交叉路口轎車-電動兩輪車的AEB 控制策略研究?
2022-03-18 06:20:52錢宇彬郭風虎
計算機與數字工程 2022年12期
祝 琳 錢宇彬 郭風虎
(上海工程技術大學 上海 201620)
1 引言
隨著人們經濟水平的提高和汽車技術的不斷發展,汽車已經逐漸成為家庭的標配,隨之而來的問題就是道路交通的擁堵程度日益增加,交通事故的數量也在逐年增加[1],研究表明,在我國交通事故發生率是發達國家的6 倍~18 倍[2]。通過分析我國道路交通情況,可以發現在交叉路口處的事故發生率占到了總體交通事故70%,而在交叉路口處發生的事故又有70%~90%是因為駕駛員操作不當所造成的[3]。如今交通的擁擠程度在逐漸增加,人們為了節約時間和考慮環保等因素,電動兩輪車逐漸成為人們短距離出行的主要交通工具,涉及電動兩輪車的交通事故量、騎車人傷亡數都在急劇上升,如何在駕駛員未操作的情況下進行車輛控制,從而避免碰撞顯得尤為重要[4]。國內外根據真實的事故對車-車避撞中AEB 系統在各種事故形態下的效果進行了研究,并根據相關研究對AEB 系統進行了測試與優化,建立了相關AEB 系統的測試方法[5~12],但是借鑒國外的測試場景不能夠反映復雜的中國道路交通特征,目前還沒有針對具有中國特色的電動兩輪車的主動避撞系統。因此本文將對危險目標為電動兩輪車的事故進行分析,進行交叉路口處汽車對電動兩輪車的AEB 控制策略的研究。
2 建立事故信息數據庫
論文以所選的NAIS-松江地區的62 起真實轎車-電動兩輪車事故案例進行深度分析,并通過PC-Crash 軟件進行事故重建,整合得到完整的前期數據庫,數據樣本信息見表1。
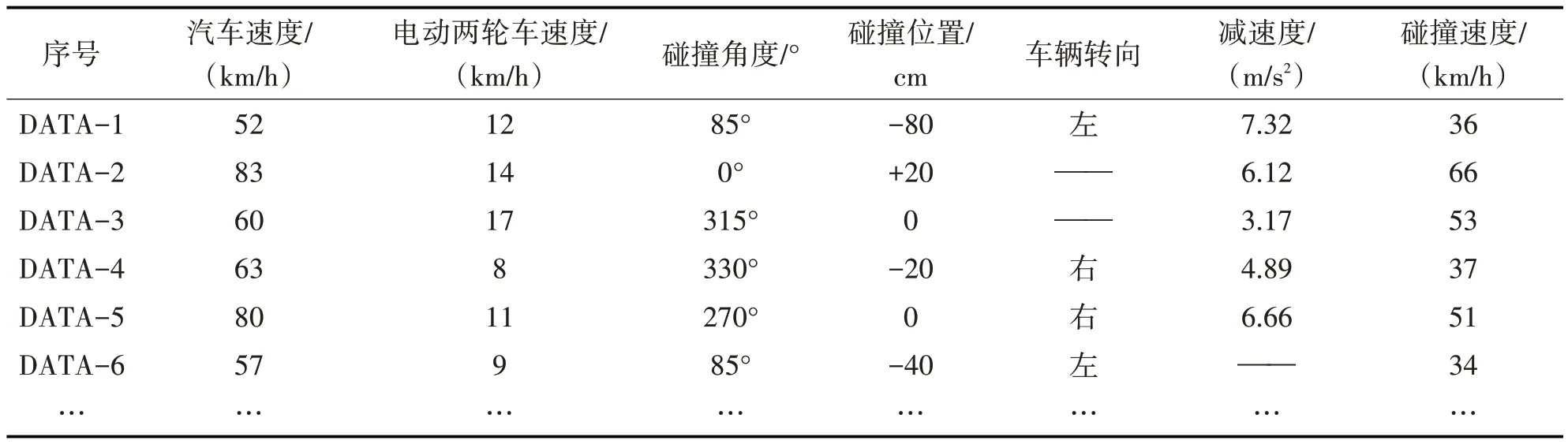
表1 事故信息
3 分級制動策略設計
3.1 預警及分級制動工況
針對國內復雜的交通場景,分級制動[13]選用了三種情況分析汽車與電動兩輪車的運動工況。
1)接近靜止障礙物
當進行部分制動時可以判斷制動距離為
2)接近勻速障礙物
自身車輛制動距離:
3)接近減速障礙物
自身車輛制動距離:
前車制動距離:
3.2 預警及制動時間閾值
在建立事故信息數據庫中,有22 起事故是包含有EDR 數據,對于車輛在不同減速度下,達到最優的避撞程度做了相關統計,如表2 所示,考慮到車內的乘員制動沖擊和制動時可能出現的車身不穩定因素[14],制動時間和制動減速度需要有一個閾值。
在仿真過程中,根據自車與電動兩輪車之間的狀態,LRR,SRR 實時監測兩車之間的距離,由兩車之間的相對速度,計算出即將發生碰撞時間T,由此可判斷時間指標Tb,定義:1)Tb=3.7s 時,執行AEB 系統的預警策略,提示駕駛員,前方有危險發生,監測駕駛員是否對車輛采取措施解除危險。2)如果駕駛員未對車輛進行采取措施,將在Tb=1.7 s時對車輛施加4m/s2的制動減速度進行預制動使車速降下來一部分,從真實EDR數據和表2中可知駕駛員最常用的制動減速度為4m/s2~5m/s2,考慮到策略可靠性和駕駛員舒適性,選用4m/s2的制動減速度進行預制動,此狀態下車輛的事故避免率也在60%~70%左右。3)如果在預制動情況下,駕駛員未進行緊急制動或者仍然不能避免事故發生,則會在Tb=0.7s時對車輛施加8m/s2的制動減速度,以此減速度至車輛停止或與障礙物發生碰撞為止。
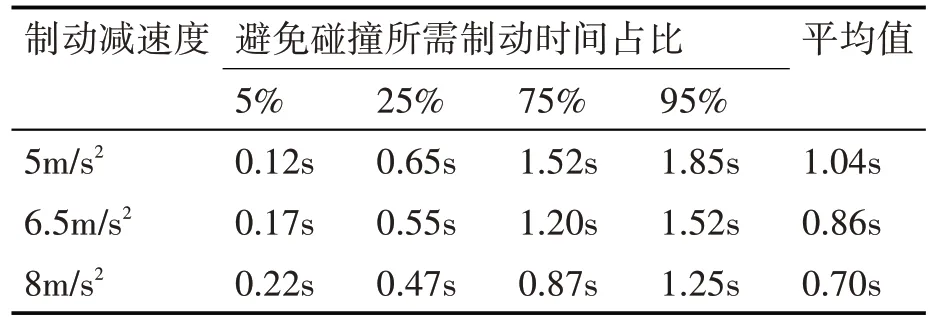
表2 不同減速度下避撞時間占比
4 仿真驗證
本次仿真車輛各參數模型調用CarSim 中已經搭建好的車輛動力學模型,電動兩輪車選用系統自帶模型,進行基本參數調整,給定運動特性,通過調入的毫米波雷達、雙目攝像頭傳感器模型,進行整體的仿真驗證工況。本文參考2018 版C-NCAP 的要求,選用CCRs、CCRm、CCRb三個測試場景,即自身車輛運動,目標車輛的運動情況分別為靜止、勻速、減速[15]。再對汽車直行電動兩輪車橫向通過路口這個場景進行仿真分析,驗證車輛在轉向制動后對駕駛員的碰撞損傷減小情況的影響。毫米波雷達安裝在保險杠正中間位置,雙目攝像頭安裝在前風擋玻璃上端中間,方向皆為縱向水平向前[16]。
4.1 汽車接近靜止目標
1)以30km/h接近靜止目標
仿真工況:自車車速為30km/h 初始速度行駛,和目標電動兩輪車之間的距離為100m,電動兩輪車靜止。
如圖1~圖4 所示,自車勻速行駛8.28s 后Tb達到車輛危險預警系統啟動閾值,繼續前行檢測時間指標Tb達到制動閾值1.7s,此時AEB 向車輛輸出-4m/s2的制動減速度,車輛勻減速接近目標。時間指標Tb持續減小,但減小速率有所下降,在11.28s 時時間指標Tb小于0.7s,此時啟動緊急制動策略,控制策略向車輛輸出-8m/s2的制動減速度。當11.84s自車車輛停止,此時自車和目標車輛之間的距離為3.22m。驗證了文中設計的控制策略在此工況下可以避免碰撞事故的發生。
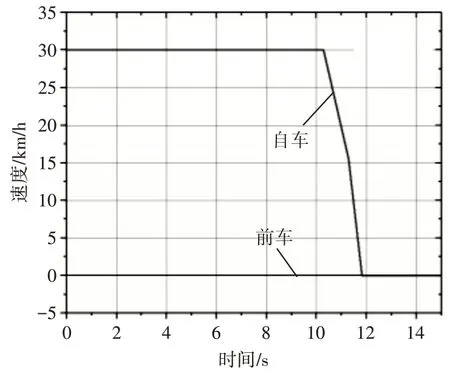
圖1 兩車速度變化曲線
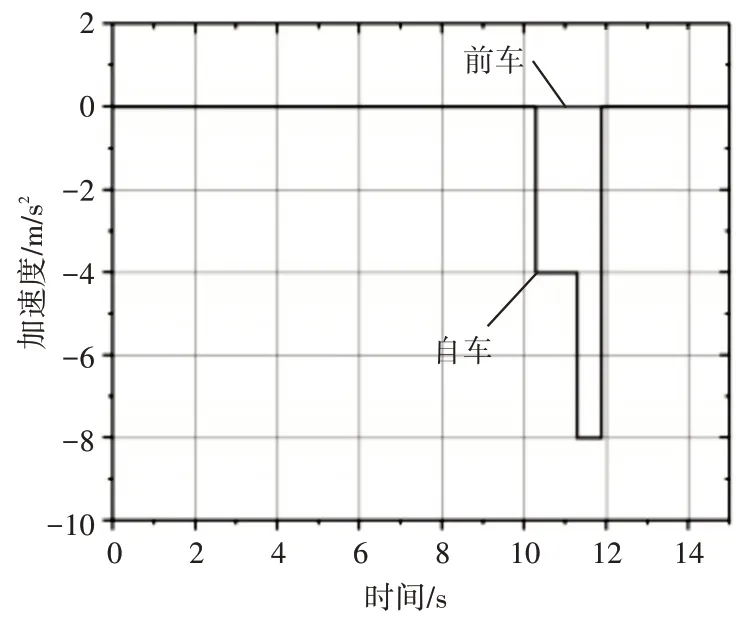
圖2 兩車加速度變化曲線
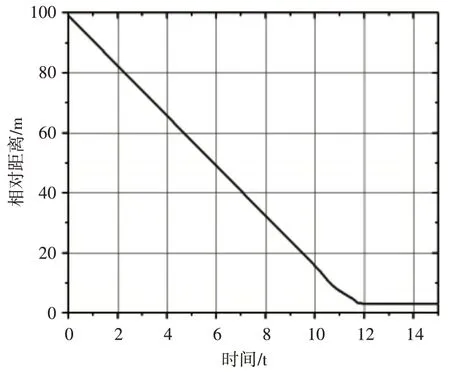
圖3 兩車相對距離變化曲線
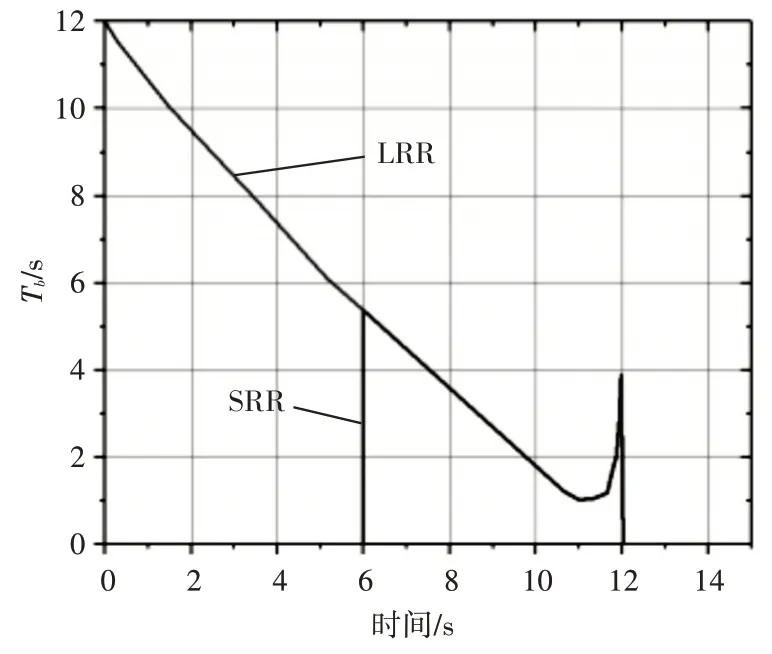
圖4 時間指標Tb變化曲線
2)以65km/h接近靜止目標
仿真工況:自車車速為65km/h 初始速度行駛,和目標電動兩輪車之間的距離為150m,電動兩輪車靜止。
如圖5~圖8,車輛行駛4.6s 后預警系統被觸發,提示駕駛員危險接近,當Tb值小于等于1.7s時,AEB 輸出一個-4m/s2的制動減速度,使車輛速度降下來在進行判斷,在8.21s 時發現當Tb值小于0.7時,控制策略會輸出一個-8m/s2的制動減速度,使車輛速度進行緊急降低或靜止,最后在9.77s 時停止在距離目標1.65m。則可以認定為設計的控制策略可以在此工況下達到避撞效果。
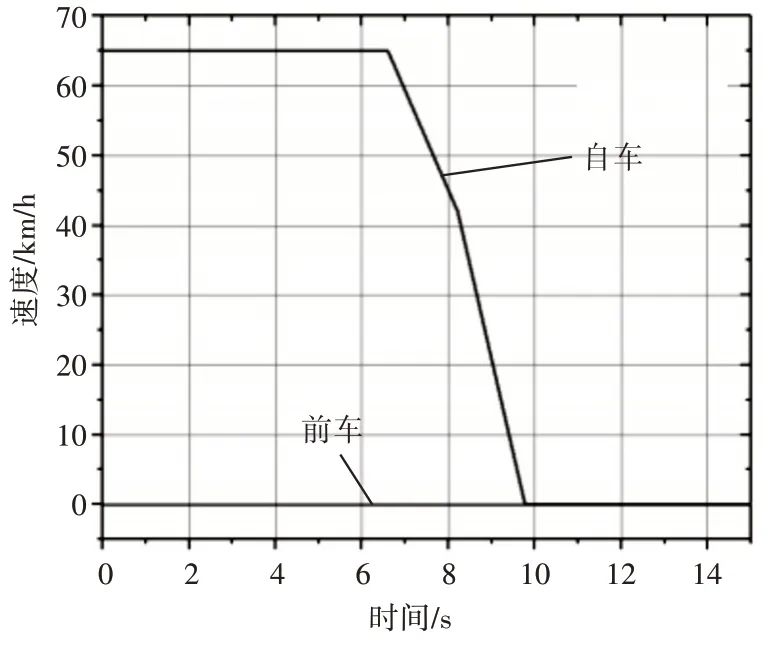
圖5 兩車速度變化曲線

圖8 時間指標Tb變化曲線
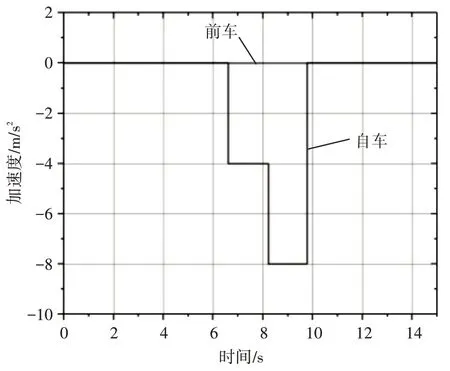
圖6 兩車加速度變化曲線
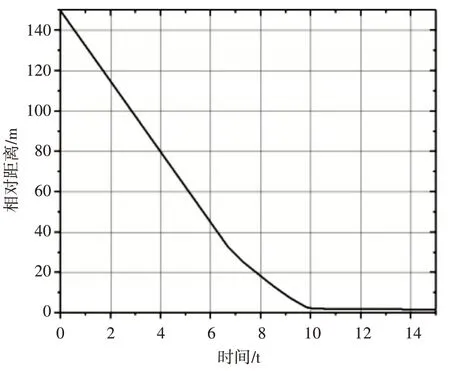
圖7 兩車相對距離變化曲線
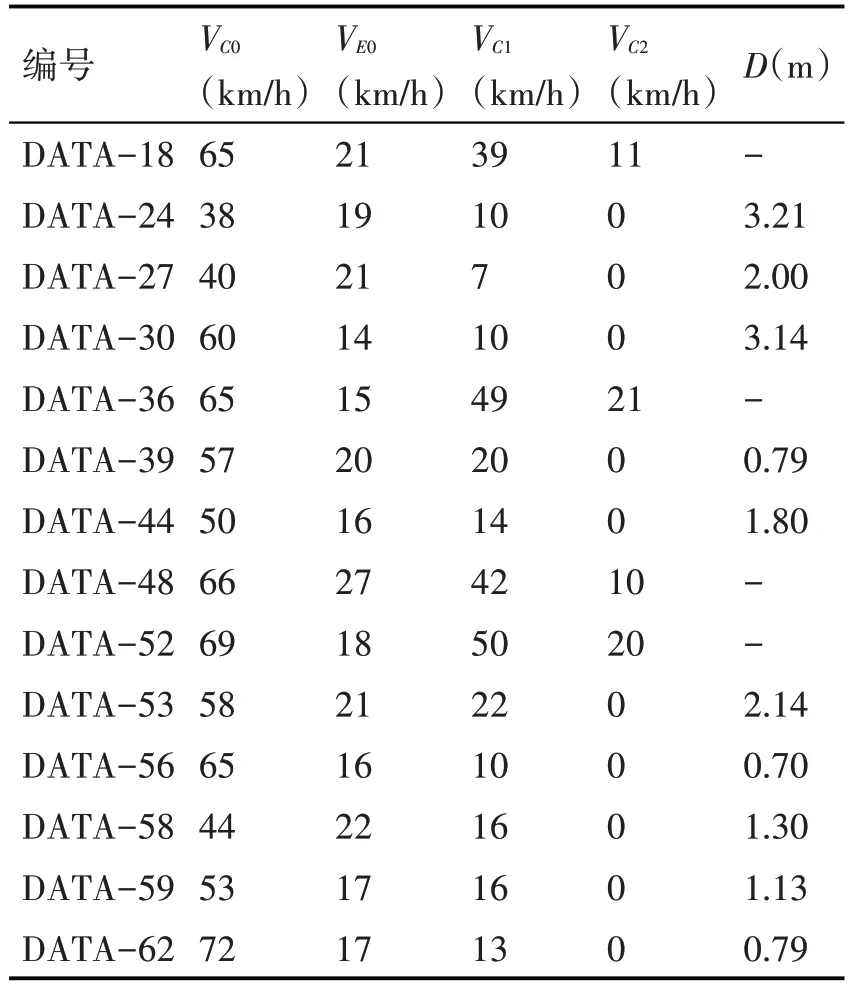
對前期建立的數據庫中的14 起關于自車接近靜止目標的真實交通事故案例均進行仿真分析,得出的結果與原事故進行對比,結果如表3。
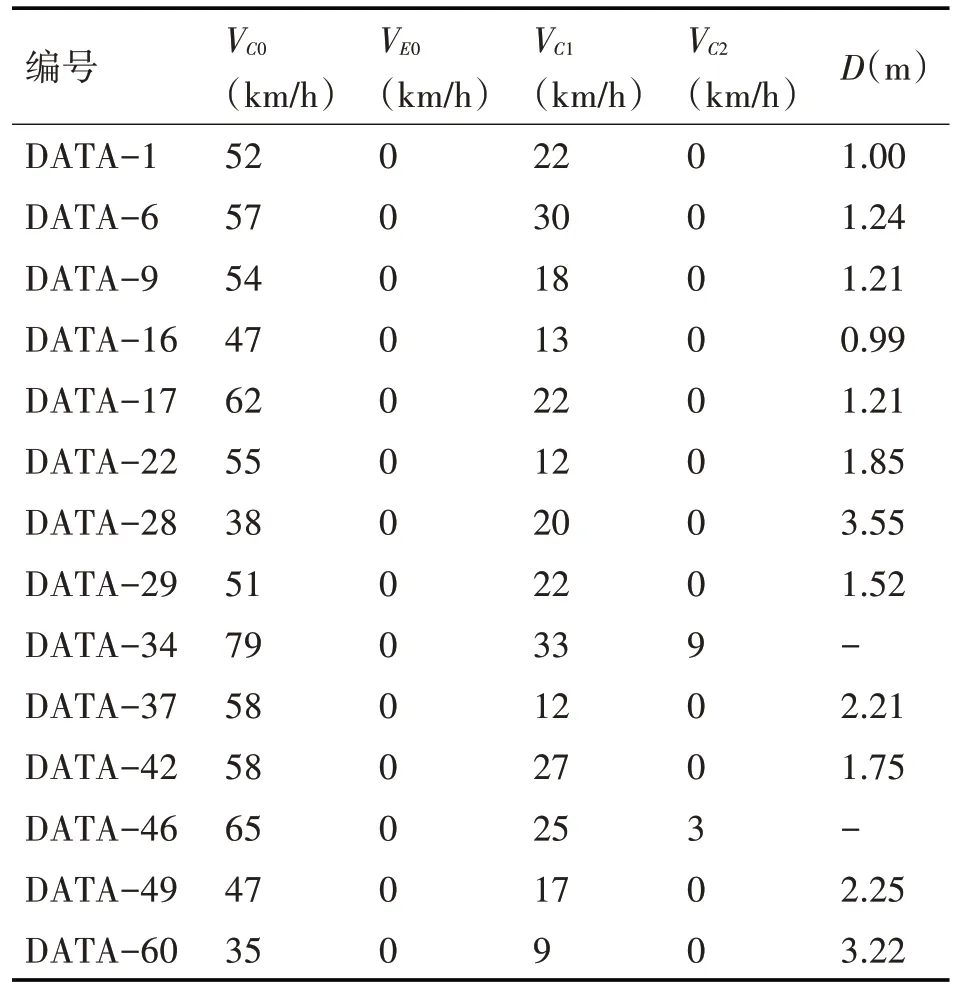
表3 CCRs場景真實事故與仿真結果對比
4.2 其他工況
對汽車接近勻速目標場景下的14起真實交通事故,汽車接近勻減速目標的14 起,汽車接近橫向勻速運動目標的18 起,分別帶入AEB 控制策略進行仿真驗證,得出的結果與原始的事故數據進行對比,分析AEB 控制策略的效用,分別如表4~表6 所示。
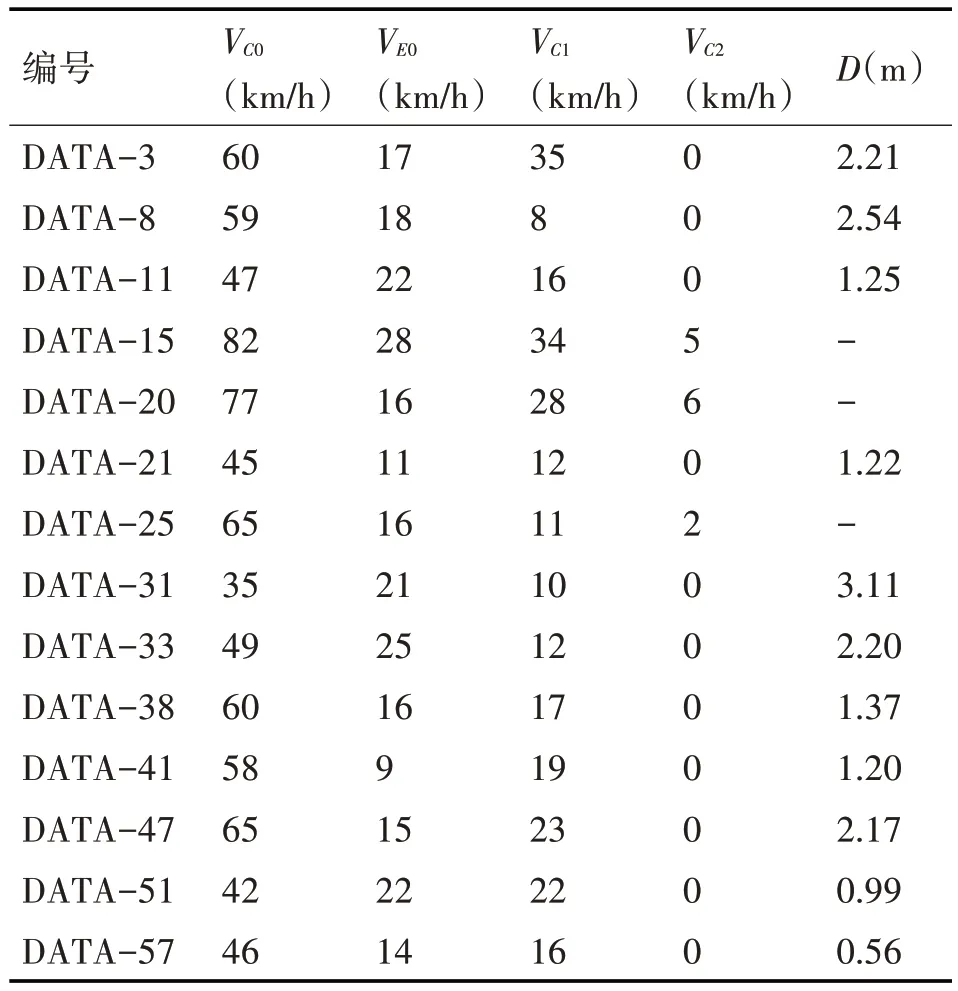
表4 CCRm場景真實事故與仿真結果對比
DATA-18 DATA-24 DATA-27 DATA-30 DATA-36 DATA-39 DATA-44 DATA-48 DATA-52 DATA-53 DATA-56 DATA-58 DATA-59 DATA-62 65 38 40 60 65 57 50 66 69 58 65 44 53 72 21 19 21 14 15 20 16 27 18 21 16 22 17 17 39 10 7 10 49 20 14 42 50 22 10 16 16 13 11 0002 1 001 0 20 00000-3.21 2.00 3.14-0.79 1.80--2.14 0.70 1.30 1.13 0.79編號 VC0(km/h)VE0(km/h)VC1(km/h)VC2(km/h) D(m)
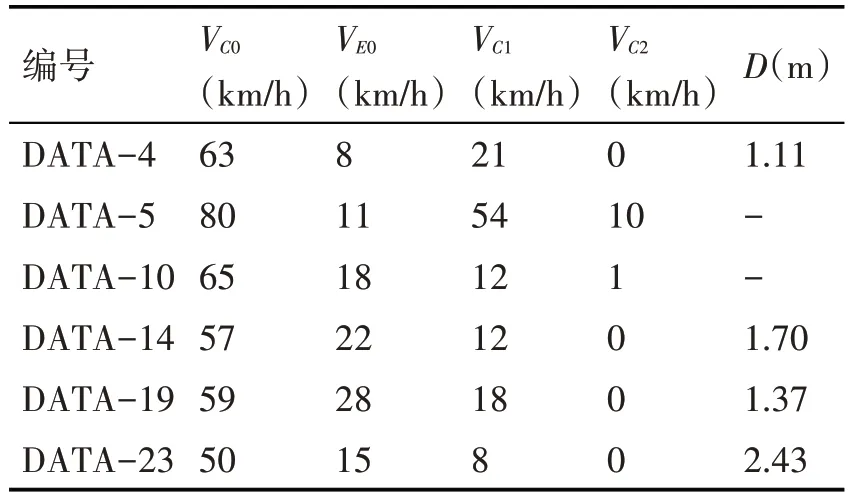
表5 CCRb場景真實事故與仿真結果對比
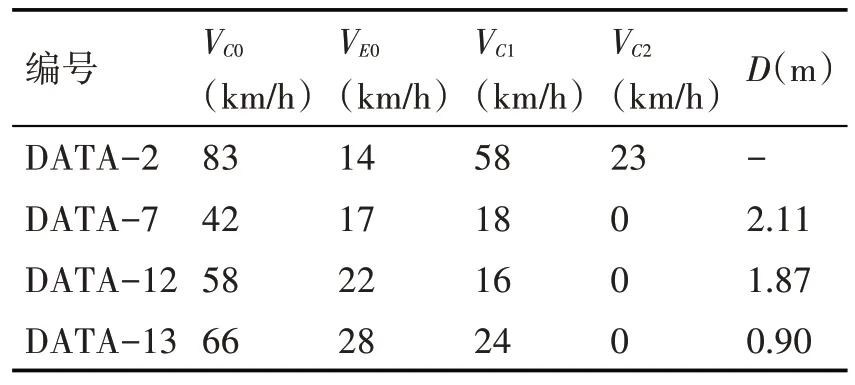
表6 橫向勻速場景真實事故與仿真結果對比
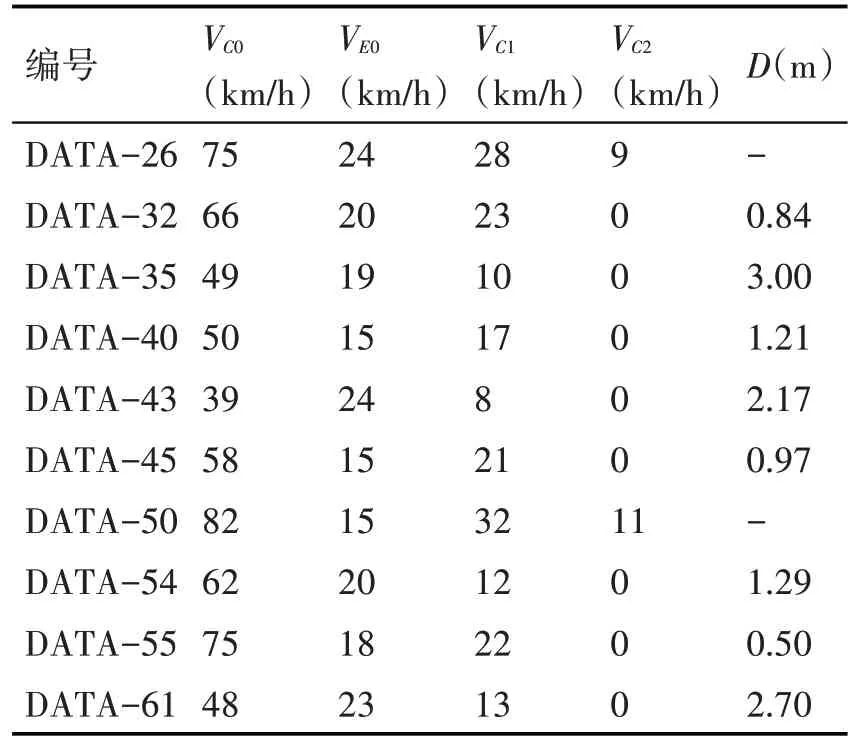
DATA-26 DATA-32 DATA-35 DATA-40 DATA-43 DATA-45 DATA-50 DATA-54 DATA-55 DATA-61 75 66 49 50 39 58 82 62 75 48 24 20 19 15 24 15 15 20 18 23 28 23 10 17 8 21 32 12 22 13 9000001 1 000-0.84 3.00 1.21 2.17 0.97-1.29 0.50 2.70編號 VC0(km/h)VE0(km/h)VC1(km/h)VC2(km/h) D(m)
4.3 仿真結果與真實事故數據對比分析
由上文分析整理可以得到AEB 系統仿真效用分析結果,如表7。

表7 AEB系統仿真效用
由表可知,論文中AEB 控制策略在基于真實事故數據的驗證中,效果較為明顯。汽車車速為65km/h 以下時,接近靜止目標的避撞率達到91.7%,接近勻速目標時避撞率達到91.7%,接近減速目標時達到90.9%,接近橫向勻速目標時避撞率相對偏低為84.6%,車速大于65km/h時的避撞率都有所下降。但通過表3~表6的詳細參數可以看出,無法避免碰撞發生的案例,碰撞時車速也相較原始數據有了較為明顯的降低,可以有效地降低碰撞對騎車人帶來的傷害。
5 結語
論文按照C-NCAP中對AEB測試場景的規范,將62 起轎車-電動兩輪車事故在仿真系統中添加AEB 控制策略后進行驗證,對此AEB 系統作用前后的避撞效果做了分析,結果表明:汽車車速在65km/h 以下時,汽車接近前方靜止電動兩輪車、勻速行駛電動兩輪車、勻速制動兩輪車場景下避撞成功率均在90%以上,在汽車接近橫向勻速行駛電動車的場景下,避撞率為84.6%,AEB 系統介入后,不能避免的碰撞事故,車速也有明顯降低,可以有效減小碰撞對騎車人的傷害。驗證了文中設計的AEB系統控制策略的可靠性。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
汽車電器(2018年1期)2018-06-05 01:22:54
公民與法治(2016年4期)2016-05-17 04:09:26
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24