光伏發電系統故障檢測與定位方法
2022-03-10 13:00:16馬進,王闖
內蒙古科技與經濟 2022年1期
馬 進,王 闖
(中廣核新能源遼寧分公司,遼寧 沈陽 110000)
光伏發電在全球范圍內正在大幅增長,原因是具有足夠的支持技術,并能帶來良好的經濟和環境效益,光伏發電目前是最有希望的可持續能源。隨著能源需求的增長,光伏發電裝置越來越受到重視,大規模光伏發電系統由大量的太陽能組件相互連接。一個組件的故障最終會影響整個系統的性能。大型光伏電站需要采取主動監測的方式來檢測早期故障,以便在重大破壞發生之前進行適當的補救。
目前大型光伏電站中,監測系統大多內置逆變器,以防止電網側出現異常,并監測光伏系統運行狀態。但是,很難檢測到組串級中的故障。在大多數情況下,逆變器級的過電流保護裝置無法檢測到直流側的故障,由于過電流裝置所檢測到的電流數值較低。即使在逆變器級檢測到故障,也很難在光伏系統中確定故障位置。通常線路故障是由陣列中兩點之間的意外短路造成的,主要是由于進水、動物咀嚼、機械損壞或直流接線盒腐蝕等原因。存在于單個組串或兩個組串之間的故障,即線路故障,線路故障可分為串內或串間故障。筆者主要研究串內線路故障,串內線路故障如果長時間不被發現,這些故障會擴大并損壞光伏系統組件。因此,通過監控光伏系統的故障,提供早期故障預警對維持正常運行至關重要,有利于提高光伏發電系統的發電量。光伏監測級別包括逆變器級、陣列級和組串級別。組串級監測每個組串的實時工作狀態。在組串中的發電量減少時可能是診斷為故障,但這需要很長的停機處理時間,可能會阻礙故障檢測響應的及時性和有效性。快速故障檢測方法是監測瞬時組串電流。特殊氣象條件下的瞬時光伏串電流監測信息,很難確定組串是否正常工作。因此,有必要比較每個組串,找出哪一個組串出現異常。測量異常值的偏差可用于識別故障組串。
現階段組串故障診斷測方法主要有兩種:一種是基于過程歷史數據的方法;另一種是基于模型的方法。這個基于過程歷史數據的方法使用的經驗模型來自對可用數據的分析,這些數據依賴于計算和機器人工神經網絡(ANN)、貝葉斯等學習方法神經網絡與模糊邏輯。但是,基于過程歷史方法需要相關數據集的可用性支持,用于監控光伏系統。另一方面,基于模型的方法比較測量值和信號分析計算后輸出警報信息。目前有幾種基于模型的故障診斷方法應用于光伏系統中的檢測。統計信號處理方法主要基于波形信號;例如,時域反射計,擴頻TDR和接地電容測量,用于檢測和定位有故障的光伏組件。基于I-V特性的檢測比較了實際與預期陣列I-V特性的電參數,利用參考和陣列的差異進行功耗分析識別故障模塊和組串。這些方法都無法識別故障的類型和位置。在故障診斷中采用模塊級監測,在每個光伏組件上安裝無線自供電的傳感器,并比較測量值和估計值基于MPPT算法的最大串功率。基于模塊的多用途傳感器配備電壓、電流、輻照度、溫度和連續監測,用于通過分析其估計值來檢測光伏陣列中的故障以及實際效率。盡管通過比較估計參數和測量參數檢測故障可能是有效的,這些故障檢測方法可能會受到各種限制,如無法及時發現和定位故障,缺乏自動化的故障診斷方法,需要大量傳感器,因此成本高昂。所以,計劃引入一種采用兩段式故障檢測的優化電壓傳感器,此算法仍然需要在光伏電池串,但在大規模陣列中很難應用。許多大型光伏系統通常將串電纜組合在一起,并通過背面的電纜穿過模塊安裝電纜管道,這樣容易發生線路故障,如圖1所示。此外,光伏系統缺乏保護可能會導致火災發生,如圖2所示。

圖1 光伏組件后面的布線場景顯示了捆綁在一起的一組電纜

圖2 由于故障導致的直流接線盒故障
筆者提出了一種對組內線路故障的自動檢測與定位系統的方法。故障檢測的基礎是產生故障指示信號,稱為“殘差”,通過組串電流測量值計算。該方法通過建立一個分析模型來預測線路故障發生的精確位置,該模型以故障電流水平、輻照度和光伏組件參數之間的函數關系為基礎,將故障位置建模。文中還對所提出的方法進行了擴展,使之適用于任意串數和任意組串的陣列,詳細的演示如何使用相同的故障位置預測模型來預測任意大小陣列的故障位置。特別是,建立了某一光伏陣列拓撲結構的故障定位預測模型,筆者提出了基于陣列尺寸的直接比例乘法器,允許對任意陣列尺寸使用相同的故障定位預測模型的方法。
1 光伏系統說明
1.1 典型光伏系統配置
典型的光伏系統包括光伏陣列、匯流箱、逆變器和其他系統組成,如圖3所示。陣列由串聯和并聯的光伏組件組成,以獲得所需的電壓、電流和功率。在小型光伏系統中,組串通常直接連接到逆變器。相反,在大型光伏系統中,串接器通過匯流箱與逆變器相連。圖3所示的光伏陣列示意圖包括并聯的N串,每個串包括串聯的m個組件。每個組串產生的電壓是m×V,其中V是每個組件上的電壓,在陣列上產生的電流是n×I,其中I是通過每個組串的電流。由于陣列的結構,組串中的每個組件流過相同的電流,并且陣列中的每個組串有相同的電壓。對于給定的陣列,總輸出功率(Pout)可以計算為(m×V)×(n×I)。本文假設存在組串級電流監測。組串電流測量值表示為Li,i∈[1,n),其中下標“i”表示第i串測量值。這個陣列電流和電壓分別表示為Iα和Vα。

圖3 光伏系統的典型配置
1.2 光伏陣列保護要求
圖3中的OCPD和GFPD表示過流保護裝置以及接地故障保護裝置。OCPD已連接為了保護陣列不受過電流故障的影響,GFPD用于防止接地故障。連接這些保護裝置的目的是保護光伏系統中的電纜和電氣設備。特別是大型光伏電站中的OCPD一般都與逆變器或匯流箱相連,數百根串接在一起。有大量組串聯接到一個OCPD,特殊情況下的小故障電流,有一些相對較小的不匹配的組串內線路故障可能仍然未被檢測到。因此,在大型光伏系統中,很難識別和定位線路故障。
光伏系統還包括旁路二極管和阻塞二極管。旁路二極管用于光伏組件保護,防止反向電流從良好組件流向故障光伏組件。阻塞二極管的用途與旁路二極管不同,它是管防止從正常組串到故障組串的反饋電流。然而,旁路二極管和阻塞二極管不能替代故障電流保護。在故障期間,反向電流可能被阻塞二極管完全切斷,這可能導致OCPD失去適當中斷故障的能力。
1.3 光伏陣列中的線路故障
線路故障是任意的,可以發生在任意兩點之間在光伏陣列中。根據單串或多串故障,線路故障分為串內故障(如圖3中的故障F1、F2和F3)或串間故障(如圖3中的故障F4)。與故障串相關的電流和電壓相對于無故障串的偏移量可用于檢測故障發生并確定位置。然而,故障串的電流主要取決于模塊失配(位置失配)的數量、模塊電壓和故障阻抗。根據“位置不匹配”原理,故障位置定義為旁路模塊的數量。例如,圖3中標記的故障F1、F2和F3分別對應于25%、50%和75%的位置不匹配(假設一個字符串中有4個模塊)。
筆者的目的是檢測和定位光伏陣列中的串內線路故障(如F1、F2和F3)。本文不考慮串間故障(F4),但該方法可以擴展到串間故障的檢測。串內線路故障可使串內電流降至不足以使任何保護裝置跳閘的水平。因此,提出的系統方法必須首先檢測出串內線路故障的發生。其次,識別出有故障的組串。最后,在發生故障的組串中找到位置。在這種方法中,所需的信息是串電流(Ii)和太陽輻射(G)。
2 提出的故障檢測和定位
本節總結了建議的故障檢測和定位方法。所提出的總體方法,如圖4所示。
提出的光伏陣列故障診斷策略分兩個階段實現。在第1階段,檢測到故障,然后在第2階段精確定位故障。
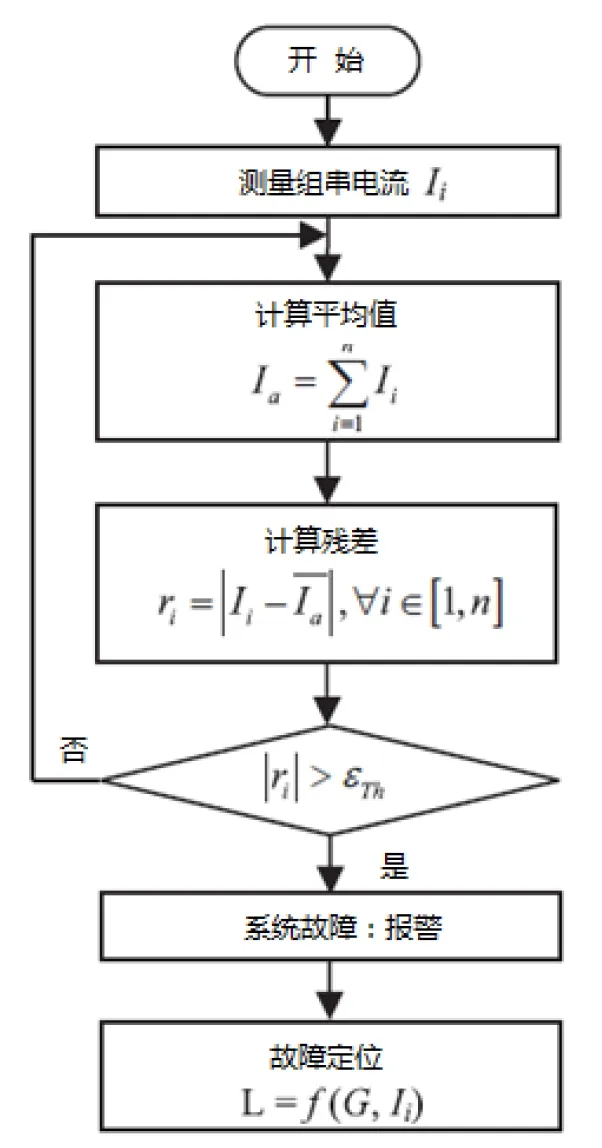
圖4 提出的故障檢測和定位程序流程
2.1 故障檢測
故障檢測的目的是識別光伏陣列運行中的異常。檢測故障發生的方法是生成殘差的故障指示信號。由串電流控制測量預先確定的閾值。為了建立基于殘差的故障檢測方法,我們將第i串的串電流測量值表示為Ii,陣列電流表示為Iα。因此,Iα可以寫成:
(1)
提出的故障檢測程序以下步驟:
步驟1:計算串電流的平均值:
(2)

步驟2:計算每個組串的剩余值
對于每個組串,剩余電流可以計算為:
(3)
步驟3:基于殘差估計的故障檢測
|γi|>εTh→組串中存在ith故障
(4)

εTh=sup‖γi‖2在沒有故障的情況下。
|?i∈[1,n]|
(5)

圖5 基于殘差產生的故障檢測系統概述

圖6 4×4的電流與故障定位特性實例在組串1的不同位置出現錯誤的數組
故障檢測方法的通用框圖如圖5所示。對于每個組串,殘差γi故障信號通過公式(1)-(5)得出。例如,圖6表示4×4陣列在串1的各個模塊位置(Li)、i∈[1,4]處伴隨串內故障的串電流。對于每個故障位置(Li),串1的相應電流幅值(Li)正在變化。故障位置的增加導致(Li)值的減小,從而提高了殘差信號的靈敏度。如圖6所示,僅在串1中可以看到電流大小的變化,而其余串電流保持不變,這表明串內故障僅影響對應串的電流輸出。每個故障位置代表繞過一個光伏組件,導致該組件的電壓損失。由于故障串與其他非故障串并聯,因此串1中模塊的電壓將增加,以保持所有串的電壓相同。還可以觀察到,串1中的電流大小表示負值,這是由于從正常串流向故障串以保持每個字符串的電壓相等的反饋電流造成的。
圖6中顯示了不同故障位置的串1中的大量電流變化,而串2、3、4中的電流仍然不受影響。
2.2 故障定位
如果,γi>εTh,i∈[1,n]那么我們的下一個目標是估計第i個組串中故障發生的可能位置。預計故障位置、輻照度、串中模塊數量、陣列中串的數量和溫度共同控制通過故障串的故障電流(Li)水平。因此,可以肯定地說,用于估計組串內故障位置的表達式可以用以下函數形式表示:
(6)

(7)
我們的目標是得到一個回歸函數f(G,Ii),這樣一旦發生故障,就可以估計出串內故障的精確位置。對于函數f(G,Ii)的推導,G的范圍取400W/m2到1 000W/m2。為了得到等式(7)的回歸函數,通過使用在MATLAB中開發的仿真模型進行的一系列仿真,獲得了Li-G-Ii之間的三維數據集。在MATLAB中實現了4×4、6×3、15×4等多種陣列結構。圖7示出了為15×4配置獲得的數據集。通過對各種故障位置(介于1和15之間)和太陽輻照度(介于400W/m2和1 000W/m2之間,以100W/m2為步幅)組合以及相應的串(故障)電流水平進行模擬掃描,獲得數據集。
為了根據式(7)獲得(Li),使用MATLAB的多項式曲面擬合函數將數據集擬合到回歸模型中,以獲得以下形式的回歸表達式:
(8)
使用模擬生成的數據集,我們估計參數(C1到C9)的值。選擇3次擬合來估計多項式的系數,該多項式在最小二乘意義上擬合一組數據。對于與圖7對應的15×4陣列配置,發現3次擬合是最合適的。

圖7 顯示串電流與故障位置和15×4陣列的輻照度水平
3 結論
光伏系統故障檢測與定位算法是基于殘差生成和回歸系數提取的。結果成功地證明了所提出的成功檢測和定位串內線路故障的方法,也適用于在大型太陽能發電場中。這個方法使用殘差的異常值檢測門檻。閾值邊界之外的任何異常值都表示一個故障。一旦檢測到故障,故障定位算法就可以預估出組串中的故障位置。故障定位算法使用僅需要輻照度的基于回歸的表達式弦電流的大小。理論模擬對研究進行了驗證,證明了本方法的可行性。此外,故障定位方法已對任何大小的數組進行了泛化和驗證。通過分析發現,組串級監控可以顯著提高光伏電站直流側的發現故障的能力。現有的保護裝置主要是為了保護逆變器和直流側火災用,補充現有保護設備光伏故障的檢測和定位,最終有利于光伏組件的壽命。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
汽車維修與保養(2015年6期)2015-04-17 03:31:50
