基于帶抑制弧的Petri網表示的嵌入式系統模型的子網化簡
2022-03-18 05:01:18夏傳良
計算機應用與軟件 2022年3期
張 瑋 夏傳良
(山東建筑大學計算機科學與技術學院 山東 濟南 250101)
0 引 言
嵌入式系統在無人機、物聯網和醫療設備等領域都有廣泛應用。對可靠性、正確性和實時性的高要求是嵌入式系統的特征[1-2]。為了保證系統的正確性和有效性,需要在嵌入式系統的設計中采用形式化的建模方法。
目前可用于描述嵌入式系統的模型主要有有限狀態機、數據流圖、Petri網[3]和SysML(Systems Modeling Language)。基于Petri網表示的嵌入式系統PRES+模型是一種用于嵌入式系統建模、驗證和分析的比較有效的方法[4-8]。
為了設計嵌入式系統,Cortés等[4]提出了一種基于PRES+的嵌入式系統的形式化計算模型。Karlsson等[5]提出了一種PRES+與基于組件的系統級設計集成的方法。Xia等[7-8]提出了PRES+模型的細化方法和合成方法。
加入抑制弧可以增強Petri網的建模能力[9-10]。為了提高PRES+的建模和驗證能力,我們在PRES+模型中加入抑制弧,得到基于帶抑制弧的Petri網表示的嵌入式系統(PIRES+)模型。但是,在PIRES+建模和驗證復雜的嵌入式系統過程中存在狀態空間爆炸問題。
為了解決Petri網的狀態空間爆炸問題,國內外學者提出了多種模型轉換方法,其中化簡操作是一種重要的轉換方法。
Boucheneb等[11]提出了一種時間Petri網(TPN)的部分化簡技術。Berthomieu等[12]給出了一種減少庫所和變遷數量的方法。對于PRES+系統,Xia[6]提出了化簡規則,在一定條件下,化簡后得到的PRES+與原模型完全等價。
本文的主要動機是給出PIRES+保性化簡規則,使得化簡前后保持可達性、功能性和實時性等性質不變,不用進行可達空間分析,從而達到緩解狀態空間爆炸的目的。
1 相關概念
定義1PRES+模型N=(P,T,FI,FO,M0),其中:P={p1,p2,…,pm}是庫所的有限非空集合;T={t1,t2,…,tm}是變遷的有限非空集合;FI?P×T是一組輸入弧的有限非空集合,定義了庫所到變遷的輸入關系流;FO?T×P是一組輸出弧的有限非空集合,定義了變遷到庫所的輸出關系流;M0是N的初始標記。托肯攜帶了時間和數據信息。對于每一個變遷,都存在與之相關的變遷函數、最小變遷時延和最大變遷時延。
將抑制弧加入PRES+模型中,得到PIRES+模型。
定義2PIRES+模型N={P,T,FI,FO,I,M0},其中:P={p1,p2,…,pm}是庫所的有限非空集合;T={t1,t2,…,tm}是變遷的有限非空集合;FI?P×T是一組輸入弧的有限非空集合,定義了庫所到變遷的輸入關系流;FO?T×P是一組輸出弧的有限非空集合,定義了變遷到庫所的輸出關系流;I?P×T(I∩F=?)是抑制弧的有限非空集合;M0:P→N0是N的初始標記,其托肯攜帶了時間和數據信息。
k=
只有當抑制庫所為空時,被抑制的變遷才會被觸發。在圖形上,抑制弧將庫所連接到變遷,并且弧在變遷處以空圓環結束。其余約束與PRES+模型的約束相同。
以下給出兩個PIRES+模型具有相同可達性、功能性和實時性的概念。
定義3兩個PIRES+模型N1和N2若有相同的可達性需滿足:
(1)N1和N2有相同數量的輸入庫所和輸出庫所。
(2) 若把相同數目的托肯數放入N1和N2的輸入庫所中,那么N1和N2的相應輸出庫所得到的托肯數相同。
定義4兩個PIRES+模型N1和N2若有相同的功能性需滿足:
(1)N1和N2有相同的可達性。
(2) 若把具有相同類型標識的托肯放入N1和N2的輸入庫所中,那么N1和N2的相應輸出庫所得到的托肯的類型標識也相同。
定義5兩個PIRES+模型N1和N2若有相同的實時性需滿足:
(1)N1和N2有相同的可達性。
(2) 若把具有相同時間標識的托肯放入N1和N2的輸入庫所中,那么N1和N2的相應輸出庫所得到的托肯的時間標識也相同。
2 化簡規則
2.1 基于T型子網的化簡規則
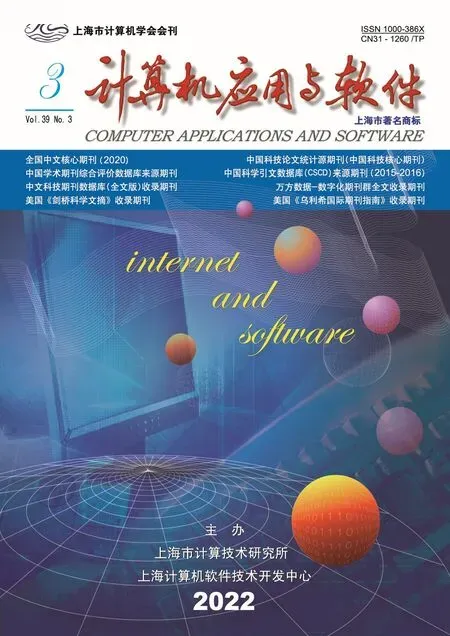
在PIRES+模型中,基于T型子網化簡規則(RST)的前提條件是存在一個T型子網滿足定義6。示例見圖1,T型子網部分被化簡為變遷t。
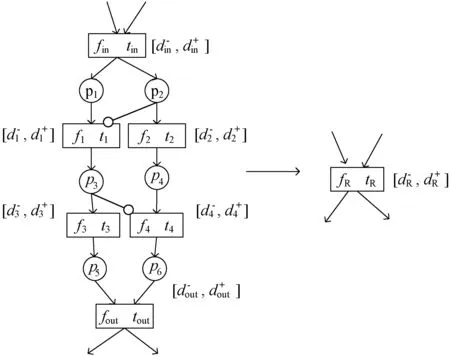
圖1 化簡規則RST示例
定義6若PIRES+模型NR={PR,TR,FIR,FOR,IR,MR,0}是模型N={P,T,FI,FO,I,M0}的子網,需滿足以下條件:
(1)PR?P,TR?T,PR≠?,TR≠?。
(2)FIR=FI∩{(PR×TR)|(PR×TR)?I),FOR=FO∩(TR×PR),IR=I∩{(PR×TR)|(PR×TR)∈I}。

(4) {tin,tout}?TR,tin是NR的唯一輸入變遷,tout是NR的唯一輸出變遷。
(5) 對于?t∈TR,存在變遷函數f:τ(p1)×τ(p2)×…×τ(pn)→(q),·t={p1,p2,…,pn},q∈t。
(6) 對于?t∈TR,存在最小變遷時延d-和最大變遷時延d+,兩者均為非負實數且滿足d-≤d+。
(7) 子網中的抑制弧不會造成網的死鎖。
(8) 同一組庫所和變遷不能同時存在有向弧和抑制弧。
定義7對于PIRES+模型NR={PR,TR,FIR,FOR,IR,MR,0}的變遷集TR-{tin,tout}存在變遷函數fR。對于TR-{tin,tout},?fR:τ(p1)×(p2)×…×τ(pn)→τ(q),其中:(TR-{tin,tout})={p1,p2,…,pn};q∈(TR-{tin,tout})。
以圖1為例,因為變遷t1和變遷t3是串聯關系,變遷t2和變遷t4是串聯關系,t1與t2、t3與t4又分別是并聯關系,所以fs=(f1°f3)‖(f2°f4)(符號° 表示復合操作,符號‖表示并列操作)。


假設1假設PIRES+模型的T型子網NR={PR,TR,FIR,FOR,IR,MR,0}滿足:
(1) 在一個執行過程中(托肯從tin流入通過NR再從tout流出),如果tin被觸發則tout也會被觸發。
(2) 對于PR,如果在初始狀態下無托肯,則在執行過程后也不含托肯。
(3) 在tin被觸發前和tout被觸發后,?t∈TR-{tin,tout},t不處于使能狀態。

(1)P′=P-PR。
(2)T′=T-TR+{t}。



(6)fR=fout°fs°fin。

(8)I′=I-IR。



因為N′-N1=N-N2,所以N′和N有相同的可達性、功能性和實時性。
2.2 基于P型子網的化簡規則
在PIRES+模型中,基于P型子網化簡規則(RSP)的前提條件是存在一個P型子網滿足定義10。示例見圖2,P型子網部分被化簡為庫所p。
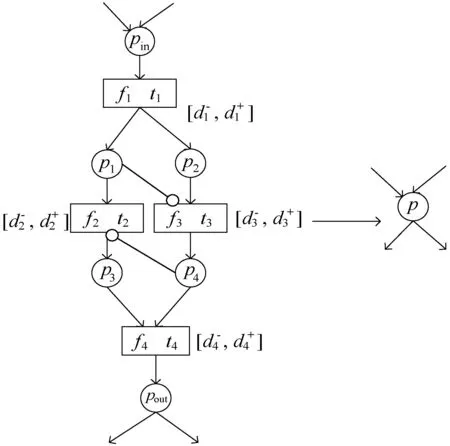
圖2 化簡規則RSP示例
定義10若PIRES+模型NR={PR,TR,FIR,FOR,IR,MR,0}是PIRES+模型N={P,T,FI,FO,I,M0}的P型子網,需滿足:
(1)PR?P,TR?T,PR≠?,TR≠?。
(2)FIR=FI∩{(PR×TR)|(PR×TR)?I),FOR=FO∩(TR×PR),IR=I∩{(PR×TR)|(PR×TR)∈I)。

(4) {pin,pout}?PR,pin是NR的唯一輸入庫所,pout是NR的唯一輸出庫所。
(5) 對于?t∈TR,存在變遷函數f:τ(p1)×τ(p2)×…×τ(pn)→τ(q),·t={p1,p2,…,pn},q∈t·。
(6) 對于?t∈TR,存在最小變遷時延d-和最大變遷時延d+,兩者均為非負實數且滿足d-≤d+。
(7) 子網中的抑制弧不會造成網的死鎖。
(8) 同一組庫所和變遷不能同時存在有向弧和抑制弧。
定義11對于PIRES+模型NR={PR,TR,FIR,FOR,IR,MR,0}的變遷集TR存在變遷函數fR。對于TR,?fR:τ(p1)×τ(p2)×…×τ(pn)→τ(q),其中:·TR={p1,p2,…,pn};q∈TR·。
以圖2為例,因為變遷t1和變遷t3、t2是串聯關系,變遷t4和變遷t3、t2是串聯關系,t3與t2又分別是并聯關系,所以fs=f1° (f3‖f2)°f4。


假設2假設PIRES+模型的P型子網NR={PR,TR,FIR,FOR,IR,MR,0}滿足:

(2)PR如果在初始狀態下無托肯,則在執行過程后也不含托肯。

(1)P′=P-PR+{p}。
(2)T′=T-TR。



(8)I′=I-IR。


因為N-N1=N′-N2,所以N′和N有相同的可達性、功能性和實時性。
3 應用實例
本節以一個基于手機通信模型的簡化實例來說明PIRES+模型化簡規則的有效性。
系統初始化后,首先進行終端和鍵盤的初始化,然后打印無線通信菜單,通過創建鍵盤控制子程序完成手機號的撥入與撥出。該系統的PIRES+模型如圖3所示。

圖3 基于嵌入式的手機通信模型
在該模型中,各變遷的含義為:t1表示系統初始化;t2表示終端初始化;t3表示鍵盤初始化;t4表示打印無信通信菜單;t51表示接受鍵盤輸入;t52表示控制命令判斷;t53表示無效信息輸入;t54表示撥入號碼;t55表示撥出號碼;t56表示系統循環等待;t61表示檢測是否停止;t62表示停止;t63表示未停止;t7表示返回。
該PIRES+模型中虛線所標注部分為T型子網N1,使用基于T型子網的化簡規則RST進行化簡得到初步化簡模型N′,結果如圖4所示。
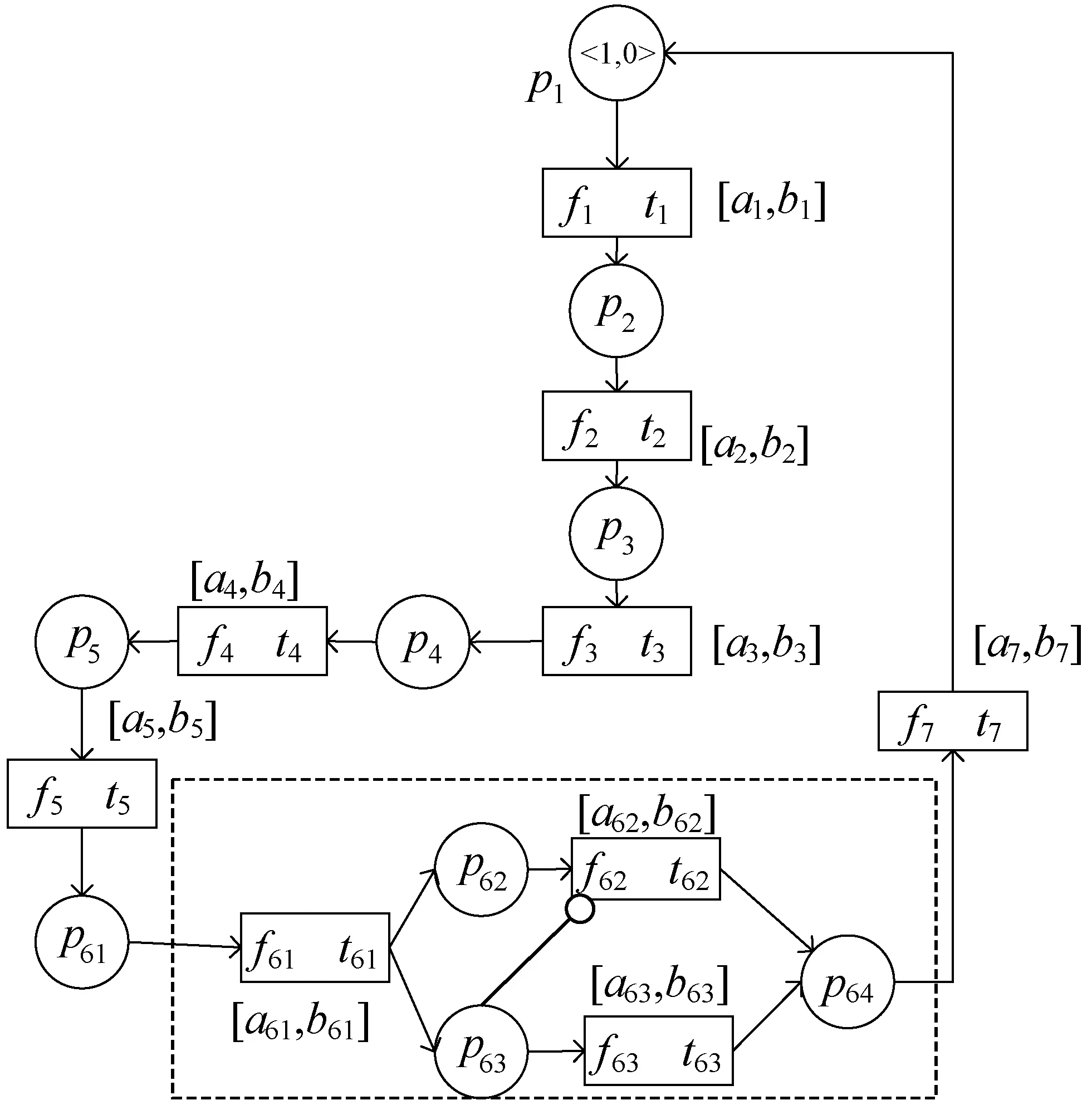
圖4 使用RST規則后的化簡結果
圖4中,f5=f51° ((f52° (f54‖f55))‖f53)°f56,a5=a51+max(a52+max(a54,a55),a53)+a56,b5=b51+max(b52+max(b54,b55),b53)+b56。根據定理1得,所得的初步簡化模型N′與原模型有相同的可達性、功能性和實時性。
對于模型N′,虛線所標注部分為P型子網N2。使用基于P型子網的化簡規則RSP進行化簡,得到模型N″(如圖5所示)。

圖5 使用RSP規則后的化簡結果

對于模型N″,虛線所標注部分可用基于T型子網的化簡,得到最終的簡化模型Nr(如圖6所示)。
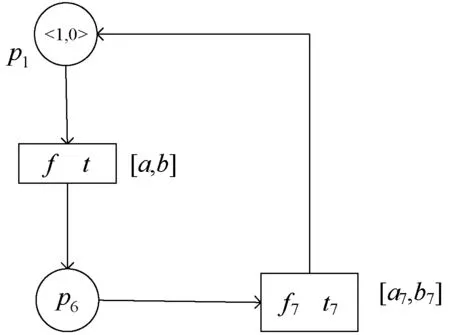
圖6 最終化簡結果

綜上所述,最終得到的模型Nr與原模型N有相同的可達性、功能性和實時性。
4 結 語
本文在PRES+的基礎上加入抑制弧,得到PIRES+模型。PIRES+模型增強了建模能力,但是在建模和分析過程中存在狀態空間爆炸問題。為了緩解此問題。本文提出PIRES+的兩種化簡規則,并且證明了化簡后所得模型與原模型有相同的可達性、功能性和實時性。本文的實例說明了該化簡規則的有效性。
猜你喜歡
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
鐵道通信信號(2018年2期)2018-04-18 12:18:23
Coco薇(2017年11期)2018-01-03 20:59:57
電鍍與環保(2016年3期)2017-01-20 08:15:32
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
山東青年(2016年1期)2016-02-28 14:25:25
單片機與嵌入式系統應用(2014年9期)2014-03-11 15:35:13
自動化博覽(2014年4期)2014-02-28 22:31:15
當代修辭學(2014年3期)2014-01-21 02:30:44