Shipma 軟件在港口工程設計中的應用
2022-03-13 08:22:14印宇軒龍俞辰陳良志
港工技術 2022年1期
印宇軒,龍俞辰,覃 杰,陳良志
(中交第四航務工程勘察設計院有限公司,廣東廣州 510230)
1 軟件介紹
Shipma 軟件是由荷蘭MARIN 航海中心和三角洲公司(Deltares)聯合開發的一款快速仿真(Fast-time)操船模擬程序,可快速模擬船舶在港口以及航道(包括內河航道)中的操縱行為。有別于常見的實時仿真(Real-time)系統,Fast-time 系統具備以下優勢:
1)建模速度快,運行時間短;
2)配置要求低,試驗成本小。
3)操作簡單,容易上手
因此,該系統特別適用于工程項目前期概念方案和投標階段的方案比選,以及工程項目可行性研究和初設階段的方案論證。根據PIANC[1]中規定,采用理論計算方法[2-3]得到的航道寬度、深度等計算結果,還需要得到操船試驗論證,該試驗論證需涵蓋船舶外形、船首和船尾推進器、拖船、基礎設施情況、環境條件[4-5]等相關因素,試驗模擬所得結果可以作為設計優化依據和限制作業條件被相關人員和單位所采納。特別的,在施工圖階段,應該采用Real-time 系統對前期Fast-time 軟件模擬所得結果做最后論證。Shipma 作為一款Fast-time 仿真軟件,其在國外設計單位以及科研單位,尤其是歐洲地區具有較為廣泛的應用基礎,其模型試驗運行流程如下圖所示:
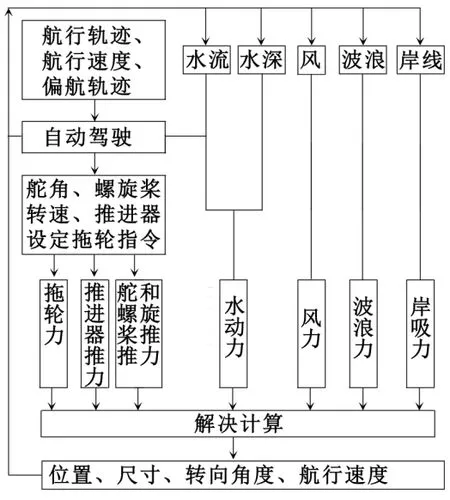
圖1 Shipma 模型流程圖
2 工程概況
某港口工程擴建項目位于突尼斯東部哈馬馬特灣內,項目內容包括新建長2 000 m 集裝箱碼頭,兩條防波堤以及港池和航道疏浚。項目平面方案如下圖所示,該方案航道長1.85 km,寬350 m,疏浚水深-18.5 m。港池寬550 m,回旋圓直徑900 m,疏浚水深均為-17.5 m。南北兩條防波堤分別長800 m 和1 600 m,為拋石斜坡堤結構,堤頭水深約-10 m。本項目為前期項目,在設計中經理論計算得出各平面尺度,最終通過Shipma 軟件進行模型試驗,對平面方案進行論證。
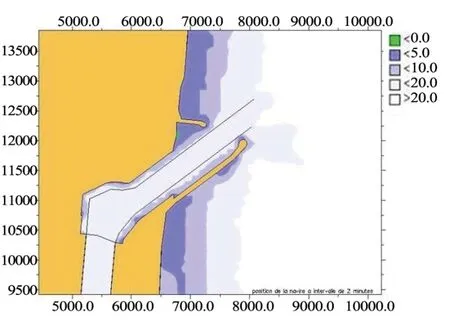
圖2 平面布置圖
3 軟件模擬
3.1 設計船型
本項目所用船舶數學模型采用Shipma 操縱手冊[6]中推薦的Abkowitz 水動力模型,考慮風、浪、流以及水深和船舶吃水等影響。設計船型參數如表1 所示。
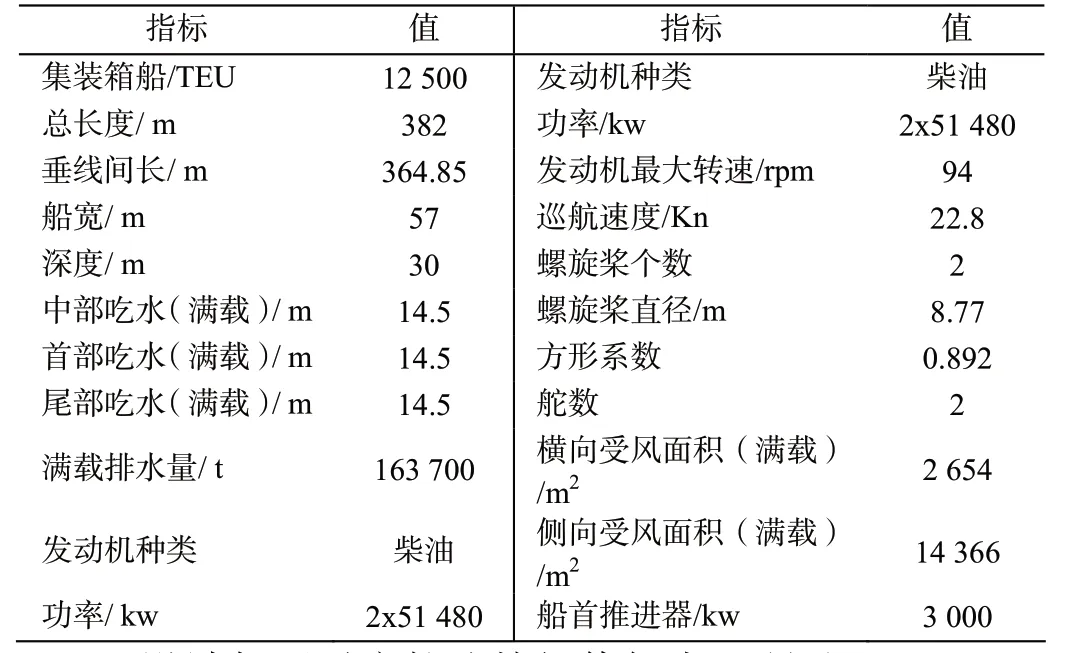
表1 設計船型輸入條件
設計船型對應航速特征值如表2 所示:
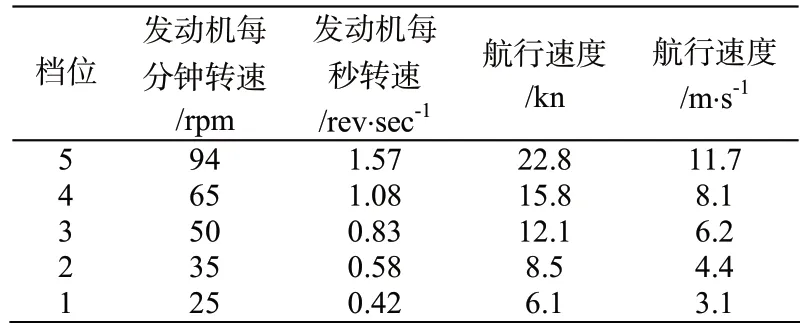
表2 設計船型航速特征值
該船型最大舵角為35°,同時為了保證船舶航行安全,舵的操作需控制在最大值的70 %以內。
3.2 拖輪
本項目采用2 艘65 t 的ASD(Azimuth stern Driven)型拖輪配合船舶進港和離港作業,具體拖輪參數如表3 所示:在Shipma 中,拖輪對設計船型施加的作用主要通過力矩的形式添加到模型中,該力矩大小和拖輪類型,航行速度以及船身系船柱(受力點)位置有關。此外,拖輪的最大功率被限定為額定功率的70 %,以保證操作安全,1.5 m 波高則被認為是拖輪作業的極限波高。對于設計船舶來說,可捕獲拖繩和獲得拖輪幫助的最大速度為6 節,相應的操作時間通常假定為10-15 分鐘。
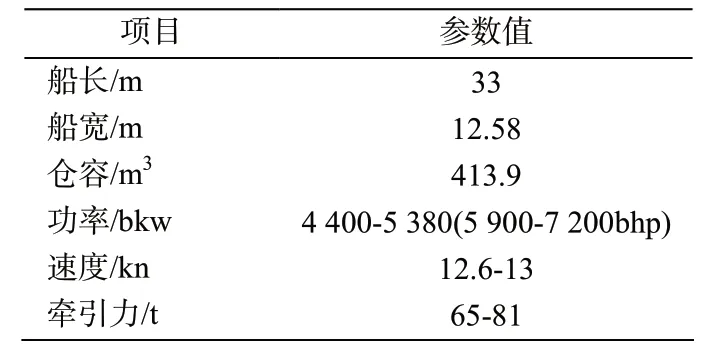
表3 拖輪參數
3.3 環境條件
環境條件中對船舶運動影響最大的因素是風、浪和潮流,它們直接影響船舶通行和碼頭可作業率[7]判定的準確性,因此相關數據輸入的準確性要求也是最高的,所以在進行模擬前,應具備至少一年項目所在地的實測氣象、水文和氣候資料。
1)風
本項目主風向為ESE 向,風速14.1 m/s,風力作用對整個區域的作用視作均布荷載,忽略地形地勢等對風力的影響。
2)浪
本項目主浪向同風向一致,也為ESE 向,波高2.7 m,周期7 s。
3)潮流
該項目防波堤以北區域流速最大值為1 m/s,防波堤以南區域流速最大值為1.5 m/s。風浪流整體情況如圖3 所示:
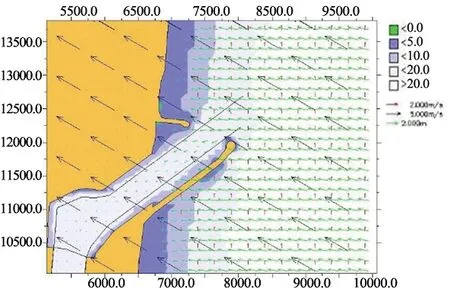
圖3 風、浪、流場示意圖(黑色、紅色、綠色箭頭分別表示風、流、浪)
3.4 操縱定義
操縱定義主要包括航行軌跡定義和自動駕駛程序定義,可以根據實際情況將軌跡定義和自動駕駛程序定義按不同階段劃分。在Shipma 中,船舶由自動駕駛儀操縱,該自動駕駛儀可以在航跡保持和港口操縱模式下操縱,從而可以實現一些典型的港口操縱模擬,如加速、減速、轉彎和掉頭等。本項目船舶進港和出港操縱定義如表4 所示:
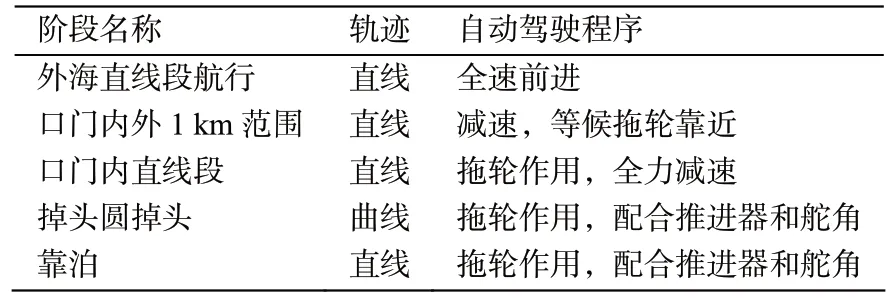
表4 操縱定義表
4 方案論證
4.1 計算結果
對該軟件計算結果分析主要圍繞船舶維持既定航行軌跡行駛的能力,即為了維持軌跡而使用的外部力量,包括船舶自身舵角和螺旋槳轉速,拖輪功率等是否超過額定值。如使用的外部力量未超過各輔助操縱指標額定值,則認為該船舶可以安全的通行,反之,則認為該船舶無法安全通行,需要對平面方案進行優化調整。計算結果輸出主要包括四部分內容;船舶航行軌跡圖、船舶作業曲線、前拖輪作業曲線和后拖輪作業曲線(螺旋槳轉速、船速和舵角隨航行路程變化曲線)。從軌跡圖中可以看到,在進入口門之前,為最大程度抵抗ESE 方向的風和浪,其船頭與航道軸線呈一定角度,在進入口門之后,在拖輪的協助下,船頭逐漸轉向軸線方向,船舶順著航道軸線駛入港池內部,整個過程未發生船舶偏航的情況,船舶作業曲線也同樣反映了這點。船舶航行軌跡如圖4 所示。
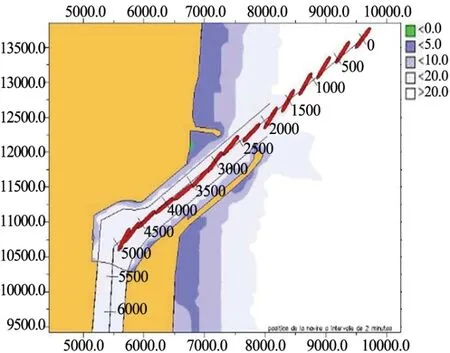
圖4 船舶航行軌跡圖
4.2 結果分析
通過計算得知,本次船舶維持既定航線通行所需外力大小并未超過各輔助操縱指標額定值,且在滿足以下條件時,船舶可以安全的進行靠離泊作業:船舶在進入口門之前,船速需降至6 節,以便拖輪靠船作業,同時舵角轉向10 度以抵抗波浪和潮流的作用。拖輪在船舶完全進入口門后10 分鐘完成靠船作業,開始協助船舶減速和掉頭。在此期間內,船舶需調整推進方向往相反方向完成減速,該調整時間為10 s。船舶進入回旋圓之后,后拖輪開始拖動船舶進行掉頭轉向作業,拖力約540 kN,整個掉頭時間約5 分鐘,在此期間內,船舶航行距離600 m,約2 倍船長,整個作業過程中,拖輪作業功率不超過額定功率70 %,船舶轉向舵角不超過最大轉向舵角35°的70 %。
5 結語
1)Shipma 軟件操作包括設計船型輸入、拖輪參數輸入、風浪流自然條件輸入、地形地質參數輸入、航行軌跡輸入、自動駕駛程序輸入等步驟。輸出成果包括船舶航行軌跡圖、船舶作業曲線圖、前拖輪作業曲線圖和后拖輪作業曲圖,最終通過船舶維持既定航行軌跡行駛的能力來判斷船舶是否可以安全完成進出港作業。
2)Shipma 軟件可以以較低的時間成本、人力成本和經濟成本完成操船試驗,特別適合項目前期概念設計階段、投標階段、工可和初設階段的方案比選和論證。在利用規范進行理論計算得到各平面尺度之后,通過Shipma 軟件進行快速仿真模擬,對各尺度進行論證和優化設計,可以為方案設計可靠性提供更有力的依據。
3)有別于Real-time 仿真系統,Shipma 軟件采用的是Fast-time 仿真系統,該系統不需要船長或引航員實際參與船舶駕駛,僅需軟件操作人員根據實際情況按船舶航行不同階段擇機選擇不同的駕駛程式(操作指令),由電腦程序自行完成船舶駕駛即自動駕駛程序。但在施工圖階段,仍需要通過Real-time 仿真系統進行補充試驗,對平面方案進行最終驗證。
我國目前設計單位較少擁有進行船舶操縱模擬試驗的人員和設備,當在項目設計過程中涉及相關科研試驗時,主要依托各大院校和科研機構完成,而上述單位又主要以Real-time 仿真程序為主,較少配備Fast-time 系統。這就使得一些前期項目、投標類項目在時間和資金本不充裕的情況下,僅能依靠理論計算方法得到計算結果,這在海外工程項目中存在較大的不利影響。一方面,很多海外項目業主在項目前期就要求承包商完成必要的科研論證工作,設計單位僅通過理論計算得到的結果無法得到業主認可,不滿足標書要求。另一方面,理論計算所得結果大多較為保守,這對于競爭激烈的海外現匯投標類項目來說是非常被動的。
綜上所述,本文運用Shipma 軟件,以實際工程項目為例進行操船試驗,模擬船舶進出港全過程,所得結果翔實可靠,可為同類工程設計提供很好的參考價值。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
故事大王(2016年7期)2016-09-22 17:30:08
兒童故事畫報(2013年3期)2013-06-24 05:40:30
小哥白尼·軍事科學畫報(2009年9期)2009-09-14 03:18:56
