三相PWM 整流器滑模控制系統設計
2022-03-15 13:45:20張曉瑩付光杰張曉旭
電子設計工程 2022年5期
關鍵詞:設計
張曉瑩,付光杰,張曉旭
(1.東北石油大學電氣信息工程學院,黑龍江大慶 163000;2.國網黑龍江安達市供電有限公司,黑龍江安達 151400)
整流器是將交流電能變換為直流電能的一種變換裝置,目前,常見的整流電路主要包含不控整流電路、半控整流電路以及全控整流電路3 種。3 種整流電路的主要區別在于所使用的開關型器件不同,不控整流電路采用二極管,半控整流電路采用以晶閘管為代表的半控型器件,全控整流電路采用IGBT、MOS 管等全控性的開關器件[1-2]。對于全控型整流電路而言,與不控整流和半控整流兩種方式相比,其具有容易控制的特點,并且易于實現控制目標。相比較而言,三相PWM 全控型整流器具有比較突出的優勢,其輸出側的諧波電流較小,輸出電壓相對比較穩定,可保證輸入保持在單位功率因數下,同時實現四象限的運行要求,因此三相PWM 整流器被廣泛應用到工業、教育、醫療等諸多領域[3]。但是三相PWM 整流器本身是一個非線性的系統,相對于傳統的PI 控制,其調節能力比較有限,實現比較理想的控制效果具有一定的難度,并且存在諸如動態性能不理想、參數調節復雜等諸多問題[4-5]。而對于滑模控制而言,其主要適用于對非線性控制系統的設計,因其具有動態響應快、抗干擾能力強等特點被廣大學者所關注和研究[4]。滑模控制的本質特性就是在極短時間內快速地對系統的控制狀態進行切換,具有非常強的高頻特性。PWM 整流器通常也工作在高頻工作狀態下,因此,可以將滑模控制與PWM 整流器進行融合,利用滑模算法來實現對PWM 整流器的控制[6]。
對于大部分基于滑模控制的三相PWM 整流器,其通常針對電壓外環進行滑模控制,而電壓內環則采用傳統的PI 控制,并采用SVPWM 實現對PWM 整流器開關管的控制,該設計方法相對復雜,并且對系統的魯棒性以及控制效果均有一定的影響。鑒于此,文中設計了基于滑模控制的電壓外環以及電流內環,實現了控制系統的簡化,并且使系統具有比較理想的動態性能和魯棒性。最后在Matlab/Simulink中搭建了三相PWM 整流器的模型,對所提出的控制滑模控制策略進行了驗證。
1 三相PWM整流器的數學模型
文中主要研究的對象為三相PWM 整流器,其電路拓撲如圖1 所示[8-9],其中,ua、ub、uc分別為三相電網電壓,R、L分別為交流側電感的等效參數,C為直流側的電容,而Z為直流側的負載。
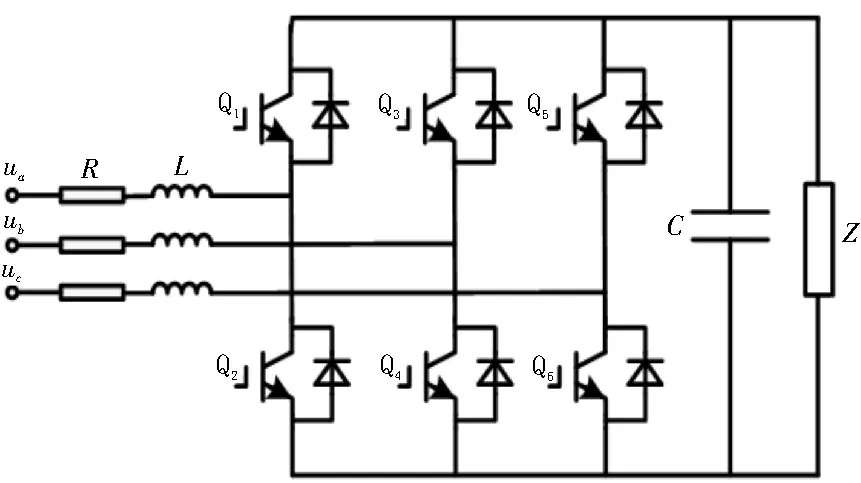
圖1 PWM整流器電路圖
根據電路原理可知,三相PWM 整流器的數學模型可以表示為:
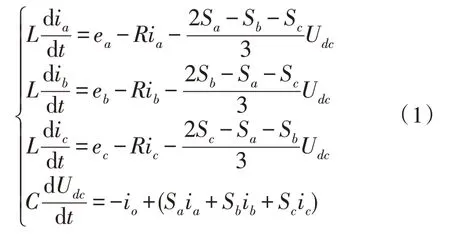
式中,Sa、Sb、Sc分別為三相PWM 整流器中每個橋臂的開關函數,該開關函數中,若S=1,表示相應橋臂的上開關管導通,下開關管截止;反之,若S=0,則表示相應橋臂的上開關管截止,下開管導通[10-13]。io為流過負載的電流,即三相PWM 整流器輸出的電流。在PWM 控制中,為了簡化控制模型,實現類似于直流量的控制方法,通常利用坐標變換理論得到dq軸坐標系下的數學模型,該數學模型可以表示為[14]:
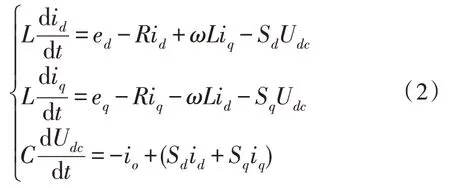
式中,Sd、Sq分別為三相橋臂的開關函數等效在dq坐標系下的開關函數;ed、eq分別為網電壓等效在dq坐標系下的d、q軸分量;id、iq分別為網側電流在dq坐標系下的d、q軸分量;ω為電網電壓的角頻率[15-16]。
對于傳統雙PI 控制器而言,其具有算法簡單、控制形式容易理解的特點,但是,由于三相PWM 整流器非線性的特點[17],傳統的雙PI 控制器存在超調大、暫態性能比較差的特點。鑒于此,文中引入基于滑模控制的思想,由于滑模控制本身為非線性的控制方法,因此,其在暫態控制以及抗干擾等方面具有明顯的優勢。
2 滑模控制器的設計
2.1 電壓外環設計
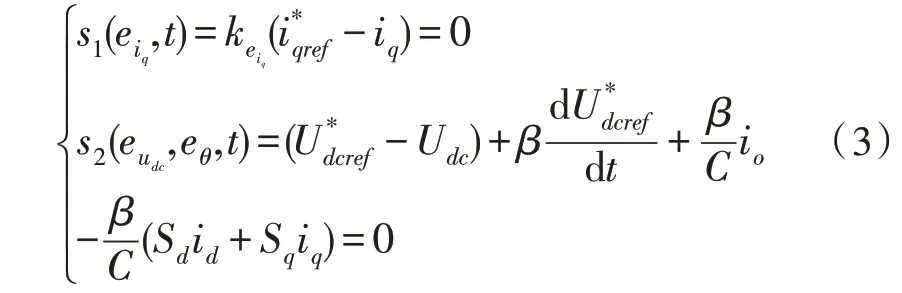
由三相PWM 整流器的數學模型可知,在dq軸的等效模型下,其有兩個自由度,分別為Sd、Sq。Sd可以實現對有輸入側有功功率的控制,從而實現對直流側輸出電壓的控制;Sq主要實現對輸入側無功功率的控制,從而實現對輸入側功率因數的調整。在dq軸模型下,q軸電流表示交流側輸電電流中無功電流的占比,文中需要將輸出側的功率因數調整為1,因此,在對控制系統進行設計時,令iqref=0,即將無功電流控制為零。而對于d軸電流,令其隨著輸出電壓的變化進行實時調節。Sq對電壓外環的滑模面設計為:
而根據坐標系的旋轉關系式有ed=為三相輸電電壓的相電壓有效值,eq=0。則由式(4)可得:
結合式(3)和式(5)可得:
由式(6)可以得到dq軸坐標系下的dq軸指令值分別為:
2.2 電流內環設計
對于電流內環,將其滑模函數定義為:
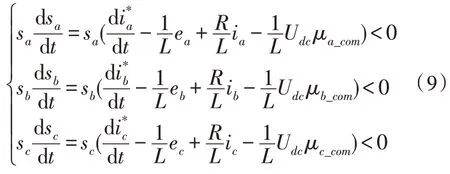
式中,μx_com,x=a,b,c表示對于滑模控制的控制作用,使其運動軌跡在一定的時間內能夠到達滑模面,即保證滑模函數的收斂性。在對滑模電流內環進行設計時,采用滑模變結構的等速趨近方式:

式中,kx為滑模控制器的設計參數,其滿足:

根據式(9)和式(11),在保證滑模控制滿足可達性條件的情況下,每個時刻只有一組開關組合滿足條件。根據該條件,可以對各工況下所對應滑模函數的開關模式進行極性推理,如表1 所示。在系統工作過程中,為了有效降低滑模控制中開關管的開關頻率、降低開關損耗,可以在某一時刻只有一個橋臂的開關管動作[18]。同時,考慮到在趨近律過大時,系統進入到滑模時會引起比較強的抖振現象,因此,可以對趨近律進行分段控制,在系統運動狀態離滑模面較遠時,采用比較大的趨近律,從而縮短趨近時間,加快響應速度;當距離滑模面較近時,采用小的趨近律或采用零趨近律,削弱系統在滑模平面所出現的“抖振”現象,從而提高滑模控制系統的穩定性。
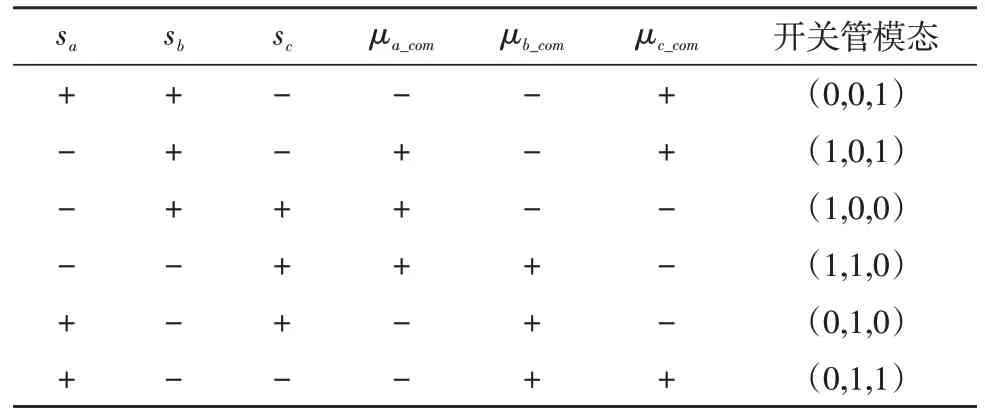
表1 滑模控制規律表
3 仿真電路搭建與分析
為了對所提控制策略的準確性進行驗證,在Matlab/Simulink 下搭建了基于三相PWM 整流器的仿真模型,三相PWM 整流器的電路結構圖如圖2所示。
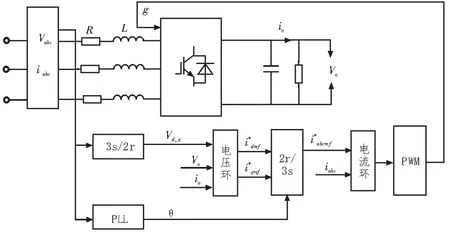
圖2 三相PWM整流器結構圖
在上述的模型中,依然選擇電壓外環加電流內環的控制結構,外環通過式(7)進行計算,得到有功電流的指令值;對于電流內環,d軸電流的指令值根據外環得到。而對于q軸的電流值,由于該設計中要實現功率因數為1 的設計,因此,設定i*qref=0。根據電流的滑模控制算法得到各橋臂的開關函數,之后實現對整流器中開關管的控制。在仿真中,如果要和常規的PI 控制系統作對比,需觀察滑模控制是否具有較好的動態特性和魯棒性。對于仿真系統,其主要的參數如下:
三相輸入線電壓為380 V,直流側輸出電壓為600 V,直流側電容為2 200 uF,交流側輸入電感為10 mH,輸入電阻為0.05 Ω,β=1 100-5。
在仿真中,主要與傳統的雙PI 控制系統作對比,對輸入電流特性、動態特性進行驗證。仿真結果如圖3 所示。
輸入側的電流仿真THD 值如圖3 所示,由仿真結果可知,對于傳統的PI 控制,輸入側電流的THD值為2.71%,而對于雙滑模控制,其THD 值僅為0.19%。由此可知,雙滑模控制可以有效降低輸入側電流的THD 值。
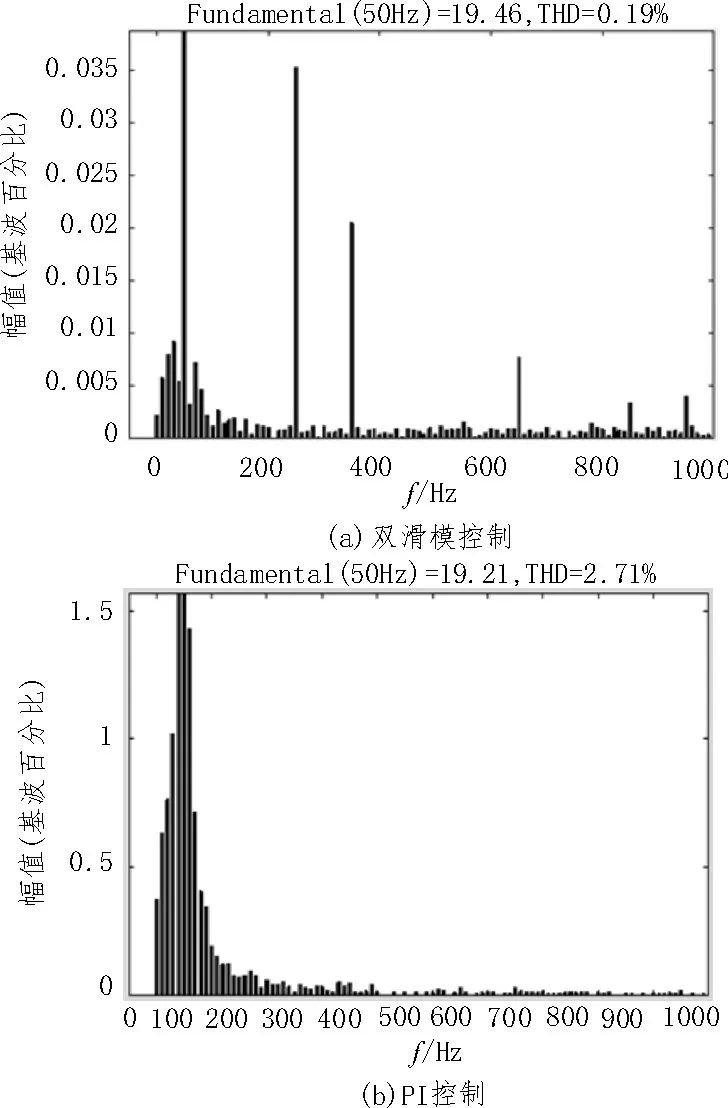
圖3 輸入側電流THD
動態響應的仿真結果如圖4 所示,由圖4 可知,對于雙PI 控制,其從0 增加到600 V 需0.05 s;對于滑模控制,只需要0.02 s 左右,并且滑模控制系統不存在超調現象,動態性能更優。
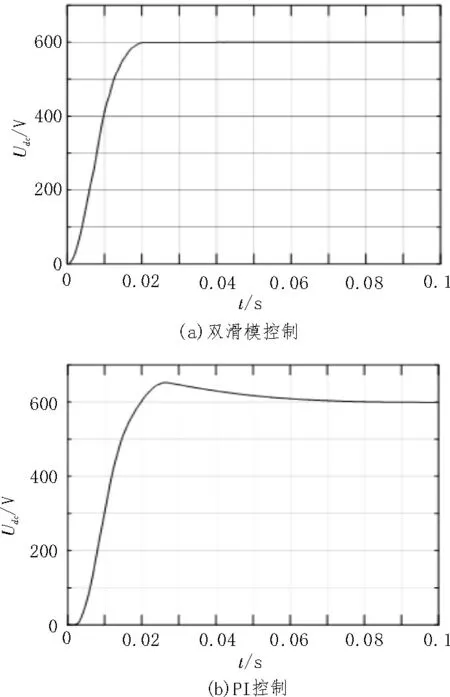
圖4 電壓動態響應波形
圖5 為三相PWM 整流器加載波形圖,在t=0.1 s時刻,在輸出端增加100%的負載,由仿真結果可知,雙滑模控制具有非常好的動態性能,在負載變化的瞬間就完成了電壓的動態過程,而PI 控制的動態過程相對較長。
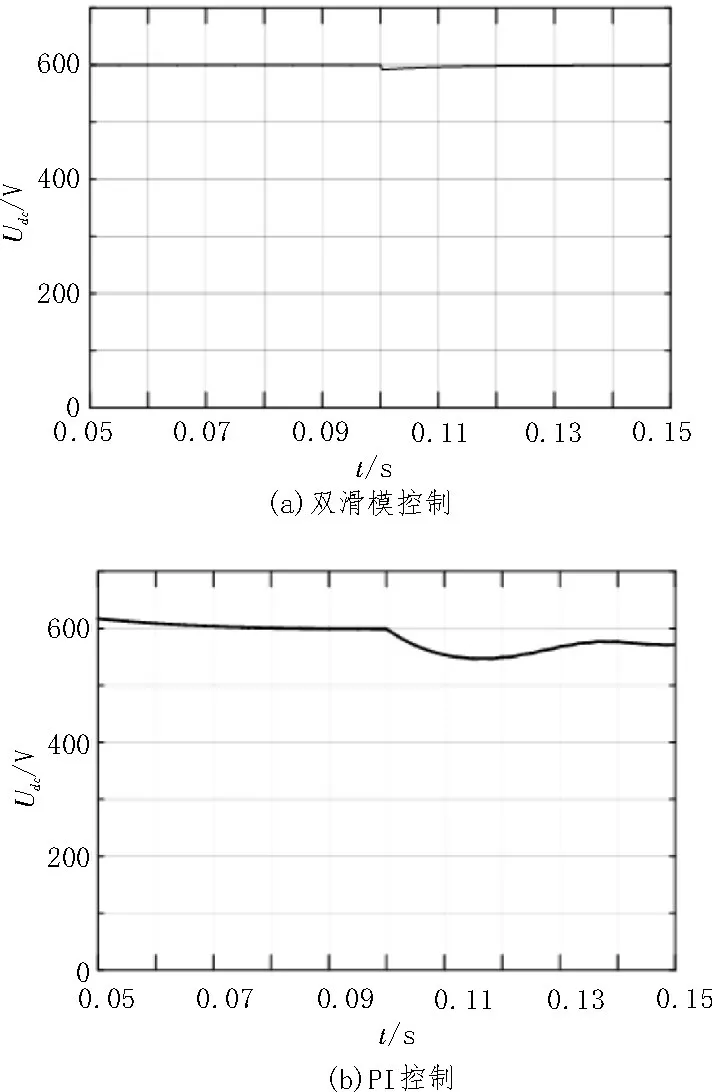
圖5 加載波形圖
圖6 為電壓指令切換的仿真結果,在t=0.1 s 時,直流輸出側的電壓指令值由600 V 變為420 V。由仿真結果可知,雙滑模控制系統在短時間內完成了輸出電壓的切換;而PI 控制在整個仿真過程中都未完成電壓的切換。由此可知,雙滑模控制相對于PI控制而言具有較好的動態響應特性。
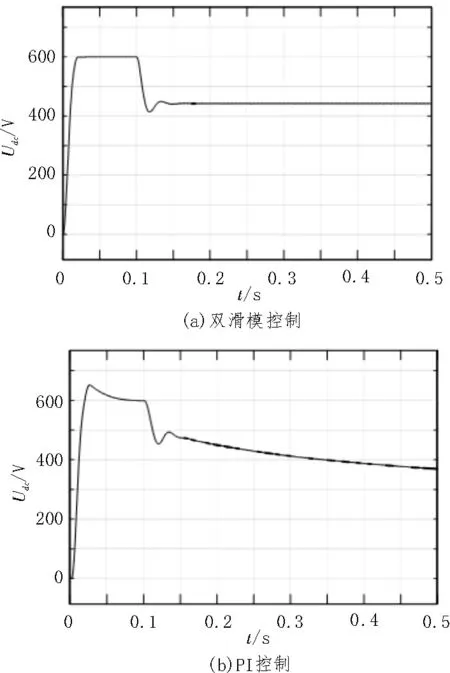
圖6 電壓指令切換仿真結果
通過上述一系列仿真結果的對比可知,對于雙滑模控制系統,其在動態響應上具有非常好的特性,并且可以有效克服傳統PI 控制中的一些問題[19],如超調等。同時,通過該仿真可以說明,所提出的控制策略是有效的,并且具有非常好的動態響應特性和魯棒性。
4 結論
文中圍繞三相PWM 整流器展開,首先對三相PWM 整流器的電路結構進行了闡述,并對其進行了建模。之后,圍繞三相PWM 整流器[20-21],設計了基于滑模控制的雙環路控制系統。最后,在Matlab/Simulink 中搭建了基于雙滑模控制系統的三相PWM整流器的仿真模型,并通過仿真和傳統的基于雙PI控制的三相PWM 整流器系統進行了對比驗證。驗證結果表明,所設計的雙滑模控制系統相較于雙PI控制系統而言,具有很好的動態性能,并且對于負載變化的響應速度非常快,具有非常強的魯棒性。文中方法的提出為三相PWM 整流器的設計提供了一種新的設計思路,具有比較重要的意義。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
