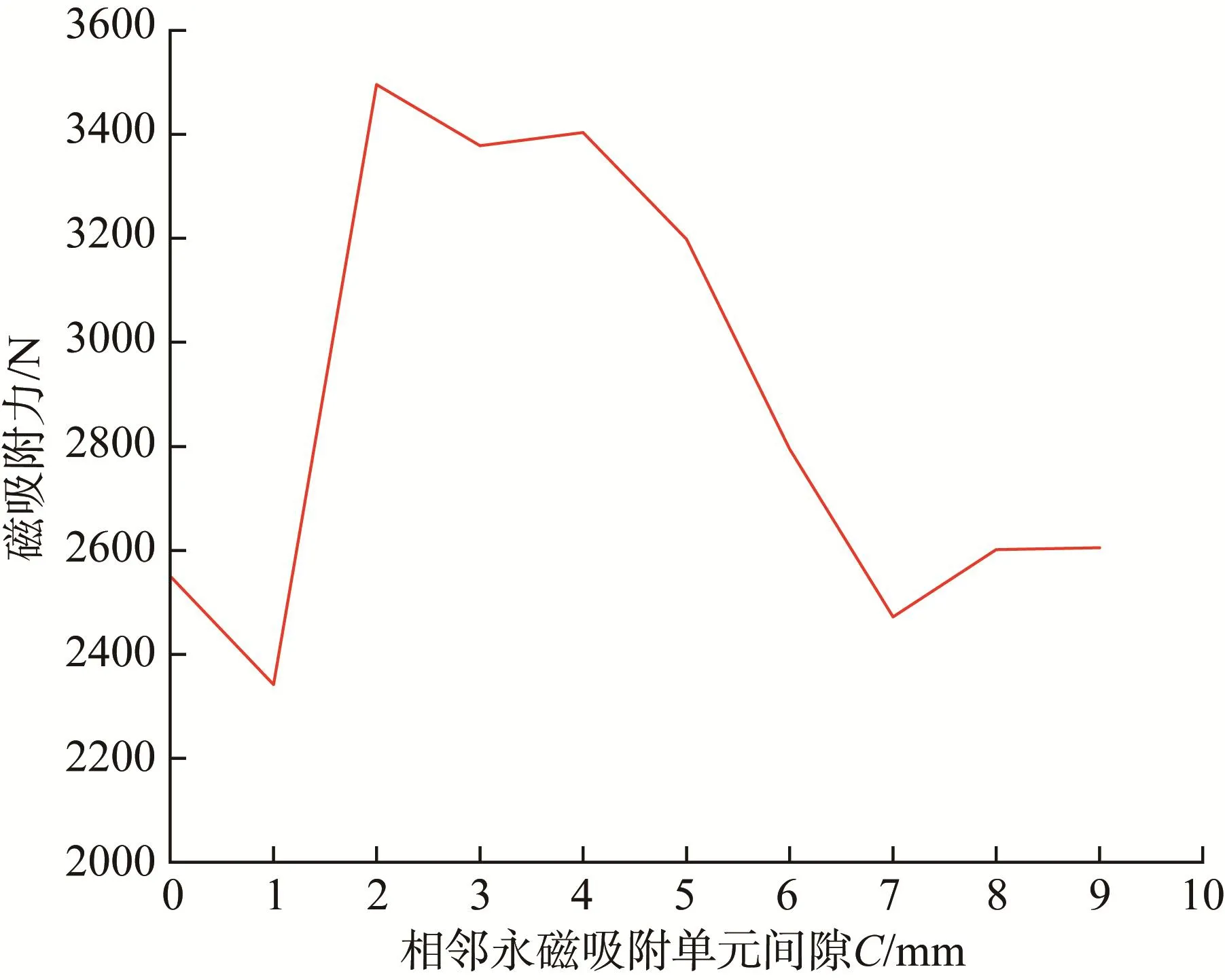
圖9 相鄰永磁吸附單元間隙對永磁吸附裝置磁吸附力的影響Fig.9 Influence of gap between adjacent permanent magnet adsorption units on magnetic adsorption force of permanent magnet adsorption device
圖9所示曲線出現了波峰,說明當相鄰永磁吸附單元間隙C=2 mm時,永磁吸附裝置的磁吸附力達到最大。這是因為當相鄰永磁吸附單元不存在間隙時,永磁吸附單元、擾磁材料與鋼制壁面形成的是單一的磁回路,而非并聯磁回路,此時較少的磁力線穿過鋼制壁面;而當間隙過大時,漏磁現象嚴重,導致永磁吸附裝置對鋼制壁面的磁吸附力大大減小。由此可得,當C=2~4 mm時,磁吸附力的利用率較高。
3.2.3 永磁吸附單元長度對磁吸附力的影響
同理,取W=60 mm,A=16 mm,E=8 mm,C=X=2 mm,K=10 mm,R=10 m,對永磁吸附單元長度D進行優化設計。取D=25~200 mm,通過仿真分析和直線擬合處理得到D對永磁吸附裝置磁吸附力的影響,結果如圖10所示。

圖10 永磁吸附單元長度對永磁吸附裝置磁吸附力的影響Fig.10 Influence of permanent magnet adsorption unit length on magnetic adsorption force of permanent magnet adsorption device
圖10所示曲線出現波峰,說明當永磁吸附單元長度D=60~70mm時,即永磁吸附單元的數量為3~5個時,永磁吸附裝置的磁吸附力達到最大。在相鄰永磁吸附單元間隙不變的情況下,當永磁吸附單元較長時,永磁吸附單元、擾磁材料與鋼制壁面之間形成的閉合磁回路較大,對于一定厚度的鋼制壁面和擾磁材料會產生一定的漏磁現象;當永磁吸附單元達到一定長度時,磁感應線不是遵循原來的途徑返回,而是沿著比原先路徑稍高的曲線返回,這會導致D>65 mm后永磁吸附裝置的磁吸附力呈下降趨勢。在實際應用中,可適當增加永磁吸附單元的長度,以增大磁通量,從而抵消一部分經由相鄰永磁吸附單元間隙泄漏的磁通。
3.2.4 永磁吸附單元寬度對磁吸附力的影響
同理,取D=66 mm,A=16 mm,E=8 mm,C=X=2 mm,K=10 mm,R=10 m,對永磁吸附單元寬度W進行優化設計。取W=40~90 mm,通過仿真分析和直線擬合處理得到W對永磁吸附裝置磁吸附力的影響,結果如圖11所示。

圖11 永磁吸附單元寬度對永磁吸附裝置磁吸附力的影響Fig.11 Influence of permanent magnet adsorption unit width on magnetic adsorption force of permanent magnet adsorption device
由圖11可知,永磁吸附裝置的磁吸附力在永磁吸附單元寬度W=40~90 mm時呈遞增趨勢。這是因為在永磁吸附單元寬度增加的同時,其與鋼制壁面之間的工作氣隙面積也隨之增大,使得工作氣隙中的磁通量無法達到飽和狀態,從而導致磁吸附力一直呈增大狀態。
3.2.5 永磁吸附單元高度對磁吸附力的影響
同理,取D=66 mm,W=60 mm,E=8 mm,C=X=2 mm,K=10 mm,R=10 m,對永磁吸附單元高度A進行優化設計。取A=8~16 mm,通過仿真分析和直線擬合處理得到A對永磁吸附裝置磁吸附力的影響,結果如圖12所示。

圖12 永磁吸附單元高度對永磁吸附裝置磁吸附力的影響Fig.12 Influence of permanent magnet adsorption unit height on magnetic adsorption force of permanent magnet adsorption device
由圖12可知,永磁吸附裝置的磁吸附力隨永磁吸附單元高度A(8~15 mm)的增加呈遞增趨勢;當A=9~10 mm時,永磁吸附裝置的磁吸附力增大較快,最后趨于飽和狀態。在永磁吸附裝置與鋼制壁面之間的工作氣隙不變的情況下,增加永磁吸附單元高度可使其磁通量增加,從而使工作氣隙中的磁通量不斷趨近于飽和狀態,則磁吸附力最終達到穩定狀態。
3.2.6 擾磁材料厚度對磁吸附力的影響
同理,取 D=66 mm,W=60 mm,A=16 mm,E=8 mm,C=X=2 mm,R=10 m,對擾磁材料厚度K進行優化設計。取K=4~10 mm,通過仿真分析和直線擬合處理得到K對永磁吸附裝置磁吸附力的影響,結果如圖13所示。
由圖13可知,永磁吸附裝置的磁吸附力隨擾磁材料厚度K的增加而增大,最后趨于飽和狀態。這是因為當擾磁材料較薄(即K較小)時,永磁吸附單元所產生的磁通密度大于擾磁材料的飽和磁通密度,則永磁吸附裝置的漏磁量增大,使得通過鋼制壁面的磁通量減少,從而導致磁吸附力減小;當擾磁材料達到一定厚度時,通過擾磁材料的磁回路保持穩定,其厚度的增大對磁吸附力的影響不再明顯。

圖13 擾磁材料厚度對永磁吸附裝置磁吸附力的影響Fig.13 Influence of magnetic disturbing material thickness on magnetic adsorption force of permanent magnet adsorption device
3.2.7 鋼制壁面厚度對磁吸附力的影響
同理,取D=66 mm,W=60 mm,A=16 mm,C=X=2 mm,K=10 mm,R=10 m,對鋼制壁面厚度E進行優化設計。取E=4~15 mm,通過仿真分析和直線擬合處理得到E對永磁吸附裝置磁吸附力的影響,結果如圖14所示。

圖14 鋼制壁面厚度對永磁吸附裝置磁吸附力的影響Fig.14 Influence of steel wall thickness on magnetic adsorption force of permanent magnet adsorption device
由圖14可知,永磁吸附裝置的磁吸附力隨鋼制壁面厚度E的增加而增大,最后趨于飽和狀態。當鋼制壁面較薄(即E較小)時,永磁吸附單元所產生的磁回路穿透鋼制壁面,永磁吸附裝置的漏磁量增大,導致磁吸附力減小;當鋼制壁面達到一定厚度時,穿過鋼制壁面的磁力線達到飽和,則其厚度變化對磁吸附力的影響不再明顯。
3.2.8 鋼制壁面半徑對磁吸附力的影響
考慮到實際應用中儲罐鋼制壁面的半徑不同,結合上文得到的各結構參數的最優解,即D=66 mm,W=60 mm,A=15 mm,E=8 mm,C=X=2 mm,K=6 mm,對鋼制壁面半徑R進行優化設計。取R=5~10 m,通過仿真分析和直線擬合處理得到R對永磁吸附裝置磁吸附力的影響,結果如圖15所示。
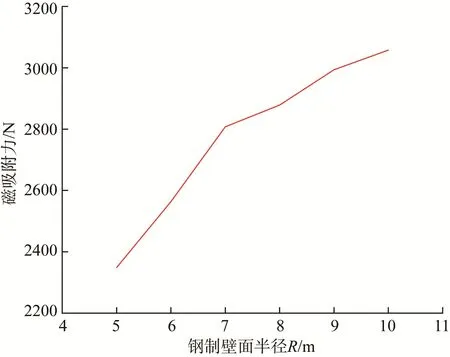
圖15 鋼制壁面半徑對永磁吸附裝置磁吸附力的影響Fig.15 Influence of steel wall radius on magnetic adsorption force of permanent magnet adsorption device
由圖15可知,永磁吸附裝置的磁吸附力隨鋼制壁面半徑的增大而增大。這是因為當鋼制壁面半徑增大時,其相應的曲率隨之減小,而扇形壁面更接近平面,即永磁吸附裝置與鋼制壁面之間的距離分布得更加均勻,則在工作氣隙處的漏磁現象減少,從而使得對鋼制壁面的磁吸附力增大。圖16所示為R=10 m時永磁吸附裝置的磁場強度分布云圖。由圖16可知,當相鄰永磁吸附單元形成完整的磁回路并呈并聯式分布時,其間隙處的磁場強度較大,且永磁吸附單元下側的磁場強度最大。
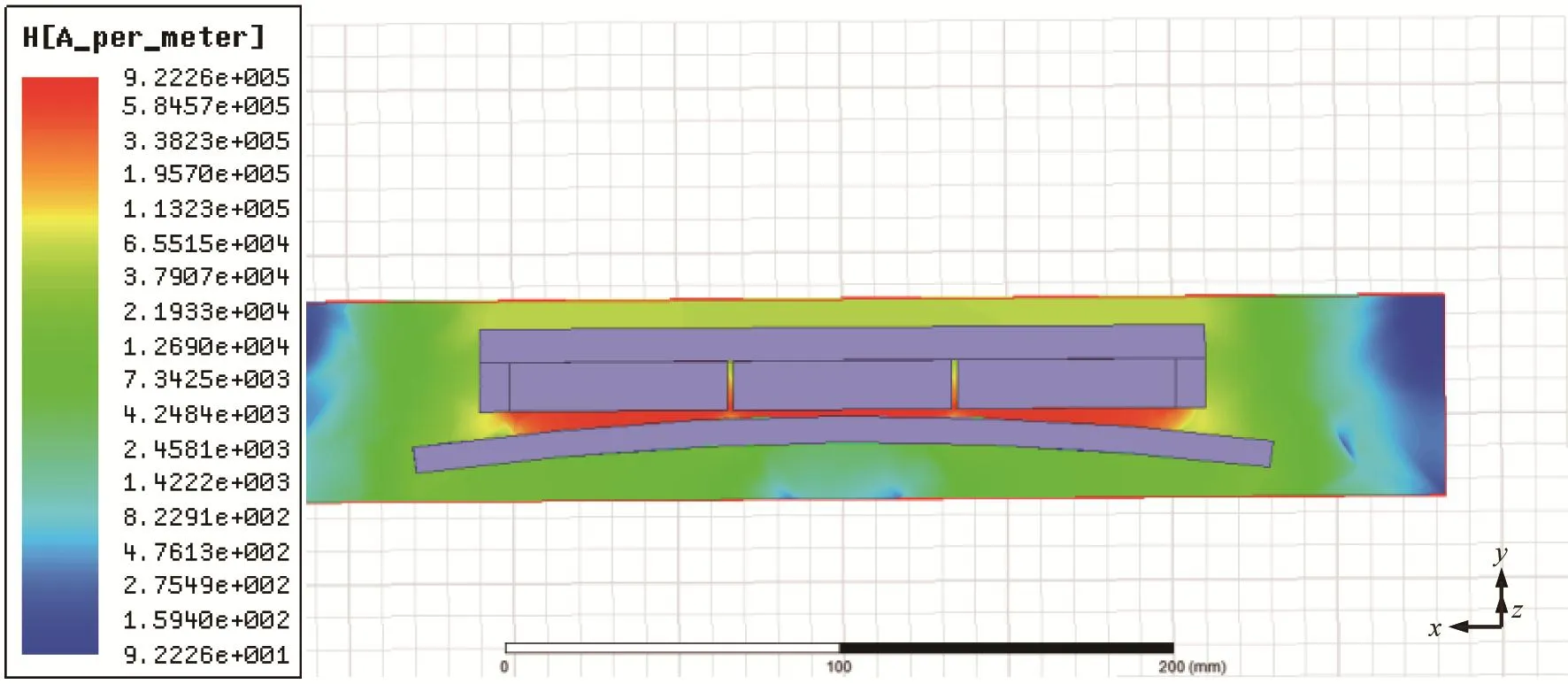
圖16 永磁吸附裝置的磁場強度分布云圖(R=10 m)Fig.16 Cloud map of magnetic field strength distribution of permanent magnet adsorption device(R=10 m)
4 實驗驗證
為了驗證上述優化結果的準確性,本文制作了如圖17所示的簡易永磁吸附裝置,通過實驗對優化結果進行驗證。為了便于測試,鋼制壁面采用無曲率鋼板,永磁吸附裝置的主要結構參數均采用實際加工尺寸,即:永磁吸附單元上方擾磁材料的截面長度L=110 mm,外側擾磁材料的截面寬度δ=9 mm,永磁吸附單元長度D=29 mm,永磁吸附單元寬度W=64 mm,永磁吸附單元高度A=12 mm,相鄰永磁吸附單元間隙寬度C=2 mm,擾磁材料厚度K=12 mm。

圖17 簡易永磁吸附裝置實物Fig.17 Simple permanent magnet adsorption device
由于永磁吸附裝置加工周期長,若做多組實驗的話,則須加工多個永磁吸附裝置;此外由于裝置的磁吸附力較大,實驗的危險性較大,出于安全考慮,只對其中一組變量進行實驗驗證。在永磁吸附裝置整體尺寸不變的情況下,以工作間隙X為單一變量,通過實驗得到其磁吸附力隨X(1~10 mm)的變化情況,并與仿真結果進行比較,如圖18所示。從圖18中可以看出,優化后永磁吸附裝置的磁吸附力的實測值比仿真值平均約高16.45%,但實測值與仿真值存在一定誤差,這主要是因為:1)鋼板表面存在一些凹凸不平的弧坑、焊點,同時因長期遭受風雨而腐蝕,其表面較為粗糙;2)受實驗條件的影響,實驗用永磁吸附裝置與鋼板之間夾有一定厚度的薄板(2~10 mm不等),薄板與空氣的導磁率存在一定的偏差;3)所制作的永磁吸附裝置的實際尺寸與理論尺寸存在一定偏差;4)實驗采用法蘭盤逐個加載,加載時存在一定誤差,同時承載籠在加載時也存在一定程度的震蕩。

圖18 永磁吸附裝置磁吸附力實驗結果與仿真結果對比Fig.18 Comparison of experimental results and simulated results of magnetic adsorption force of permanent magnet adsorption device
5 結 論
采用非接觸式永磁吸附的爬壁機器人具有較好的立面越障功能,為了確保其運動的可靠性,本文針對輪腿式爬壁機器人永磁吸附裝置進行了設計與優化。基于控制變量法和有限元仿真對永磁吸附裝置進行參數化分析,確定在鋼制壁面半徑為5~7 m時,相鄰永磁吸附單元間隙及永磁吸附單元數量對磁吸附力的影響較大,當相鄰永磁吸附單元間隙為2~4 mm及永磁吸附單元數量為3~5個時,磁吸附力的利用率較高。最后,通過制作優化后的簡易永磁吸附裝置,利用實驗得到了其磁吸附力隨工作間隙的變化曲線,實際測得的磁吸附力雖比仿真值大,但誤差較小,這在一定程度上驗證了結構參數優化仿真結果的準確性。通過對永磁吸附裝置的有限元分析與實驗驗證結果可知,優化后永磁吸附裝置產生的磁吸附力的實測值比仿真值平均約高16.45%,其能有效保證輪腿式爬壁機器人在立面上穩定運動。所設計的永磁吸附單裝置及其結構優化結果可為采用永磁吸附的爬壁機器人的設計提供理論支撐,從而獲得可靠的磁吸附方案。