主成分分析法在UUV集群反水雷搜索中的應用
2022-03-11 03:33:36田云飛程建波
數字海洋與水下攻防 2022年1期
關鍵詞:方法
高 杰,田云飛,許 瑩,初 磊,程建波
(1. 北部戰區保障部直屬保障隊,山東 青島 266000;2. 海軍潛艇學院,山東 青島 266099;3. 中國人民解放軍92730部隊,海南 三亞 572016)
0 引言
水雷武器以隱蔽性好、打擊突然、易布難除、效費比高、能完成戰略任務等獨特優點,為歷代海戰兵家情有獨鐘。在與水雷的對抗中,反水雷作戰處于一種不對稱的被動地位,始終是一項充滿不確定和危險的使命任務,西方各國海軍一直在不遺余力地發展反水雷裝備,試圖打破這種不對稱性。作為無人作戰體系發展的重要組成部分,無人操縱的反水雷裝備是提高反水雷作戰安全性的有效途徑之一[1-2]。
美軍自20世紀90年代開始對水下無人航行器從事水下戰內容進行規劃,多次修訂并頒布了《海軍水下無人航行器主體計劃》,計劃中明確將反水雷作戰列為 UUV的主要使命任務之一。美軍認為,UUV集群反水雷作戰是目前UUV集群作戰研究的熱點問題[3]。由 2個或 2個以上擔負反水雷職能的UUV,在任務區域內按計劃方案獨自或協同執行對水雷目標的探測、分類、識別和清除等反水雷作戰任務的活動,統稱為UUV集群反水雷作戰[4]。通過對UUV集群反水雷各種典型搜索方法進行比較,從中選擇一種最優搜索方式,是本文要解決的問題。
1 背景分析
反水雷UUV可以分為ROV(水下遙控航行器)和AUV(自主式水下航行器)2大類。其中,ROV由人工通過光纜對航行器進行操控,多用于水下滅雷。而AUV具有自主智能特征,可以獨立完成相應任務。由于AUV個體之間通信和充分的戰術協同成為可能,解決了多個UUV水下繞障機動、編隊編組、離線偵察、協同作戰等一系列問題,因此,AUV是集群反水雷作戰的主要類型。
UUV集群根據編群實施反水雷作戰任務的UUV結構和功能,可以劃分為同構群和異構群 2種。單純的同構、異構均有各自優缺點,為提高UUV集群的可靠性和最大程度地發揮 UUV集群的整體效能,依據作戰需求和裝備特性,我們這里主要研究同構、異構合理配置的UUV集群。
單個UUV搜索模式是集群搜索模式研究的基礎。目前,研究較多的搜索模式有隨機搜索、梯形搜索、Z形搜索、環形搜索等[5]。多個 UUV可以按照既定方案,以個體的形式在水下任務區的劃分單元內獨立進行反水雷任務,也可以多個協同的方式組成合理的水下UUV編隊進行任務區作業。一般典型搜索模式有Z形搜索、Z形交叉搜索、梯形搜索、正交梯形搜索等。具體如圖1-4所示。
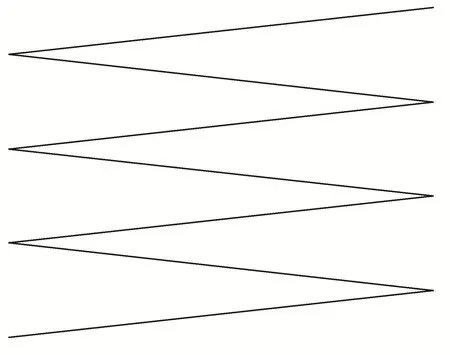
圖1 Z形搜索Fig. 1 Z-shape search
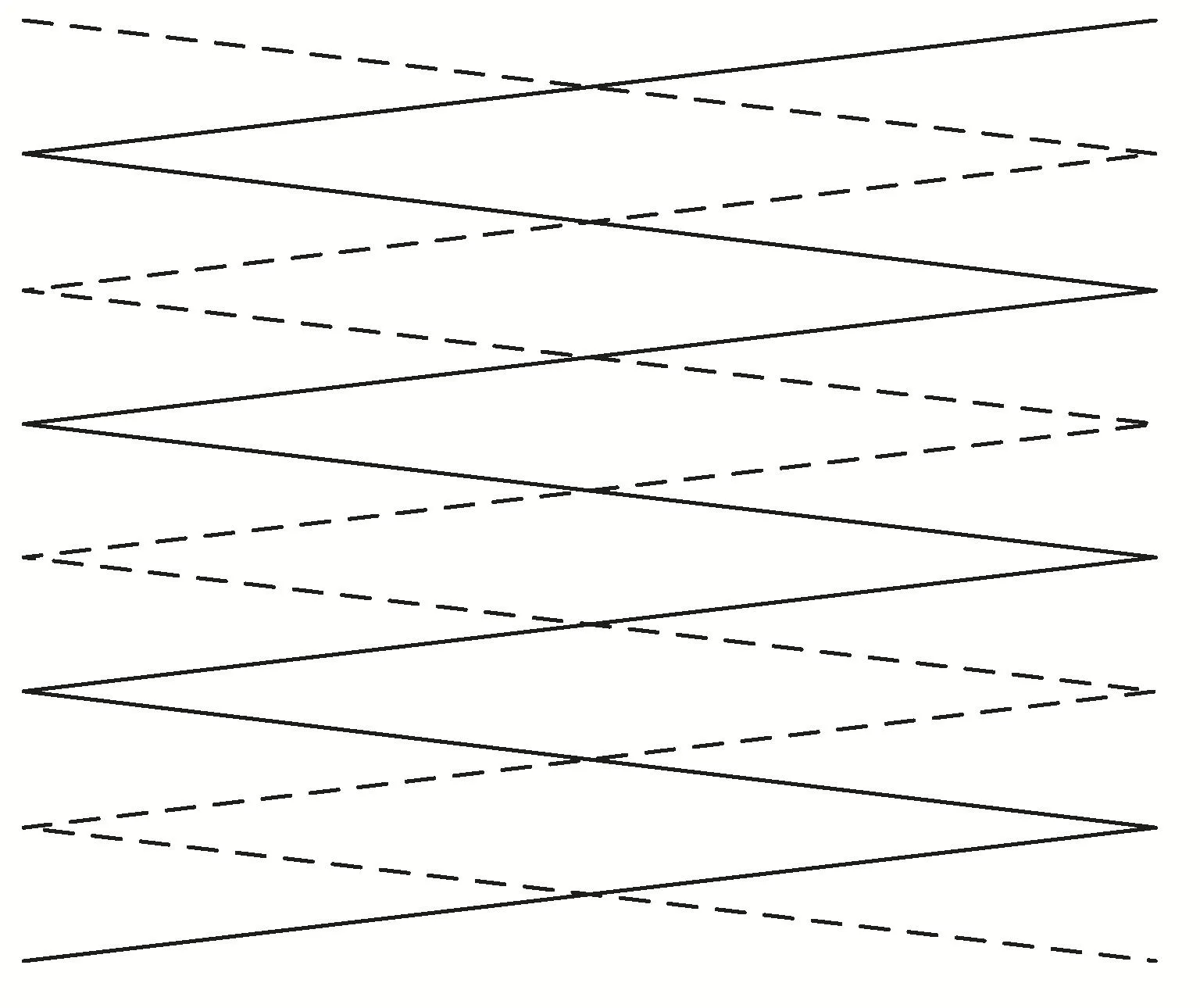
圖2 Z形交叉搜索Fig. 2 Z-shape cross-search
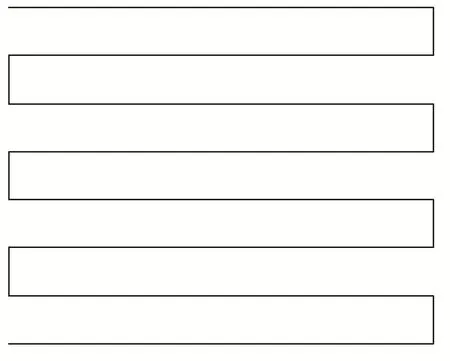
圖3 梯形搜索Fig. 3 Trapezoid search
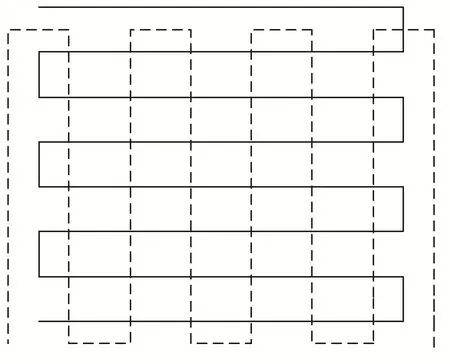
圖4 正交梯形搜索Fig. 4 Orthogonal trapezoid search
2 評價指標體系的建立
對于這個多指標問題,常用的評價方法[6]有層次分析法、模糊綜合評判法和多屬性決策分析法,但這3種方法都有一個較大的弊端,就是用人為因素確定指標的權重,不僅要耗費人力、物力,而且存在較大的人為誤差。主成分分析法[7]是一種不依賴人為因素的評價方法,它是利用降維的思想,在損失很少信息的前提下把多個指標轉化為少數幾個綜合指標的多元統計方法。所以通過主成分分析這些指標,能較好地選擇最優搜索方式。
在UUV集群反水雷搜索方法的優選問題中,各種搜索方法在不同情況下的搜索發現概率是最為關鍵的問題。除此之外,還要考慮其它一些相關的、影響搜索效能發揮的制約性因素。如果不考慮海區環境,一般可以從發現概率、搜索時間、UUV數量、集群方式和實施難易程度5個方面對各種搜索方法進行比較,從中選擇一種最優搜索方式。
2.1 發現概率
在UUV集群反水雷搜索方法的選優問題中,發現概率是選擇搜索方式時最關心的指標,滿意的搜索方式必須有較高的發現概率。UUV在水下搜索目標的過程中,其探測概率受到諸多因素的影響,其中最主要的不確定因素就是聲吶的實時探測距離和水雷目標的姿態角[8]。在選擇最優搜索方式時,以模擬的發現概率來代替實際的發現概率,其準確性取決于搜索過程的模擬真實度。
2.2 搜索時間
各種搜索方法需要的搜索時間是不一樣的,對不同類型的UUV來說,其聲吶一次搜索時間的長短也不同。另外,由于UUV續航時間和航程是有限的,因此,即使可用來搜索水雷的時間很充裕,UUV也不能長時間地進行搜索。
2.3 UUV數量
搜索方法不同,需要投入搜索的UUV數量也不一樣。由于我們可利用的UUV數量是十分有限的,同時它們可能還要擔負其它作戰任務,因此在滿足一定搜索概率的同時,投入的搜索兵力越少越好。
2.4 集群方式
通常情況下,UUV集群可以按照既定方案,以個體的形式在水下任務區的劃分單元內獨立進行反水雷任務,也可以多個協同的方式組成合理的水下UUV編隊進行任務區作業。作業方式可以由指揮員從作戰效能的角度出發,根據戰場環境條件、裝備性能等因素來決定。
2.5 實施難易程度
對UUV集群來說,搜索方法不同,其實施難易程度是明顯不同的。因此在有一定發現概率的前提下,我們應當盡量選擇那些操作簡單、實施方便的搜索方法。
評價指標體系結構見圖5。

圖5 評價指標體系Fig. 5 Evaluation index system
3 主成分分析法
主成分分析法是多元統計分析中一種常用的方法。通常把轉化生成的綜合指標稱為主成分,其中每個主成分都是原始變量的線性組合,且各個主成分之間互不相關,這就使得主成分比原始變量具有某些更優越的性能。其基本思想是通過降維,把眾多指標(m個相關變量)通過線性變換濃縮轉化為維數較低的p個互不相關的指標變量,亦即主成分變量,同時要求主成分變量所包含的指標信息量占原始指標信息量的85%以上(即主成分的累計貢獻率達到85%以上)。具體步驟如下。
假設有n個樣品,m個變量(指標),構成矩陣:
步驟1:為了消除各指標間的不可公度性影響,將原始決策矩陣的樣本值xij標準化為

式中:

由此可得到主成分分析和理想點基礎上的各方案總體優化決策排序向量,決策者可據此結果進行決策。
4 算例
以MATLAB為仿真平臺,從發現概率、搜索時間、UUV數量、集群方式以及實施難易程度這5個指標分別對UUV集群反水雷搜索常采用的Z形搜索、Z形交叉搜索、梯形搜索和正交梯形搜索4種搜索方法進行比較。根據計算機模擬所得的結果見表1。
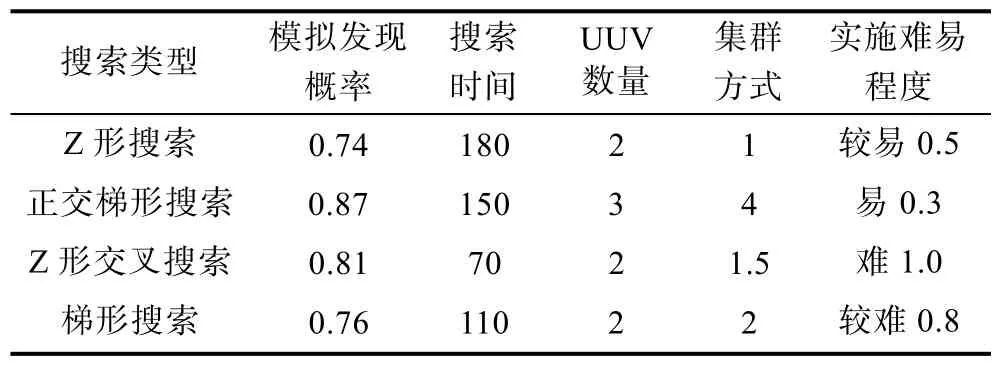
表1 計算機模擬結果Table 1 Computer simulation results
表1的數據僅憑經驗難以做出最優的決策。下面就以主成分分析法來進行決策評估。
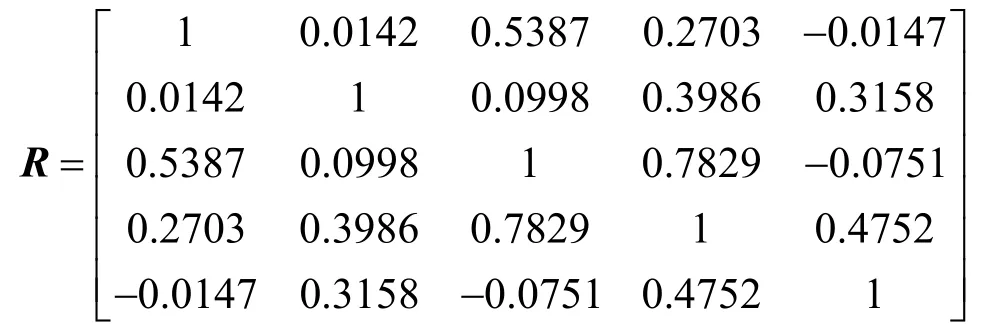
由表1中的指標數值,可以確定不同的搜索方式對指標的樣本屬性值為xij,從而可構造原始樣本決策矩陣,標準化樣本決策矩陣,樣本的指標相關矩陣如下,并可計算R的特征值和貢獻率(見表2)。
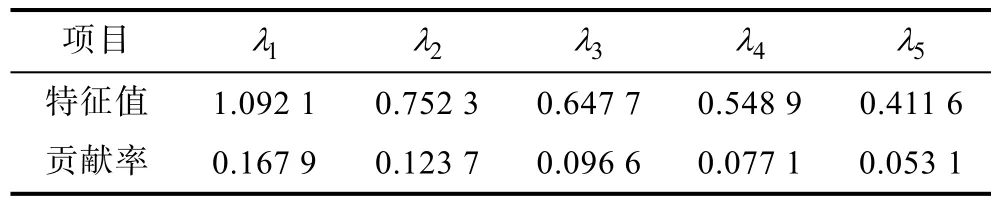
表2 特征值和貢獻率Table 2 Eigen value and contribution rate
可見:

取前4個主成分即可達到決策分析的要求。根據主成分分析法的計算結果,在典型作戰剖面下,4種搜索方式的優劣排序如表3所示,因此,在這種態勢下,指揮員可以選擇正交梯形搜索方式。這里要注意,采用正交梯形搜索方法,隨著搜索時間的不斷增加,發現概論不斷增大,但一定時間后,隨著搜索區域的不斷增加,發現概率不斷減小,對目標搜索效率也在降低[9-10]。
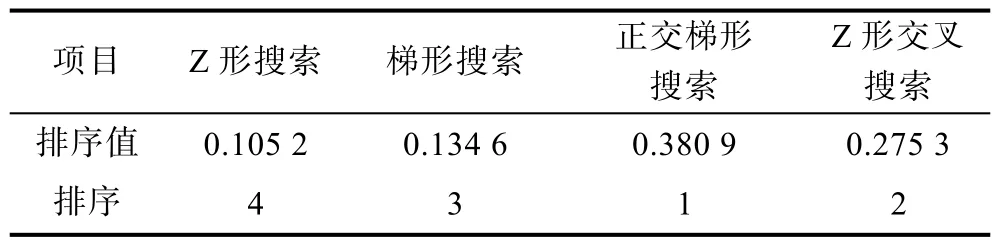
表3 綜合評價排序表Table 3 Sorted table of comprehensive evaluation
5 結束語
相對于模糊綜合評判法、層次分析法和多屬性決策法等方法來說,把主成分分析法應用于 UUV集群反水雷搜索方法優選研究,以各樣品的指標數據為依據進行分析,完全排除了人為因素,評價的結果是各樣品綜合信息的反映。因此,本文的方法具有更加客觀、科學、嚴密的特點,并且簡便易行。需要說明的是,在實際UUV集群反水雷作戰中,還必須結合所擔負的作戰任務、具體的作戰環境和擁有的資源進行全面、充分的考慮,做出符合當時具體態勢的決策結果。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
